Robust Control of Heterogeneous Vehicular Platoon with Non-Ideal Communication



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Description
2.1. Notations and Definitions
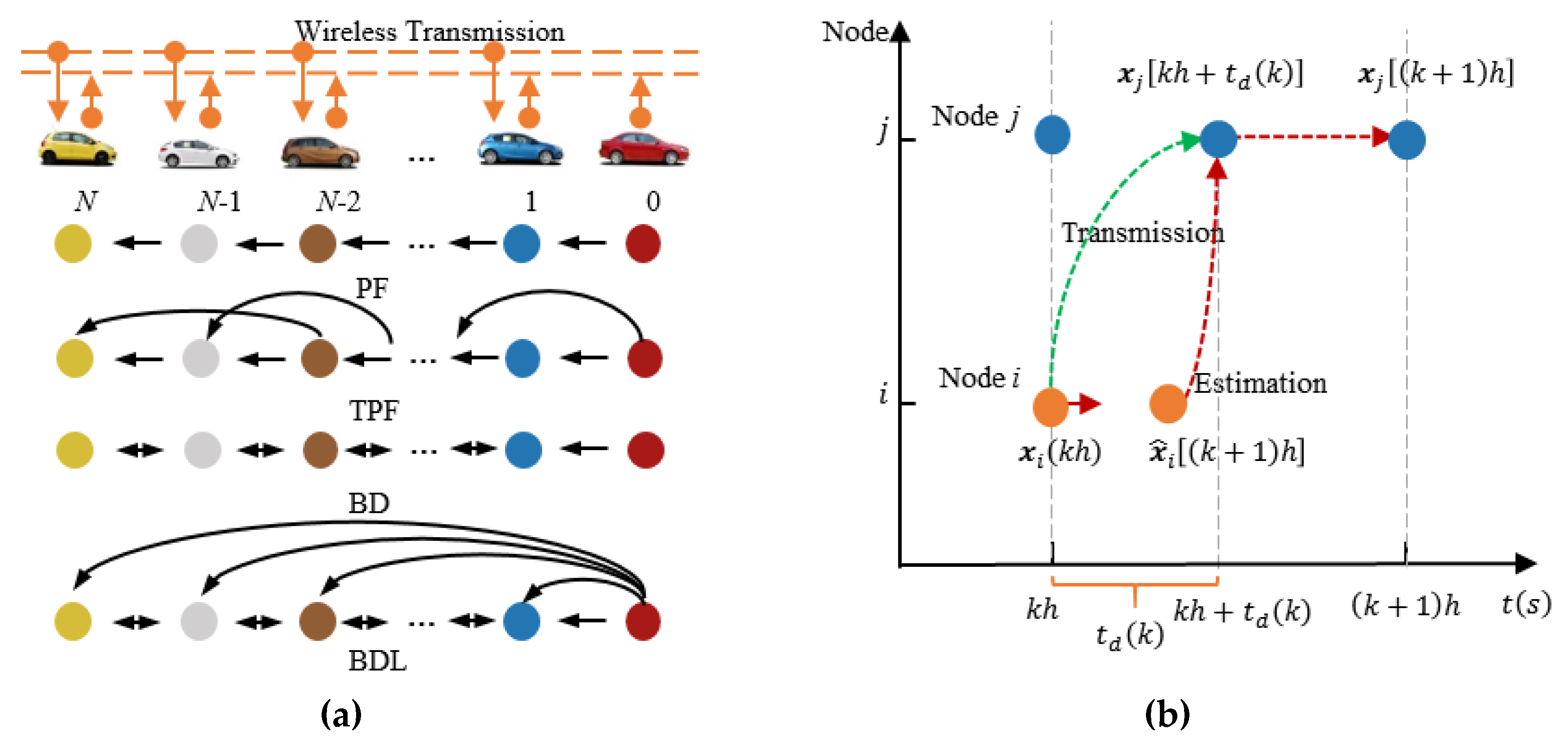
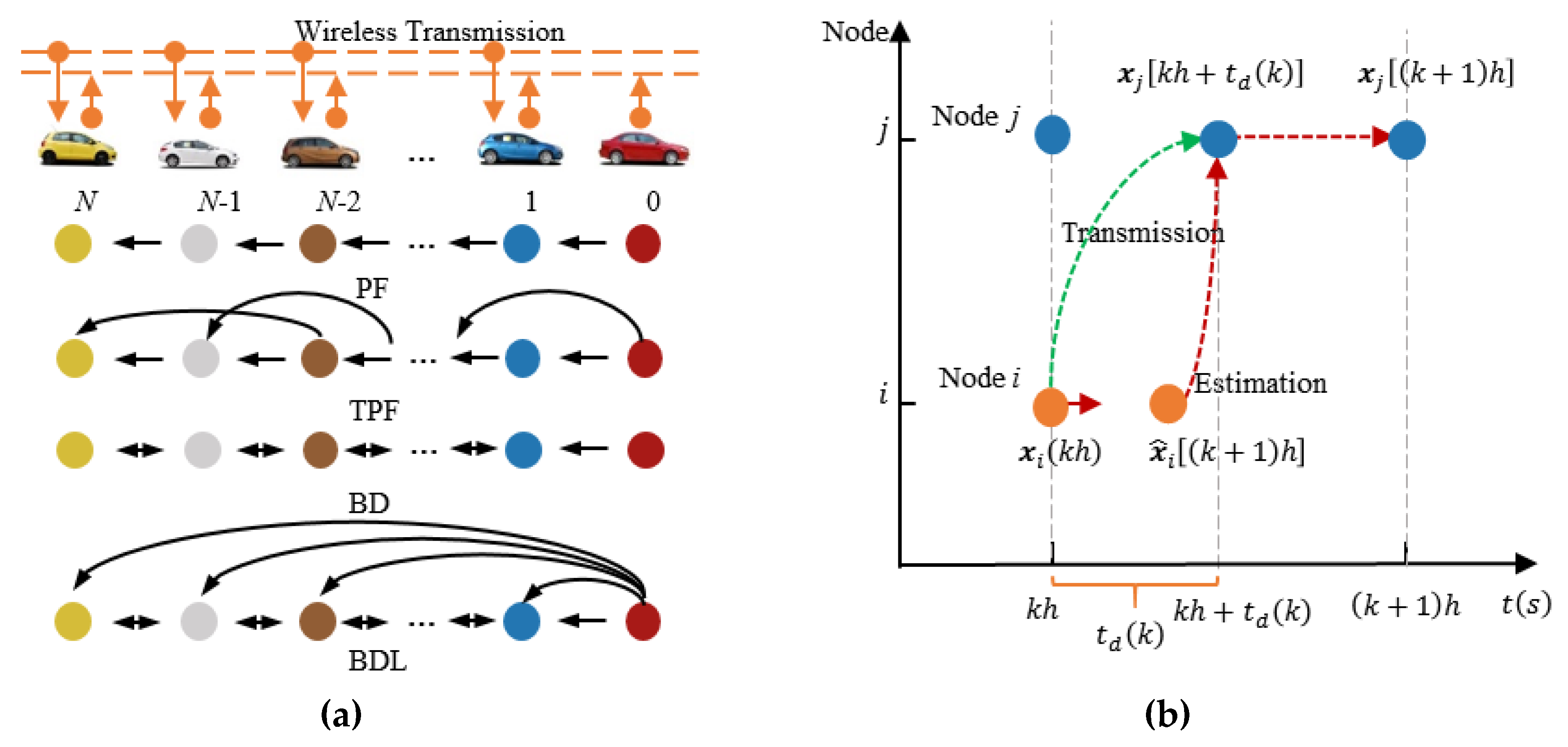
2.2. Problem Analysis Caused by V2V
3. Closed-Loop Dynamical Model of Platoon
3.1. Vehicle Dynamical Model
3.2. Topology of Information Flow
3.3. Closed-Loop Dynamical Function of Platoon
4. Synthesis of Robust Control System for Platooning
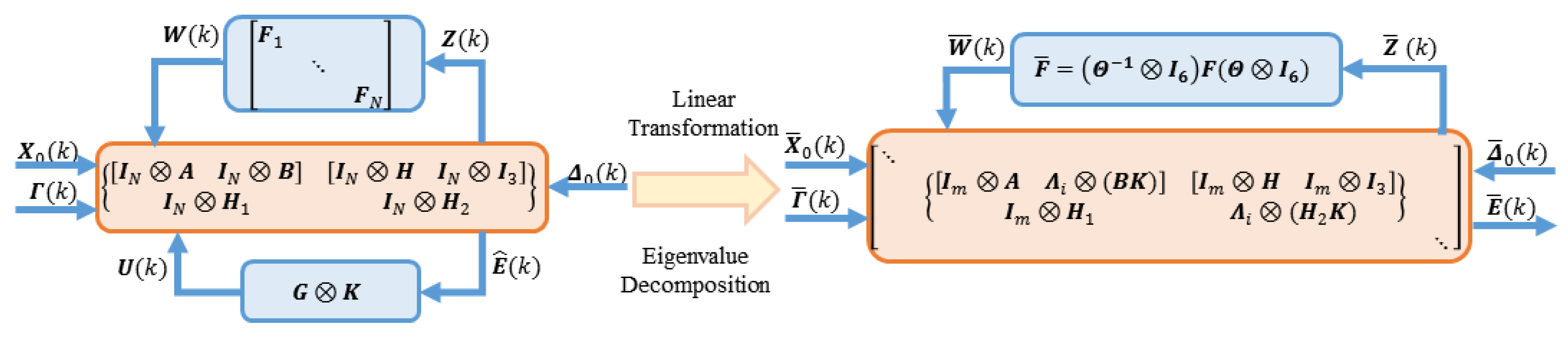
4.1. Topological Decoupling of Closed-Loop Platoon System
4.2. Numerical Design of State Feedback Controller
5. Closed Loop Performance Analysis
5.1. Internal Stability
5.2. Numerical Analysis
6. Simulation and Discussion
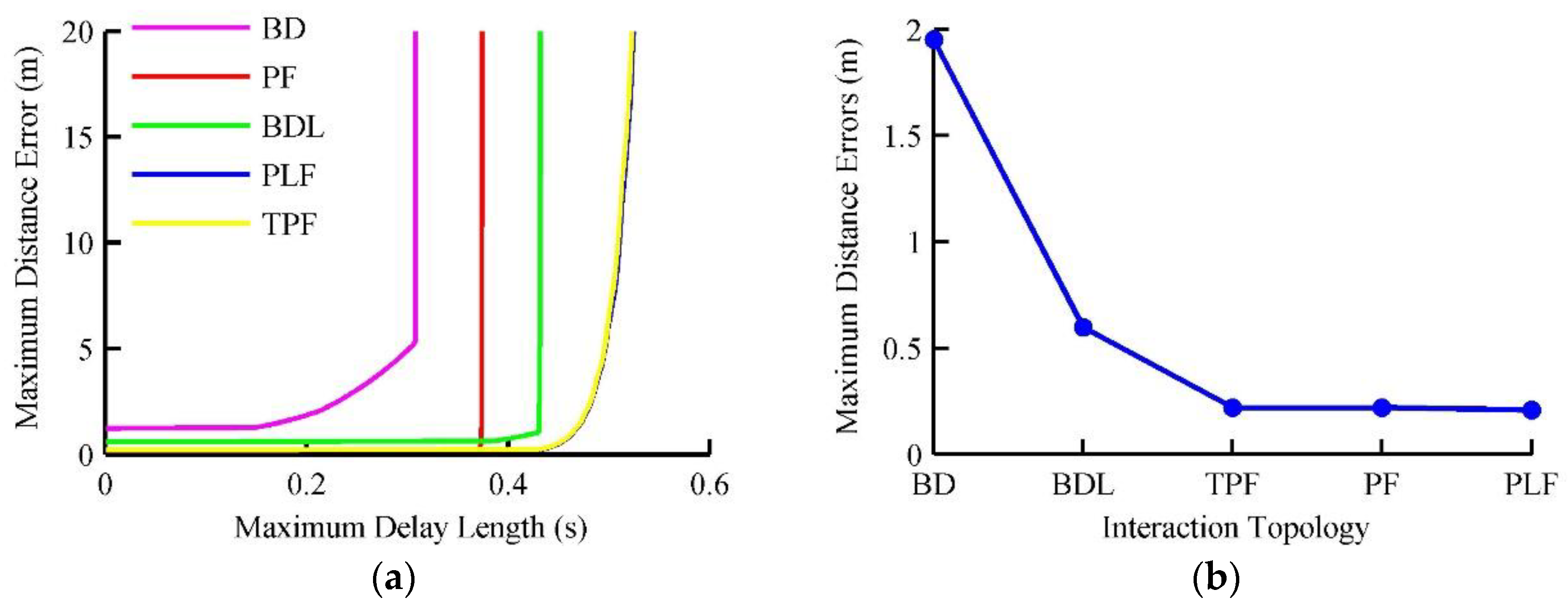
6.1. Delay Bound under Different Topologies
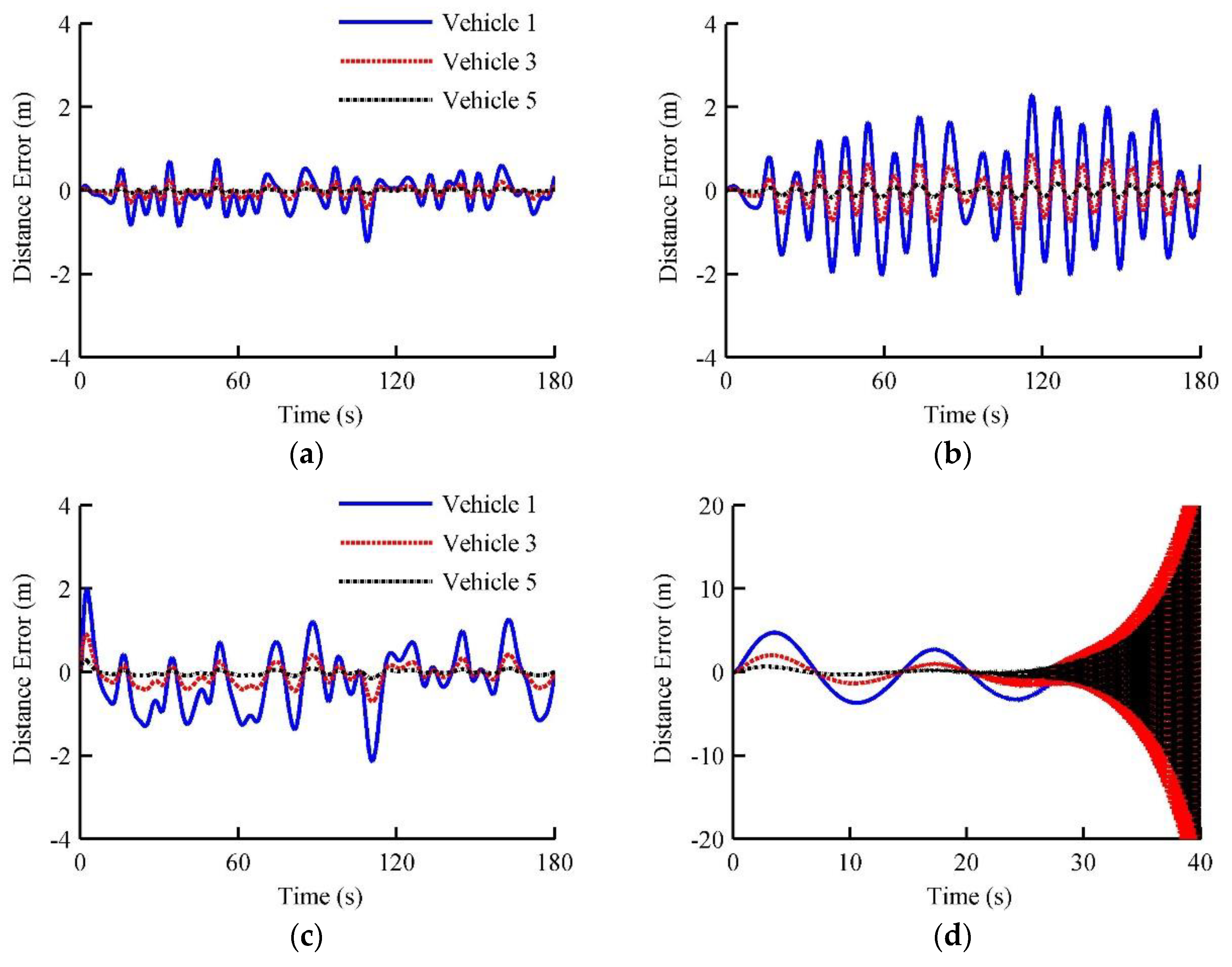
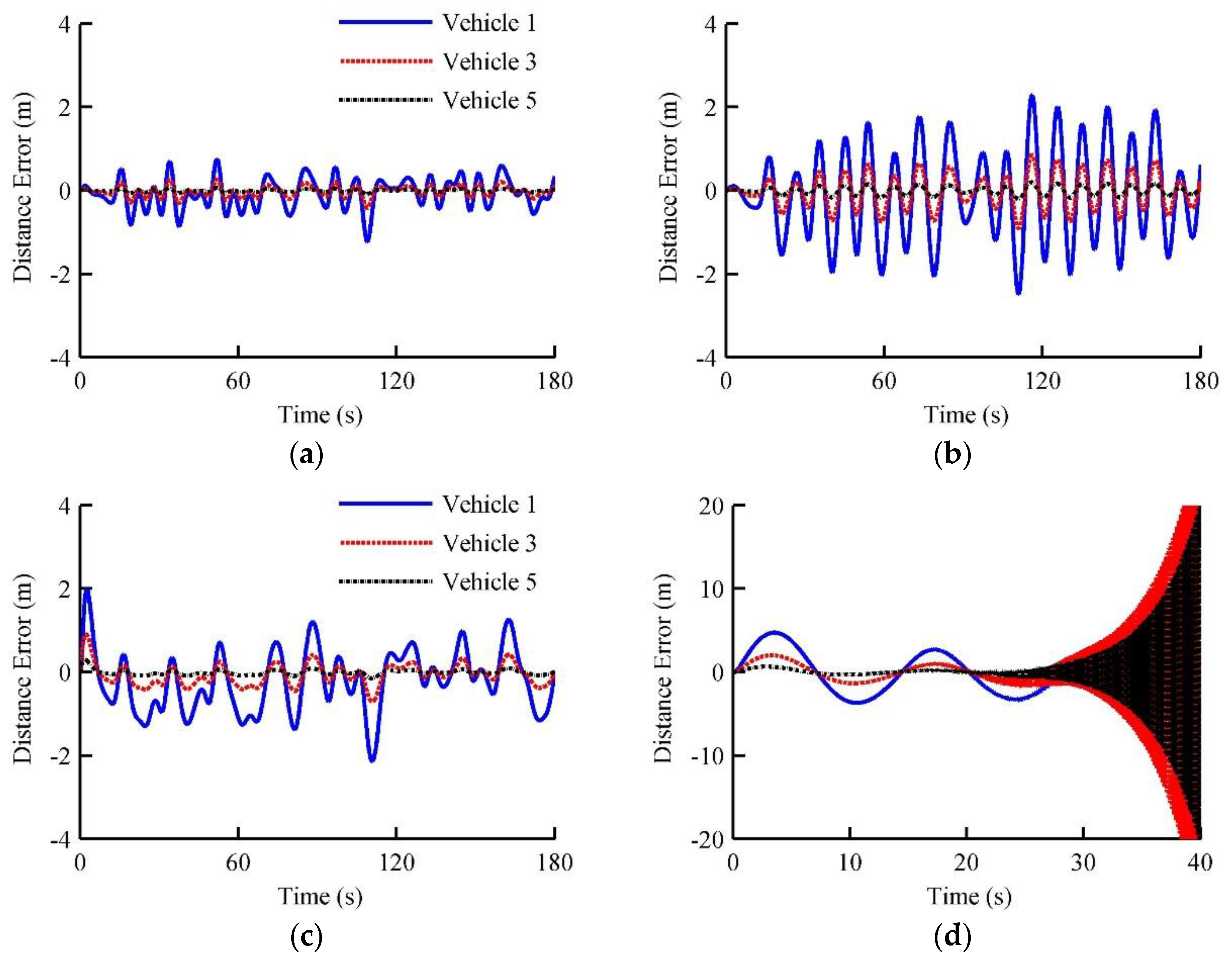
6.2. Comparison of Stability Performance
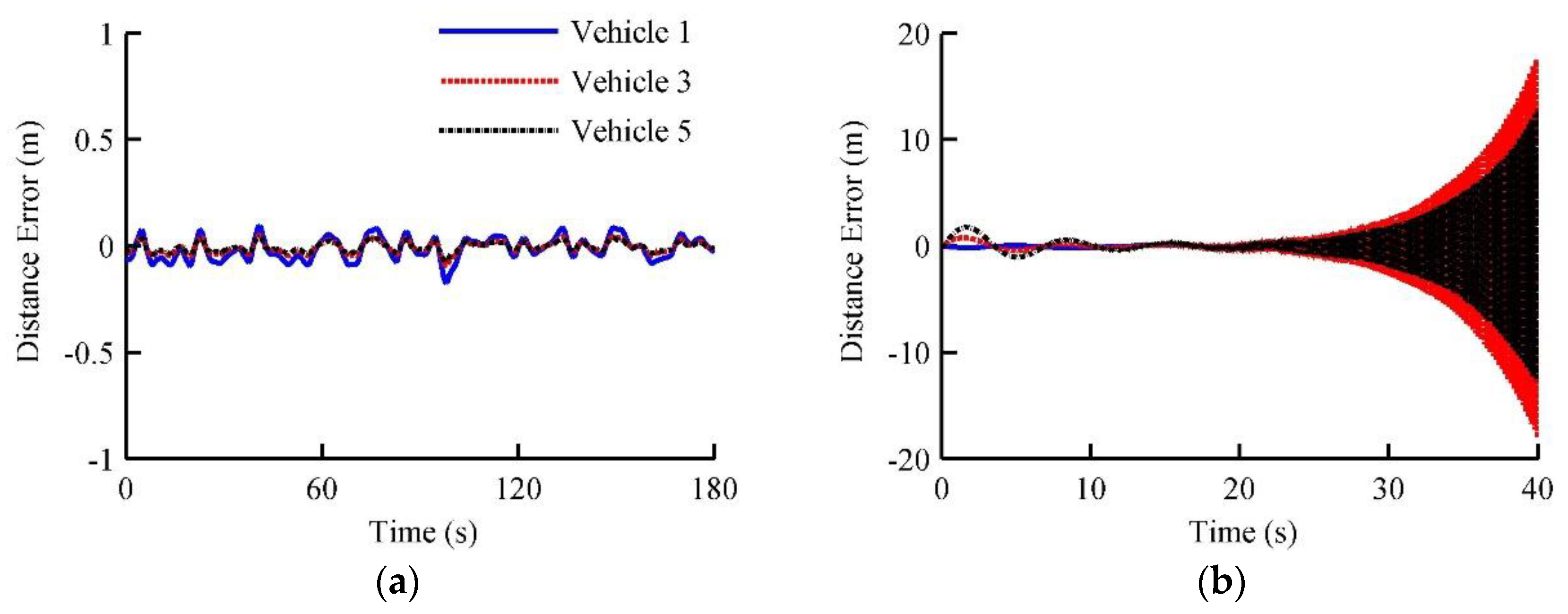
6.3. Robustness Performance Analysis
7. Conclusions
