Improved RMS Delay Spread Estimation for mmWave Channels Using Savitzky–Golay Filters

 , ,
, ,  and
and
Abstract
1. Introduction
2. Channel Parameter Estimation from CTF Magnitude
2.1. Channel Model and Parameter Estimation Method
2.2. Noise Influence on Parameter Estimation Accuracy
2.3. Savitzky–Golay (S-G) Filter
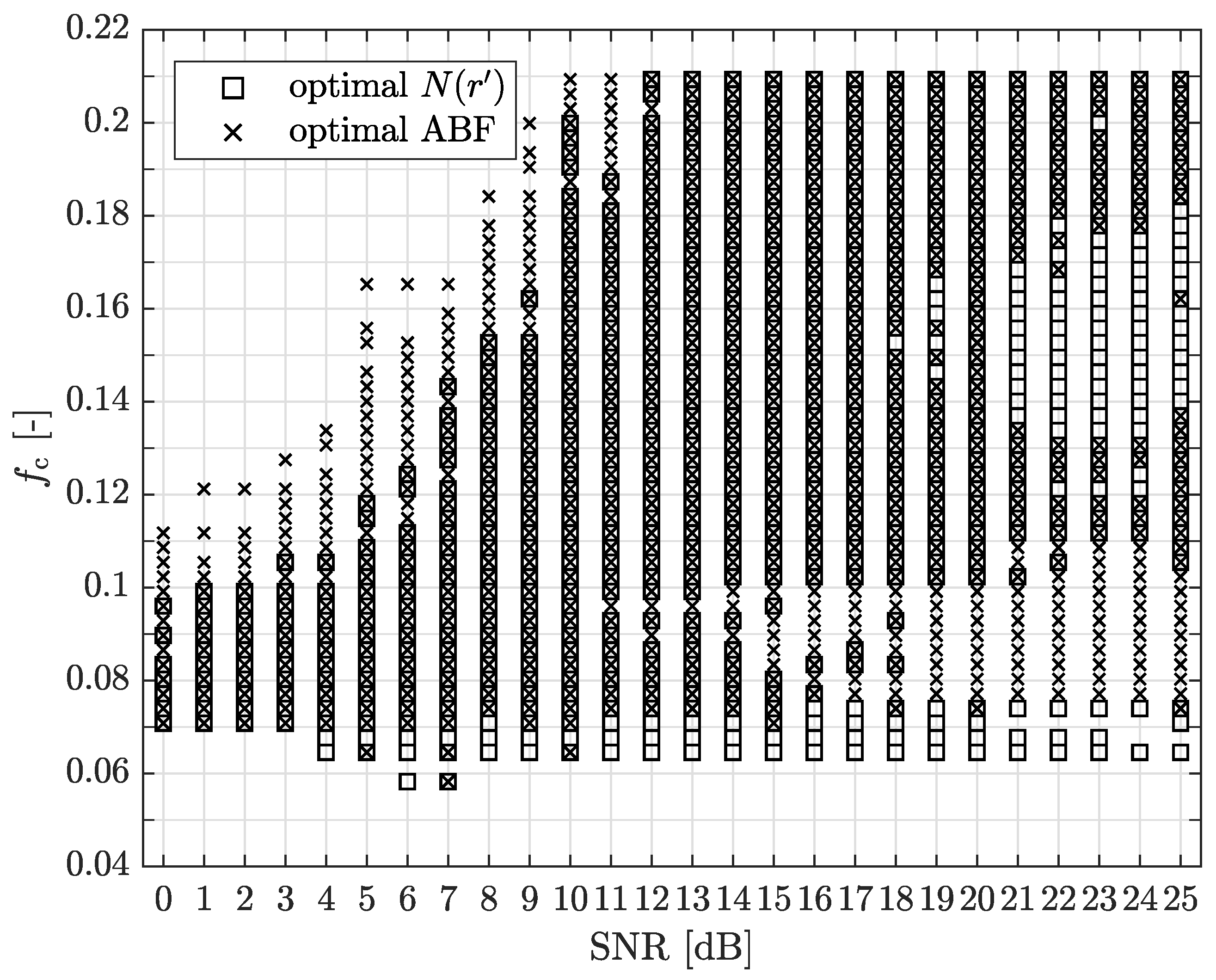
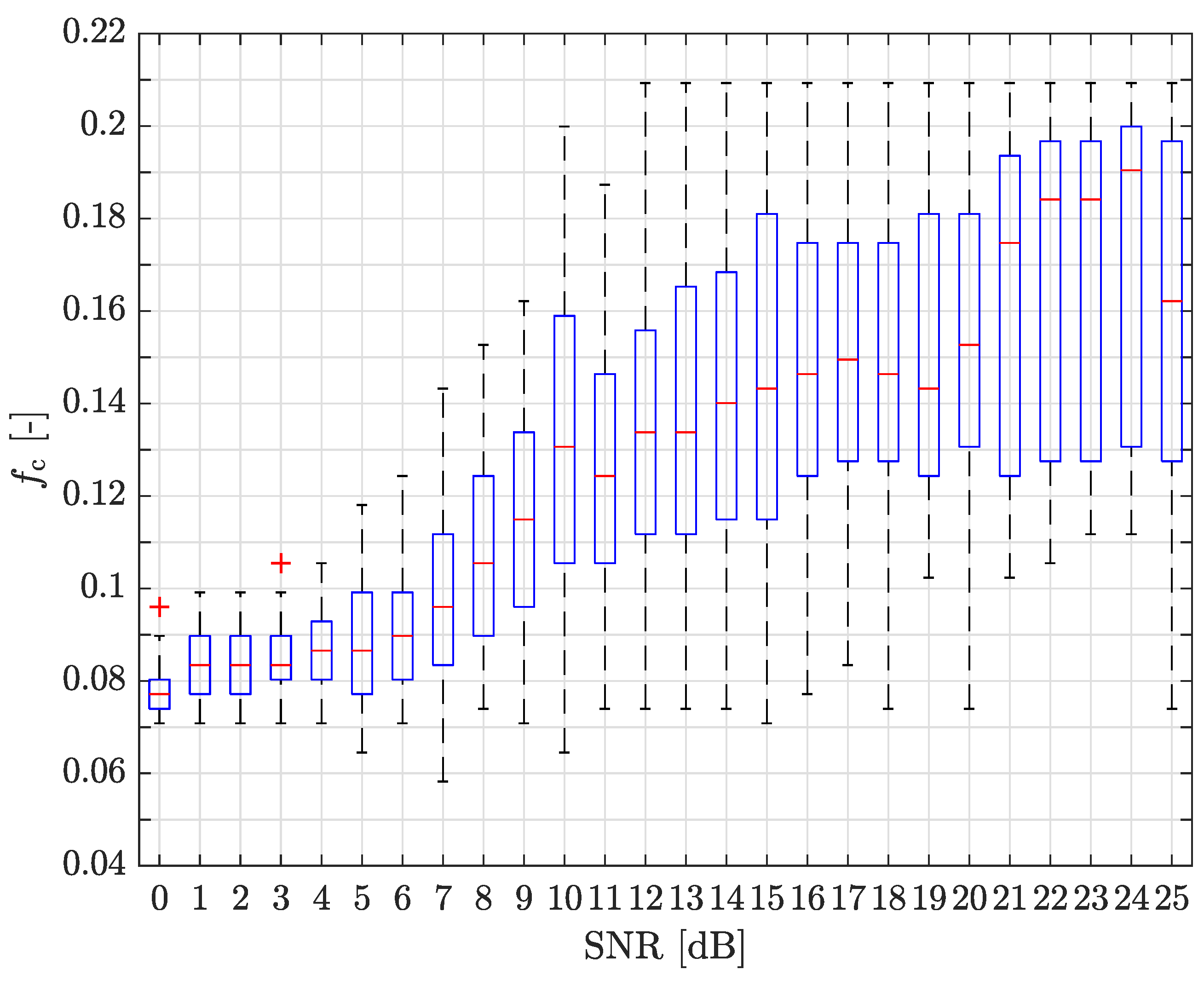
2.4. Optimal S-G Cut-Off Frequency for Application on Noisy CTF Magnitude
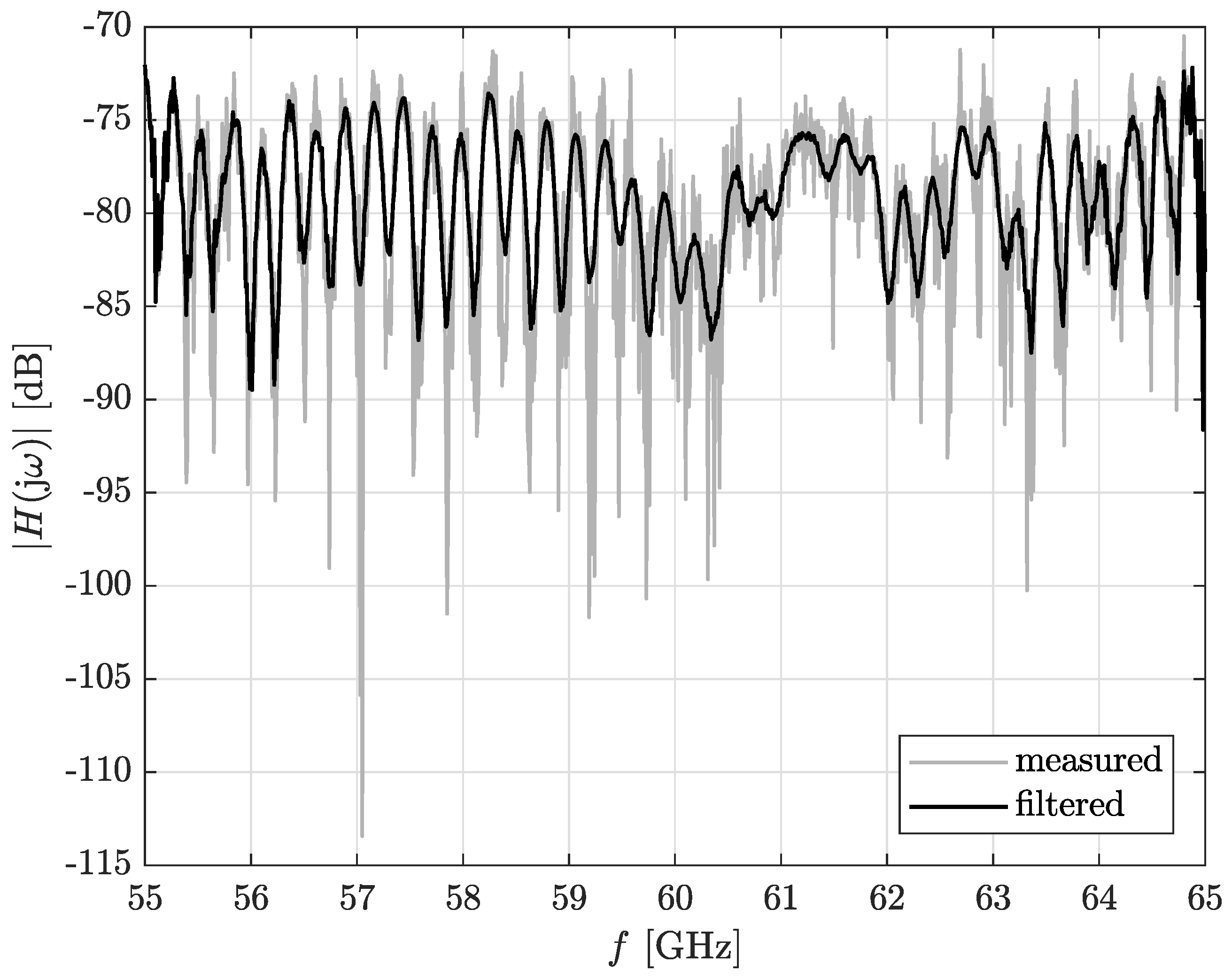
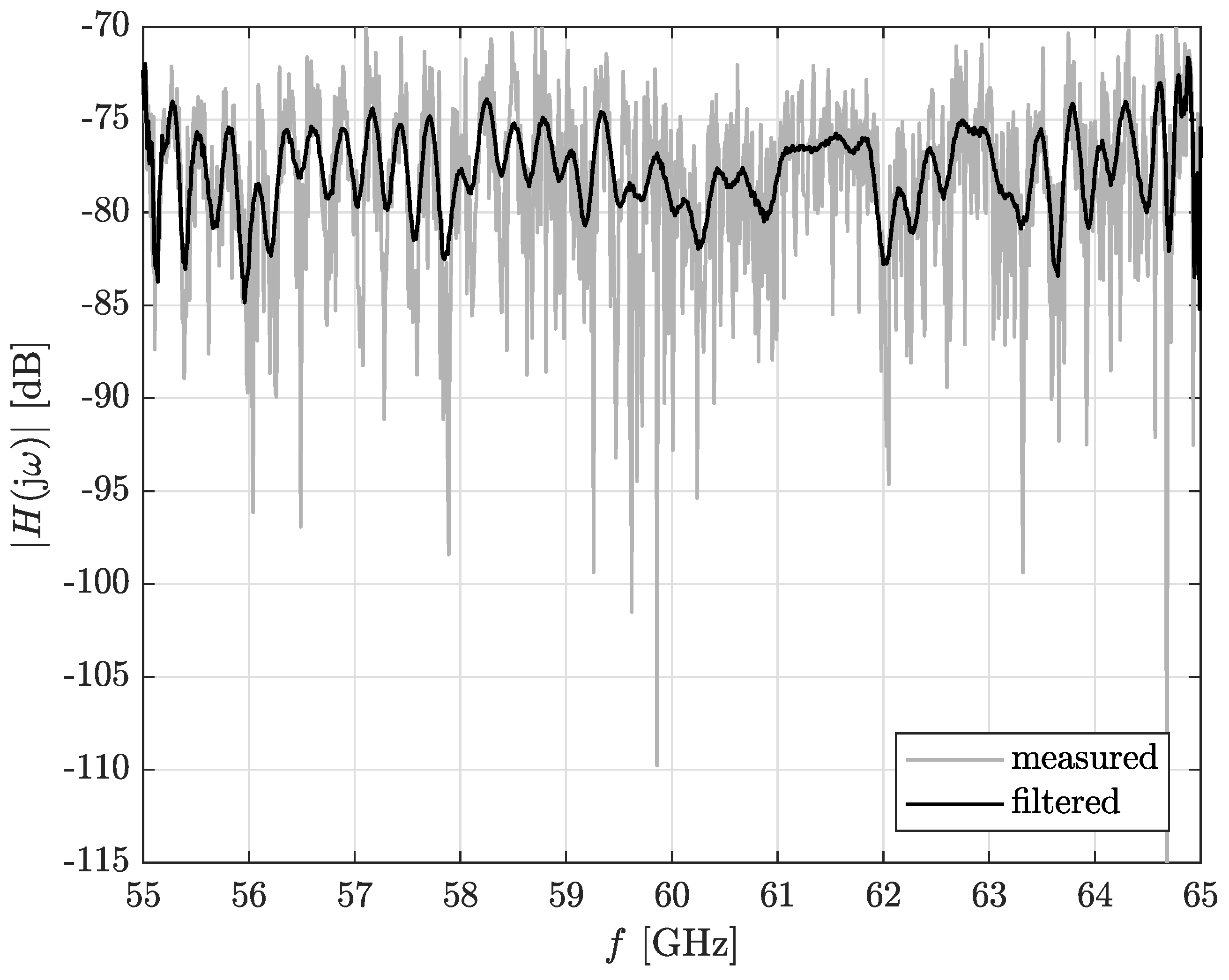
3. Application of the Savitzky–Golay Filter to the Measured CTF
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RMS | root mean square |
| CTF | Channel Transfer Function |
| S-G filter | Savitzky–Golay filter |
| SNR | Signal-to-Noise Ratio |
| 5G | The fifth-generation networks |
| RF | Radio Frequency |
| mmWave | millimeter wave |
| OFDM | Orthogonal Frequency Division Multiplexing |
| PDP | Power Delay Profile |
