Localization and Frequency Identification of Large-Range Wide-Band Electromagnetic Interference Sources in Electromagnetic Imaging System

Abstract
:1. Introduction
2. System Architecture
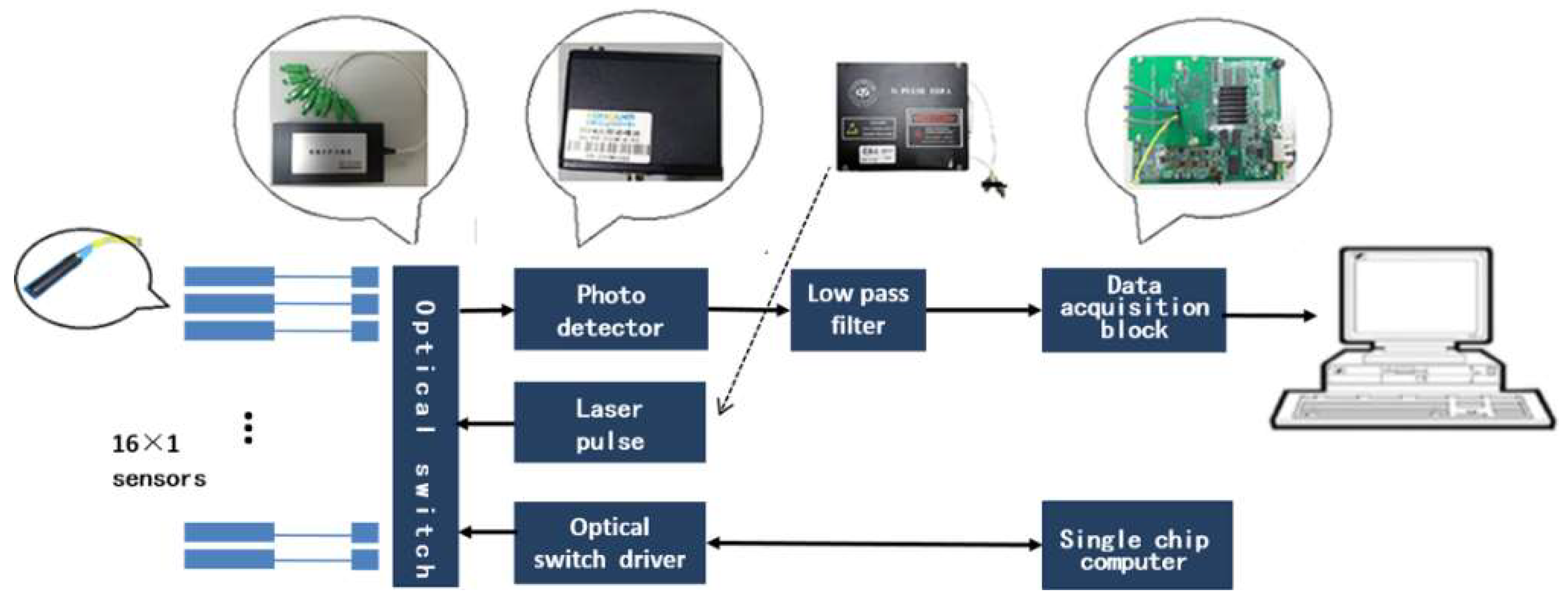
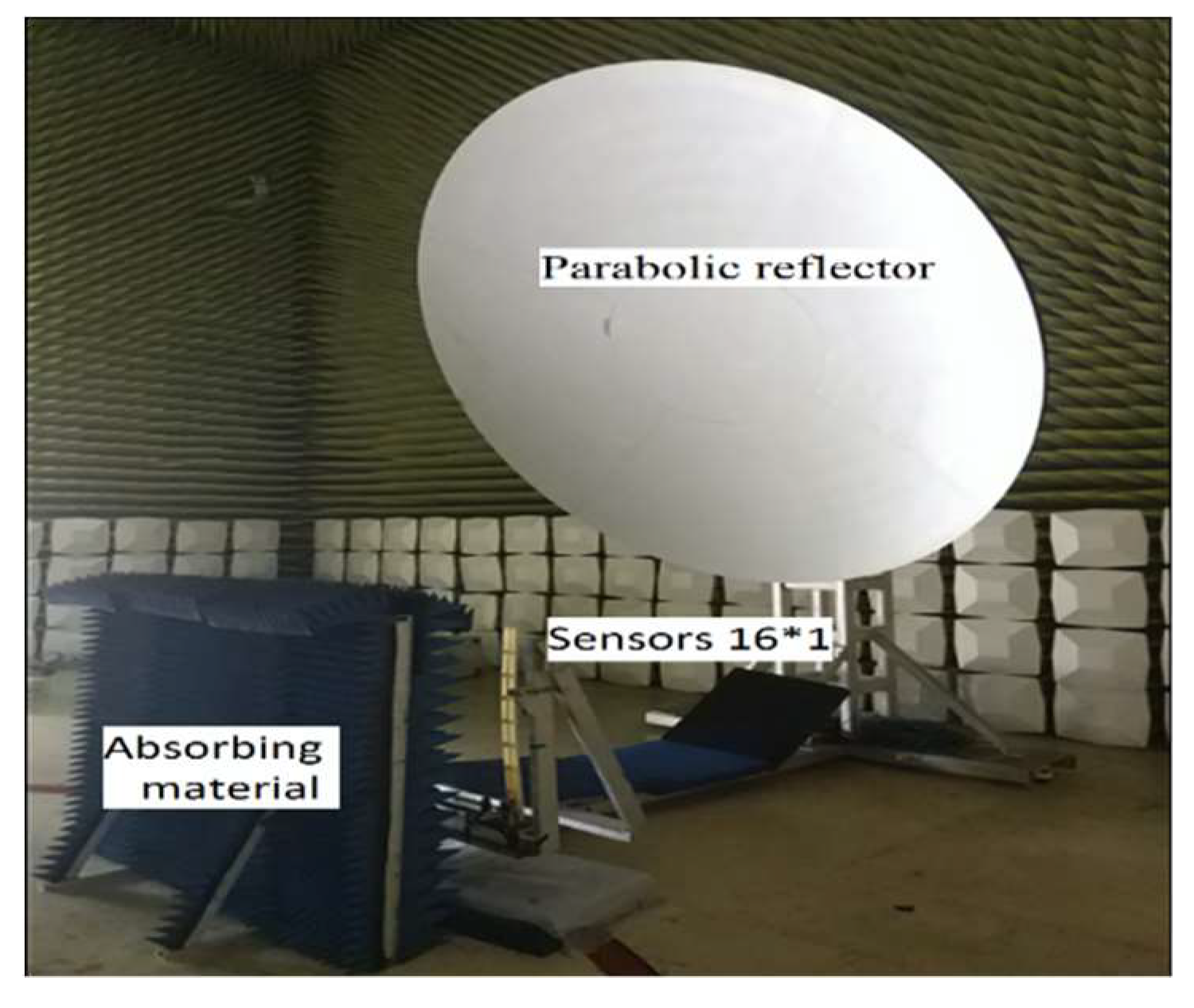
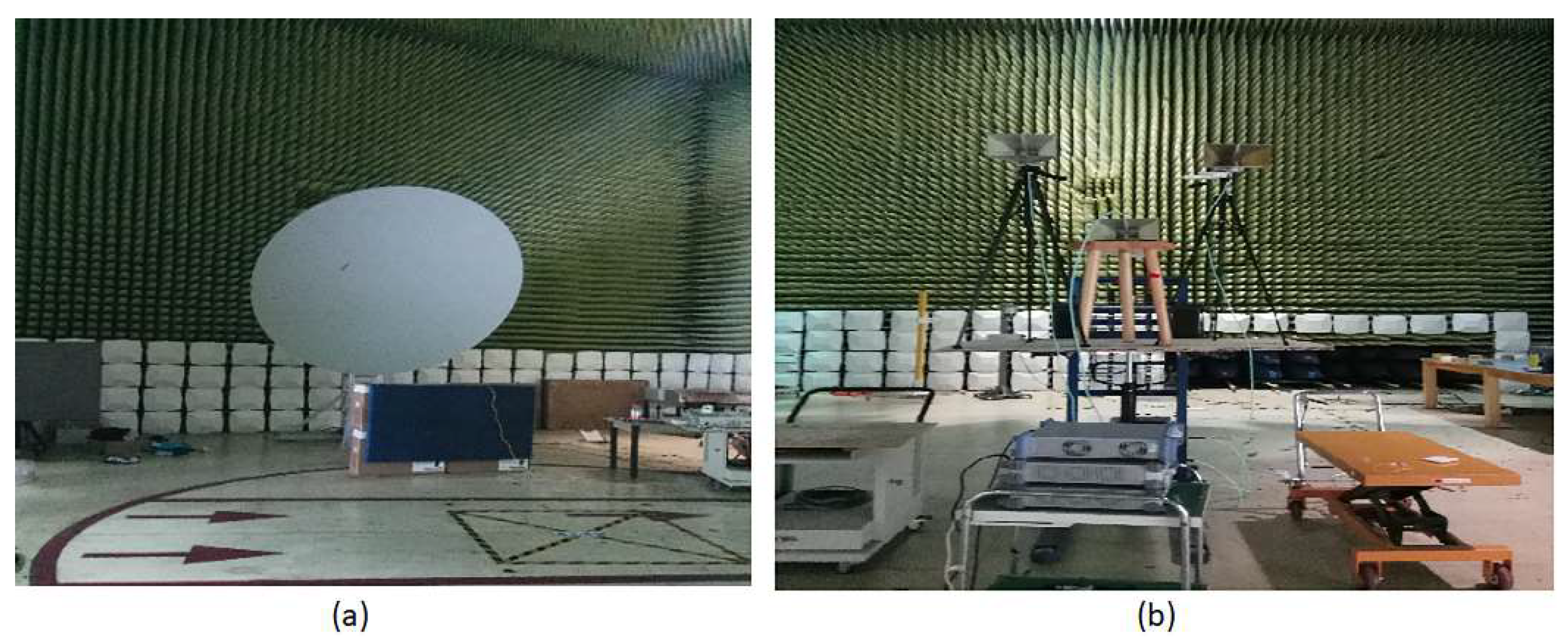
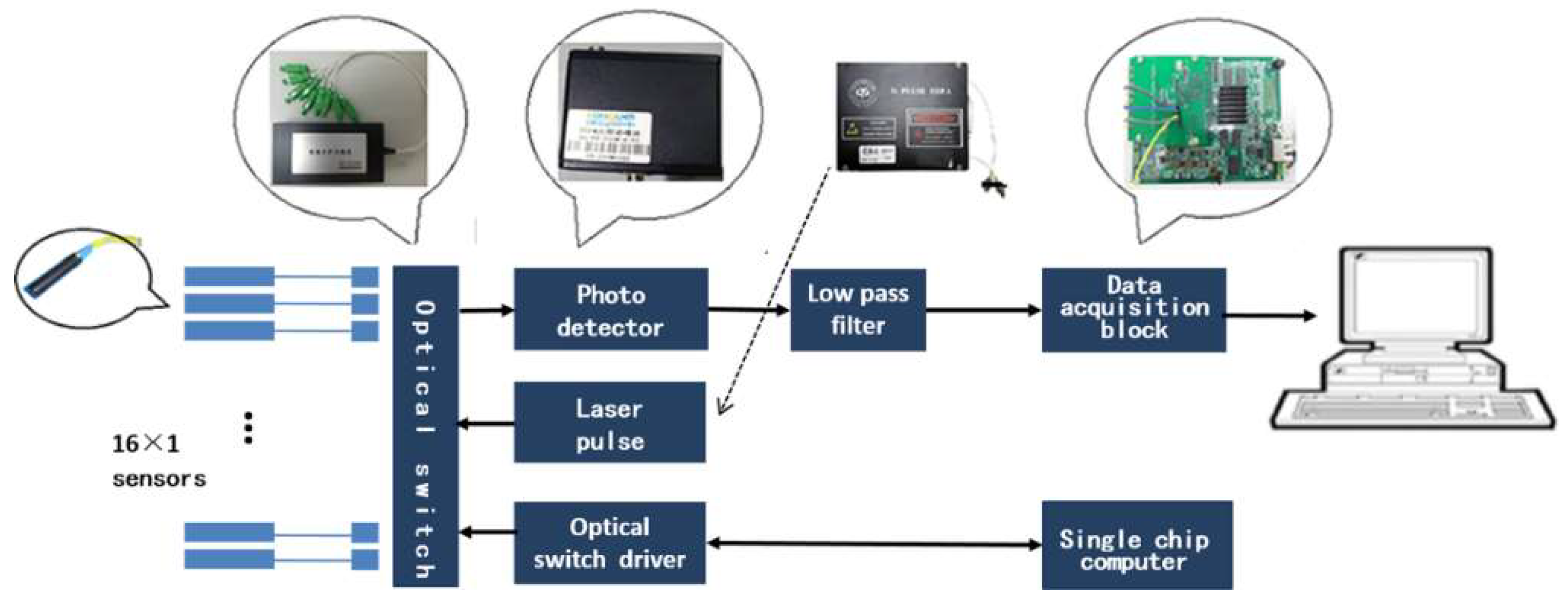
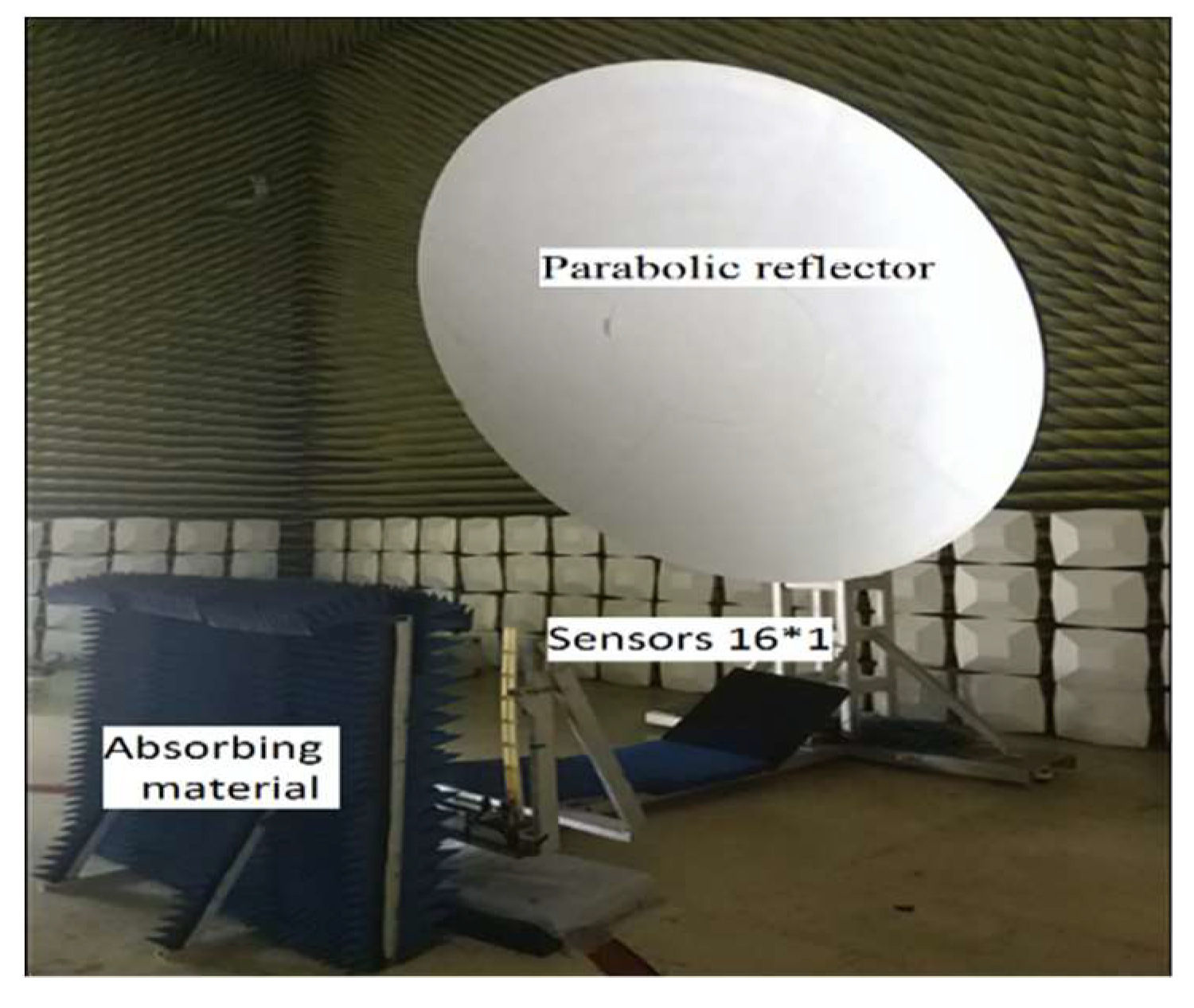
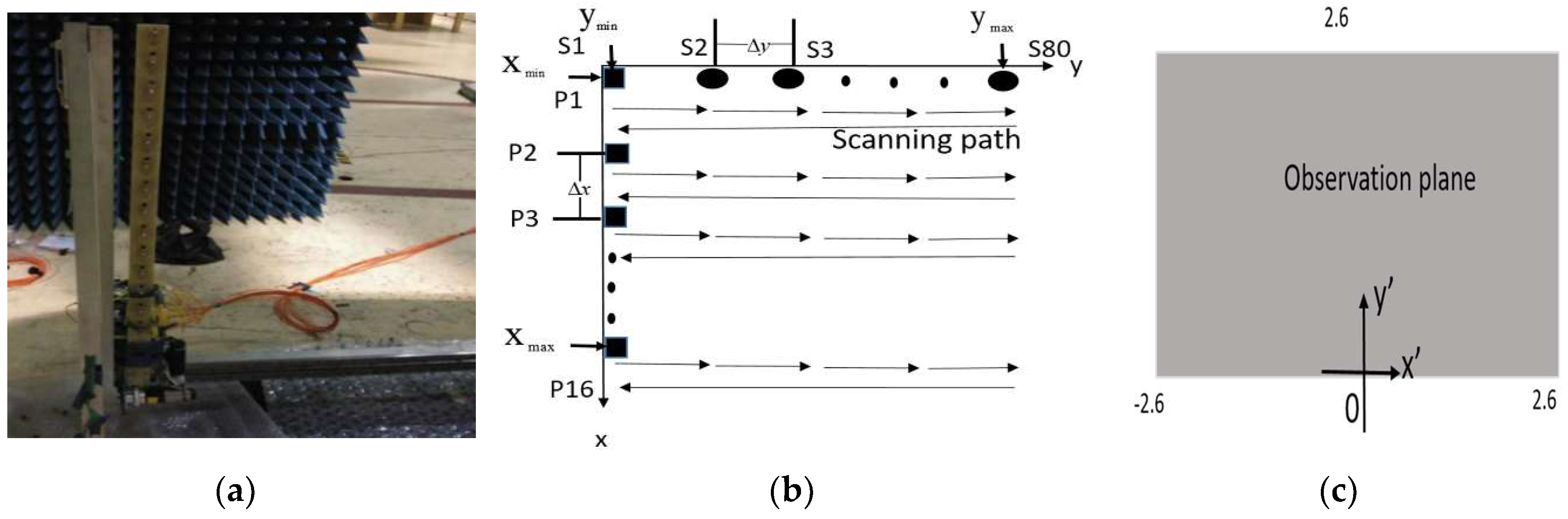
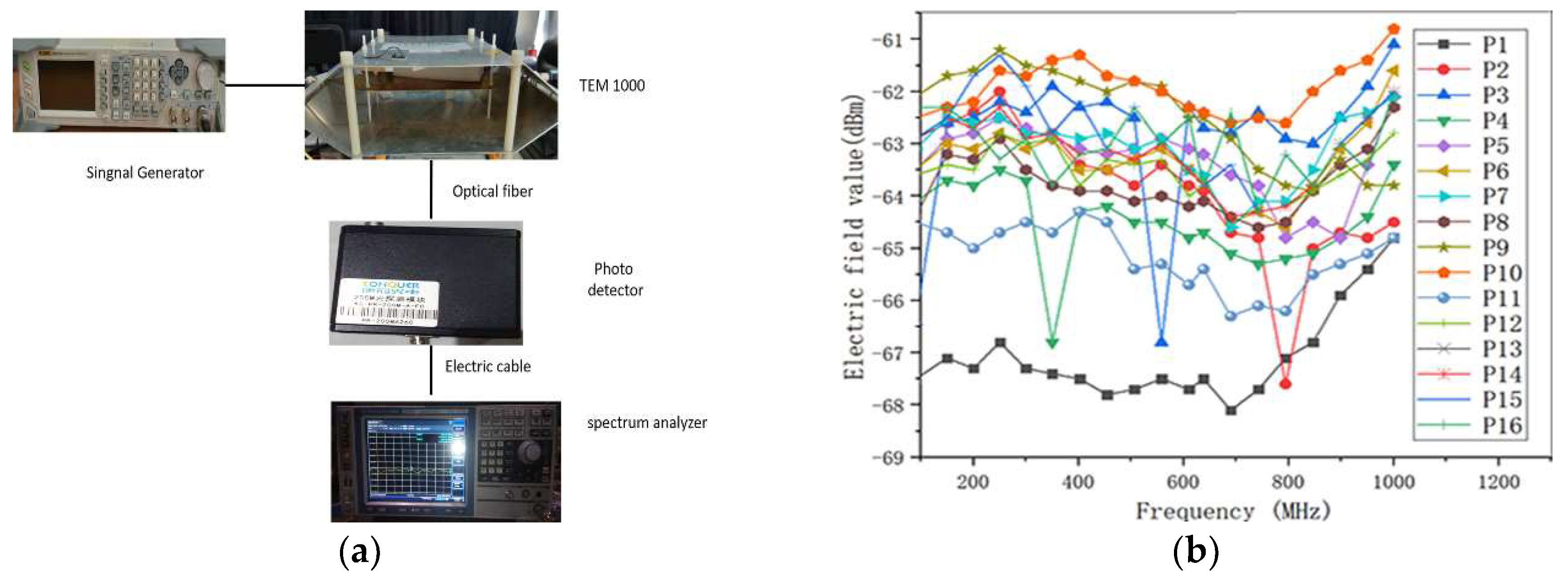
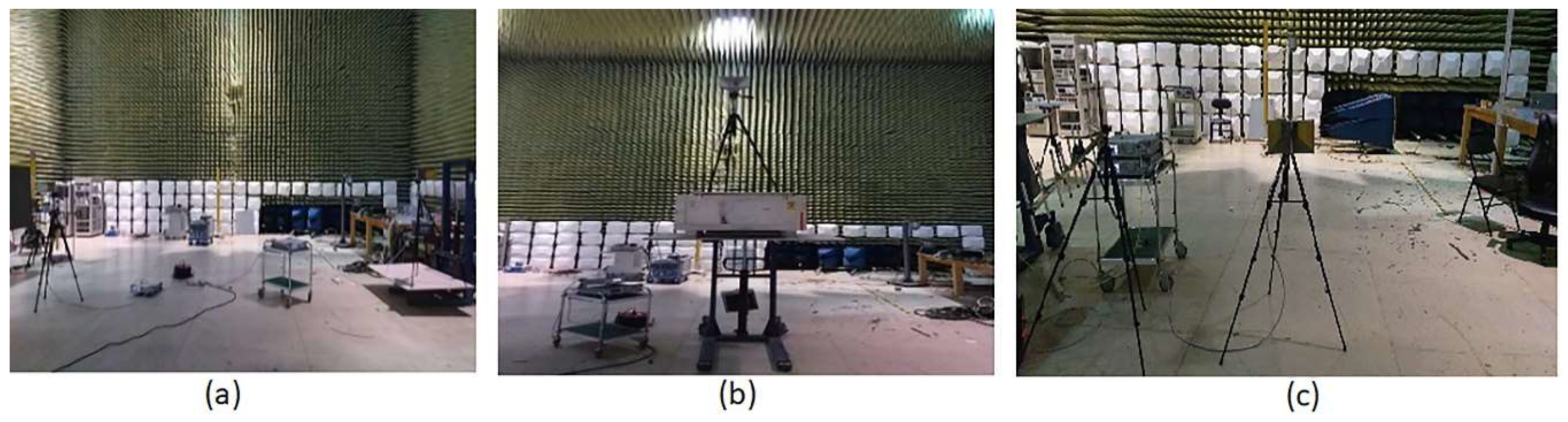
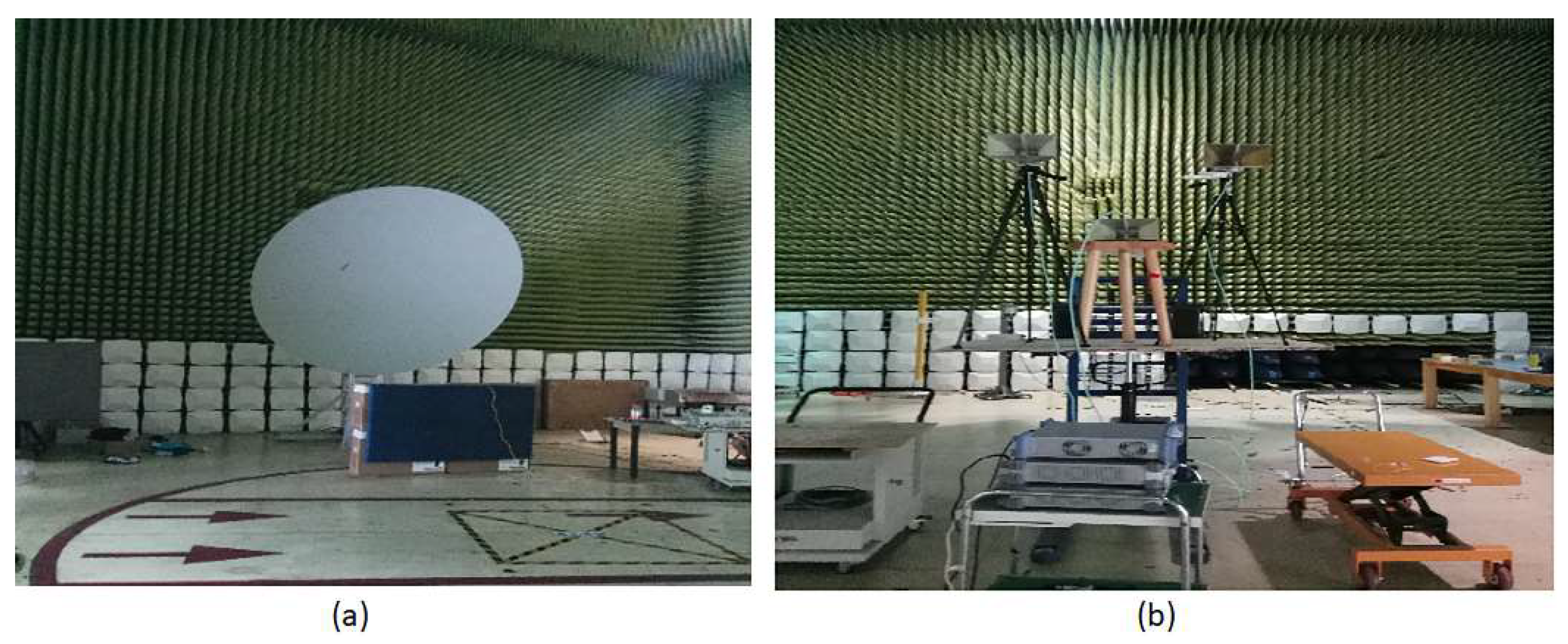
2.1. The Electromagnetic Imaging System
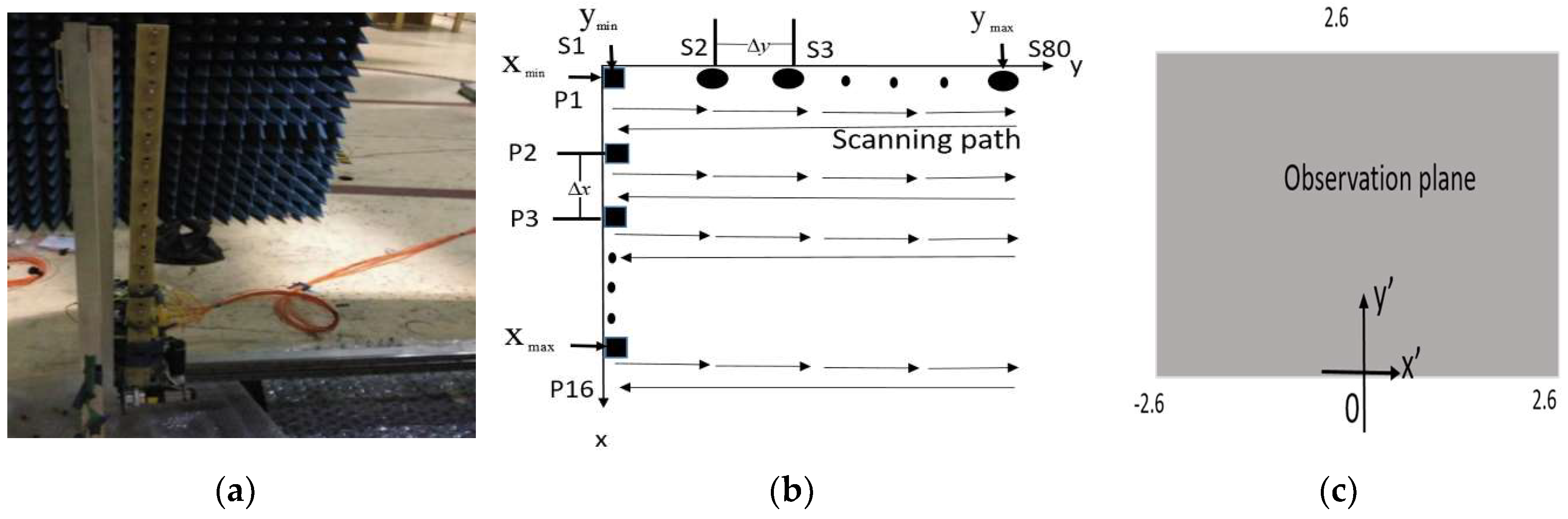
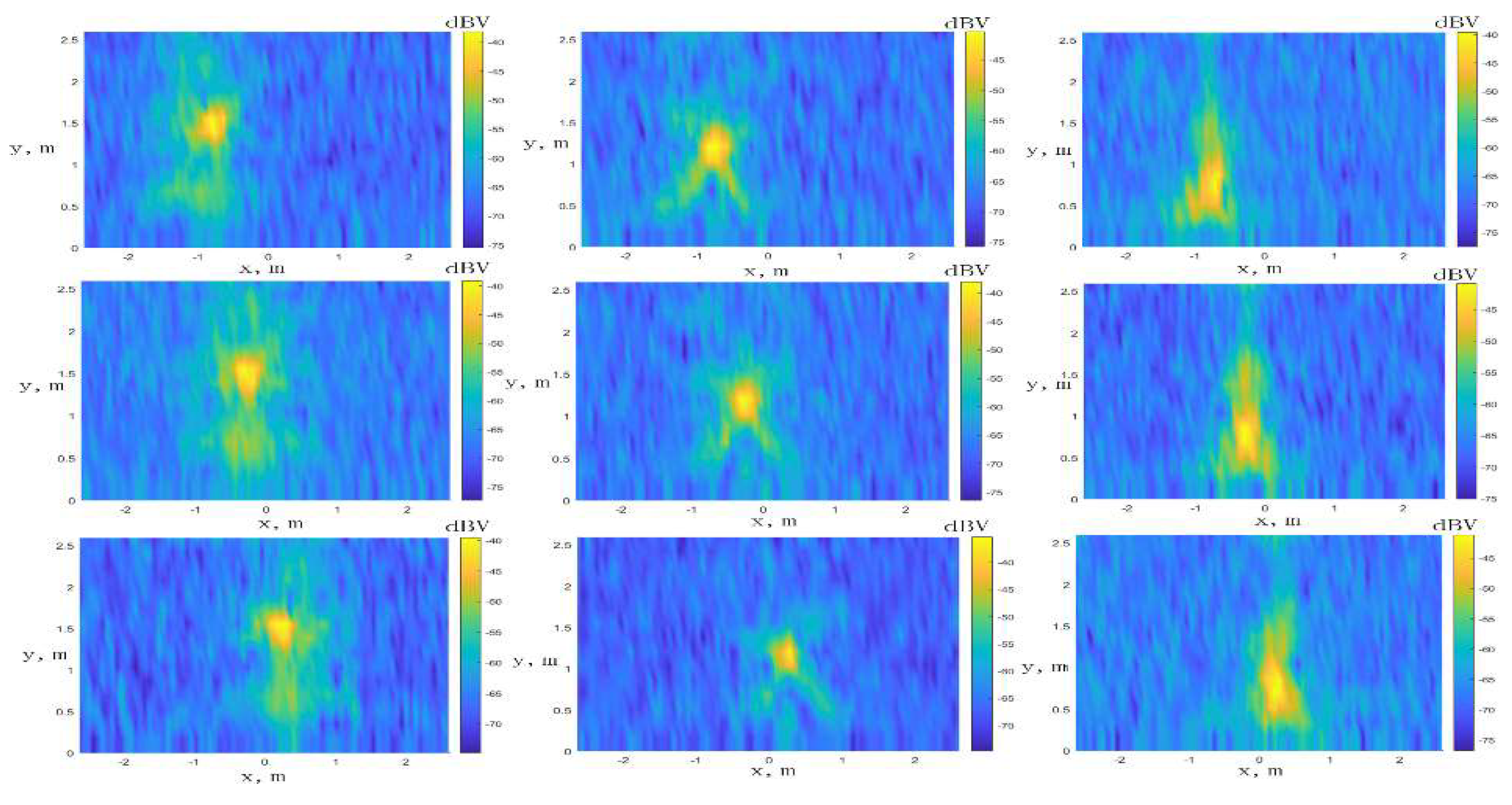
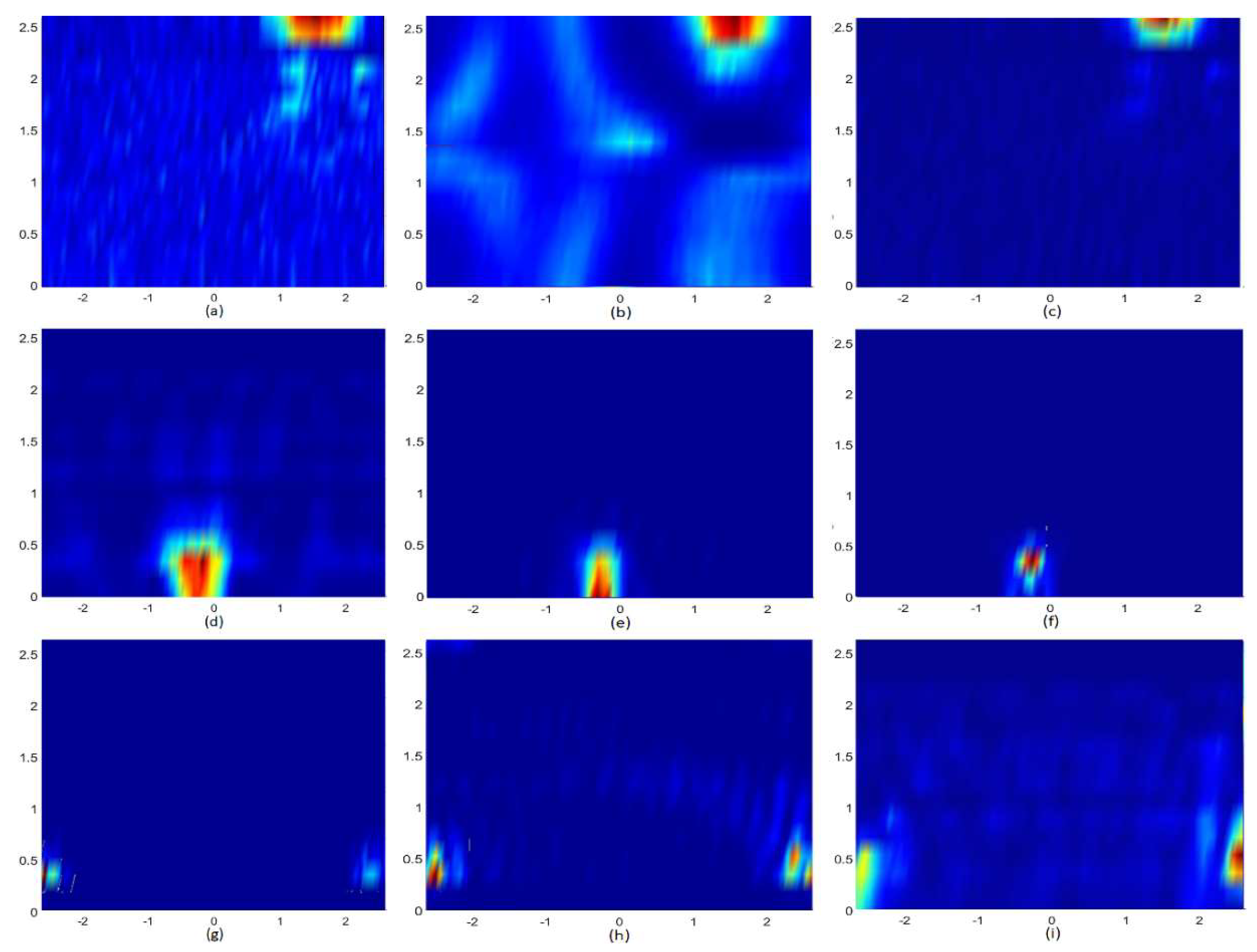
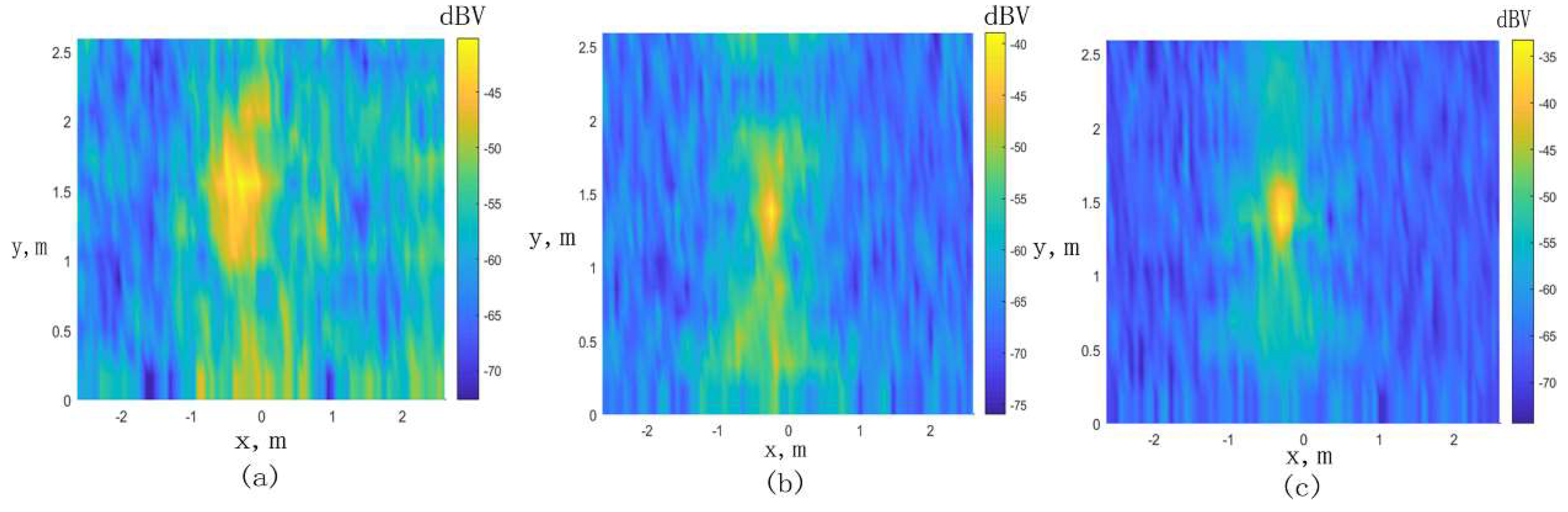
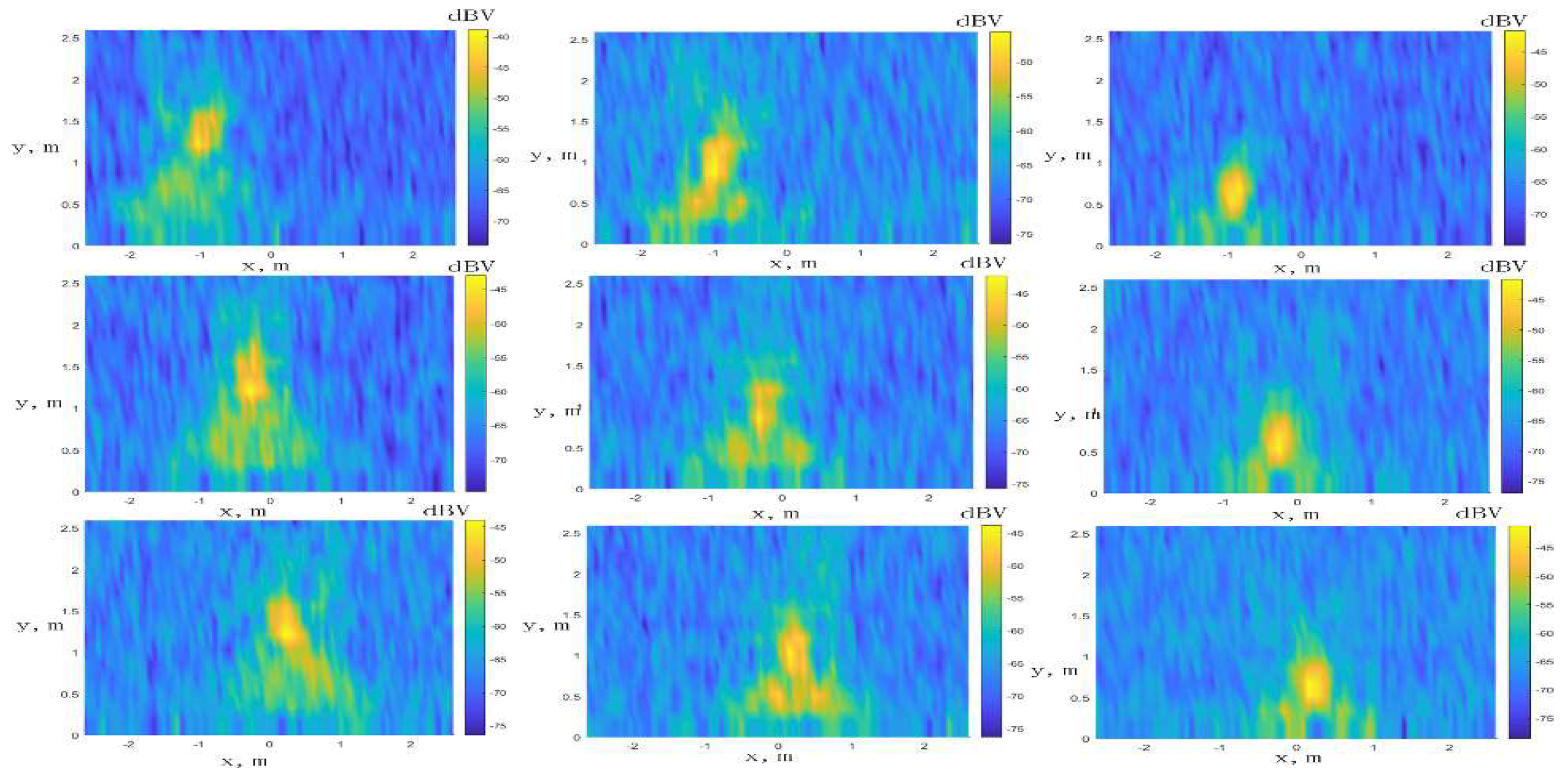
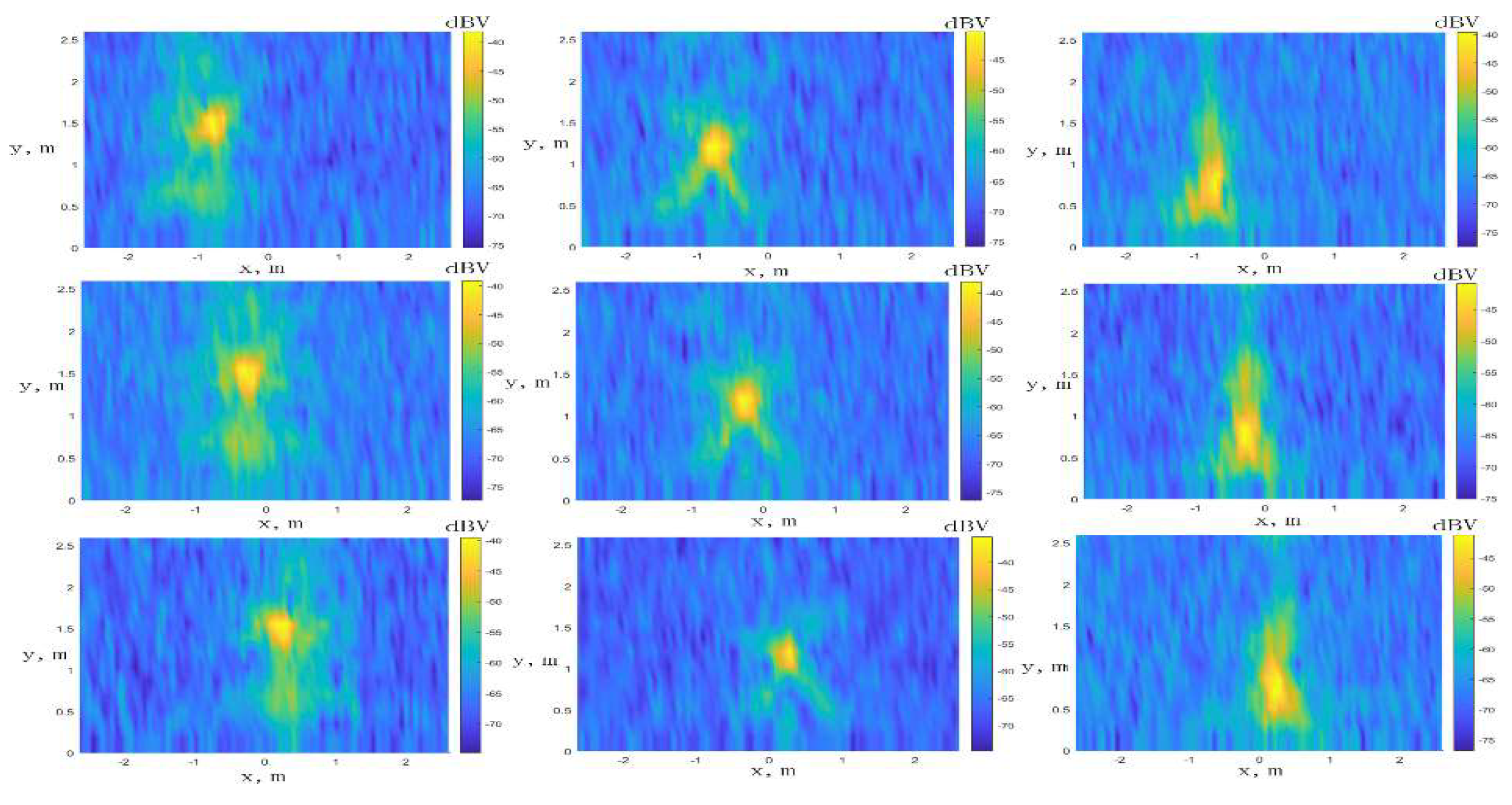
2.2. Large-Range EMI Imaging
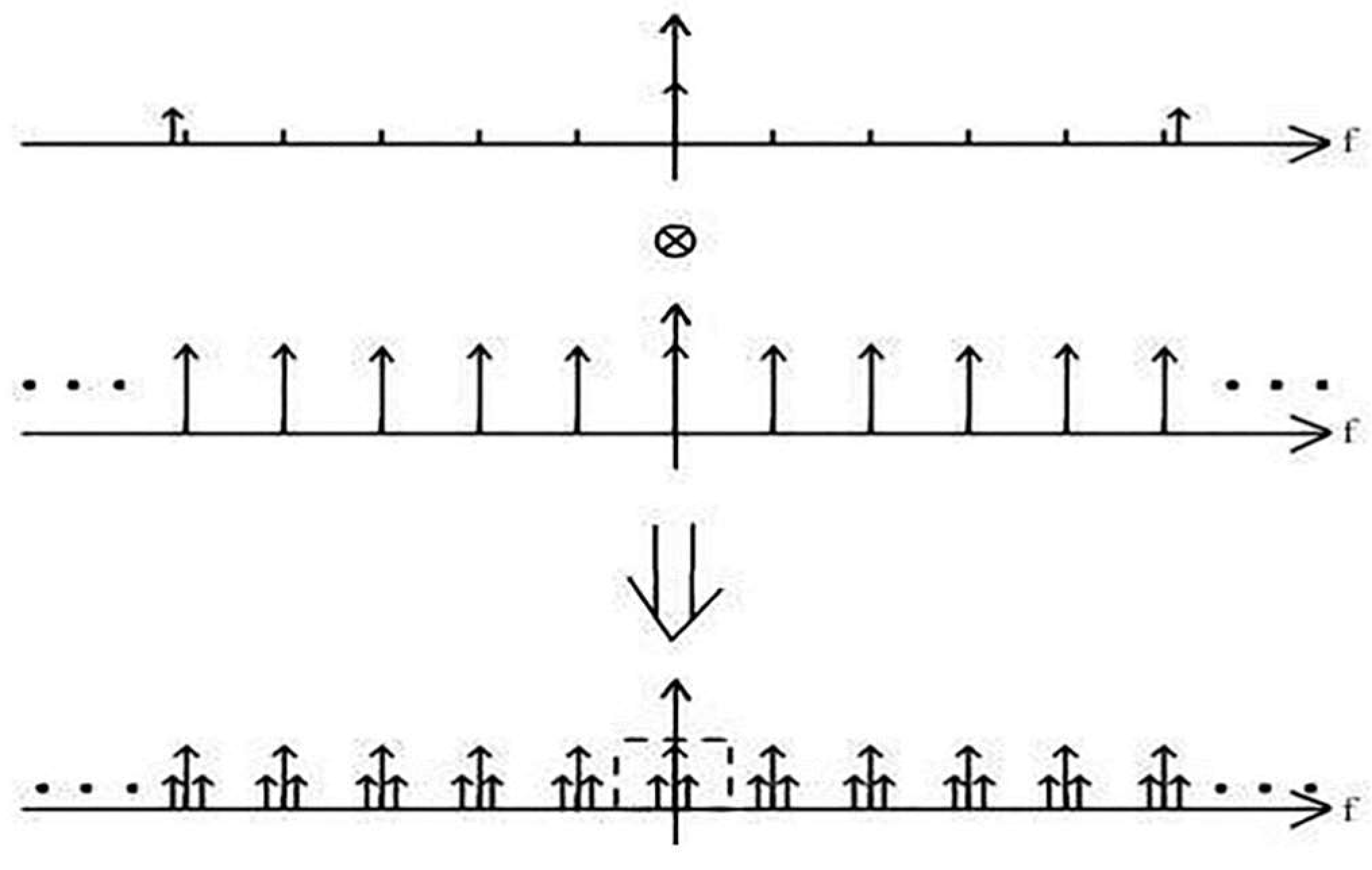
2.3. Wide-Band EMI Imaging
3. Frequency Identification of EMI Sources
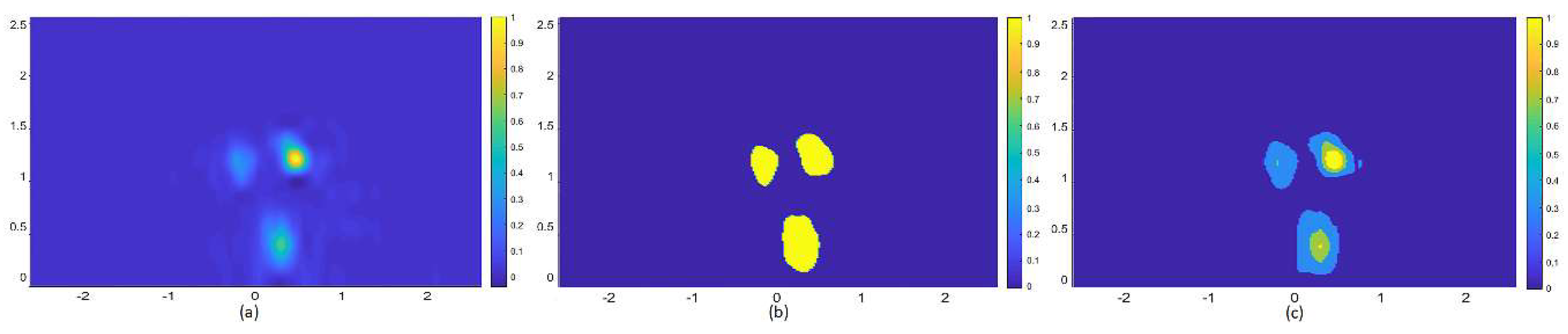
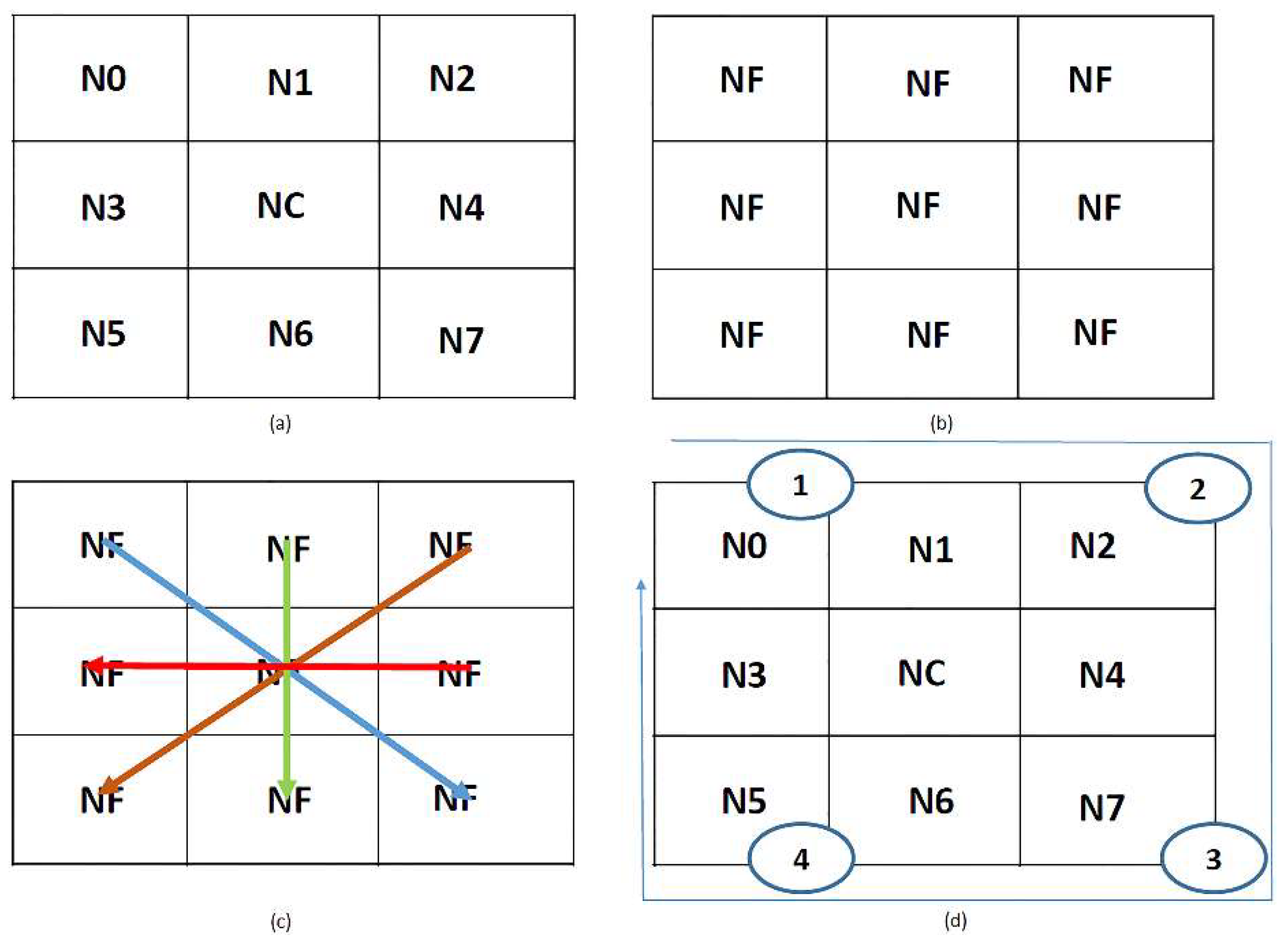