- Both information delay and topological uncertainty caused by non-ideal wireless communication are critical to the stability and tracking performances of platoon, which need to be dealt with when synthesizing a platoon control system;
- When considering the information delay, besides the minimum topological eigenvalue the maximum one also affects the closed loop performance of platoon. And comparatively, the influence of minimum one can be ignored if only stability is taken into account.
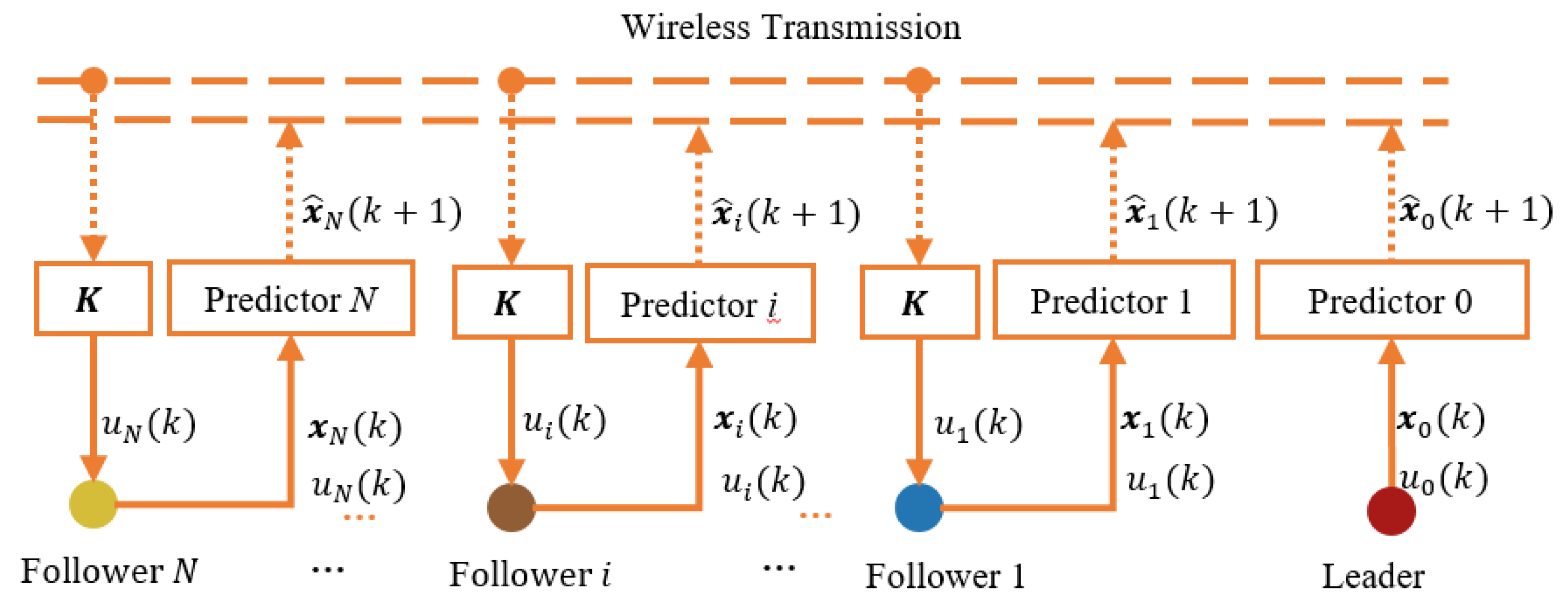
- The proposed state predictor based control strategy can compensate for the information delay and the numerical approach based on LMI can find the required state feedback controller ensuring robust performance of platoon.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Banister, D.; Anderton, K.; Bonilla, D.; Givoni, M.; Schwanen, T. Transportation and the Environment. Soc. Sci. Elect. Pub. 2011, 36, 9–12. [Google Scholar] [CrossRef]
- Li, S.; Li, R.; Wang, J.; Hu, X.; Cheng, B.; Li, K. Stabilizing Periodic Control of Automated Vehicle Platoon with Minimized Fuel Consumption. IEEE Trans. Transp. Electr. 2017, 3, 259–271. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Choi, S.B. Direct adaptive longitudinal control of vehicle platoons. IEEE Trans. Veh. Technol. 2001, 50, 150–161. [Google Scholar] [CrossRef]
