Nonlinear Position Stabilizing Control with Active Damping Injection Technique for Magnetic Levitation Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
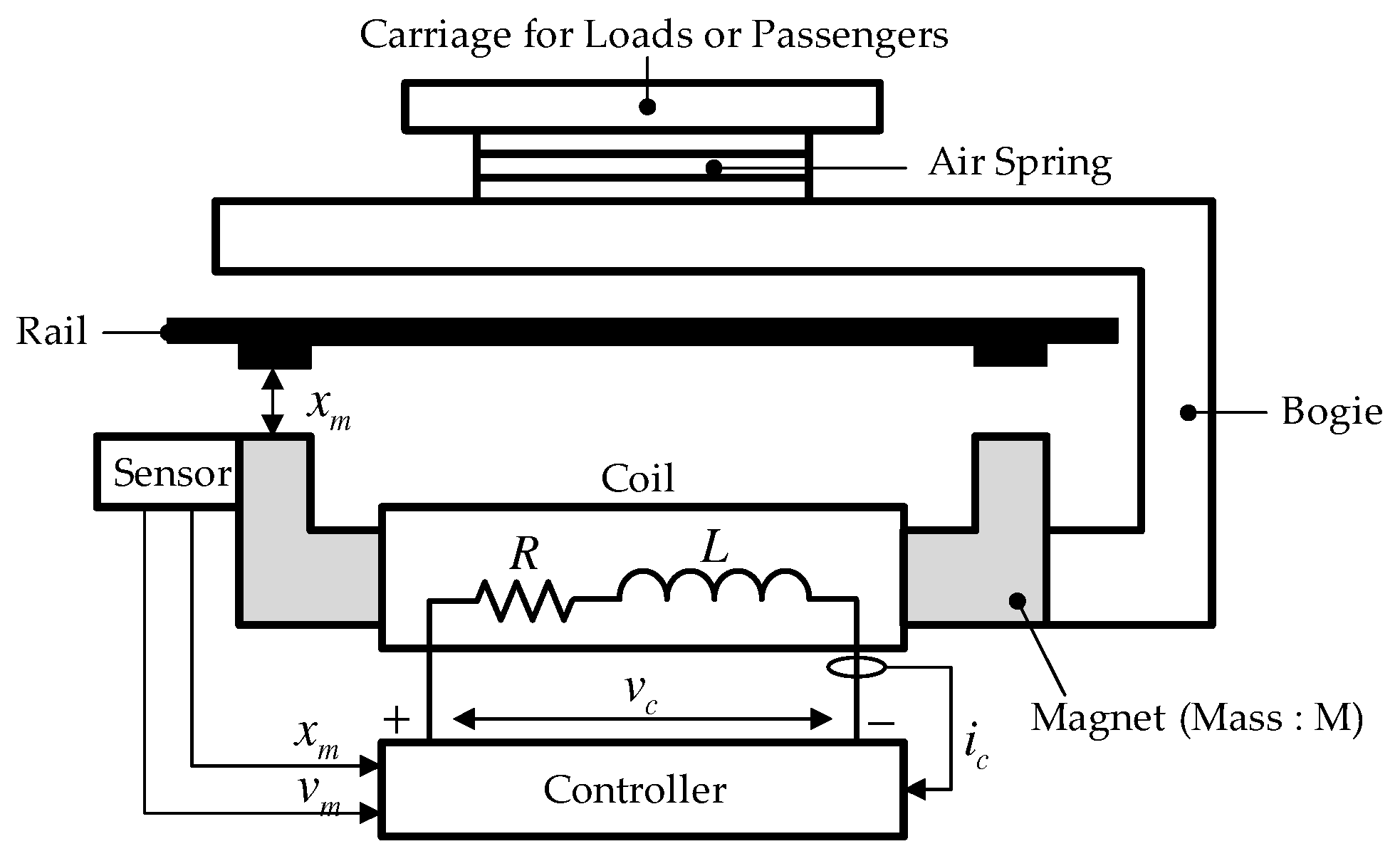
2. MAGLEV Nonlinear Behaviors
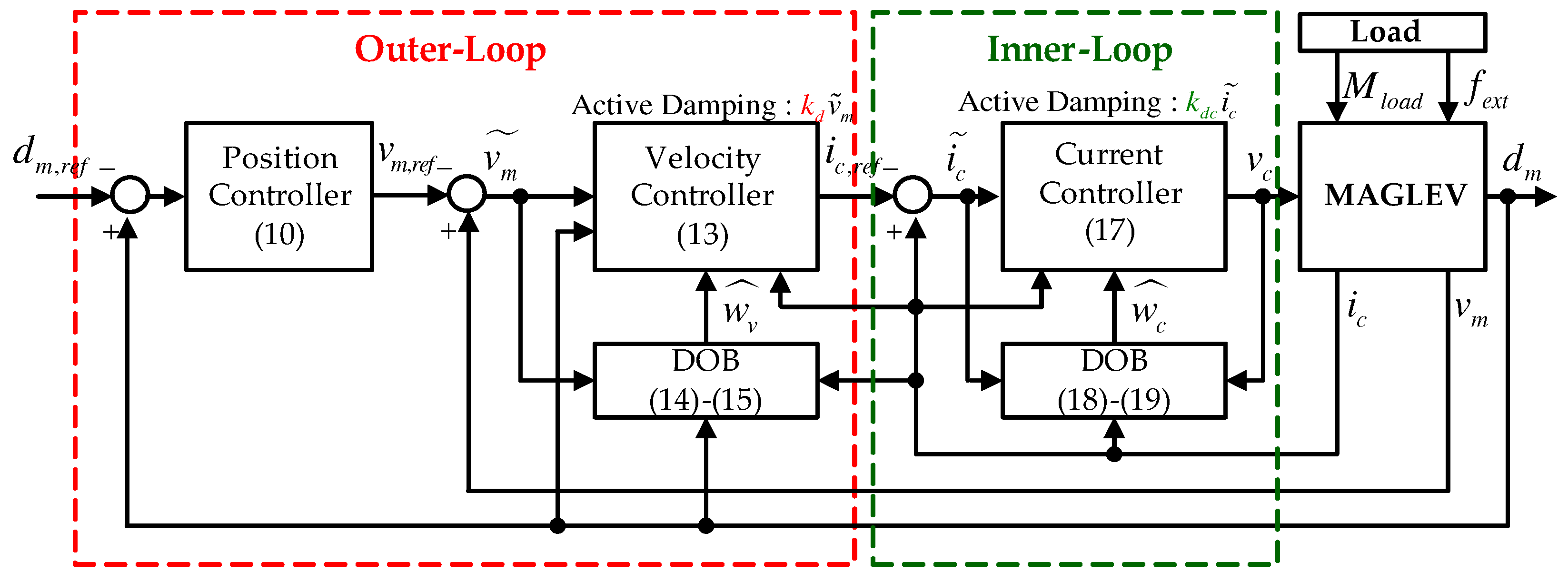
3. Position Stabilizing Controller Design
3.1. Outer-Loop Design
3.1.1. Position Controller
3.1.2. Velocity Controller
3.2. Inner-Loop Design
3.3. Analysis
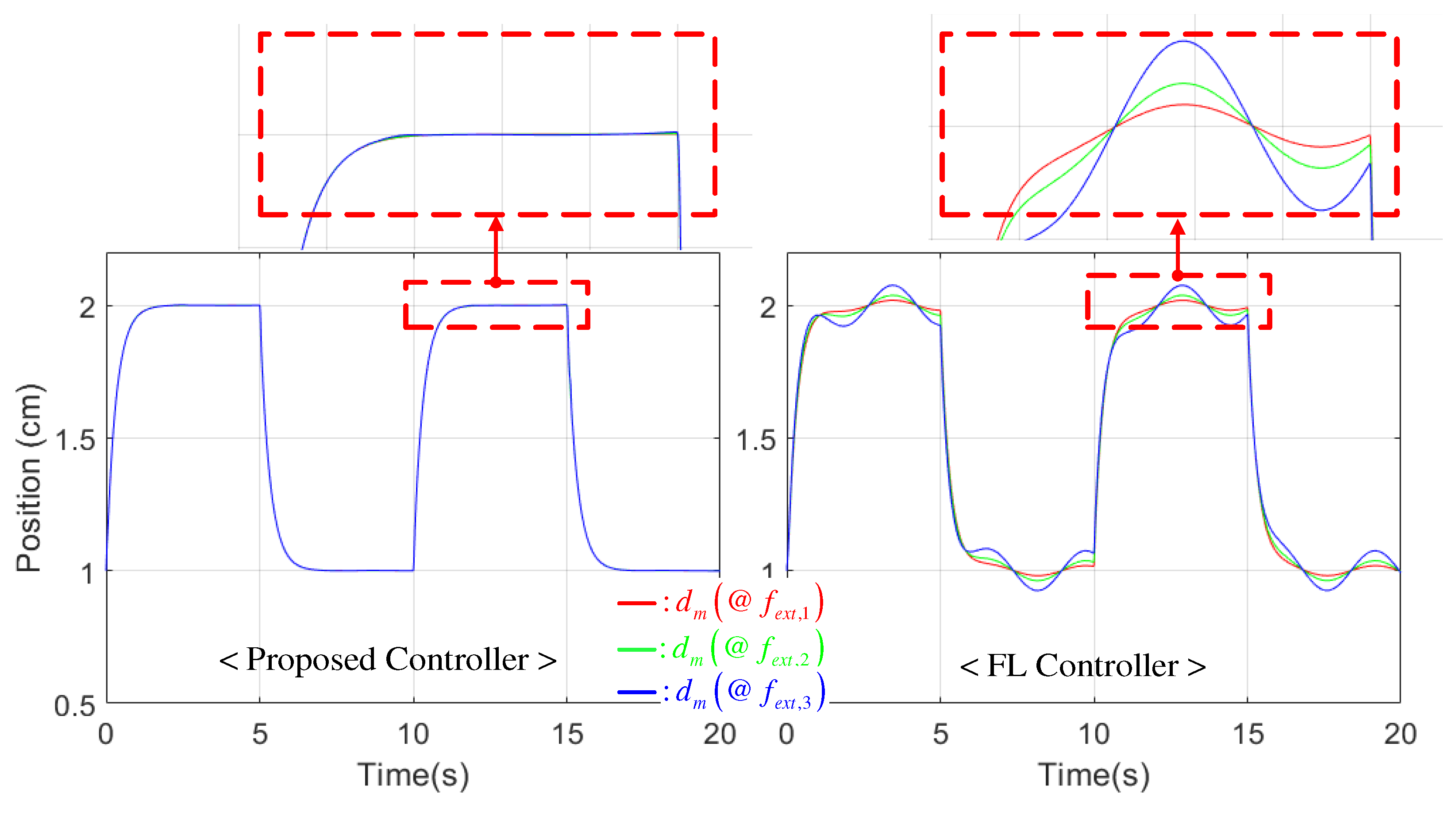
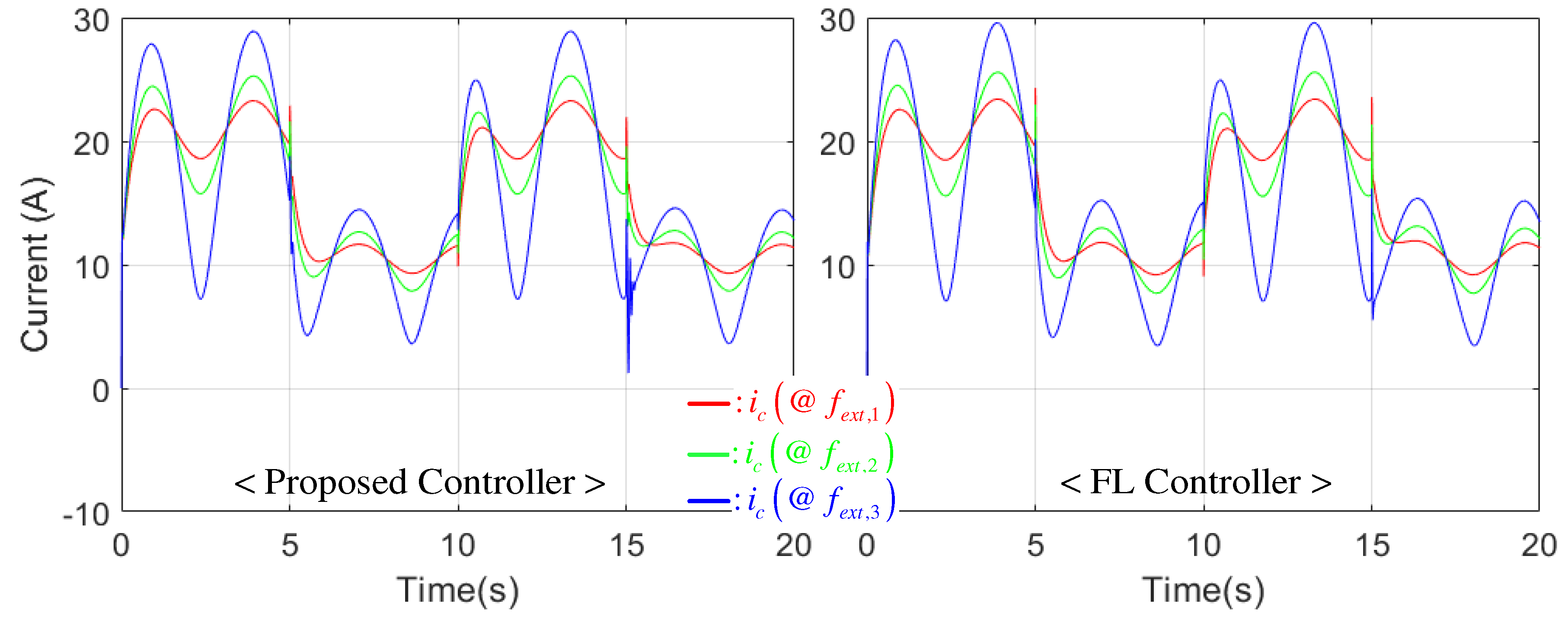
4. Simulations
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Wang, Z.; Li, X.; Xie, Y.; Long, Z. MAGLEV Train Signal Processing Architecture Based on Nonlinear Discrete Tracking Differentiator. Sensors 2018, 18, 1697. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, K.; Tada, M.; Narita, T.; Kato, H. Electromagnetic Levitation Control for Bending Flexible Steel Plate: Experimental Consideration on Disturbance Cancellation Control. Actuators 2018, 7, 43. [Google Scholar] [CrossRef]
- Wang, L.; Li, J.; Zhou, D.; Li, J. An Experimental Validated Control Strategy of MAGLEV Vehicle-Bridge Self-Excited Vibration. Actuators 2017, 7, 38. [Google Scholar] [CrossRef]
