Application of Lagrange Relaxation to Decentralized Optimization of Dispatching a Charging Station for Electric Vehicles

Abstract
:1. Introduction
2. Model for Centralized Optimization
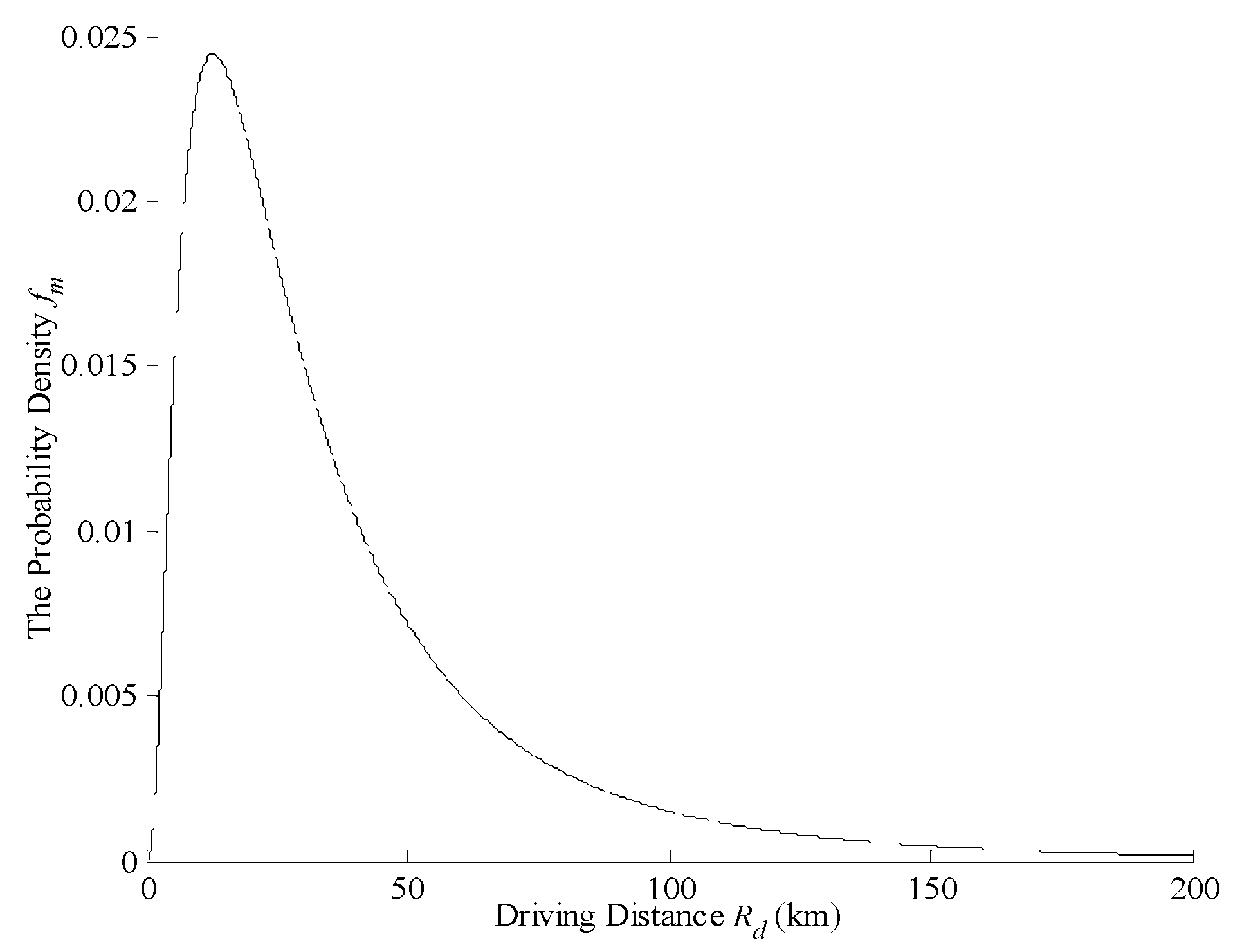
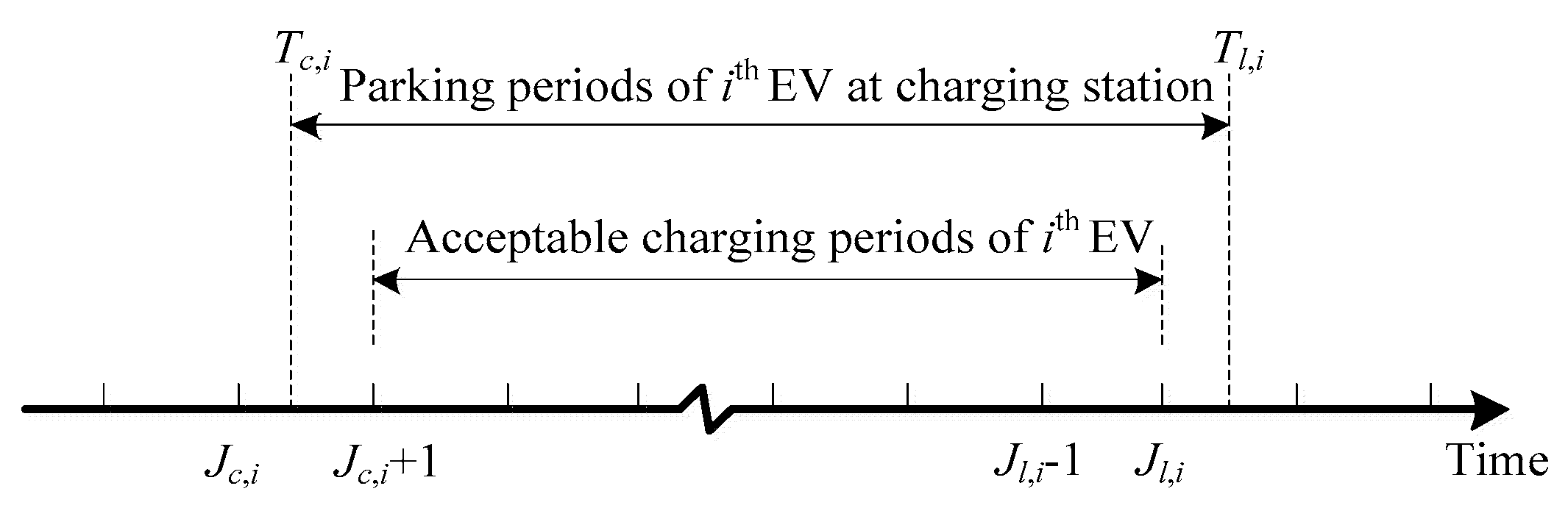
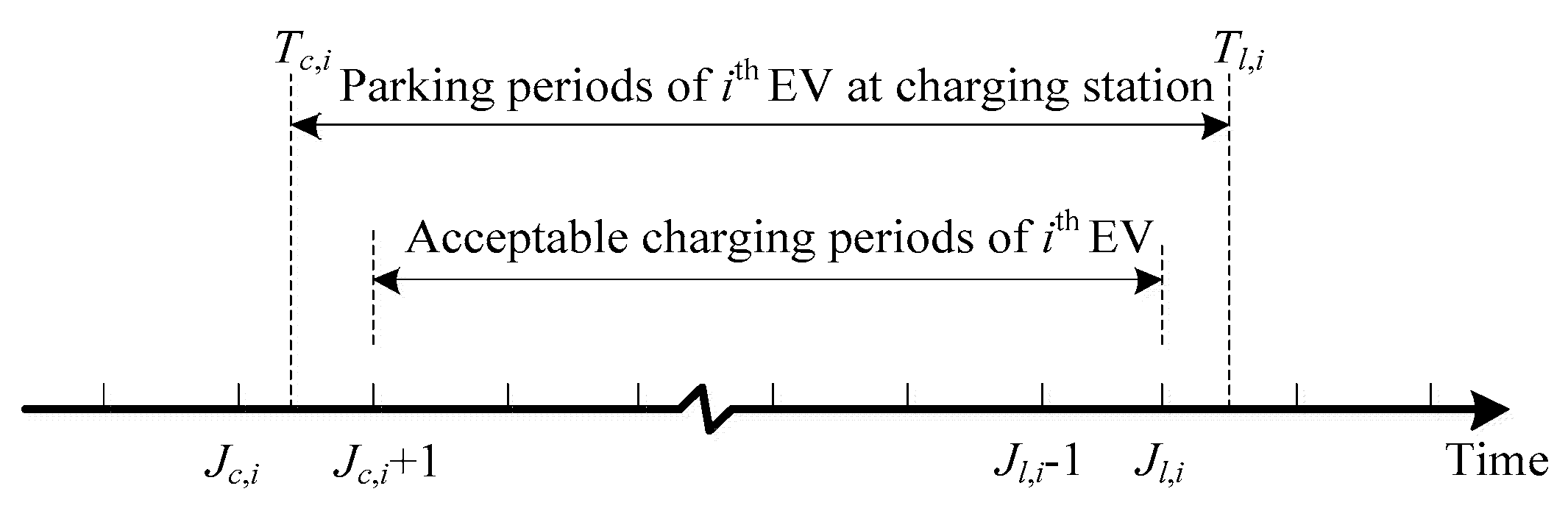
2.1. Mathematical Formulation of EV Charging Load
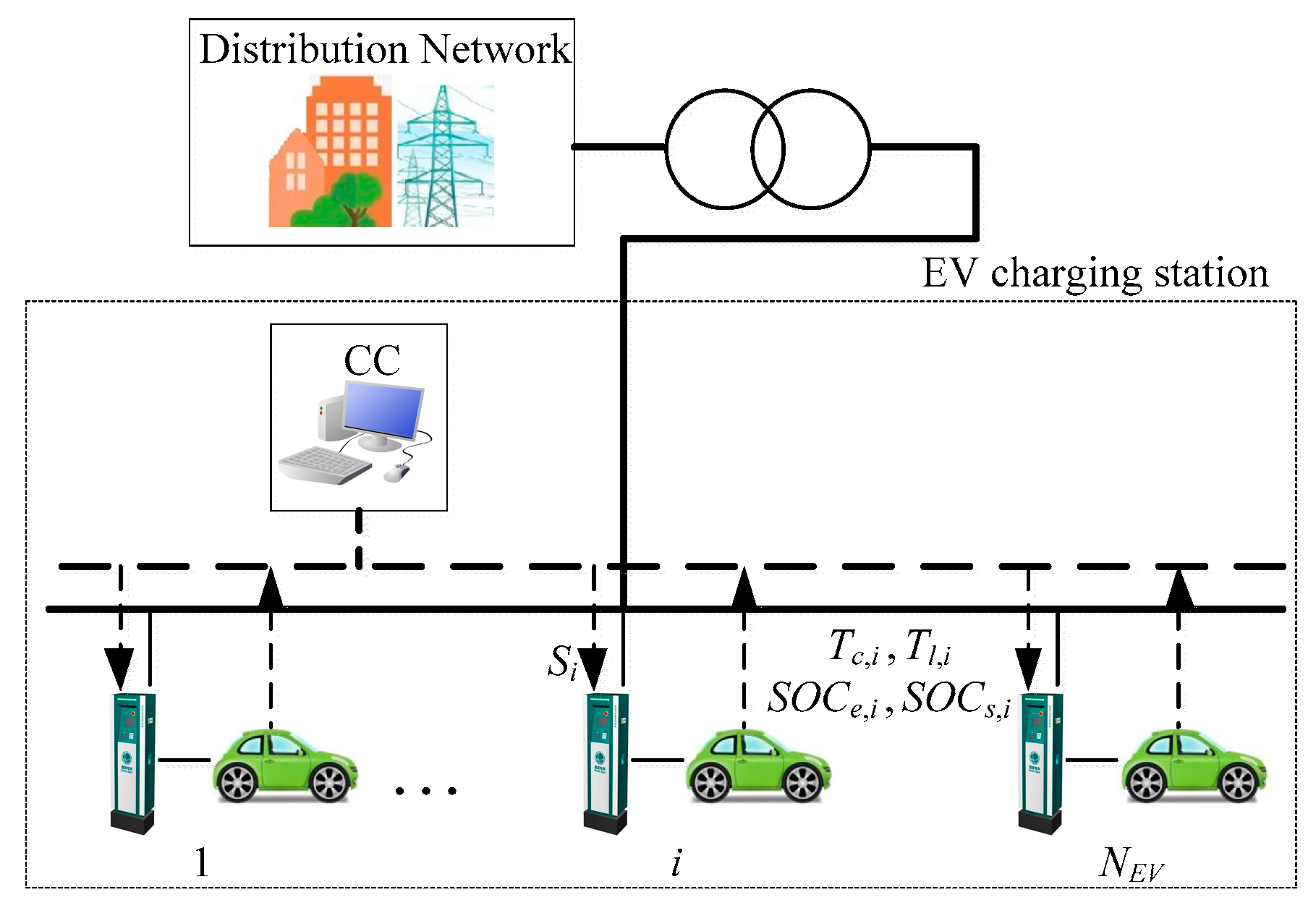
2.2. Centralized Control Scheme and Optimization Model
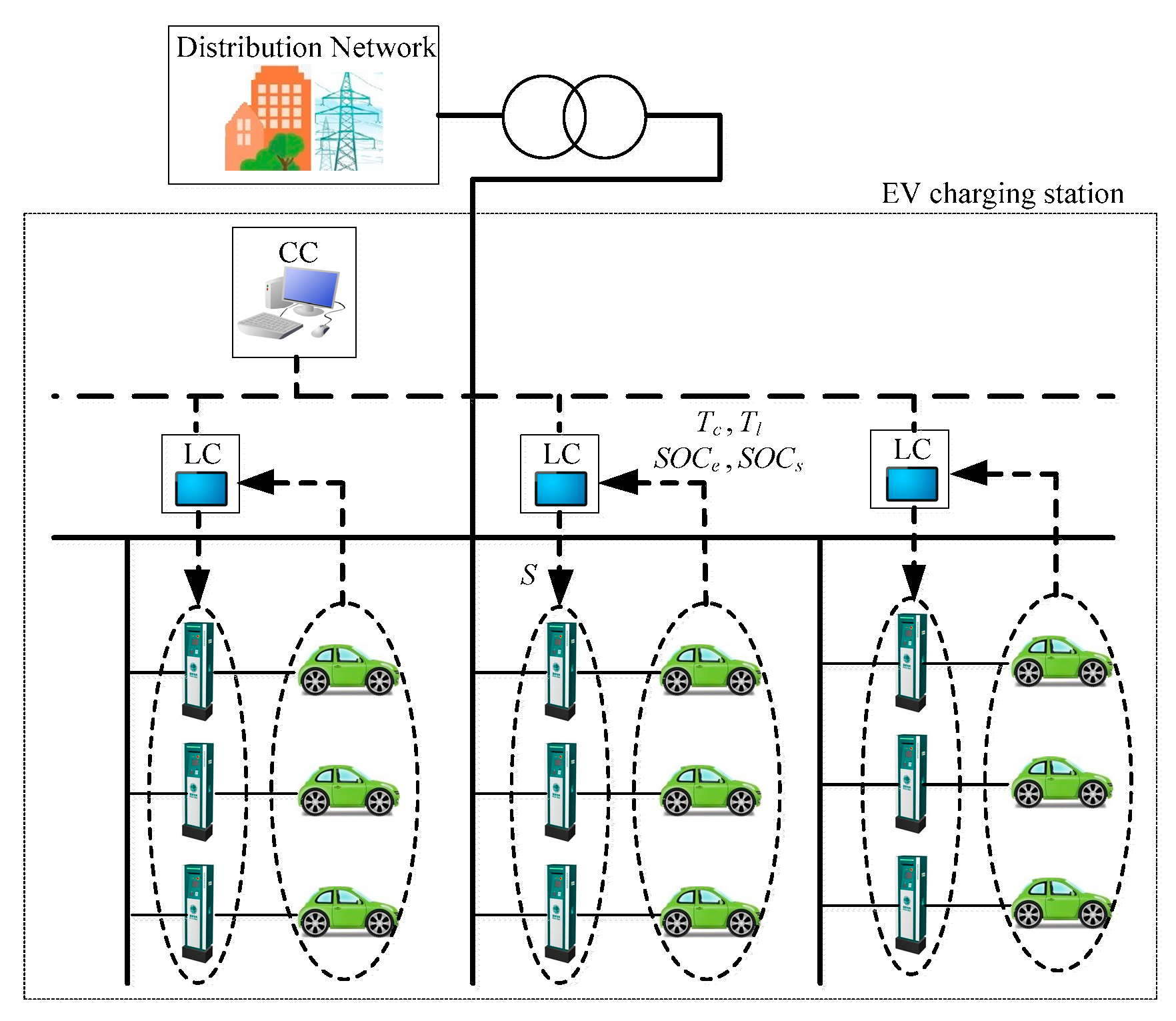
2.2.1. Control Structure
2.2.2. Objective Function
2.2.3. Constraints
3. Formulation of Decentralized Optimization
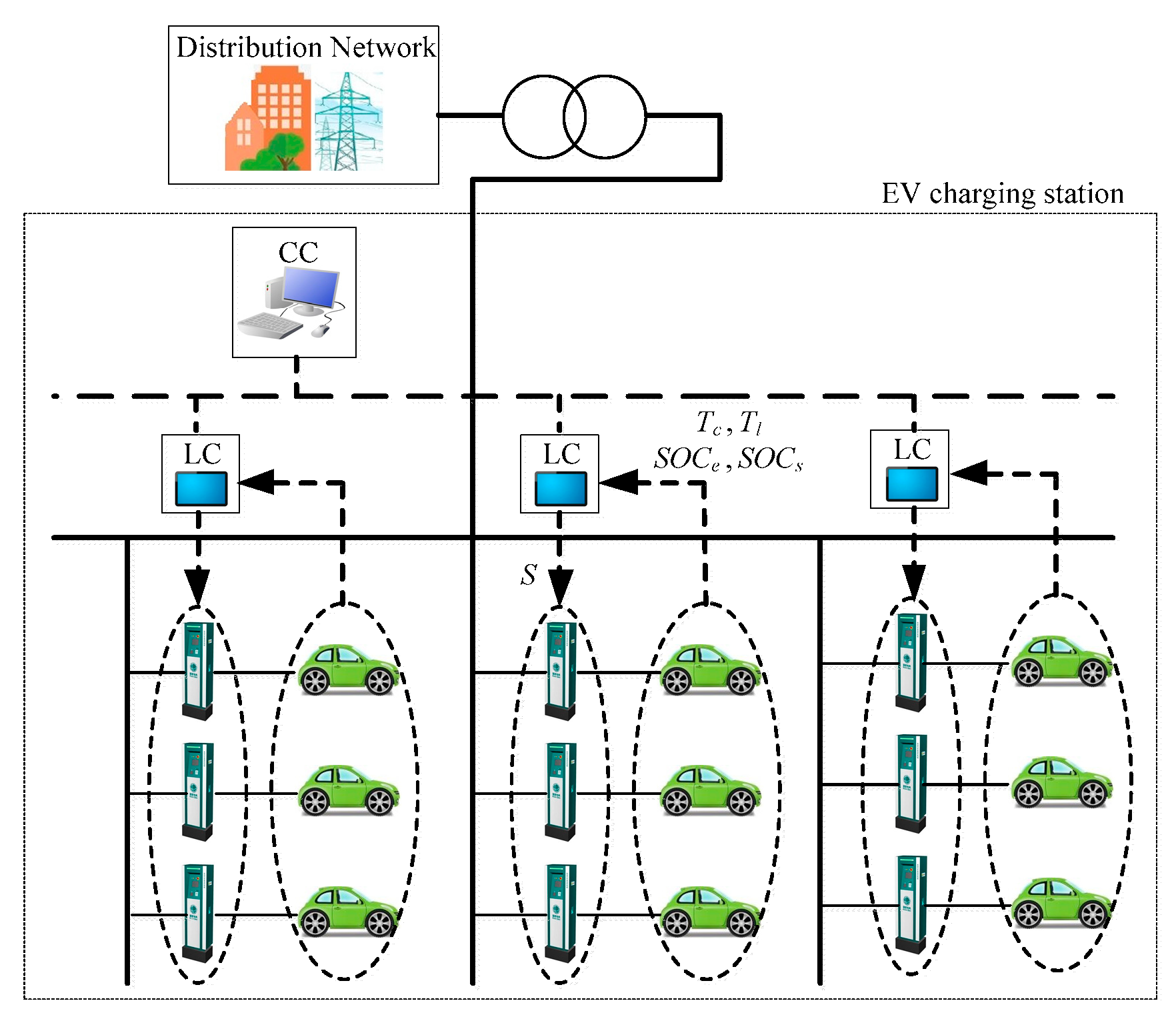
3.1. Decentralized Control and Optimization Architecture
3.2. Application of LRM to Decentralized Optimization
3.2.1. Identification of Sub-Problems
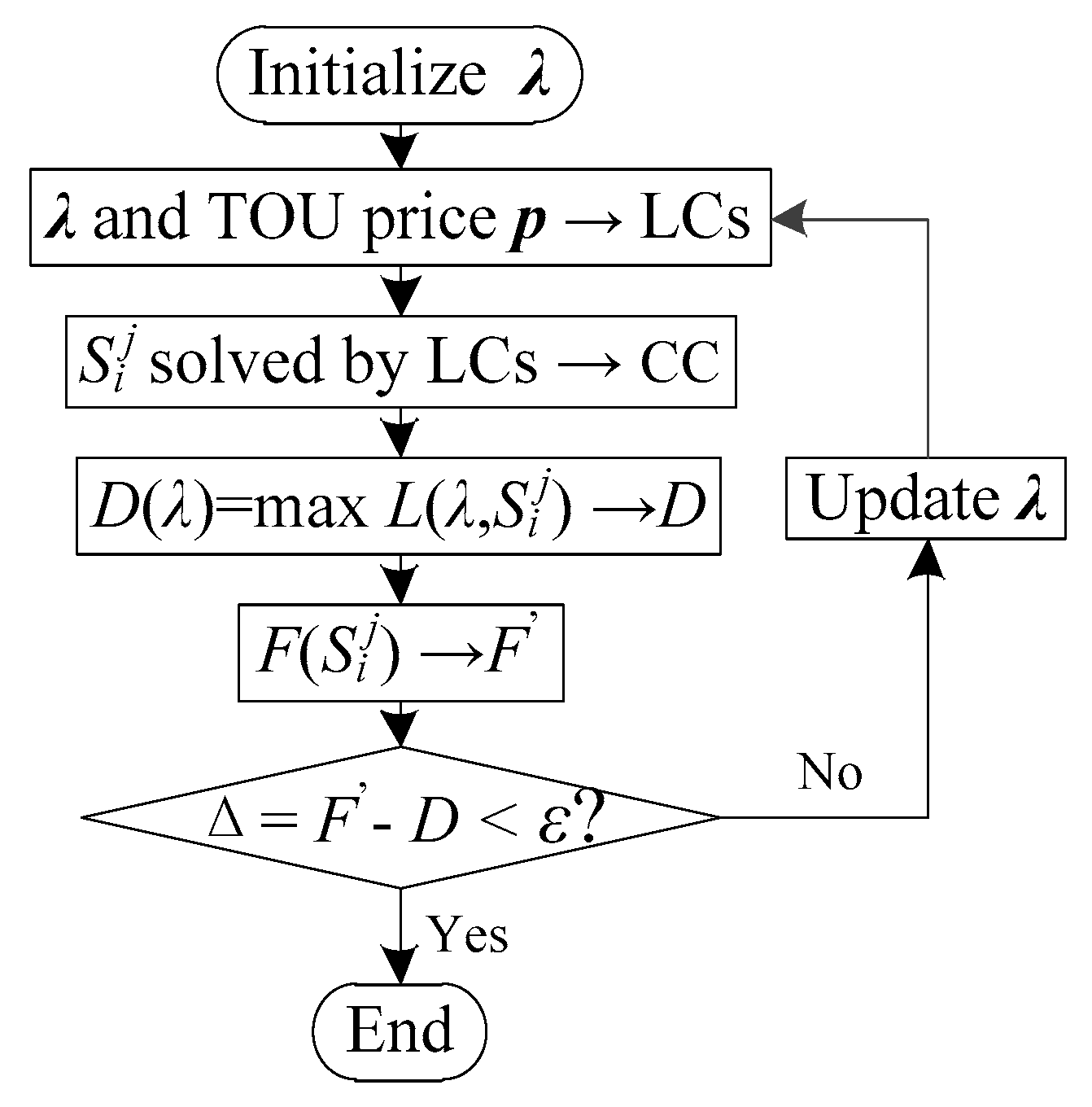
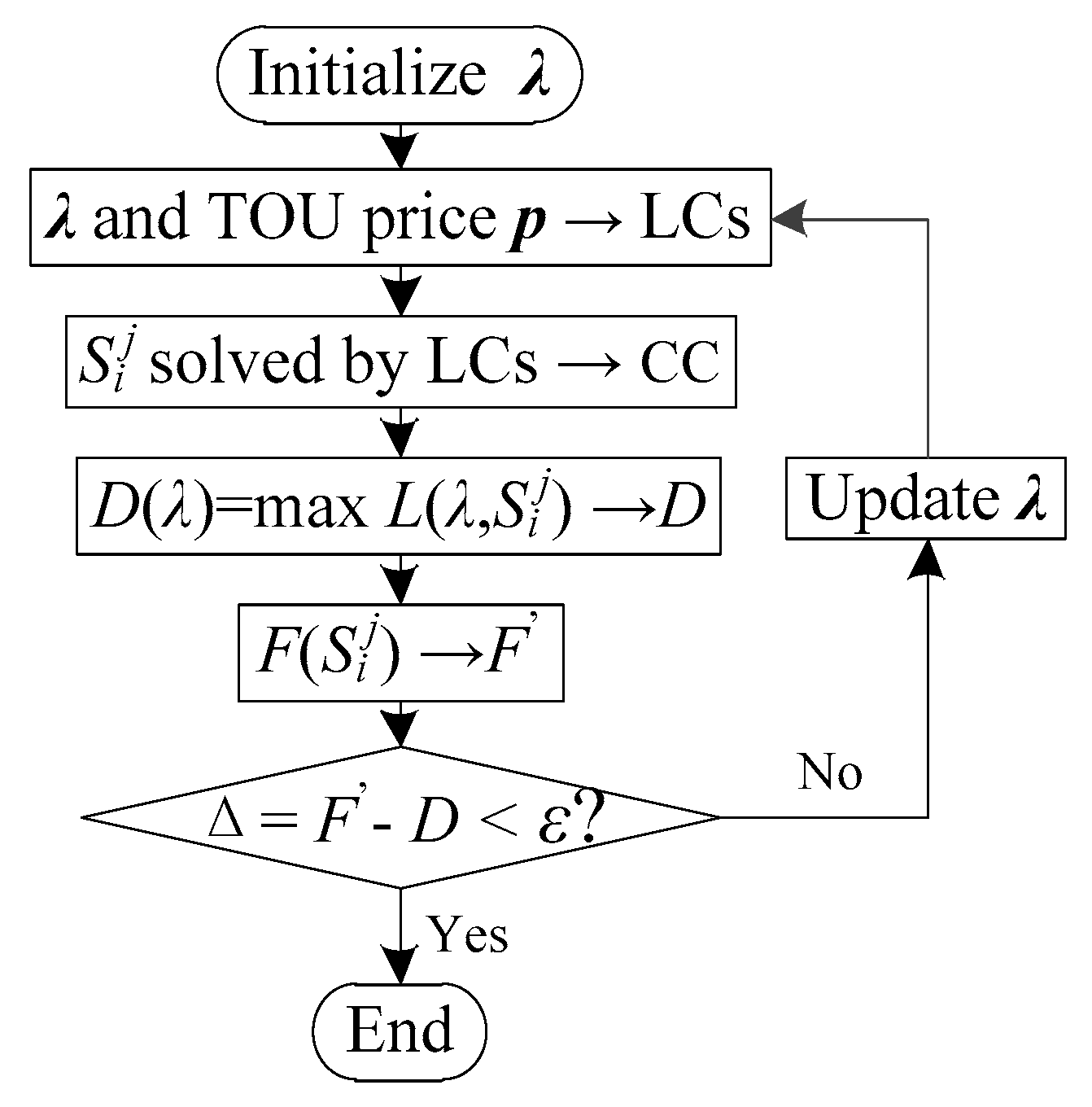
3.2.2. Solution to Dual Problem
3.2.3. Computation of Upper and Lower Bounds for Original Problem
3.2.4. Evaluation of Dual Gap
3.2.5. Updating of λ