- Kunze, R.; Ramakers, R.; Henning, K.; Jeschke, S. Organization and Operation of Electronically Coupled Truck Platoons on German Motorways. In Proceedings of the International Conference on Intelligent Robotics and Applications (ICIRA 2009), Singapore, 16–18 December 2009; pp. 135–146. [Google Scholar]
- Shladover, S.E.; Desoer, C.A.; Hedrick, J.K.; Tomizuka, M.; Walrand, J.; Zhang, W.B.; Mckeown, N. Automated vehicle control developments in the PATH program. IEEE Trans. Veh. Technol. 2002, 40, 114–130. [Google Scholar] [CrossRef]
- Tsugawa, S.; Kato, S.; Aoki, K. An automated truck platoon for energy saving. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4109–4114. [Google Scholar]
- Kim, D.J.; Park, K.H.; Bien, Z. Hierarchical Longitudinal Controller for Rear-End Collision Avoidance. IEEE Trans. Ind. Elect. 2007, 54, 805–817. [Google Scholar] [CrossRef]
- Li, S.B.; Gao, F.; Cao, D.; Li, K. Multiple-model switching control of vehicle longitudinal dynamics for platoon level automation. IEEE Trans. Veh. Technol. 2016, 65, 4480–4492. [Google Scholar] [CrossRef]
