2.1. Traditional RMA
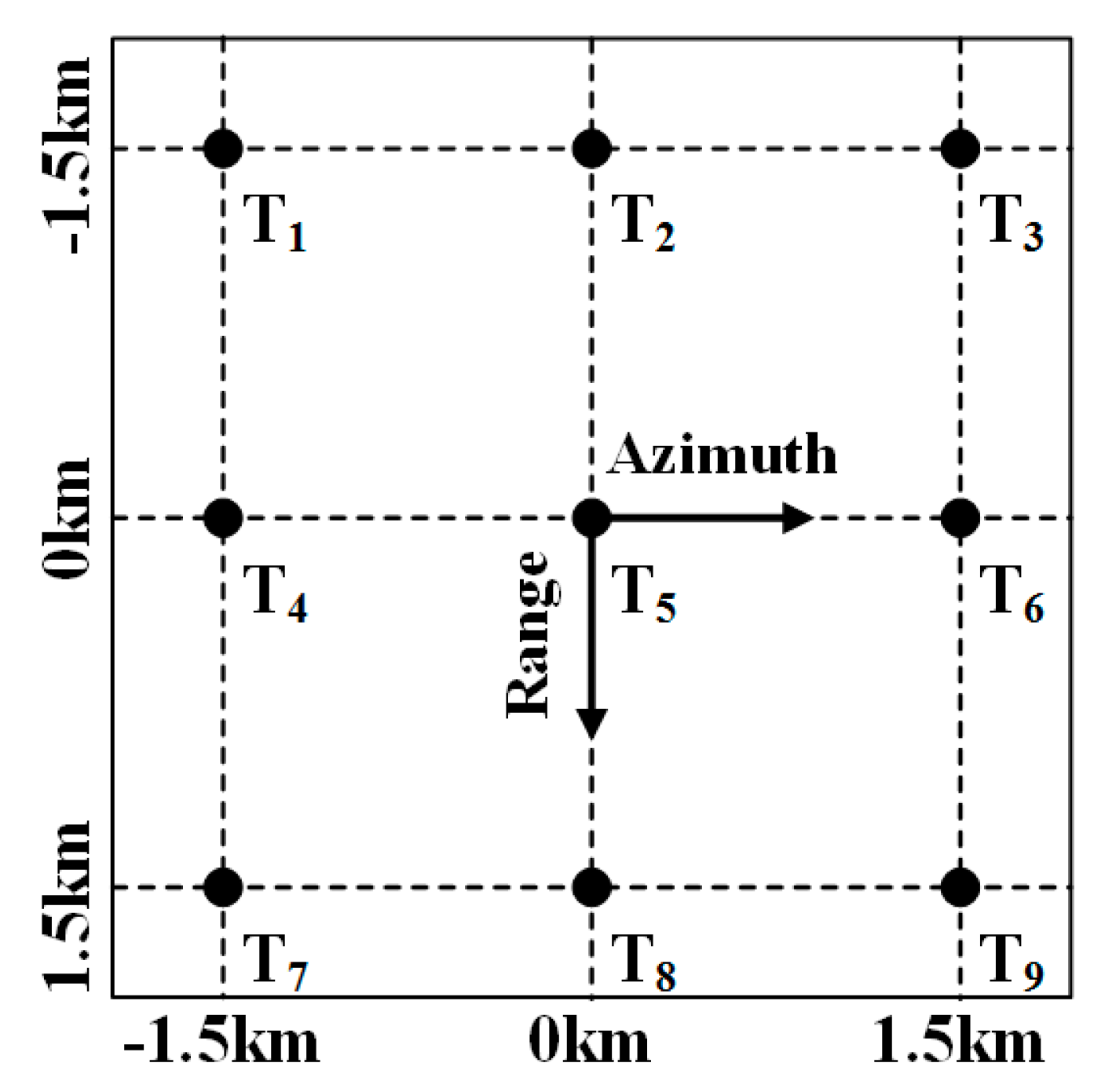
In this part, a brief introduction on traditional RMA is demonstrated. The geometry of spaceborne spotlight SAR is shown in
Figure 1. The black dashed track with an arrow in
Figure 1 denotes approximate straight path while the red ellipse represents curved orbit of true satellite motion. In
Figure 1, the blue dashed lines and circle illustrate that the beam illuminates the target all the time during collecting SAR data. T denotes the illuminated target and O denotes the position of zero Doppler on the curved orbit.