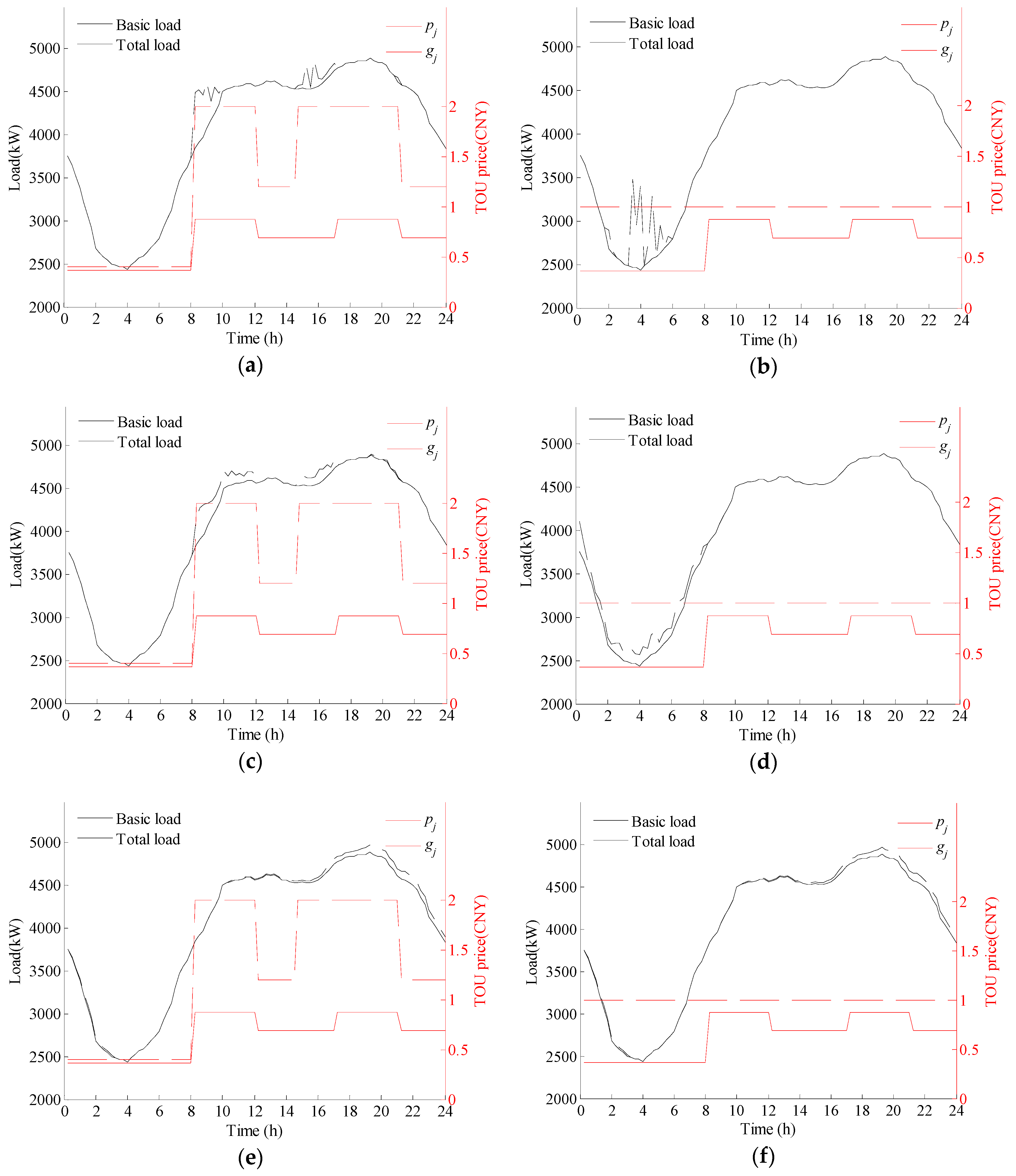
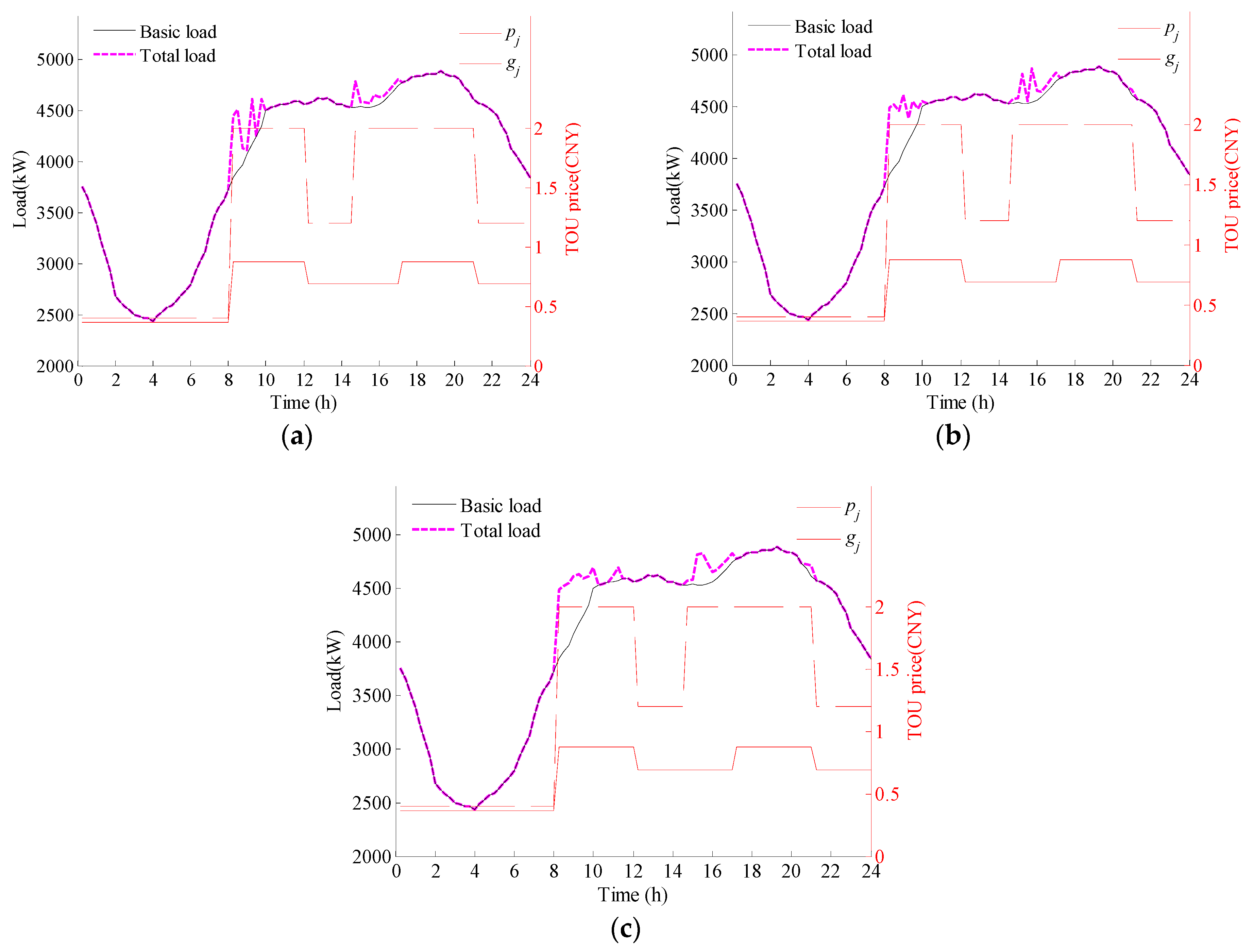
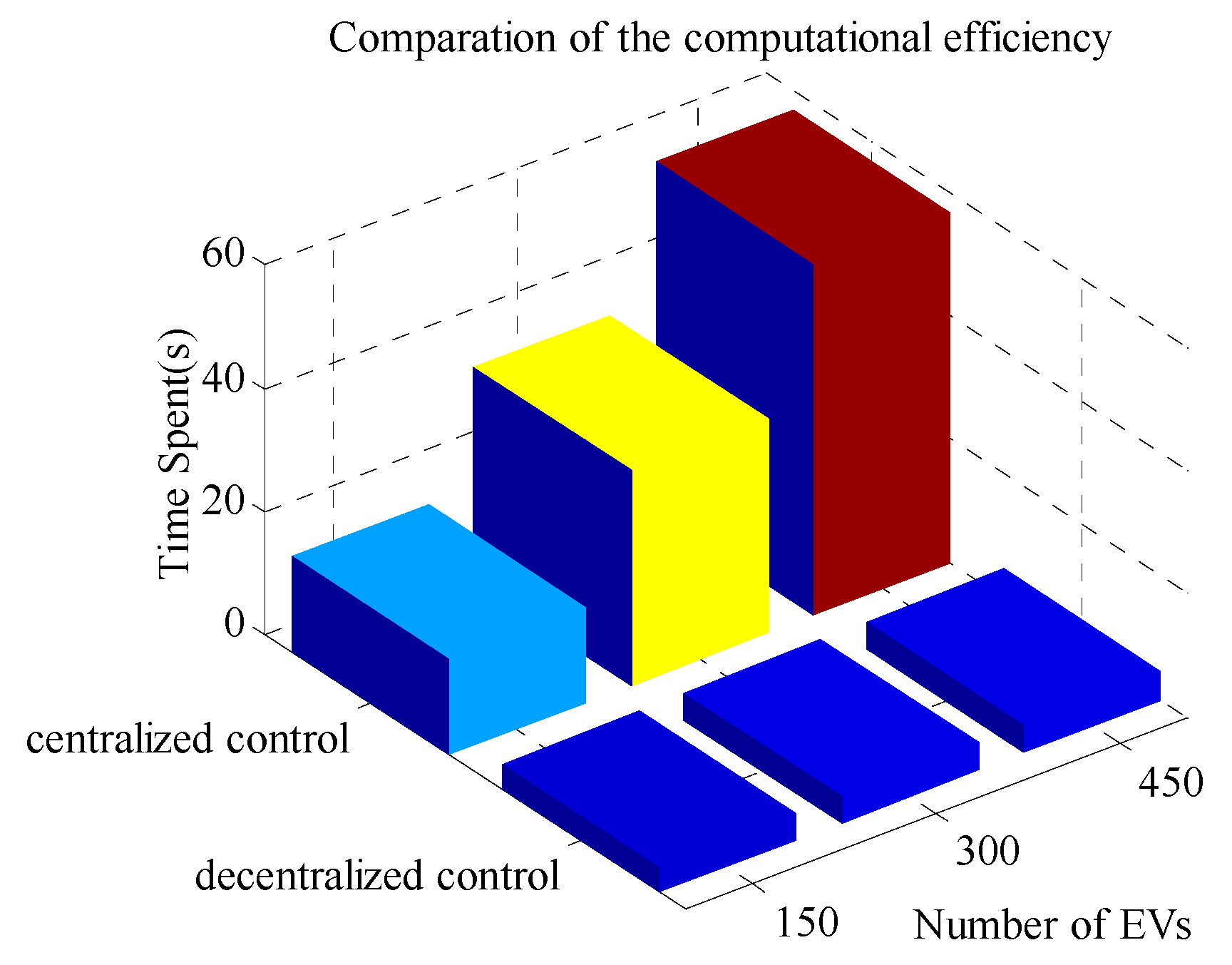
4. Simulations and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, X.; Liu, X.; Zuo, J. The development of new energy vehicles for a sustainable future: A review. Renew. Sustain. Energy Rev. 2015, 42, 298–305. [Google Scholar] [CrossRef]
- Yan, X.; Crookes, R.J. Life cycle analysis of energy use and greenhouse gas emissions for road transportation fuels in China. Renew. Sustain. Energy Rev. 2009, 13, 2505–2514. [Google Scholar] [CrossRef]
- Liu, H.; Zeng, P.; Guo, J.; Wu, H.; Ge, S. An optimization strategy of controlled electric vehicle charging considering demand side response and regional wind and photovoltaic. J. Mod. Power Syst. Clean Energy 2015, 3, 232–239. [Google Scholar] [CrossRef]
- Cortés, A.; Martínez, S. A hierarchical algorithm for optimal plug-in electric vehicle charging with usage constraints. Automatica 2016, 68, 119–131. [Google Scholar] [CrossRef]