- Caravani, P.; Santis, E.D.; Graziosi, F.; Panizzi, E. Communication Control and Driving Assistance to a Platoon of Vehicles in Heavy Traffic and Scarce Visibility. IEEE Trans. Intell. Transp. 2006, 7, 448–460. [Google Scholar] [CrossRef]
- Liu, B.; Jia, D.; Lu, K.; Dong, N.; Wang, J.; Wu, L. A Joint Control-Communication Design for Reliable Vehicle Platooning in Hybrid Traffic. IEEE Trans. Veh. Technol. 2017, 66, 9394–9409. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Wang, L.Y. Stability Margin Improvement of Vehicular Platoon Considering Undirected Topology and Asymmetric Control. IEEE Trans. Control Syst. Technol. 2016, 24, 1253–1265. [Google Scholar] [CrossRef]
- Xia, Q.; Gao, F.; Duan, J.; He, Y. Decoupled H-inf Control of Automated Vehicular Platoons with Complex Interaction Topologies. IET Intell. Transp. Syst. 2017, 11, 92–101. [Google Scholar] [CrossRef]
- Rödönyi, G. An Adaptive Spacing Policy Guaranteeing String Stability in Multi-Brand Ad Hoc Platoons. IEEE Trans. Intell. Transp. 2017, 19, 1902–1912. [Google Scholar] [CrossRef]
- Sakoda, K. Wireless communication apparatus, communication system, wireless communication apparatus control method and program. Commun. Mag. 2017, 97, 1–9. [Google Scholar]
