Risk-Based Decision Methods for Vehicular Networks


Abstract
1. Introduction
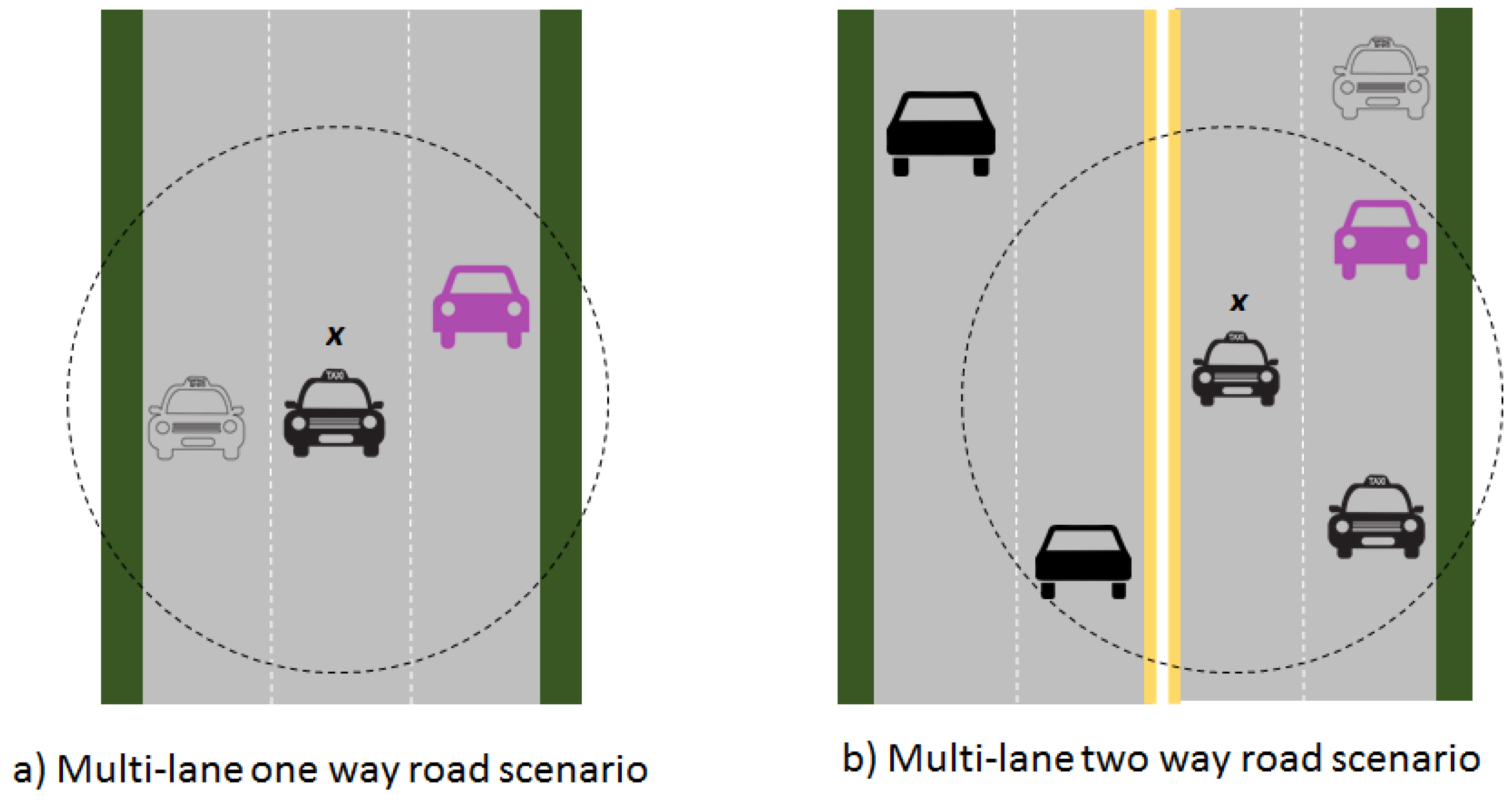
- In the earlier version, only four cases (car in front, car in rear, car on left and car on right) were considered for determining the risk from the perspective of traffic or congestion. In that model, only one case can be true at one time. This is a very simple approach. In reality, the vehicle is generally surrounded by multiple vehicles. In the extended version, we incorporated a mechanism which deals with the number of various vehicles in the surroundings (see Section 3.1).
- In the earlier version, only two cases (accelerating and decelerating) were considered for determining the risk from the perspective of speed. In many situations, the vehicle moves at a constant speed. For example, on highways, many drivers switch on the cruise control feature. In the extended version, we incorporated the case of constant speed (see Section 3.2).
- For the consistency and ease of implementation, the mapping functions of all six parameters of vehicle context is presented in the extended version (see Section 3.3).
- Vehicle context is determined based on six parameters: Lane, road, traffic, weather, speed and time. One weight value is associated with each parameter. However, the mechanism for determining the values of these weights was not presented in the earlier version. In this paper, we proposed a mechanism to calculate the weight values of the aforementioned six parameters of vehicle context (see Section 3.4).