- Wang, L.; Li, J.; Zhou, D.; Li, J. Development of Propulsion Inverter Control System for High-Speed MAGLEV based on Long Stator Linear Synchronous Motor. Energies 2017, 10, 170. [Google Scholar]
- Zhang, Z.; Li, X. Real-Time Adaptive Control of a Magnetic Levitation System with a Large Range of Load Disturbance. Sensors 2018, 18, 1512. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.J.; Minashima, M. Robust Nonlinear Control of a Feedback Linearizable Voltage-Controlled Magnetic Levitation System. IEEJ Trans. Electron. Inf. Syst. 2001, 121, 1203–1211. [Google Scholar] [CrossRef]
- Zhang, L.; Campbell, S.; Huang, L. Nonlinear analysis of a MAGLEV system with time-delayed feedback control. Phys. D Nonlinear Phenom. 2012, 240, 1761–1770. [Google Scholar] [CrossRef]
- Santos, M.; Ferreira, J.; Simoes, J.; Pascoal, R.; Torrao, J.; Xue, X.; Furlani, E. Magnetic levitation-based electromagnetic energy harvesting: A semi-analytical non-linear model for energy transduction. Sci. Rep. 2016, 6, 18579. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhang, L. Hopf bifurcation of time-delayed feedback control for MAGLEV system with flexible guideway. Appl. Math. Comput. 2013, 219, 6106–6112. [Google Scholar] [CrossRef]