Ra(
η) is the slant range between the radar and a target at azimuth time
η and
r represents the closest slant range.
The traditional RMA is acquired under the consideration of uniform linear motion. After modulation to baseband, the echo signal of point target T is able to be described in terms of range time
τ and azimuth time
η as follows:
The amplitude factors have been ignored. wr(•) is the range envelope, wa(•) is the azimuth envelope, c is the velocity of light, Kr is the range frequency modulation rate, f0 is the carrier frequency and j is the imaginary unit.
In the scenario of uniform linear motion, the slant range is modelled by the hyperbolic equation with the velocity
v and closest slant range
r as follows:
By performing 2D Fourier transform (FT) on Equation (1) via the method of stationary phase with the slant range model in Equation (2), the 2D spectrum of echo signal can be represented as follows:
In Equation (3), fτ and fη are range and azimuth frequency, respectively. And Wr(•) is the envelope of the range frequency while Wa(•) is the envelope of the azimuth frequency.
The first step in traditional RMA is the RFM. The reference function in 2D frequency domain can be chosen as conj[S2df(fτ,fη;Tref)], which is the conjugated 2D spectrum of the reference target. Tref denotes the reference point target and conj[•] denotes conjugation operation.
The RFM operation can be expressed as follows:
The RFM operation completely cancels the range migration of all targets at the reference range. Nevertheless, the RFM only partly corrects the range migration of targets at other ranges. Therefore, a subsequent Stolt interpolation is implemented so as to compensate the residual quadratic and higher order phase modulation. In the scenario of uniform linear motion, The Stolt interpolation is defined as follows:
After implementation of Stolt interpolation, the SAR data is transformed into the new domain (
,
fη) as follows:
By performing 2D Inverse FT to Equation (6), the echo data can be transformed into time domain. As a result, a finely focused SAR image is acquired as follows:
2.2. Modified RMA
When spaceborne spotlight SAR is desired to achieve ultrahigh resolution in decimeter level, the motion of platform of SAR is unable to be treated as uniform linear motion. Therefore, curved orbit is required to be considered in algorithms for SAR imaging. The modified RMA is proposed to deal with SAR data on curved orbit. In the modified RMA, the expression of 2D spectrum of echo data is derived by combining the range model in [
11] with series reversion. Subsequently, the formula of 2D spectrum of reference point is used to implement RFM operation. Then, SVD is applied for numerically decomposing the expression of 2D spectrum so as to obtain coordinates for Stolt interpolation. After Stolt interpolation, focused image is able to be acquired via 2D inverse Fourier transform.