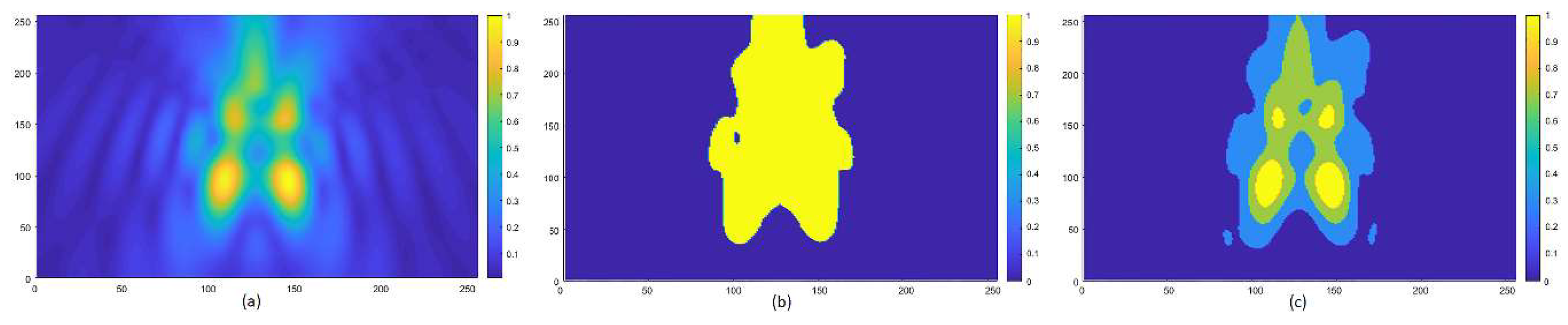
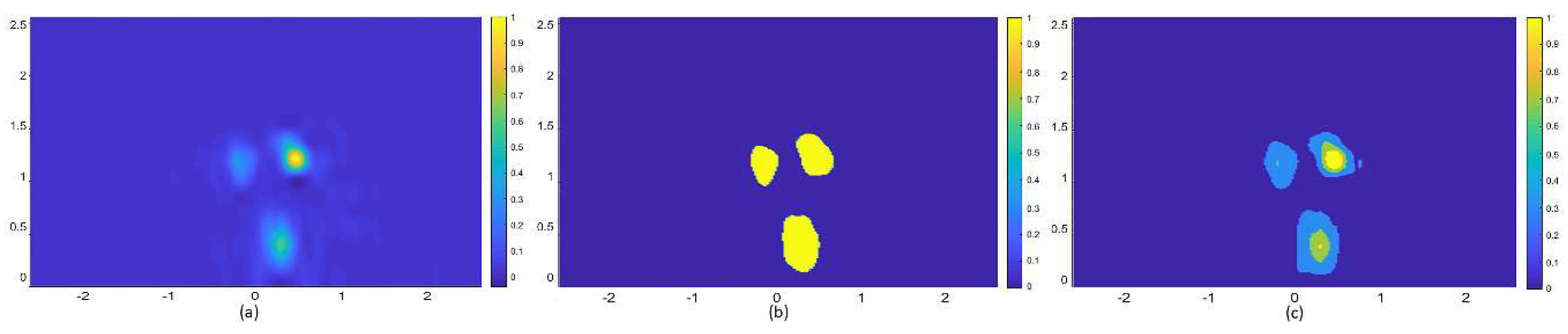
3.1. Multi-Threshold Segmentation
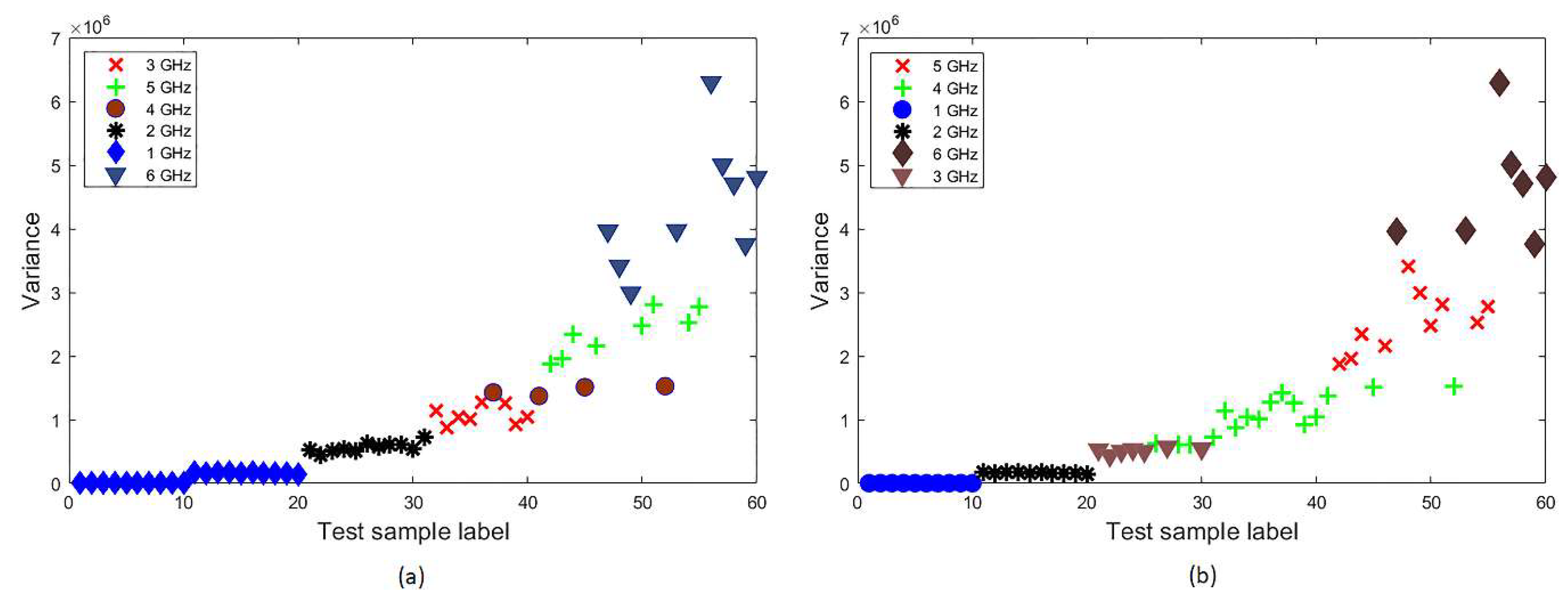
3.2. Based on the Histogram of the Wide-Band Statistic Feature
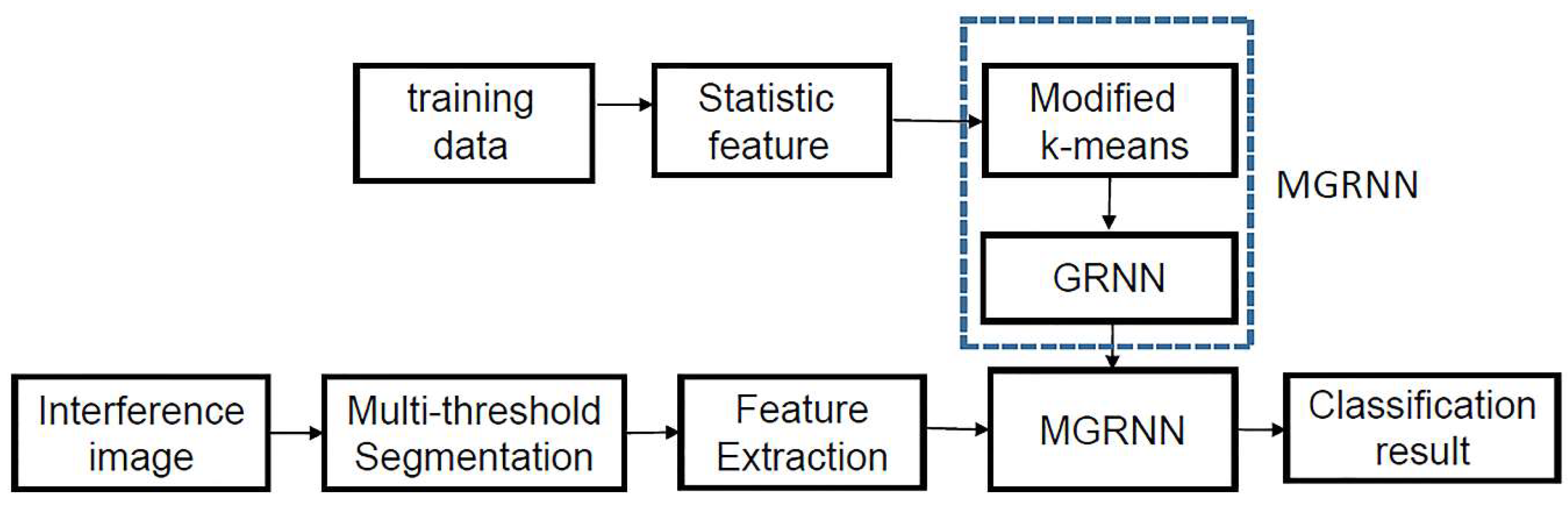
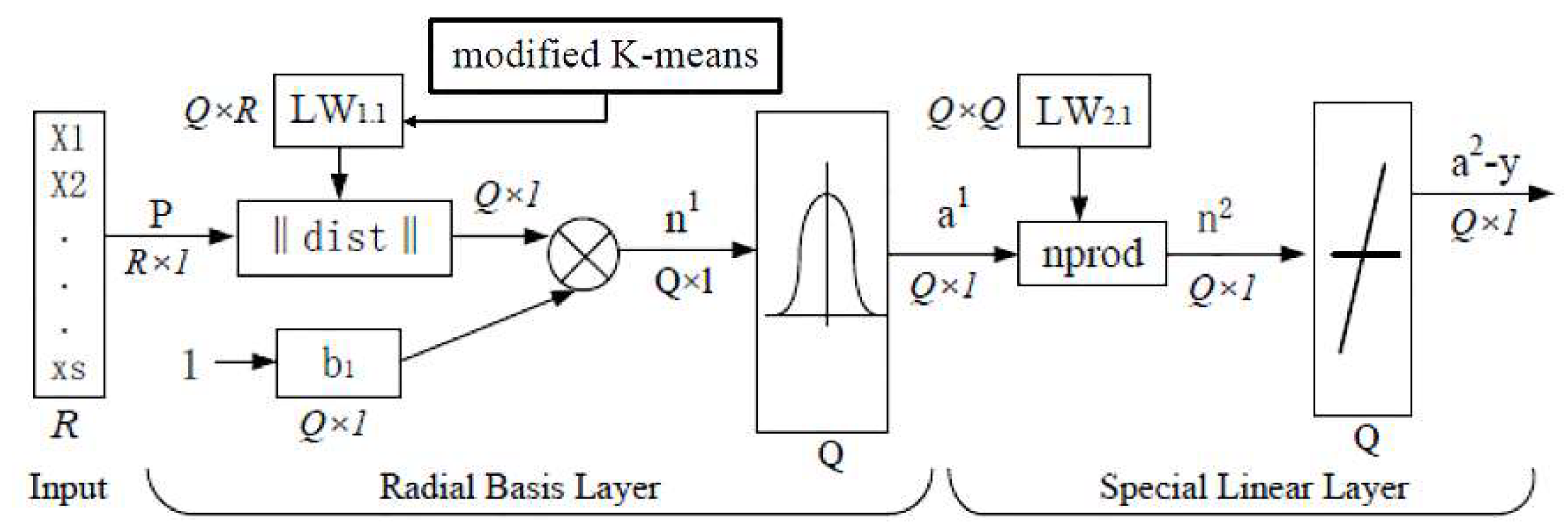
3.3. Modified Generalized Regression Neural Network
4. Results and Discussion
4.1. Localization of Large-Range Wide-Band Electromagnetic Interference Sources
4.2. Multi-Threshold Segmentation Applied on Images
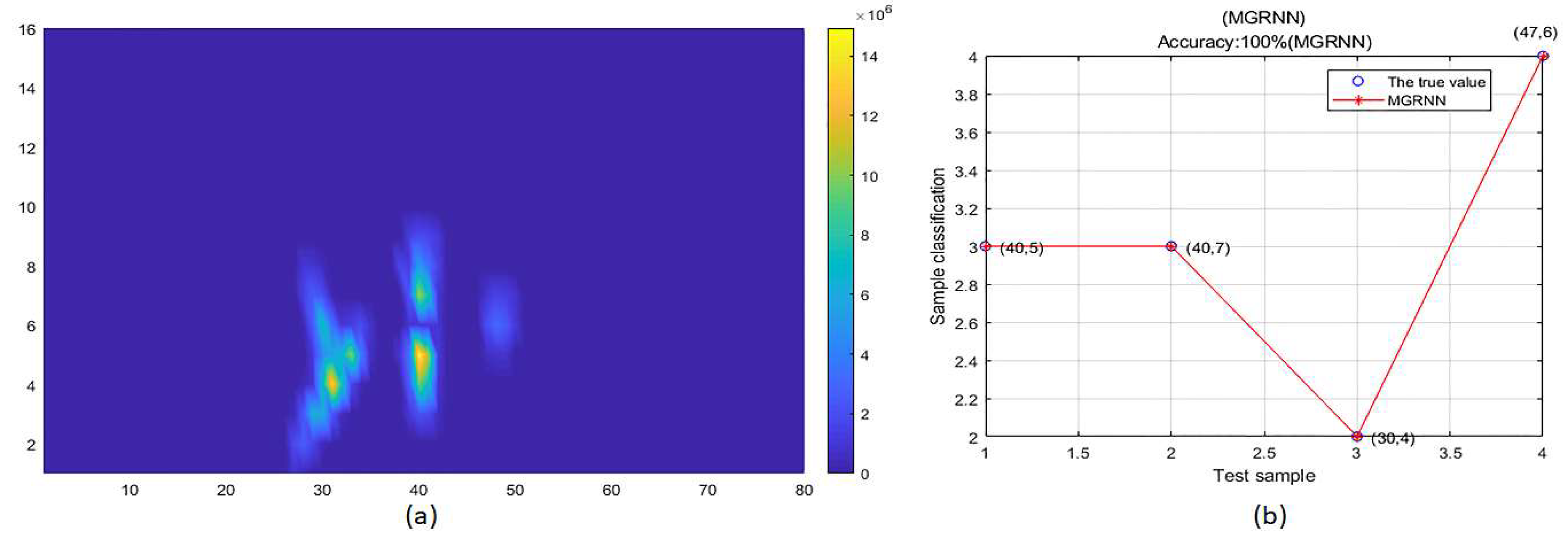
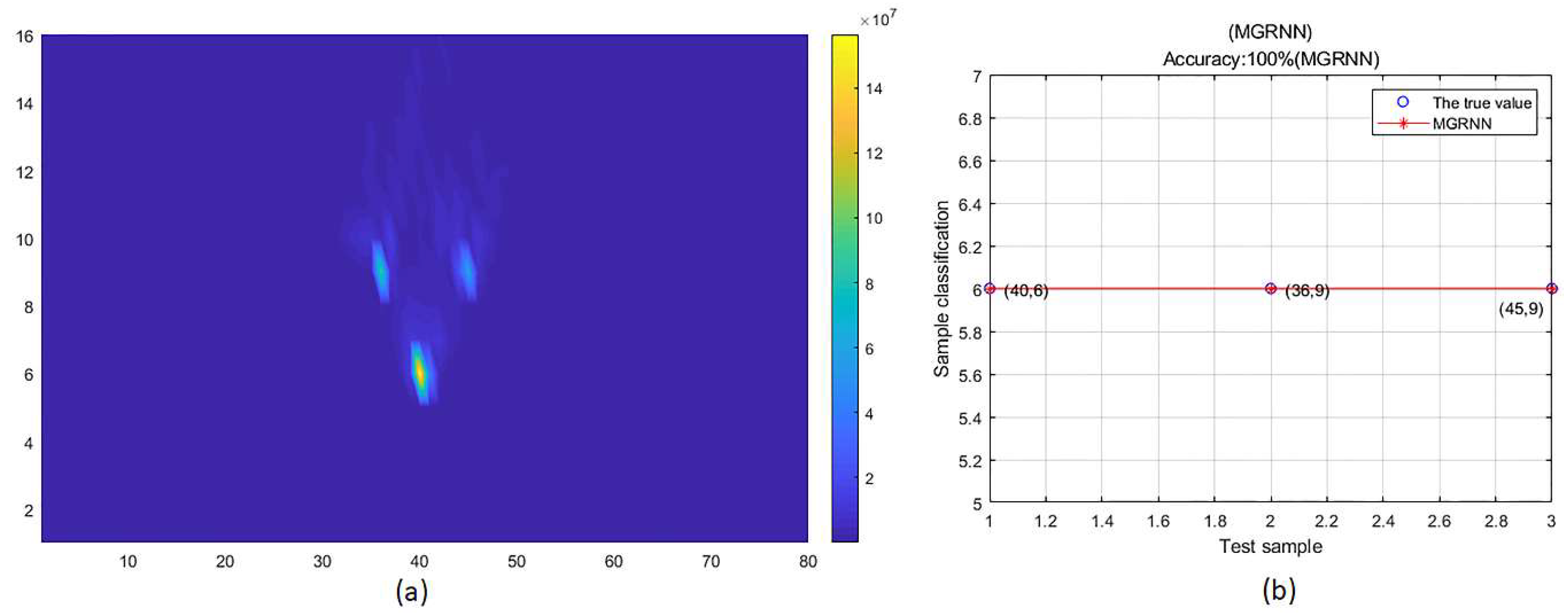
4.3. Frequency Identification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anastasia, G.; Andrey, B.; Maxim, K.; Yury, K. Localization of cyclostationary EMI sources based on near-field measurements. In Proceedings of the 15th International Conference on Electromagnetics in Advanced Applications (ICEAA), Turin, Italy, 9–13 September 2013; pp. 450–455. [Google Scholar]