- Kang, Q.; Wang, J.B.; Zhou, M.C.; Ammari, A.C. Centralized charging strategy and scheduling algorithm for electric vehicles under a battery swapping scenario. IEEE Trans. Intell. Transp. Syst. 2016, 17, 659–669. [Google Scholar] [CrossRef]
- Ou, C.H.; Liang, H.; Zhuang, W. Investigating wireless charging and mobility of electric vehicles on electricity market. IEEE Trans. Ind. Electron. 2015, 62, 3123–3133. [Google Scholar] [CrossRef]
- Korkas, C.D.; Baldi, S.; Yuan, S.; Kosmatopoulos, E.B. An adaptive learning-based approach for nearly optimal dynamic charging of electric vehicle fleets. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2066–2075. [Google Scholar] [CrossRef]
- Luo, Y.; Zhu, T.; Wan, S.; Zhang, S.; Li, K. Optimal charging scheduling for large-scale EV (electric vehicle) deployment based on the interaction of the smart-grid and intelligent-transport systems. Energy 2016, 97, 359–368. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Hatziargyriou, N.D. A multi-agent system for controlled charging of a large population of electric vehicles. IEEE Trans. Power Syst. 2013, 28, 1196–1204. [Google Scholar] [CrossRef]
- Xydas, E.; Marmaras, C.; Cipcigan, L.M. A multi-agent based scheduling algorithm for adaptive electric vehicles charging. Appl. Energy 2016, 177, 354–365. [Google Scholar] [CrossRef]
- García-Triviño, P.; Torreglosa, J.P.; Fernández-Ramírez, L.M.; Jurado, F. Control and operation of power sources in a medium-voltage direct-current microgrid for an electric vehicle fast charging station with a photovoltaic and a battery energy storage system. Energy 2016, 115, 38–48. [Google Scholar] [CrossRef]
- Wang, D.; Guan, X.; Wu, J.; Li, P.; Zan, P.; Xu, H. Integrated energy exchange scheduling for multimicrogrid system with electric vehicles. IEEE Trans. Smart Grid 2016, 7, 1762–1774. [Google Scholar] [CrossRef]
- Gusrialdi, A.; Qu, Z.; Simaan, M.A. Distributed scheduling and cooperative control for charging of electric vehicles at highway service stations. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2713–2727. [Google Scholar] [CrossRef]