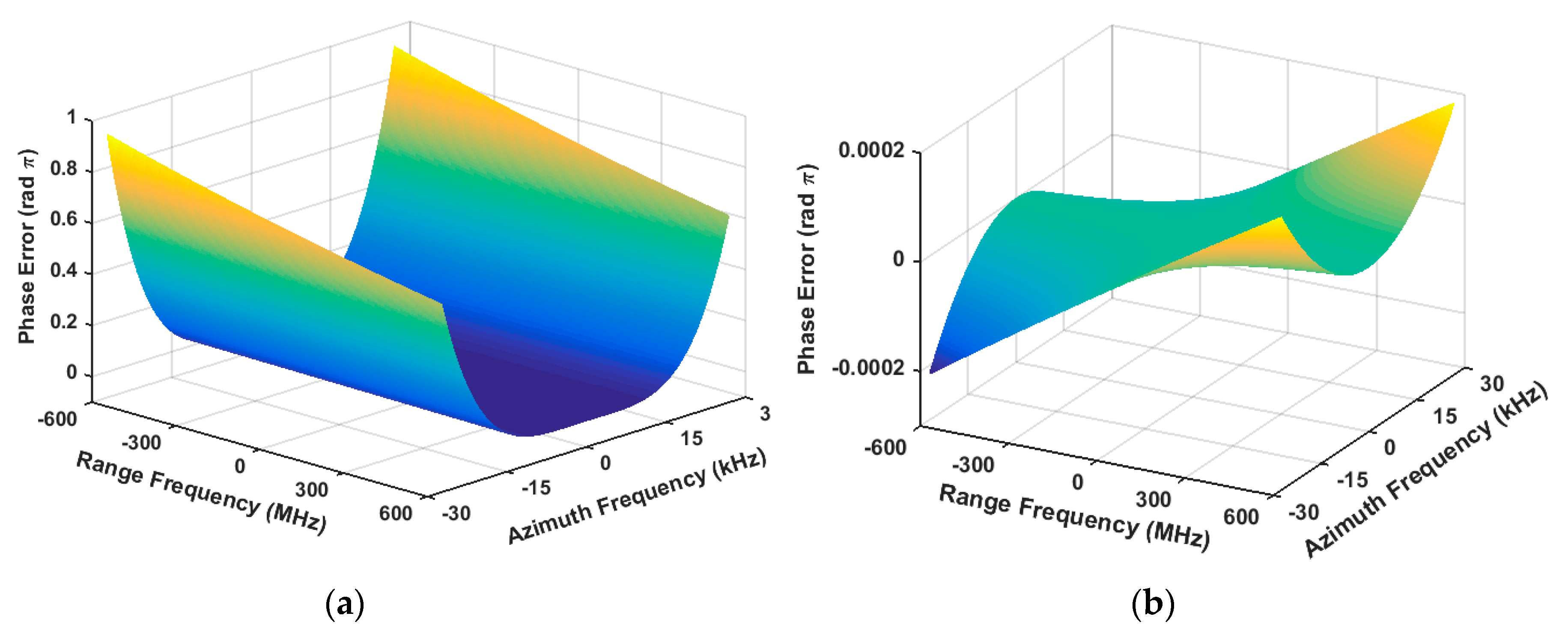
In comparison with the traditional RMA, the slant range model and the expression of the 2D spectrum in modified RMA are capable of accommodating the curved orbit while the traditional RMA is only able to deal with the scenario of uniform linear motion. Additionally, although the generalized ωK is able to cope with the scenario of curved orbit, the modified RMA has much smaller phase error than the generalized ωK when azimuth bandwidth is larger than 49 kHz. SVD, which is applied in modified RMA, is able to provide numerical decomposition with much smaller phase error than the first-order multivariable Taylor expansion in the generalized ωK. Therefore, the modified RMA performs better than the generalized ωK when the azimuth resolution achieves 0.14 m. The modified RMA is derived and presented in this part.
In the scenario of curved orbit, the slant range is inaccurate to be modelled as the hyperbolic equation in Equation (2). Therefore, it is necessary to utilize more accurate slant range model for curved orbit. The slant range model in the literature [
11] is capable of modelling the slant range between radar and target in the scenario of curved orbit. According to the literature [
11], the slant range between the radar and a target can be expressed in terms of azimuth time
η as follows:
The definitions of
e0,
e1,
e2,
e3 and
e4 are presented from Equations (9)–(13). And ◦ denotes inner product operation.
The R, V, A, B and C present relative position, velocity, acceleration, rate of acceleration, and rate of rate of acceleration 3-dimentional vectors between the radar and a target, respectively.