- Oral Salman, A.; Emrullah, B.; Mehmet, S. Textile antenna for the multi-sensor subsurface detection system. In Proceedings of the 13th International Conference on Ground Penetrating Radar (GPR), Castello Carlo VLecce, Italy, 21–25 June 2010. [Google Scholar]
- Andrey, B.; Anastasia, G.; Maxim, K.; Yury, K. Stochastic EMI sources localization based on ultra wide band near-field measurements. In Proceedings of the 44th European Microwave Conference (EuMC), Rome, Italy, 6–9 October 2014. [Google Scholar]
- Hui, H.; Pratik, M.; David, P. The development of an EM-field probing system for manual near-field scanning. IEEE Trans. Electr. Comput. 2016, 2, 356–363. [Google Scholar]
- Hui, H.; Pratik, M.; Andriy, R.; David, P. EM Radiation estimation using an automatic probe position recording system coupled to hand scanning. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility, Denver, CO, USA, 5–9 August 2013; pp. 349–352. [Google Scholar]
- Hui, H.; Victor, K.; David, P. 2D Imaging system with optical tracking for EMI source localization. In Proceedings of the IEEE Symposium on Electromagnetic Compatibility and Signal Integrity, Santa Clara, CA, USA, 15–21 March 2015; pp. 107–110. [Google Scholar]