- Xia, M.; Lai, Q.; Zhong, Y.; Li, C.; Chiang, H.-D. Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging. Energy 2016, 9, 159. [Google Scholar] [CrossRef]
- Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Rafique, M.K.; Kim, C.-H. A Bi-Level EV Aggregator Coordination Scheme for Load Variance Minimization with Renewable Energy Penetration Adaptability. Energy 2018, 11, 2809. [Google Scholar] [CrossRef]
- Merlin, A.; Sandrin, P. A new method for unit commitment at electricité de France. IEEE Trans. Power Appar. Syst. 1983, 102, 1218–1225. [Google Scholar] [CrossRef]
- Lai, X.; Xie, L.; Xia, Q.; Zhong, H.; Kang, C. Decentralized multi-area economic dispatch via dynamic multiplier-based Lagrangian relaxation. IEEE Trans. Power Syst. 2015, 30, 3225–3233. [Google Scholar] [CrossRef]
- Lai, X.; Zhong, H.; Xia, Q.; Kang, C. Decentralized intraday generation scheduling for multiarea power systems via dynamic multiplier-based Lagrangian relaxation. IEEE Trans. Power Syst. 2017, 30, 3225–3233. [Google Scholar] [CrossRef]
- Ding, T.; Bie, Z. Parallel augmented Lagrangian relaxation for multi- period economic dispatch using diagonal quadratic approximation method. IEEE Trans. Power Syst. 2017, 32, 1115–1126. [Google Scholar] [CrossRef]
- Hua, B.; Baldick, R.; Wang, J. Representing operational flexibility in generation expansion planning through convex relaxation of unit commitment. IEEE Trans. Power Syst. 2017, 33, 2272–2281. [Google Scholar] [CrossRef]
- US Department of Transportation, Federal Highway Administration. 2009 national household travel survey. Available online: http//nhts.ornl.gov/2009/pub/stt.pdf (accessed on 18 March 2018).
- Tian, L.; Shi, S.; Jia, Z. A Statistical Model for Charging Power Demand of Electric Vehicles. Power Syst. Technol. 2010, 34, 126–130. [Google Scholar] [CrossRef]
- Xu, S.; Feng, D.; Yan, Z.; Zhang, L.; Li, N.; Jing, L.; Wang, J. Ant-Based Swarm Algorithm for Charging Coordination of Electric Vehicles. Int. J. Distrib. Sens. Netw. 2013, 9, 268942. [Google Scholar] [CrossRef]
- Sun, X.; Wang, W.; Su, S.; Jiang, J.C.; Xu, L.J.; He, X.H. Coordinated charging strategy for electric vehicles based on time-of-use price. Autom. Electr. Power Syst. 2013, 37, 191–195. [Google Scholar] [CrossRef]