| CIR | Channel Impulse Response |
| VNA | Vector Network Analyzer |
| IFFT | Inverse Fast Fourier Transform |
| TX | transmitter |
| RX | receiver |
| V2V | Vehicle-to-Vehicle |
| LCR | Level Crossing Rate |
| LOS | Line-of-Sight |
| NLOS | Non-Line-of-Sight |
| FD | frequency domain |
| ABF | Average Bandwidth Of Fades |
| CDF | Cumulative Distribution Function |
| AWGN | Additive White Gaussian Noise |
| MSE | Mean Squared Error |
| TWDP | Two-wave channel model with diffuse power fading |
References
- Molisch, A.F. Statistical properties of the RMS delay-spread of mobile radio channels with independent Rayleigh fading paths. IEEE Trans. Veh. Technol. 1996, 45, 201–204. [Google Scholar] [CrossRef]
- Witrisal, K. On estimating the RMS delay spread from the frequency-domain level crossing rate. IEEE Commun. Lett. 2001, 5, 287–289. [Google Scholar] [CrossRef]
- Chandra, A.; Prokes, A.; Mikulasek, T.; Blumenstein, J.; Kukolev, P.; Zemen, T.; Mecklenbrauker, C.F. Frequency-domain in-vehicle UWB channel modeling. IEEE Trans. Veh. Technol. 2016, 65, 3929–3940. [Google Scholar] [CrossRef]