- Hui, H.; Pratik, M.; David, P. Optical tracking based EM-field probing system for EMC near field manual scanning. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility (EMC), Raleigh, NC, USA, 4–8 August 2014; pp. 697–701. [Google Scholar]
- Pratik, M.; Victor, K. Application of emission source microscopy technique to EMI source localization above 5 GHz. In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility (EMC), Raleigh, NC, USA, 4–8 August 2014; pp. 7–10. [Google Scholar]
- Pratik, M.; Hamed, K.; David, P.; Dikshit, O. Emission source microscopy technique for EMI source Localization. IEEE Trans. Electr. Comput. 2016, 3, 729–736. [Google Scholar]
- Mojtaba, F.; Joseph, T.; Mohammad, T.G.; Zoughi, R. Piecewise and wiener filter-based SAR techniques for monostatic microwave imaging of layered structures. IEEE Trans. Antennas Propag. 2014, 62, 282–293. [Google Scholar]
- Liu, Y.; Ravelo, B. Fully time-domain scanning of EM near-field radiated by RF circuits. Prog. Electromagn. Res. (PIER) B 2014, 57, 21–46. [Google Scholar] [CrossRef]
- Liu, Y.; Ravelo, B.; Jastrzebski, A.K. Time-domain magnetic dipole model of PCB near-field emission. IEEE Trans. Electromagn. Compat. 2016, 58, 1561–1569. [Google Scholar] [CrossRef]
- Ravelo, B. Radiated near-field emission extraction on 3D curvilinear surfaces from 2D data. Prog. Electromagn. Res. (PIER) M 2015, 44, 191–201. [Google Scholar] [CrossRef]
- Kaur, R.; Ganju, A. Cloud classification in NOAA AVHRR imageries using spectral and textural features. J. Indian Soc. Remote Sens. 2008, 2, 167–174. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, Z.; Wu, L.; Wang, S. A hybrid method for MRI brain image classification. Exp. Syst. Appl. 2011, 38, 10049–10053. [Google Scholar] [CrossRef]
- Azemi-Sadjadi, M.R.; Gao, W.; Vonder-Haar, T.H.; Reinke, D. Temporal updating scheme for probabilistic neural network with application to satellite cloud classification-further results. IEEE Trans. Neural Netw. 2001, 5, 1196–1203. [Google Scholar] [CrossRef] [PubMed]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed]