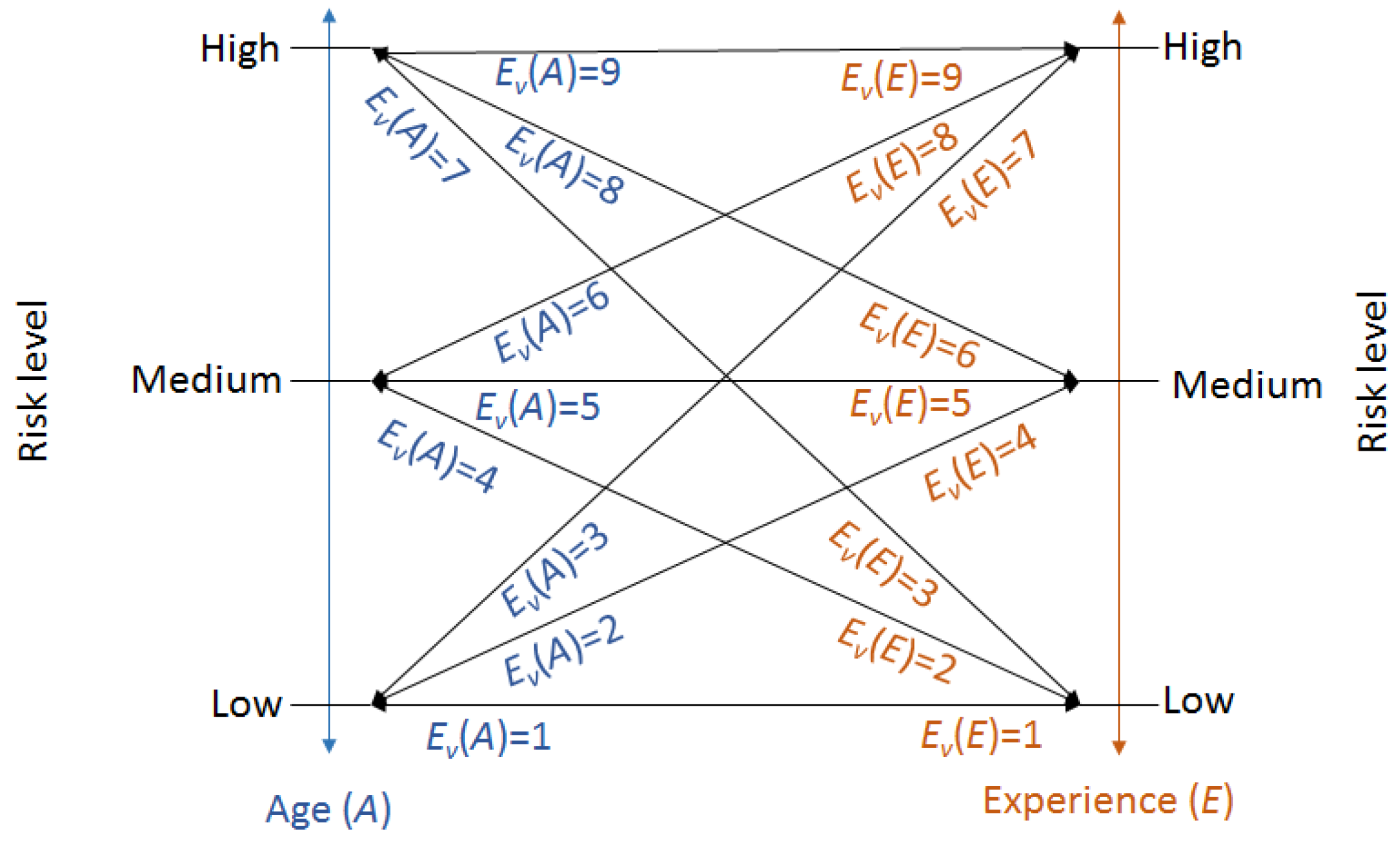
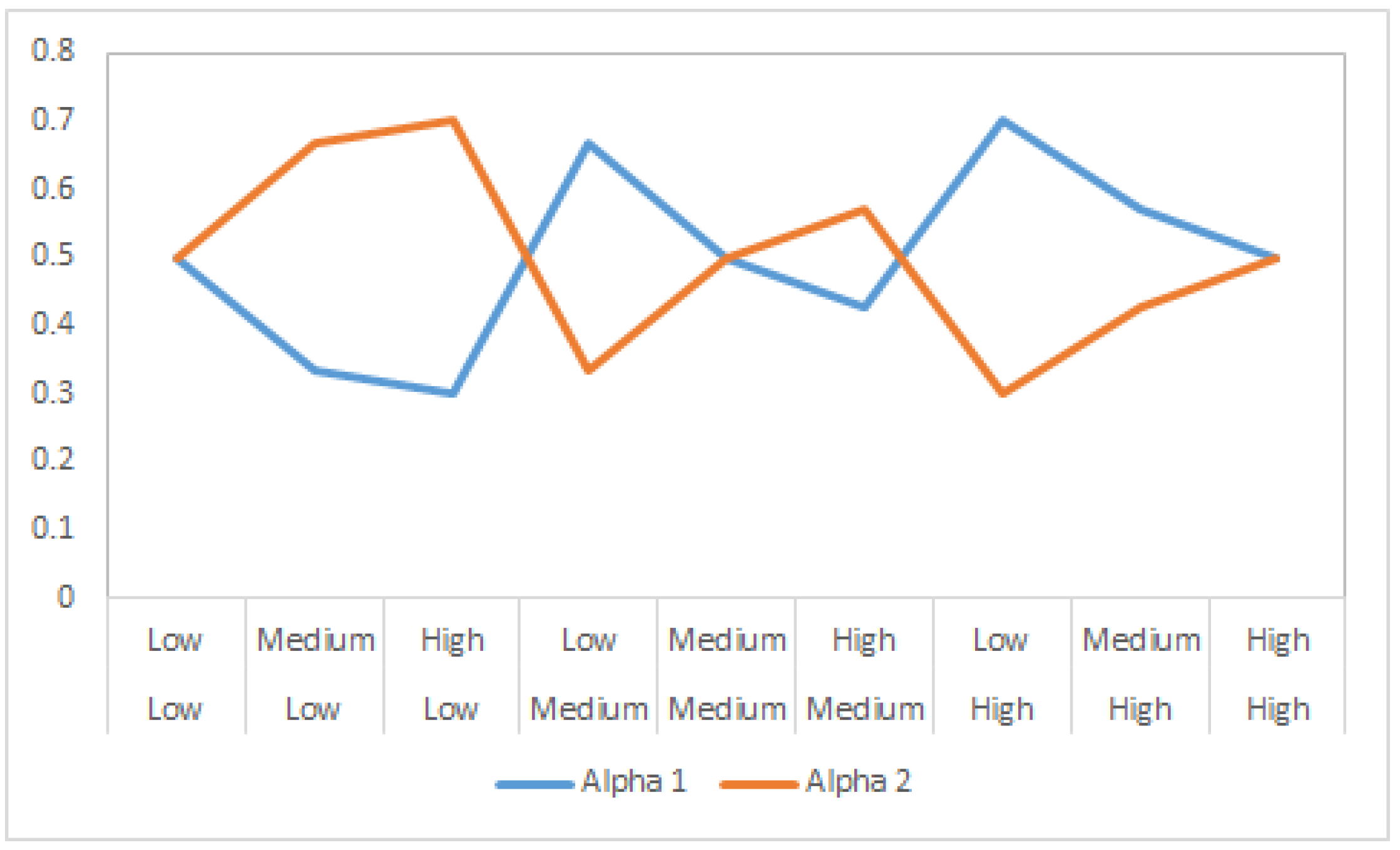
- Driver’s attitude is determined based on two factors: Age and experience. One weight value is associated with both the parameters. However, the mechanism for determining the values of these weights was also not present in the earlier version. In this paper, we proposed a mechanism to calculate the weight values of both the parameters of the driver’s attitude (see Section 3.6).