With a fourth-order Taylor expansion in azimuth time
η, the
Ra(
η) can be expressed as follows:
The coefficients in Equation (14) are obtained according to the formula in Equation (15). And the expressions of
g0,
g1,
g2,
g3 and
g4 are given in Equations (16)–(20).
By implementing a FT along the range direction to the echo signal in Equation (1) with the method of stationary phase, the signal can be given as follows:
The definition of
Rc(
η) is presented in Equation (22) as follows:
The second exponential term in Equation (21) represents linear range cell migration (LRCM). In order to derive the 2D spectrum via series reversion, the exponential term of LRCM is temporarily removed. After removal of LRCM, the point target signal in range frequency and azimuth time domain is presented as follows:
The
k is defined as follows:
Via the method of stationary phase, the azimuth frequency
fη is associated to the azimuth time
η as follows:
By using series reversion, the azimuth time
η can be expressed in terms of the azimuth frequency
fη as follows:
Using Equation (26) with Equation (23), the 2D spectrum of
sc(
τ,
η;T) can be expressed as follows:
According to the shift property of FT, the 2D spectrum of
s(
τ,
η;T) can be obtained as follows:
The FTa denotes FT operation along azimuth direction.
After the expression of 2D spectrum of echo signal has been acquired, the RFM operation can be presented as follows:
The T
ref denotes reference target, the
rref represents reference closest slant range and the
Θref denotes
Θ of reference target. Subsequently, for each azimuth frequency
fη, it is assumed that there exists a decomposition for
θRFM as follows:
In Equation (32),
β takes charge of Stolt interpolation and
γ denotes the difference of the closest slant range between the target T and the reference target T
ref. Then, the Stolt interpolation is defined as follows:
Here,
β(:,
fη) denotes any column in matrix
β. After Stolt interpolation, the SAR data is transformed into the new (
,
fη) domain as follows:
The variation of
γ with azimuth frequency is much smaller than the pixel cell in range direction when resolution achieves decimeter level. As a result, the influence caused by variation of
γ on SAR image focusing can be ignored. And the following approximation can be given:
As a result, by operating 2D IFFT to Equation (34), the data can be transformed into time domain, and then a well-focused image can be acquired as follows:
The critical point of modified RMA is to obtain the decomposition in Equation (32). Then, SVD is competent to obtain the numerical approximation of decomposition in Equation (32). The purpose of this decomposition is to acquire a matrix for Stolt interpolation.
Actually, β is unable to be acquired directly with SVD. The matrix Φ introduced in the following part is prepared for Stolt interpolation, which can be acquired directly with SVD. In the sense of calculating coordinate for Stolt interpolation, the matrix Φ is consistent with the matrix β. As a result, the matrix Φ can be obtained with the decomposition in Equation (32).
Range and azimuth sampling point number of echo data are defined as N
r and N
a, respectively. For each
fη, a matrix
Ψi with size N
r × N
E can be constituted by the phase
θRFM of different target points, and N
E is the number of point targets for SVD. The matrix
Ψi can be acquired as follows:
The
θRFM(:,
fη;T
m) denotes the column in
θRFM for each
fη of the m-th target. Here, m = 1, 2, …, N
E. SVD(•) is defined as the operation of SVD, and SVD is performed to
Ψi as follows:
In Equation (38), superscript H denotes conjugate transpose operation, Ui is left singular vector matrix with size of Nr × Nr, Σi is an Nr × NE matrix with singular values on the diagonal and Vi is the right singular vector matrix with size of NE × NE.
Figure 2 presents a demonstration of singular values.
Figure 2a presents amplitudes of the first three singular values in decibels, which are normalized by the amplitude of the largest first singular value. Amplitudes of the first singular values in each azimuth frequency are shown in
Figure 2b. Singular values in
Figure 2 are acquired with the parameters in
Table 1 and
Table 2. As shown in
Figure 2a, it is apparent that first singular values are much larger than second, and third singular values in each azimuth frequency. Consequently, the decomposition of
Ψi can be approximated as follows:
In (39), ui,1 denotes the first column of matrix Ui, σi,1 denotes the first singular value corresponding to Ψi and vi,1 denotes the first column of matrix Vi.