- Cho, H.W.; Yu, J.S.; Jang, S.M.; Kim, C.H.; Lee, J.M.; Han, H.S. Equivalent Magnetic Circuit Based Levitation Force Computation of Controlled Permanent Magnet Levitation System. IEEE Trans. Magn. 2012, 48, 4038–4041. [Google Scholar] [CrossRef]
- Jeong, J.H.; Ha, C.W.; Lim, J.; Choi, J.Y. Analysis and Control of the Electromagnetic Coupling Effect of the Levitation and Guidance Systems for a Semi-High-Speed MAGLEV Using a Magnetic Equivalent Circuit. IEEE Trans. Magn. 2016, 52, 8300104. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.; Lee, J. Review of MAGLEV train technologies. IEEE Trans. Magn. 2006, 42, 1917–1925. [Google Scholar]
- Shamma, J.; Athans, M. Analysis of gain scheduled control of nonlinear plants. IEEE Trans. Autom. Control 2002, 35, 898–907. [Google Scholar] [CrossRef]
- Wai, R.; Lee, J.; Chuang, K. Real-time PID control strategy for MAGLEV transportation system via particle swarm optimization. IEEE Trans. Ind. Electron. 2011, 58, 629–646. [Google Scholar] [CrossRef]
- Kim, C.H. Robust Control of Magnetic Levitation Systems Considering Disturbance Force by LSM Propulsion Systems. IEEE Trans. Magn. 2017, 53, 8300805. [Google Scholar] [CrossRef]
- Wai, R.J.; Lee, J.D. Backstepping-based levitation control design for linear magnetic levitation rail system. IET Control Theory Appl. 2008, 2, 72–86. [Google Scholar] [CrossRef]