- As mentioned earlier, threat likelihood is determined based on two factors: Vehicle context and driver’s attitude. The weight values are also associated with both the factors. In this paper, we also proposed a mechanism to calculate the weight values of both the factors (see Section 3.5).
- We have provided simulation-based analysis and evaluation of proposed risk model. The results show that the proposed risk model reduces communication overhead and travel duration. As a result, fuel consumption and electricity consumption will also be reduced, which will create a positive impact on the environment and makes the vehicles eco-friendly (see Section 5).
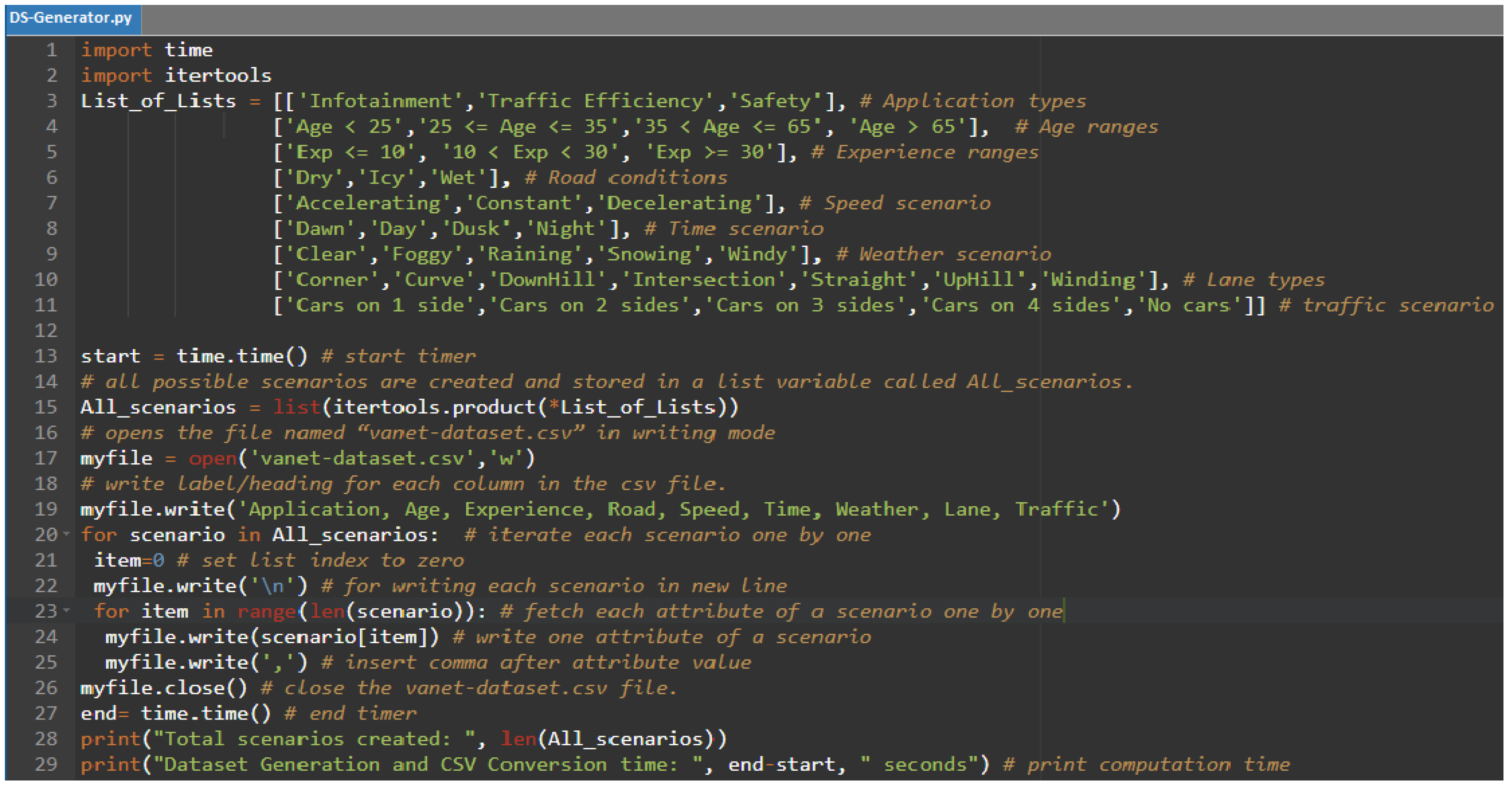
- Since simulation-based analysis and evaluation is limited in scope and does not cover all possible scenarios. Therefore, we have also conducted theoretical analysis and evaluation of the proposed method. The main problem that we faced during analysis and evaluation is the unavailability of the complete testing dataset. While some VANET datasets are available on public repositories such as TRCLC [13] provided by the Western Michigan University, those datasets do not contain various factors that we are using in our proposed model like road condition, lane type experience, etc. In order to overcome this problem, we created our own dataset generator program in python language. With the help of this program, we have created a large dataset, which contains 226,800 different scenarios.
- We have implemented the proposed model in the Python language. The program will analyze each scenario presented in the dataset and calculate risk based on the proposed method (see Section 6).
- For analytical cross-validation of the results, we have also presented mathematical proofs (see Section 4).
- Qualitative comparison of the proposed scheme is also presented in this work (see Section 7).
2. Fuzzy Risk-Based Decision Method
3. Proposed Extension
3.1. Improvement 1: Traffic ()
3.2. Improvement 2: Speed ()
3.3. Improvement 3: Mapping Functions Formation
3.4. Improvement 4: Weight Value Determination for Vehicle Contextual Parameters
3.5. Improvement 5: Weight Value Determination for Threat Likelihood Parameters
3.6. Improvement 6: Weight Value Determination for Driver’s Attitude Parameters
4. Theorems and Proofs
5. Simulation-Based Analysis and Evaluation
5.1. Simulation Setup and Assumptions
- Safety-related application scenario: For this scenario, we have implemented an accident notification application. The accident scenario is implemented by setting the speed of the vehicle to zero at a particular time. At the time of the accident, the vehicle will flood the “accident message”. The neighboring vehicles that received this message will change their route and relay this message to other vehicles. The message related to the same event will only be relayed once.