- Muquet, B.; Wang, Z.; Giannakis, G.B.; De Courville, M.; Duhamel, P. Cyclic prefix or zero padding for wireless multicarrier transmissions? IEEE Trans. Commun. 2002, 50, 2136–2148. [Google Scholar] [CrossRef]
- Molisch, A.F. Wireless Communications, 2nd ed.; John Wiley and Sons: Chichester, UK, 2011. [Google Scholar]
- Flikkema, P.G.; Johnson, S.G. A comparison of time- and frequency-domain wireless channel sounding techniques. In Proceedings of the SOUTHEASTCON’96, Tampa, FL, USA, 11–14 April 1996; pp. 488–491. [Google Scholar]
- Witrisal, K.; Kim, Y.-H.; Prasad, R. RMS delay spread estimation technique using non-coherent channel measurements. Electron. Lett. 1998, 34, 1918–1919. [Google Scholar] [CrossRef]
- Witrisal, K.; Bohdanowicz, A. Influence of noise on a novel RMS delay spread estimation method. In Proceedings of the 11th IEEE International Symposium on Personal Indoor and Mobile Radio Communications PIMRC, London, UK, 18–21 September 2000; pp. 560–566. [Google Scholar]
- Bohdanowicz, A.; Janssen, G.J.M.; Pietrzyk, S. Wideband indoor and outdoor multipath channel measurements at 17 GHz. In Proceedings of the IEEE VTS 50th Vehicular Technology Conference (VTC 1999-Fall), Amsterdam, The Netherlands, 19–22 September 1999; pp. 1998–2003. [Google Scholar]
- Prokes, A.; Mikulasek, T.; Blumenstein, J.; Vychodil, J. Usability of Hilbert transform for complex channel transfer function calculation in 60 GHz band. In Proceedings of the Progress in Electromagnetics Research Symposium—Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 2945–2951. [Google Scholar]
- Savitzky, A.; Golay, M.J.E. Smoothing and differentation of data by simplified least squares procedures. Analy. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Krishnan, S.R.; Seelamantula, C.S. On the selection of optimum Savitzky-Golay filters. IEEE Trans. Signal Process. 2013, 61, 380–391. [Google Scholar] [CrossRef]
- Zöchmann, E.; Hofer, M.; Lerch, M.; Pratschner, S.; Bernado, L.; Blumenstein, J.; Prokes, A. Position-specific statistics of 60 GHz vehicular channels during overtaking. IEEE Access 2019, 7, 14216–14232. [Google Scholar] [CrossRef]
- Zöchmann, E.; Guan, K.; Rupp, M. Two-ray models in mmWave communications. In Proceedings of the IEEE 18th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Sapporo, Japan, 3–6 July 2017; pp. 1–5. [Google Scholar]
- Chen, Y.; Beaulieu, N.C. Maximum likelihood estimation of the K factor in Ricean fading channels. IEEE Commun. Lett. 2005, 9, 1040–1042. [Google Scholar] [CrossRef]
- Schafer, R.W. What is Savitzky-Golay filter? IEEE Signal Proc. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Evaluating Uncertainty Components: Type A. The NIST Reference on Constants, Units, and Uncertainity. Available online: https://physics.nist.gov/cuu/Uncertainty/typea.html (accessed on 2 November 2019).