- Sadek, U.; Sarja, A.; Chowdhury, A.; Svečko, R. Improved adaptive fuzzy backstepping control of a magnetic levitation system based on symbiotic organism search. Appl. Soft Comput. 2017, 56, 19–33. [Google Scholar] [CrossRef]
- Sun, Y.; Li, W.; Xu, J.; Qiang, H.; Chen, C. Nonlinear dynamic modeling and fuzzy sliding-mode controlling of electromagnetic levitation system of low-speed MAGLEV train. J. Vibroeng. 2017, 19, 328–342. [Google Scholar] [CrossRef]
- Wai, R.J.; Lee, J.D. Robust Levitation Control for Linear MAGLEV Rail System Using Fuzzy Neural Network. IEEE Trans. Control Syst. Technol. 2009, 17, 4–14. [Google Scholar]
- Kaloust, J.; Ham, C.; Siehling, J.; Jongekryg, E. Nonlinear robust control design for levitation and propulsion of a MAGLEV system. IET Control Theory Appl. 2004, 151, 460–464. [Google Scholar] [CrossRef]
- Yang, J.; Zolotas, A.; Chen, W.; Michail, K.; Li, S. Robust control of nonlinear MAGLEV suspension system with mismatched uncertainties via DOBC approach. ISA Trans. 2011, 50, 389–396. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Xie, S.; Tang, T. Active Damping-Based Control for Grid-Connected LCL-Filtered Inverter with Injected Grid Current Feedback Only. IEEE Trans. Ind. Electron. 2014, 61, 4746–4758. [Google Scholar] [CrossRef]
- Zou, D.; She, L.; Zhang, Z.; Chang, W. MAGLEV system controller design based on the feedback linearization methods. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008. [Google Scholar]
- Li, J.; Li, J.; Cui, P. Mass adaptation of MAGLEV levitation system based on feedback linearization. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-K. Nonlinear Position Stabilizing Control with Active Damping Injection Technique for Magnetic Levitation Systems. Electronics 2019, 8, 221. https://doi.org/10.3390/electronics8020221
Kim S-K. Nonlinear Position Stabilizing Control with Active Damping Injection Technique for Magnetic Levitation Systems. Electronics. 2019; 8(2):221. https://doi.org/10.3390/electronics8020221
Chicago/Turabian StyleKim, Seok-Kyoon. 2019. "Nonlinear Position Stabilizing Control with Active Damping Injection Technique for Magnetic Levitation Systems" Electronics 8, no. 2: 221. https://doi.org/10.3390/electronics8020221
APA StyleKim, S.-K. (2019). Nonlinear Position Stabilizing Control with Active Damping Injection Technique for Magnetic Levitation Systems. Electronics, 8(2), 221. https://doi.org/10.3390/electronics8020221