Figure 2b illustrates that first singular values in different azimuth frequency are not constant and vary with azimuth frequency. In essence, performing SVD to
Ψi in each
fη is intended to obtain numerical results of decomposition in Equation (32). By comparing Equation (32) with Equation (39) and considering information indicated in
Figure 2b, it is reasonable that singular values should not be ignored in generating matrix for Stolt interpolation. Different from SVDS, modified RMA in this paper takes the singular value into consideration and acquires
φi as follows:
After SVD operation in each
fη, the obtained
φi can be arrayed to form a matrix as follows:
The procedure of acquiring matrix
Φ is presented in
Figure 3. And
Φ is a matrix with size of N
r × N
a.
The connection between the decomposition in Equation (32) and the decomposition in Equation (39) can be presented as follows:
In Equation (42), θRFM(:,fη;T1) denotes any column in θRFM of target T1, denotes the first element in and α is a constant for associating the decomposition in Equation (32) with decomposition in Equation (39). As α is a constant, the interpolation coordinates calculated from Φ is the same as the interpolation coordinates calculated from β. Therefore, the matrix Φ is able to calculate interpolation coordinates for Stolt interpolation. As a result, acquisition and derivation of reference function and Stolt interpolation coordinates in the Modified RMA have been presented in this part.
2.3. Modified Deramping-Based Approach
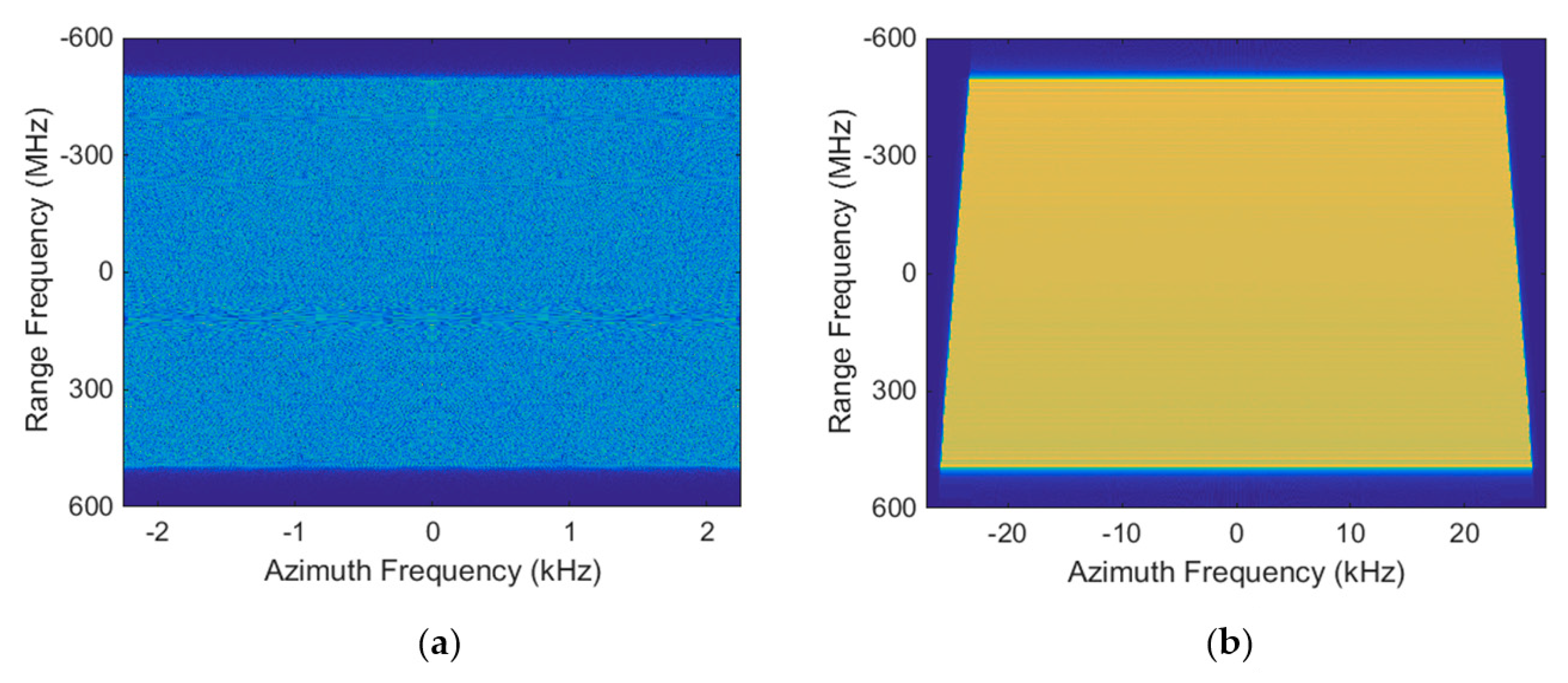