- Polat, O.; Yildirim, T. Genetic optimization of GRNN for pattern recognition without feature extraction. Expert Syst. Appl. 2007, 4, 25–29. [Google Scholar] [CrossRef]
- Ning, L.; Yu, C.; Tang, W. GRNN small target detection based on sea clutter. Fire Cont. Radar Technol. 2012, 41, 4–7. [Google Scholar]
- Zheng, L.G.; Yu, S.J.; Wang, W.; Yu, M.G. Improved prediction of nitrogen oxides using GRNN with K-means clustering and EDA. Fourth Int. Conf. Nat. Comput. 2008, 2, 91–95. [Google Scholar]
- Liu, Y.X.; Guo, Y.Z. Gray-scale histograms feature extraction using MATLAB. Comput. Knowl. Technol. 2009, 5, 9032–9034. [Google Scholar]
- Zhu, Z.; Rao, S.H.; Zhang, X.P. Performance prediction of switched reluctance motor using improved generalized regression neural networks for design optimization. CES Trans. Electr. Mach. Syst. 2018, 2, 371–376. [Google Scholar]
- Rousseeuw, P.J.; Croux, C. Alternatives to the median absolute deviation. J. Am. Stat. Assoc. 1993, 88, 1273–1283. [Google Scholar] [CrossRef]