- Traffic efficiency related application scenario: For this scenario, we have implemented the traffic jam notification application. At the time of congestion, the vehicle will flood the “congestion message”. The neighboring vehicles that received this message will slow down and relay this message to other vehicles. Similar to the accident notification application, the message related to the same event will only be relayed once.
- Infotainment related application scenario: This is a simple scenario, in which vehicles share any random infotainment message to other vehicles. On the reception of infotainment message, the behavior of the vehicle and traffic will not be changed.
- In order to determine the time of the day, we have divided the simulation time into four portions: (1) 0–5 simulation time range is considered as “dawn”, (2) 5 to 25 time range is considered as “day”, (3) 25 to 30 time range is considered as “dusk”, and (4) 30 onwards is considered as “night”.
- Throughout the simulation, we have assumed clear weather.
- Driver Age and Experience are randomly assigned to each vehicle by keeping the following condition intact: Experience should always be less than Age.
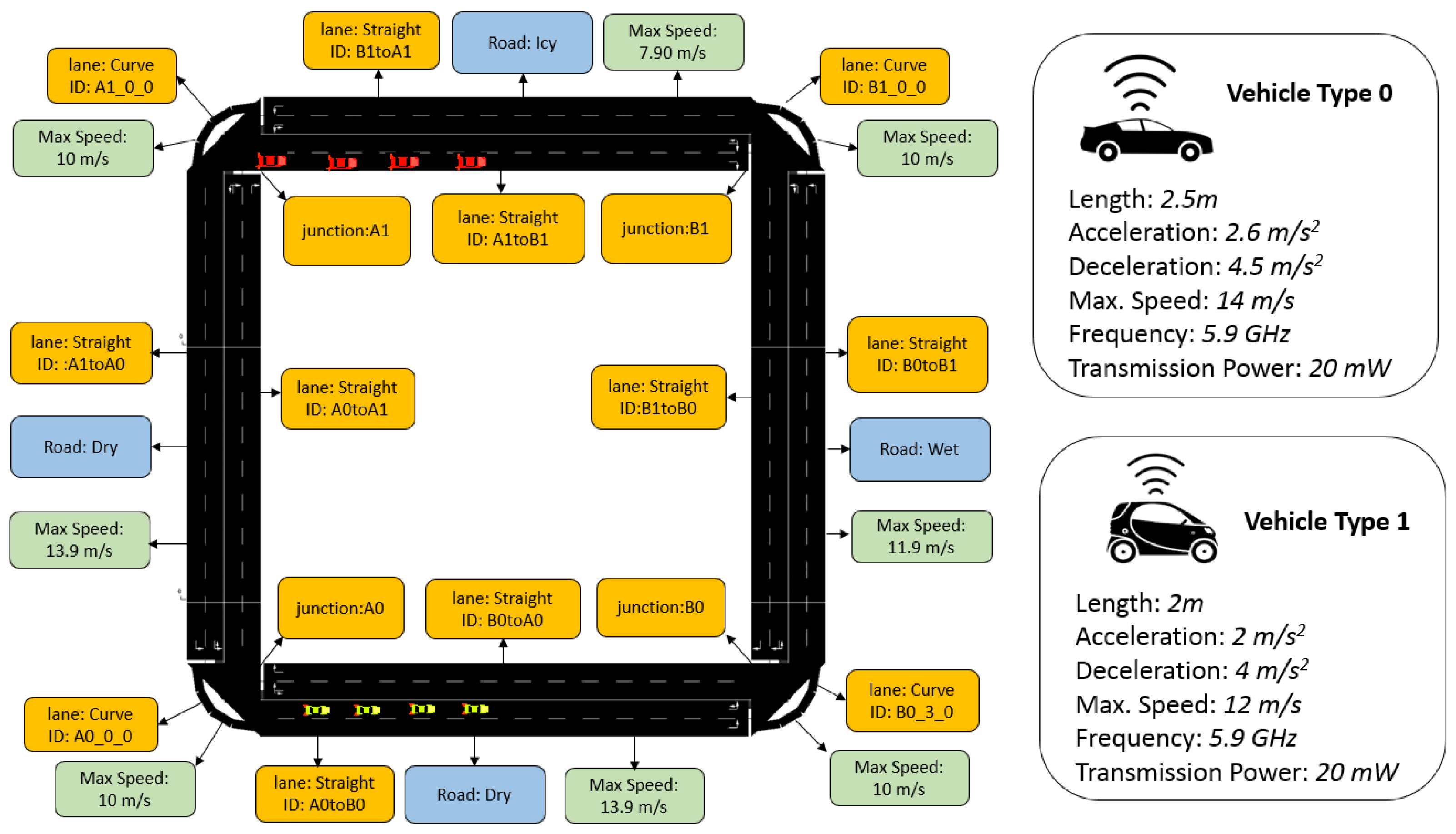
- Two types of vehicles are created in the simulation: (1) type 0 and (2) type 1. The length of type 0 vehicles is larger than the type 1 vehicles. Also, the speed of the type 0 is also higher than the type 1 vehicles.
- The following two traffic flows are generated:
- ,
- .
The first flow comprises of four type 0 vehicles and second flow comprises of four type 1 vehicles.