- Zhang, L.; Yan, Z.; Feng, D.H.; Xu, S.L.; Li, N.H.; Jing, L. Two-stage optimization model based coordinated charging for EV charging station. Power Syst. Technol. 2014, 38, 967–974. [Google Scholar] [CrossRef]
- Pan, Z.N.; Zhang, X.S.; Yu, T.; Wan, D.Z. Hierarchical real-time optimized dispatching for large-scale clusters of electric vehicles. Autom. Electr. Power Syst. 2017, 41, 96–104. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Variable | Value |
|---|---|---|---|
| NT | 96 | Pe | 7 kW |
| ΔT | 15 min | η | 0.95 |
| PM | 5087 kW | Ed100 | 15 kW·h |
| Cc | 32 kW·h | SOCe | 95% |
| Time Interval | pj /CNY (kWh)-1 | gj /CNY (kWh)-1 |
|---|---|---|
| 00:00-08:00 | 0.365 | 0.4 |
| 08:00-12:00 | 0.869 | 2.0 |
| 12:00-14:30 | 0.687 | 1.2 |
| 14:30-17:00 | 0.687 | 2.0 |
| 17:00-21:00 | 0.869 | 2.0 |
| 21:00-24:00 | 0.687 | 1.2 |
| Case | F(CNY) | Case | F(CNY) |
|---|---|---|---|
| Case 1 | 1348.375 | Case 4 | 654.526 |
| Case 2 | 644.526 | Case 5 | 796.749 |
| Case 3 | 1353.375 | Case 6 | 240.599 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, S.; Feng, Y.; Wang, X. Application of Lagrange Relaxation to Decentralized Optimization of Dispatching a Charging Station for Electric Vehicles. Electronics 2019, 8, 288. https://doi.org/10.3390/electronics8030288
Cheng S, Feng Y, Wang X. Application of Lagrange Relaxation to Decentralized Optimization of Dispatching a Charging Station for Electric Vehicles. Electronics. 2019; 8(3):288. https://doi.org/10.3390/electronics8030288
Chicago/Turabian StyleCheng, Shan, Yichen Feng, and Xianning Wang. 2019. "Application of Lagrange Relaxation to Decentralized Optimization of Dispatching a Charging Station for Electric Vehicles" Electronics 8, no. 3: 288. https://doi.org/10.3390/electronics8030288
APA StyleCheng, S., Feng, Y., & Wang, X. (2019). Application of Lagrange Relaxation to Decentralized Optimization of Dispatching a Charging Station for Electric Vehicles. Electronics, 8(3), 288. https://doi.org/10.3390/electronics8030288