- Olukanmi, P.O.; Twala, B. K-means-sharp: Modified centroid update for outlierrobust K-means clustering. In Proceedings of the 2017 Pattern Recognition Association of South Africa and Robotics and Mechatronics (PRASA-RobMech), Bloemfontein, South Africa, 30 November–1 December 2017; p. 17520799. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Variance | Skewness | Kurtosi | Energy |
|---|---|---|---|---|
| PNN (Figure 16) | 95.5% | 15.2% | 9.3% | 41.4% |
| PNN (Figure 17) | 92.3% | 14.2% | 7.6% | 39.7% |
| RBF (Figure 16) | 88% | 16% | 10% | 44% |
| RBF (Figure 17) | 82.4% | 14.6% | 8.9% | 41.1% |
| GRNN (Figure 16) | 98% | 16.6% | 16% | 48% |
| GRNN (Figure 17) | 96.3% | 15.2% | 12.3% | 43.2% |
| Frequency of Interference | MGRNN | GRNN |
|---|---|---|
| 1 GHz | 97.3% | 93.1% |
| 2 GHz | 96.4% | 95.2% |
| 3 GHz | 95.5% | 91.4% |
| 4 GHz | 96.8% | 90.1% |
| 5 GHz | 95.8% | 90.2% |
| 6 GHz | 98.3% | 90.7% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, S.; Wang, T.; Hao, X.; Yang, M.; Zhu, Y.; Li, Y. Localization and Frequency Identification of Large-Range Wide-Band Electromagnetic Interference Sources in Electromagnetic Imaging System. Electronics 2019, 8, 499. https://doi.org/10.3390/electronics8050499
Xie S, Wang T, Hao X, Yang M, Zhu Y, Li Y. Localization and Frequency Identification of Large-Range Wide-Band Electromagnetic Interference Sources in Electromagnetic Imaging System. Electronics. 2019; 8(5):499. https://doi.org/10.3390/electronics8050499
Chicago/Turabian StyleXie, Shuguo, Tianheng Wang, Xuchun Hao, Meiling Yang, Yanju Zhu, and Yuanyuan Li. 2019. "Localization and Frequency Identification of Large-Range Wide-Band Electromagnetic Interference Sources in Electromagnetic Imaging System" Electronics 8, no. 5: 499. https://doi.org/10.3390/electronics8050499
APA StyleXie, S., Wang, T., Hao, X., Yang, M., Zhu, Y., & Li, Y. (2019). Localization and Frequency Identification of Large-Range Wide-Band Electromagnetic Interference Sources in Electromagnetic Imaging System. Electronics, 8(5), 499. https://doi.org/10.3390/electronics8050499