- Yang, N.; Wang, L.; Geraci, G.; Elkashlan, M. Safeguarding 5G wireless communication networks using physical layer security. Commun. Magaz. 2015, 53, 20–27. [Google Scholar] [CrossRef]
- Liu, X.; Goldsmith, A.; Mahal, S.S.; Hedrick, J.K. Effects of communication delay on string stability in vehicle platoons. In Proceedings of the Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001; pp. 625–630. [Google Scholar]
- Ghasemi, A.; Kazemi, R.; Azadi, S. Stable Decentralized Control of a Platoon of Vehicles with Heterogeneous Information Feedback. IEEE Trans. Veh. Technol. 2013, 62, 4299–4308. [Google Scholar] [CrossRef]
- Alam, A.; Gattami, A.; Johansson, K.H.; Tomlin, C.J. Guaranteeing safety for heavy duty vehicle platooning: Safe set computations and experimental evaluations. Control Eng. Pract. 2014, 24, 33–41. [Google Scholar] [CrossRef]
- Gao, F.; Hu, X.; Li, S.B.; Li, K.; Sun, Q. Distributed adaptive sliding mode control of vehicular platoon with uncertain interaction topology. IEEE Trans. Ind. Electron. 2018, 65, 6352–6361. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Caveney, D.S. Distributed Receding Horizon Control of Vehicle Platoons: Stability and String Stability. IEEE Trans. Autom. Control 2012, 57, 620–633. [Google Scholar] [CrossRef]