5.2. Results
6. Theoretical Analysis and Evaluation
6.1. Dataset Generation
6.2. Analysis and Evaluation
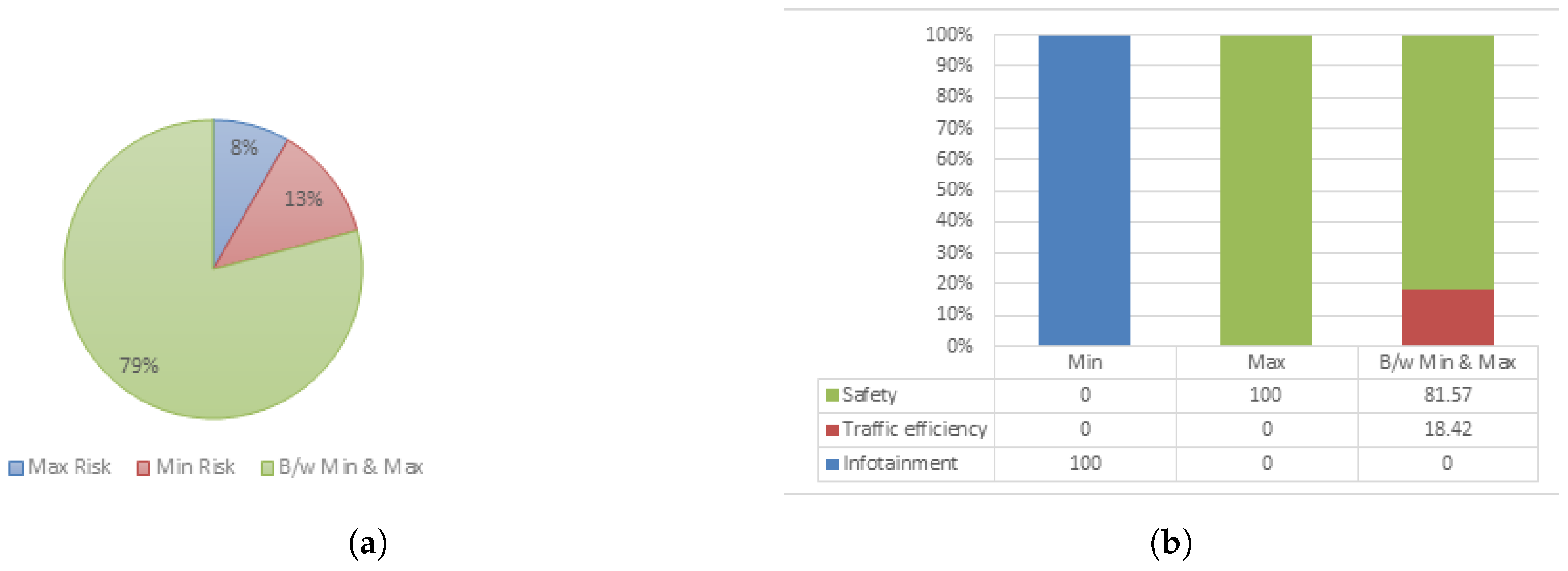
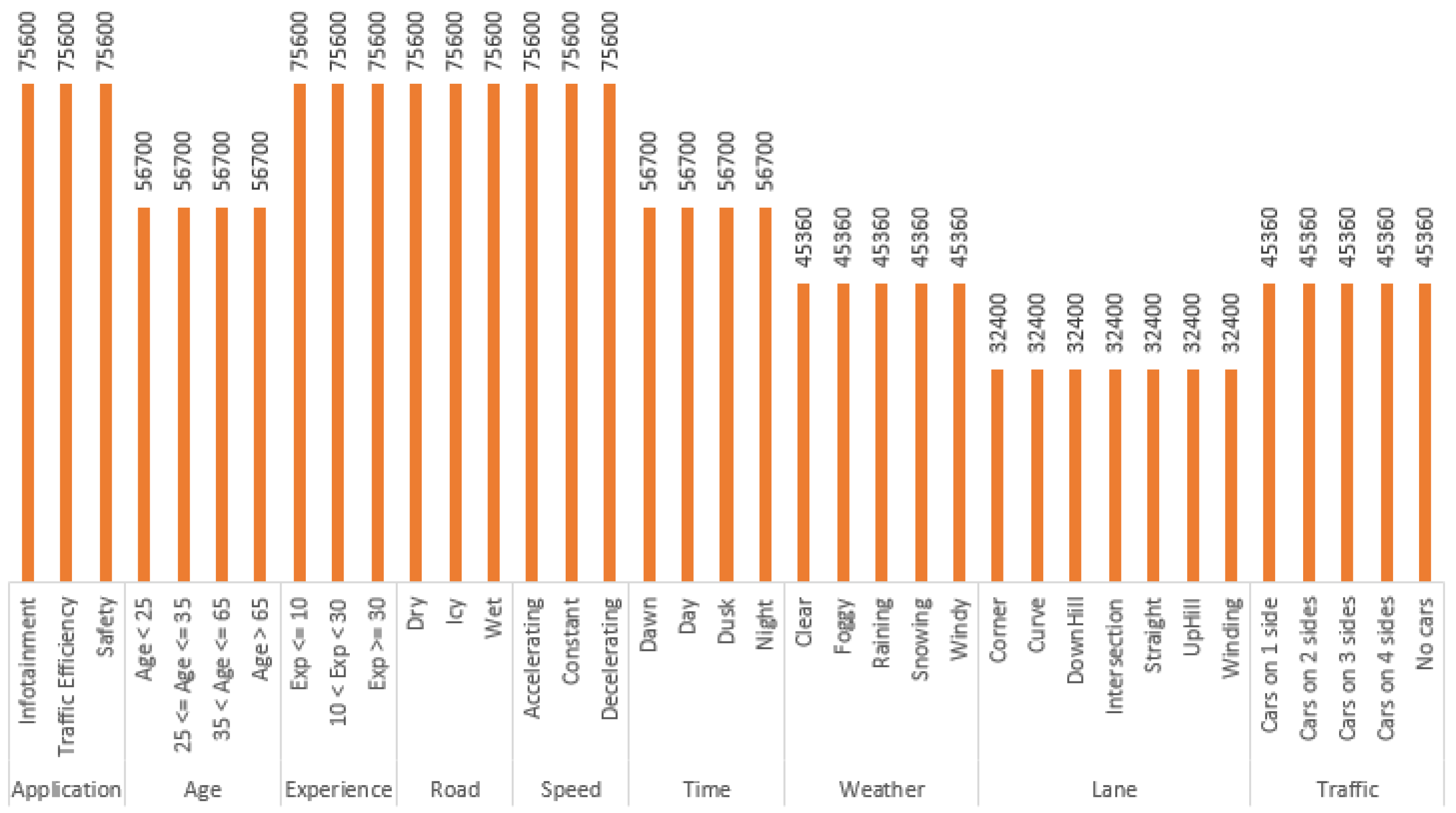
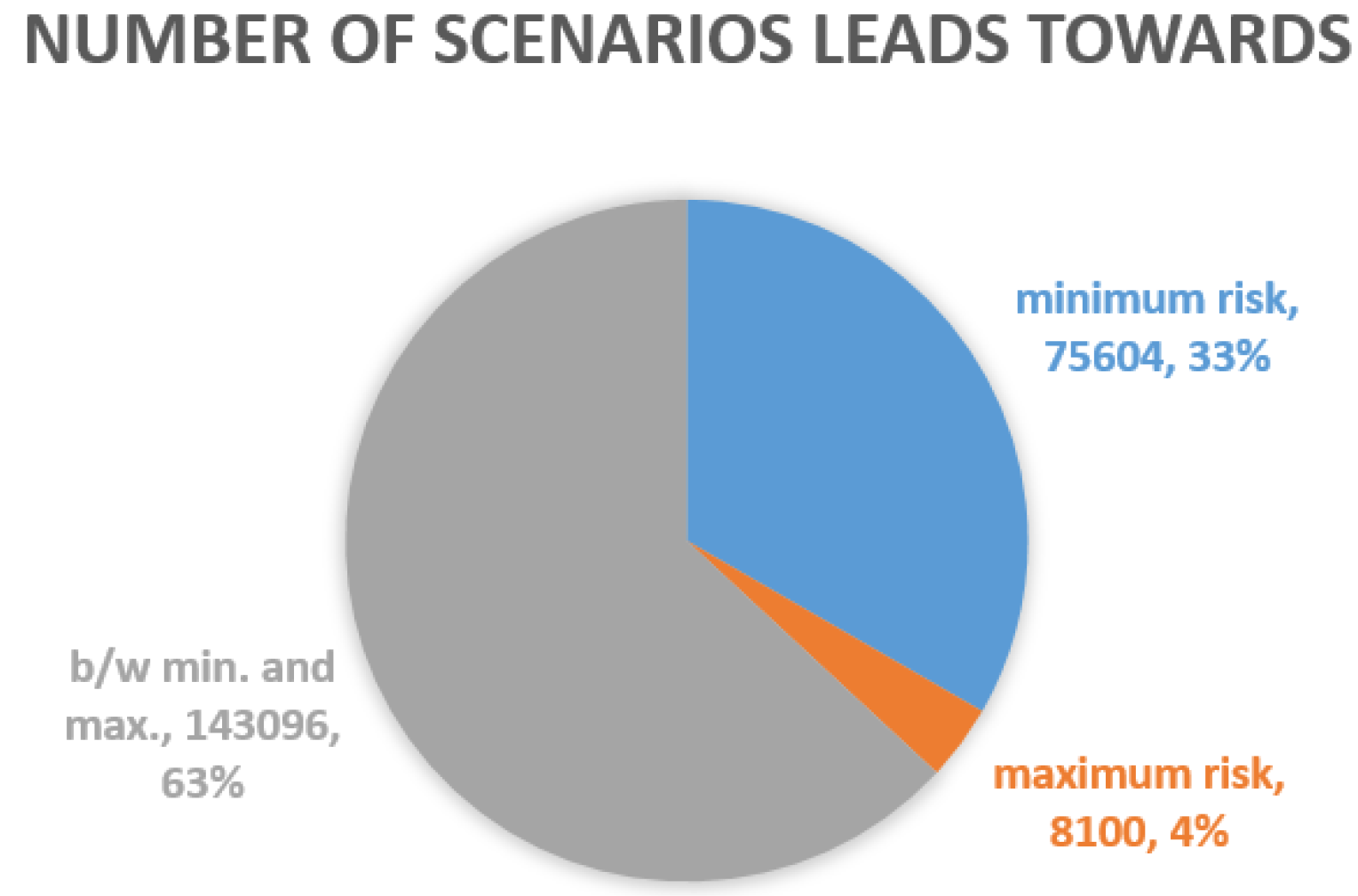
- 75,604 scenarios (33.33%) lead towards minimum risk (zero). This looks high at first glance. However, this is due to the fact that most of those scenarios are assuming infotainment application, which we have categorized as low impact application as discussed in Section 2. As shown in Figure 12, 75,600 scenarios assumed infotainment application. So, all those scenarios lead towards minimum risk. For other scenarios (which are either assuming traffic efficiency related applications or safety-related applications), only four cases exist which lead towards minimum risk.
- 8100 scenarios (3.57%) lead towards maximum risk.
- 143,096 scenarios (63.09%) lead towards risk between minimum and maximum.
6.3. Time and Space Complexity Analysis
7. Related Work and Qualitative Comparison
7.1. Related Work
7.2. Qualitative Comparison
- Environmental factors: Road, lane, weather, time, traffic, etc.
- Vehicle factors: Speed, model, length, etc.
- Driver factors: Age, experience, gender, emotions, etc.
- Application specific factors: Type, sensitivity level, event messages, etc.
8. Future Research Issues and Challenges
9. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proofs
References
- Ahmad, F.; Franqueira, V.N.; Adnane, A. TEAM: A trust evaluation and management framework in context-enabled vehicular ad-hoc networks. IEEE Access 2018, 6, 28643–28660. [Google Scholar] [CrossRef]
- Shaikh, R.A.; Alzahrani, A.S. Intrusion-aware trust model for vehicular ad hoc networks. Secur. Commun. Netw. 2014, 7, 1652–1669. [Google Scholar] [CrossRef]
- Kong, H.; Kim, T.; Hong, M. A Security Risk Assessment Framework for Smart Car. In Proceedings of the 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Fukoaka, Japan, 6–8 July 2016; pp. 102–108. [Google Scholar] [CrossRef]