According to the Nyquist sampling theory, the pulse repetition frequency (PRF) should be larger than the azimuth bandwidth of echo data so as to avoid azimuth spectral aliasing problem. Nevertheless, in the scenario of high resolution spaceborne spotlight SAR, the PRF is usually smaller than the azimuth bandwidth. As a result, the phenomenon of azimuth spectral aliasing occurs in the situation of high resolution. Therefore, the traditional deramping-based approach is proposed to deal with the azimuth spectral aliasing problem under the consideration of uniform linear motion.
However, curved orbit is desired to be taken into consideration in spaceborne SAR when azimuth resolution achieves 0.14 m. Consequently, the traditional deramping-based approach is not suitable for the situation of curved orbit. Therefore, a modified deramping-based approach is proposed to solve azimuth spectral aliasing problem on curved orbit in this part. Orbital state vectors are utilized to estimate the Doppler parameter, the azimuth frequency modulation rate Ka, in the scenario of curved orbit. With the application of orbital state vectors, deramping-based approach is modified in order to accommodate the curved orbit in this paper.
The azimuth frequency modulation rate
Ka can be obtained as follows when SAR platform is in uniform linear motion:
In Equation (45), v is the velocity of the SAR platform, λ is the wavelength of carrier wave and r is the closest slant range.
In the scenario of curved orbit,
Ka cannot be acquired with Equation (45). So as to solve this problem, orbital state vectors are introduced to the azimuth frequency modulation rate
Ka in the scenario of curved orbit. The
Ka can be acquired with orbital state vectors as follows:
The R, V and A present relative position, velocity and acceleration 3-dimentional orbital state vectors between the radar and a target, respectively.
After
Ka has been acquired, azimuth deramping can be implemented to
s(
τ,
η) as follows:
The *
az denotes convolution operation in azimuth direction.
s(
τ,
η) is the echo data after demodulation to baseband.