- Lestas, I.; Vinnicombe, G. Scalable Robustness for Consensus Protocols with Heterogeneous Dynamics. IFAC Proc. Vol. 2005, 38, 185–190. [Google Scholar] [CrossRef]
- Young, G.F.; Scardovi, L.; Leonard, N.E. Robustness of noisy consensus dynamics with directed communication. In Proceedings of the American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6312–6317. [Google Scholar]
- Zheng, Y.; Li, S.E.; Wang, J.; Cao, D.; Li, K. Stability and Scalability of Homogeneous Vehicular Platoon: Study on the Influence of Information Flow Topologies. IEEE Trans. Intell. Transp. 2015, 17, 14–26. [Google Scholar] [CrossRef]
- Peters, A.A.; Middleton, R.H.; Mason, O. Leader tracking in homogeneous vehicle platoons with broadcast delays. Automatica 2014, 50, 64–74. [Google Scholar] [CrossRef]
- Gong, J.; Zhao, Y.; Lu, Z. Sampled-data vehicular platoon control with communication delay. Syst. Control Eng. 2017, 232, 39–49. [Google Scholar] [CrossRef]
- Gao, F.; Li, S.E.; Zheng, Y.; Kum, D. Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay. IET Intel. Transp. Syst. 2016, 10, 503–513. [Google Scholar] [CrossRef]