- Hill, C.J.; Garrett, J.K. AASHTO Connected Vehicle Infrastructure Deployment Analysis, FHWA-JPO-11-090; Technical Report; American Association of State Highway and Transportation Officials AASHTO: Washington, DC, USA, 2011. [Google Scholar]
- Shaikh, R.A.; Alzahrani, A.S. Trust Management Method for Vehicular Ad Hoc Networks. In Quality, Reliability, Security and Robustness in Heterogeneous Networks; Singh, K., Awasthi, A.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 801–815. [Google Scholar]
- Beltz, B. Car Accidents Statistics. Available online: https://safer-america.com/car-accident-statistics/ (accessed on 6 March 2019).
- Zhao, H.; Mao, T.; Yu, H.; Zhang, M.K.; Zhu, H. A Driving Risk Prediction Algorithm Based on PCA -BP Neural Network in Vehicular Communication. In Proceedings of the 10th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 25–26 August 2018; pp. 164–169. [Google Scholar] [CrossRef]
- Chen, C.; Liu, X.; Chen, H.; Li, M.; Zhao, L. A Rear-End Collision Risk Evaluation and Control Scheme Using a Bayesian Network Model. IEEE Trans. Intell. Transp. Syst. 2019, 20, 264–284. [Google Scholar] [CrossRef]
- Sun, M.; Li, M.; Gerdes, R. Truth-aware Optimal Decision-making Framework with Driver Preferences for V2V Communications. In Proceedings of the IEEE Conference on Communications and Network Security (CNS), Beijing, China, 30 May–1 June 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Thayananthan, V.; Shaikh, R.A. Contextual Risk-based Decision Modeling for Vehicular Networks. Int. J. Adv. Comput. Sci. Appl. 2016, 8, 1–9. [Google Scholar] [CrossRef]
- Fitzgerald, E.; Landfeldt, B. Increasing road traffic throughput through dynamic traffic accident risk mitigation. J. Transp. Technol. 2015, 5, 223–239. [Google Scholar] [CrossRef]
- Shaikh, R.A. Fuzzy Risk-based Decision Method for Vehicular Ad Hoc Networks. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 54–62. [Google Scholar] [CrossRef]
- Transportation Research Center for Livable Communities. Available online: https://wmich.edu/transportationcenter/trclc-14-8 (accessed on 15 May 2019).