The convolution in Equation (47) can be implemented in an another approach which contains a chirp multiplication of the azimuth signal
h1(
η), a subsequent FT operation and a residual phase
h2(
η′) multiplication. In other words, the alternate way for azimuth convolution in Equation (47) can be expressed by Equation (48) as follows:
where the FFTa(•) denotes azimuth fast Fourier transform operation. Two quadratic phase signals,
h1(
η) and
h2(
η′), are defined in Equations (49) and (50) as follows:
In Equations (49) and (50), the
η and
η′ are defined in Equations (51) and (52) as follows:
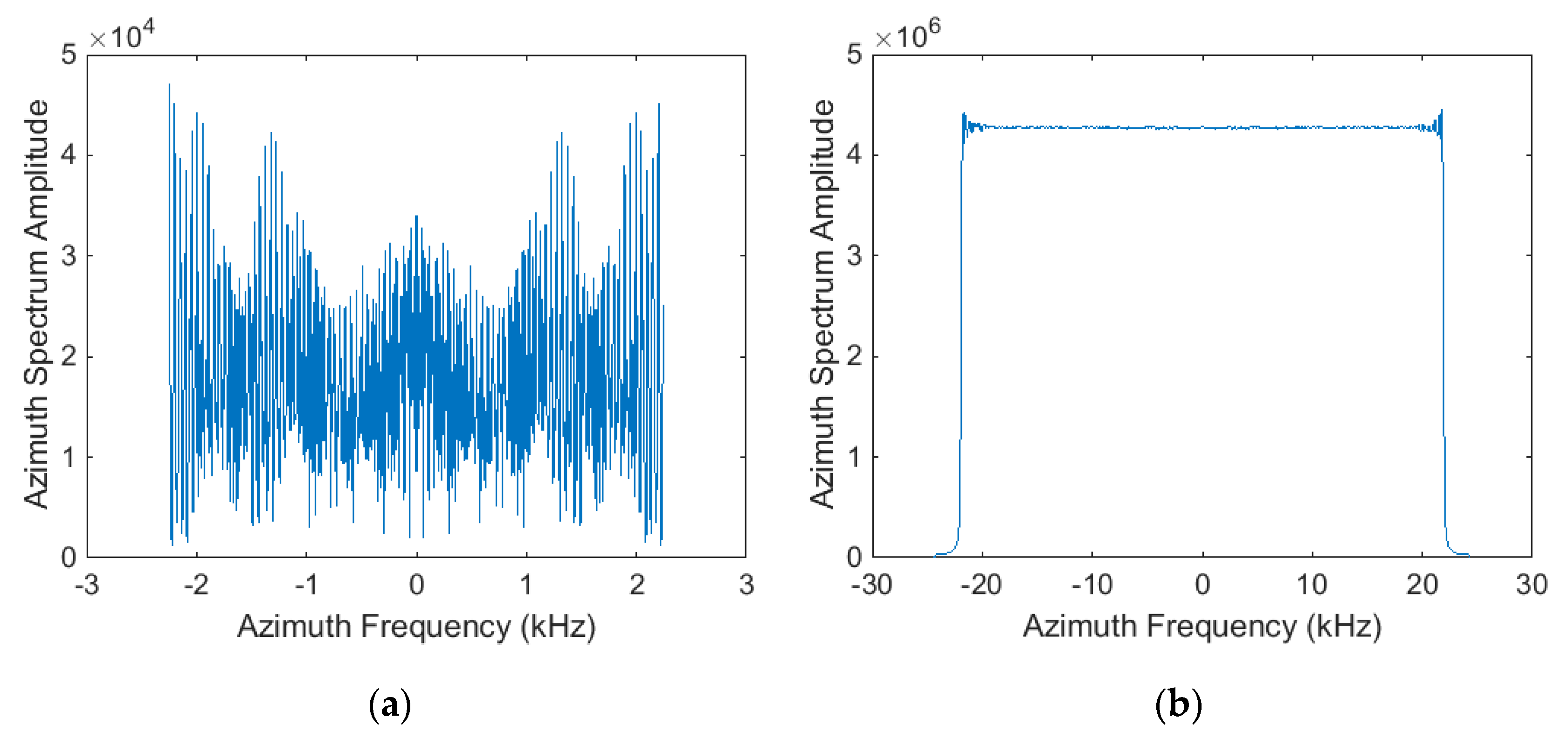
As P > Na, a zero padding operation of s(τ,η) in azimuth direction is required. As the η′ is determined by PRF, Ka and P, the P can be chosen according to the requirement of η′. In addition, the P can also be selected depending on the efficient implementation of FFT codes. Through application of modified deramping-based approach, azimuth spectral aliasing problem is solved.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}