- Bernardo, M.D.; Salvi, A.; Santini, S. Distributed Consensus Strategy for Platooning of Vehicles in the Presence of Time-Varying Heterogeneous Communication Delays. IEEE Trans. Intell. Transp. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Narasimha, M.; Desai, V.; Calcev, G.; Xiao, W.; Sartori, P.; Soong, A. Performance Analysis of Vehicle Platooning Using a Cellular Network. In Proceedings of the Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Campolo, C.; Molinaro, A.; Araniti, G.; Berthet, A. Better Platooning Control Toward Autonomous Driving: An LTE Device-to-Device Communications Strategy That Meets Ultralow Latency Requirements. IEEE Veh. Technol. Mag. 2017, 12, 30–38. [Google Scholar] [CrossRef]
- Masini, B.; Bazzi, A.; Zanella, A. A Survey on the Roadmap to Mandate on Board Connectivity and Enable V2V-Based Vehicular Sensor Networks. Sensors 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Gao, F.; Li, S.B.; Zheng, Y.; Gao, H. Robust cooperation of connected vehicle systems with eigenvalue-bounded interaction topologies in the presence of uncertain dynamics. Front. Mech. Eng. 2018, 13, 354–367. [Google Scholar] [CrossRef]
- Gao, F.; Li, S.E.; Kum, D.; Zhang, H. Synthesis of multiple model switching controllers using H∞ theory for systems with large uncertainties. Neurocomputing 2015, 157, 118–124. [Google Scholar] [CrossRef]
- Jury, E.I. A Simplified Stability Criterion for Linear Discrete Systems. Proc. IRE 1962, 50, 1493–1500. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Gao, F.; He, Y.; Wang, C. Robust Control of Heterogeneous Vehicular Platoon with Non-Ideal Communication. Electronics 2019, 8, 207. https://doi.org/10.3390/electronics8020207
Liu B, Gao F, He Y, Wang C. Robust Control of Heterogeneous Vehicular Platoon with Non-Ideal Communication. Electronics. 2019; 8(2):207. https://doi.org/10.3390/electronics8020207
Chicago/Turabian StyleLiu, Bao, Feng Gao, Yingdong He, and Caimei Wang. 2019. "Robust Control of Heterogeneous Vehicular Platoon with Non-Ideal Communication" Electronics 8, no. 2: 207. https://doi.org/10.3390/electronics8020207
APA StyleLiu, B., Gao, F., He, Y., & Wang, C. (2019). Robust Control of Heterogeneous Vehicular Platoon with Non-Ideal Communication. Electronics, 8(2), 207. https://doi.org/10.3390/electronics8020207