- Stoneburner, G.; Goguen, A.Y.; Feringa, A. Risk Management Guide for Information Technology Systems, Sp 800-30; Technical Report; National Institute of Standards & Technology: Gaithersburg, MA, USA, 2002. [Google Scholar]
- OMNET Simulator. Available online: https://www.omnetpp.org/ (accessed on 19 February 2019).
- SUMO (Simulation of Urban Mobility) Simulator. Available online: http://sumo.sourceforge.net/ (accessed on 19 February 2019).
- VEINS Framework. Available online: http://veins.car2x.org/ (accessed on 19 February 2019).
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; p. 10. [Google Scholar] [CrossRef]
- McCall, J.C.; Trivedi, M.M. Driver Behavior and Situation Aware Brake Assistance for Intelligent Vehicles. Proc. IEEE 2007, 95, 374–387. [Google Scholar] [CrossRef]
- Glaser, S.; Vanholme, B.; Mammar, S.; Gruyer, D.; Nouvelière, L. Maneuver-based Trajectory Planning for Highly Autonomous Vehicles on Real Road with Traffic and Driver Interaction. IEEE Trans. Intell. Transp. Syst. 2010, 11, 589–606. [Google Scholar] [CrossRef]
- Noh, S.; An, K. Risk assessment for automatic lane change maneuvers on highways. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 247–254. [Google Scholar] [CrossRef]
- Chen, S.; Irissappane, A.A.; Zhang, J. POMDP-Based Decision Making for Fast Event Handling in VANETs. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; pp. 4646–4653. [Google Scholar]
- Schneider, J.; Wilde, A.; Naab, K. Probabilistic approach for modeling and identifying driving situations. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 343–348. [Google Scholar] [CrossRef]
- Fitzgerald, E.; Landfeldt, B. A system for coupled road traffic utility maximisation and risk management using VANET. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1880–1887. [Google Scholar] [CrossRef]
- Fitzgerald, E.; Landfeldt, B. On road network utility based on risk-aware link choice. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 991–997. [Google Scholar] [CrossRef]
- Gindele, T.; Brechtel, S.; Dillmann, R. A probabilistic model for estimating driver behaviors and vehicle trajectories in traffic environments. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1625–1631. [Google Scholar] [CrossRef]
- Niehaus, A.; Stengel, R.F. Probability-based decision making for automated highway driving. IEEE Trans. Veh. Technol. 1994, 43, 626–634. [Google Scholar] [CrossRef]
- Noh, S.; An, K.; Han, W. High-Level Data Fusion Based Probabilistic Situation Assessment for Highly Automated Driving. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1587–1594. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Gonzalez, C.; Garcia, R.; de Pedro, T. Lane-Change Fuzzy Control in Autonomous Vehicles for the Overtaking Maneuver. IEEE Trans. Intell. Transp. Syst. 2008, 9, 438–450. [Google Scholar] [CrossRef]
- Albeshri, A.; Thayananthan, V. Analytical Techniques for Decision Making on Information Security for Big Data Breaches. Int. J. Inf. Technol. Decis. Mak. 2018, 17, 527–545. [Google Scholar] [CrossRef]





| 0.45 | 0.45 |
| (a) b | (b) b |

| 0.45 | 0.45 |
| (a) b | (b) b |




| 0.45 | 0.45 |
| (a) b | (b) b |



| 0.45 | 0.45 |
| (a) b | (b) b |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lane | Weather | Time | Traffic | Road | Speed |
|---|---|---|---|---|---|
| () | () | () | () | () | () |
| Straight | Clear | Day | Car in | Dry | Accelerating |
| (L) | (L) | (L) | front (H) | (L) | (H) |
| Curve | Raining | Night | Car on | Wet | Decelerating |
| (H) | (M) | (H) | left (M) | (M) | (L) |
| Winding | Snowing | Dusk | Car on | Icy | |
| (M) | (H) | (M) | right (M) | (H) | |
| Uphill | Foggy | Dawn | Car in | ||
| (M) | (H) | (M) | rear (H) | ||
| Downhill | Windy | ||||
| (M) | (M) | ||||
| Intersection | |||||
| (H) | L = Low risk = 0 | ||||
| Corner | M= Medium risk = 1 | ||||
| (H) | H = High risk = 2 | ||||
| Age (A) | Experience (E) |
|---|---|
| 35 < Age ≤ 65 | Experience ≥ 30 |
| (Low risk = 0) | (Low risk = 0) |
| 25 ≤ Age ≤ 35 | 10 < Experience < 30 |
| (Medium risk = 1) | (Medium risk = 1) |
| Age < 25 or Age > 65 | Experience ≤ 10 |
| (High risk = 2) | (High risk = 2) |
| Cars in | Cars on | Cars on | Cars in | Risk |
|---|---|---|---|---|
| Front | Left | Eight | Rear | |
| Low | ||||
| ✓ | Low | |||
| ✓ | Low | |||
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | ✓ | High | |
| ✓ | Low | |||
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | ✓ | High | |
| ✓ | ✓ | Medium | ||
| ✓ | ✓ | ✓ | High | |
| ✓ | ✓ | ✓ | High | |
| ✓ | ✓ | ✓ | ✓ | High |
| Parameter | Total Values | Number of Values Mapped to | ||
|---|---|---|---|---|
| Low Risk | Medium Risk | High Risk | ||
| Lane () | 7 | 1 | 3 | 3 |
| Weather () | 5 | 1 | 2 | 2 |
| Time () | 4 | 1 | 2 | 1 |
| Traffic () | 16 | 5 | 6 | 5 |
| Road () | 3 | 1 | 1 | 1 |
| Speed () | 3 | 1 | 1 | 1 |
| Age | Experience | ||||
|---|---|---|---|---|---|
| Low | Low | 1 | 1 | 0.5 | 0.5 |
| Low | Medium | 2 | 4 | 0.333333 | 0.666667 |
| Low | High | 3 | 7 | 0.3 | 0.7 |
| Medium | Low | 4 | 2 | 0.666667 | 0.333333 |
| Medium | Medium | 5 | 5 | 0.5 | 0.5 |