- Garcia, D. Robust smoothing of gridded data in one and higher dimensions with missing values. Comp. Stat. Data Anal. 2010, 54, 1167–1178. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Antenna height () | 1.245 m |
| Antenna distance () | 2.100 m |
| Meas. antenna type TX | open waveguide with power amplifier |
| Meas. antenna type RX | open waveguide |
| Antenna gain () | 9 dBi |
| TX amplifier gain () | 35 dB |
| TX cable loss () | 12 dB |
| RX cable loss () | 26 dB |
| VNA intermediate frequency bandwidth () | 100 Hz |
| Frequency range | from 55 GHz to 65 GHz |
| Observed bandwidth | 10 GHz |
| Number of points in frequency domain | 1001 |
| Measured Results without Application of S-G Filter Smoothing | |||||
| Av. | 120.4 | 178.9 | 211.0 | 212.8 | 201.3 |
| 8.8 | 27.5 | 53.9 | 55.7 | 49.0 | |
| ±0.1 ns | ±0.1 ns | ±0.2 ns | ±0.2 ns | ±0.2 ns | |
| 0.4 | 0.5 | 0.6 | 0.6 | 0.5 | |
| ±1.2 MHz | ±0.6 MHz | ±0.4 MHz | ±0.4 MHz | ± 0.4 MHz | |
| Measured Results with Application of S-G Filter Smoothing | |||||
| Av. est. SNR | 13.15 dB | 9.76 dB | 7.78 dB | 6.92 dB | 6.91 dB |
| Av. est. | 0.1344 | 0.1280 | 0.1034 | 0.0953 | 0.0954 |
| Av. | 38.3 | 49.7 | 52.6 | 44.6 | 39.4 |
| Av. | 1.49 ns | 1.47 ns | 1.33 ns | 1.44 ns | 1.80 ns |
| 0.01 | 0.01 | 0.02 | 0.05 | 0.13 | |
| 0.04 | 0.02 | 0.02 | 0.03 | 0.20 | |
| S-G Filter | Lowpass FIR Filter (Equiripple) | ||
|---|---|---|---|
 | = = = = 31 = = |  | = = = = 29 = = |
 | = = = = 29 = = |  | = = = = 62 = = |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miloš, J.; Blumenstein, J.; Prokeš, A.; Mikulášek, T.; Mecklenbräuker, C. Improved RMS Delay Spread Estimation for mmWave Channels Using Savitzky–Golay Filters. Electronics 2019, 8, 1530. https://doi.org/10.3390/electronics8121530
Miloš J, Blumenstein J, Prokeš A, Mikulášek T, Mecklenbräuker C. Improved RMS Delay Spread Estimation for mmWave Channels Using Savitzky–Golay Filters. Electronics. 2019; 8(12):1530. https://doi.org/10.3390/electronics8121530
Chicago/Turabian StyleMiloš, Jiří, Jiří Blumenstein, Aleš Prokeš, Tomáš Mikulášek, and Christoph Mecklenbräuker. 2019. "Improved RMS Delay Spread Estimation for mmWave Channels Using Savitzky–Golay Filters" Electronics 8, no. 12: 1530. https://doi.org/10.3390/electronics8121530
APA StyleMiloš, J., Blumenstein, J., Prokeš, A., Mikulášek, T., & Mecklenbräuker, C. (2019). Improved RMS Delay Spread Estimation for mmWave Channels Using Savitzky–Golay Filters. Electronics, 8(12), 1530. https://doi.org/10.3390/electronics8121530