| Medium | High | 6 | 8 | 0.428571 | 0.571429 |
| High | Low | 7 | 3 | 0.7 | 0.3 |
| High | Medium | 8 | 6 | 0.571429 | 0.428571 |
| High | High | 9 | 9 | 0.5 | 0.5 |
| Parameter | Value |
|---|---|
| Simulation time | 80 s |
| Number of cars | 8 |
| frequency | 5.9 GHz |
| Transmission power | 20 mW |
| Bandwidth | 10 MHz |
| Channel number | 3 |
| Road Id | Lane Id | Lane Position | App Type | Payload | |
|---|---|---|---|---|---|
| Datatype: | string | string | double | integer | string |
| length: | 6 bytes | 6 bytes | 4 bytes | 2 bytes | 200 bytes |
| No. | Application | Age | Experience | Road | Speed | Time | Weather | Lane | Traffic |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Infotainment | Age <25 | Exp <= 10 | Dry | Accelerating | Dawn | Clear | Corner | Cars on 1 side |
| 2 | Infotainment | Age <25 | Exp <= 10 | Dry | Accelerating | Dawn | Clear | Corner | Cars on 2 sides |
| 3 | Infotainment | Age <25 | Exp <= 10 | Dry | Accelerating | Dawn | Clear | Corner | Cars on 3 sides |
| 4 | Infotainment | Age <25 | Exp <= 10 | Dry | Accelerating | Dawn | Clear | Corner | Cars on 4 sides |
| 5 | Infotainment | Age <25 | Exp <= 10 | Dry | Accelerating | Dawn | Clear | Corner | No cars |
| - - snip - - | |||||||||
| 226,796 | Safety | Age >65 | Exp >= 30 | Wet | Decelerating | Night | Windy | Winding | Cars on 1 side |
| 226,797 | Safety | Age >65 | Exp >= 30 | Wet | Decelerating | Night | Windy | Winding | Cars on 2 sides |
| 226,798 | Safety | Age >65 | Exp >= 30 | Wet | Decelerating | Night | Windy | Winding | Cars on 3 sides |
| 226,799 | Safety | Age >65 | Exp >= 30 | Wet | Decelerating | Night | Windy | Winding | Cars on 4 sides |
| 226,800 | Safety | Age >65 | Exp >= 30 | Wet | Decelerating | Night | Windy | Winding | No cars |


| Addition | Subtraction | Multiplication | Min | Max | Equation No. | |
|---|---|---|---|---|---|---|
| Impact | 1 | 5 | 3 | 3 | 2 | |
| Risk | 1 | 11 | 2 | 3 | ||
| Total | 2 | 5 | 11 | 3 | 5 |
| Addition | Subtraction | Division | Multiplication | Min | Max | Equation No. | |
|---|---|---|---|---|---|---|---|
| Impact | 1 | 5 | 3 | 3 | 2 | ||
| Risk | 11 | 2 | 3 | ||||
| Common denominator for to | 5 | 6 | 10–15 | ||||
| 2 | 10 | ||||||
| 2 | 11 | ||||||
| 2 | 12 | ||||||
| 2 | 13 | ||||||
| 2 | 14 | ||||||
| 2 | 15 | ||||||
| 1 | 1 | 17 | |||||
| 1 | 18 | ||||||
| 1 | 1 | 19 | |||||
| 1 | 20 | ||||||
| Total | 8 | 7 | 20 | 11 | 3 | 5 |
| Reference | Methodology | Application Domain |
|---|---|---|
| [8] | Probabilistic model + Bayesian network | Supports single safety application scenario |
| [9] | Bayes rules + Dempster Shafer theory | Supports multiple application scenarios |
| [10] | Probabilistic model | Supports single safety application scenario |
| [11] | Simple average | Supports multiple application scenarios |
| [19] | Bayesian framework +probabilistic model | Supports multiple application scenarios |
| [20] | Trajectory-planning algorithm | Supports single traffic safety application |
| [21] | Probabilistic reasoning based on Bayesian networks | Supports single traffic safety application |
| [22] | Partially observable markov decision process (POMDP) with Bayesian theory | Supports multiple application scenarios |
| [23] | Bayesian network and fuzzy features | Support for multiple application scenarios |
| [24] | Risk mitigation with an algorithm using a weighted average of risk estimates | Supports single traffic efficiency application |
| [25] | Risk-aware link choice algorithm | Supports single traffic efficiency application |
| [26] | Probabilistic model and Bayesian network | Supports single traffic safety application |
| [27] | Probabilistic framework with stochastic function | Supports single traffic safety application |
| [28] | Probabilistic situation assessment method | Supports single traffic safety application |
| [29] | Fuzzy controllers and high-precision global positioning system | Supports single safety application scenario |
| Factors | ||||
|---|---|---|---|---|
| Environmental | Vehicle | Driver | Application | |
| Proposed Model | × | × | × | × |
| [8] | × | × | ||
| [9] | × | × | ||
| [10] | × | × | ||
| [11] | × | × | × | |
| [19] | × | × | ||
| [20] | × | × | ||
| [21] | × | × | ||
| [22] | × | × | ||
| [23] | × | |||
| [24] | × | × | × | |
| [25] | × | × | × | |
| [26] | × | |||
| [27] | × | × | ||
| [28] | × | × | ||
| [29] | × | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikh, R.A.; Thayananthan, V. Risk-Based Decision Methods for Vehicular Networks. Electronics 2019, 8, 627. https://doi.org/10.3390/electronics8060627
Shaikh RA, Thayananthan V. Risk-Based Decision Methods for Vehicular Networks. Electronics. 2019; 8(6):627. https://doi.org/10.3390/electronics8060627
Chicago/Turabian StyleShaikh, Riaz Ahmed, and Vijey Thayananthan. 2019. "Risk-Based Decision Methods for Vehicular Networks" Electronics 8, no. 6: 627. https://doi.org/10.3390/electronics8060627
APA StyleShaikh, R. A., & Thayananthan, V. (2019). Risk-Based Decision Methods for Vehicular Networks. Electronics, 8(6), 627. https://doi.org/10.3390/electronics8060627