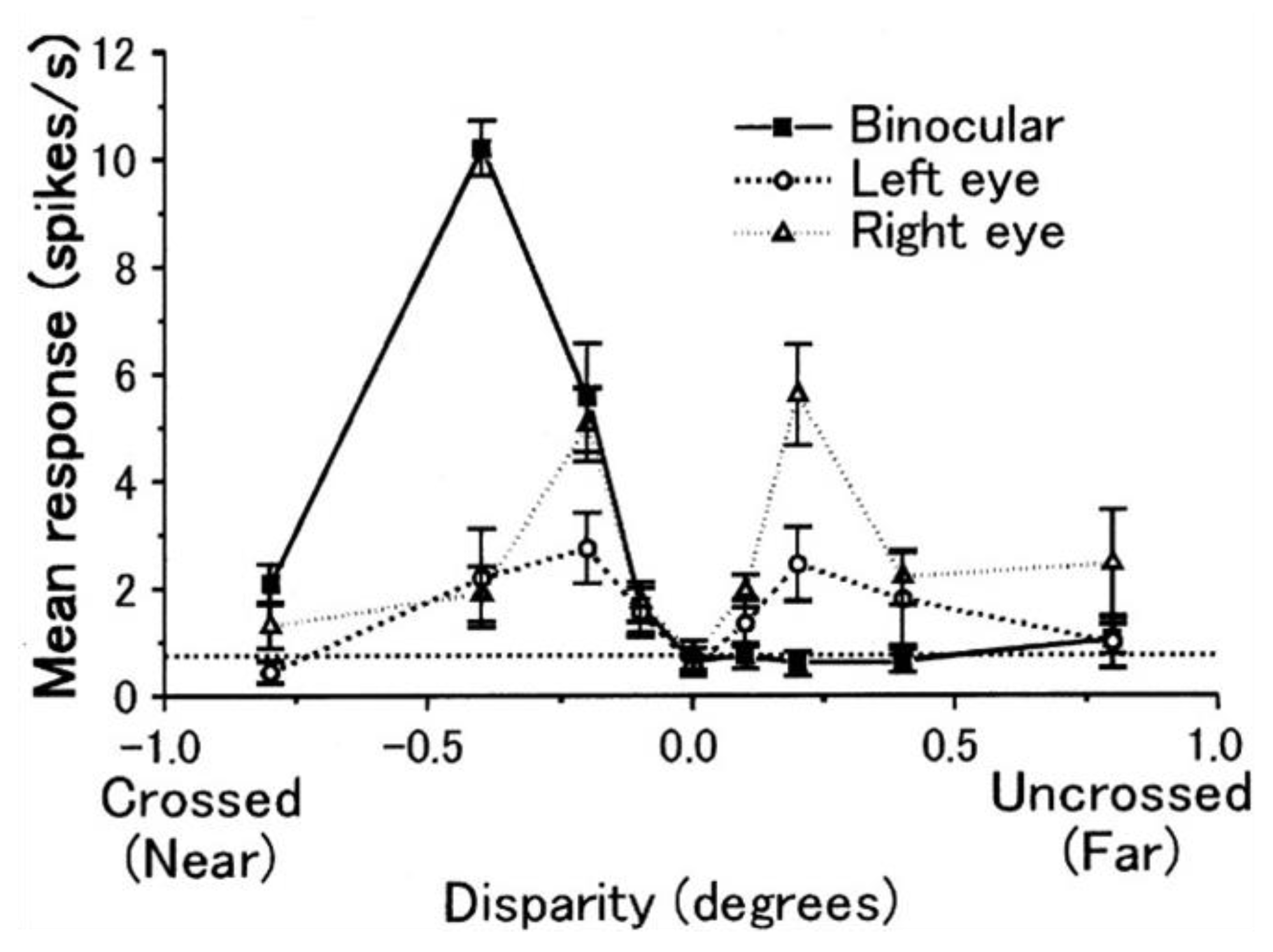
The distance estimation system is based on the study explained in the introduction section, using specialized neuron populations to distinguish between near and distant objects from the binocular system.
To achieve this goal, and due to the above explanation, the projective space of both retinas is split into horizontal stripes, with each one representing a neuron population specialized in a particular projective space. Thanks to this specialization, each neuron population is focused on obtaining the disparities exclusively in its corresponding area, eliminating the noise caused by the other stripes and, thus, obtaining a more accurate distance estimation inside their space.
2.2.1. Global Disparity Calculation
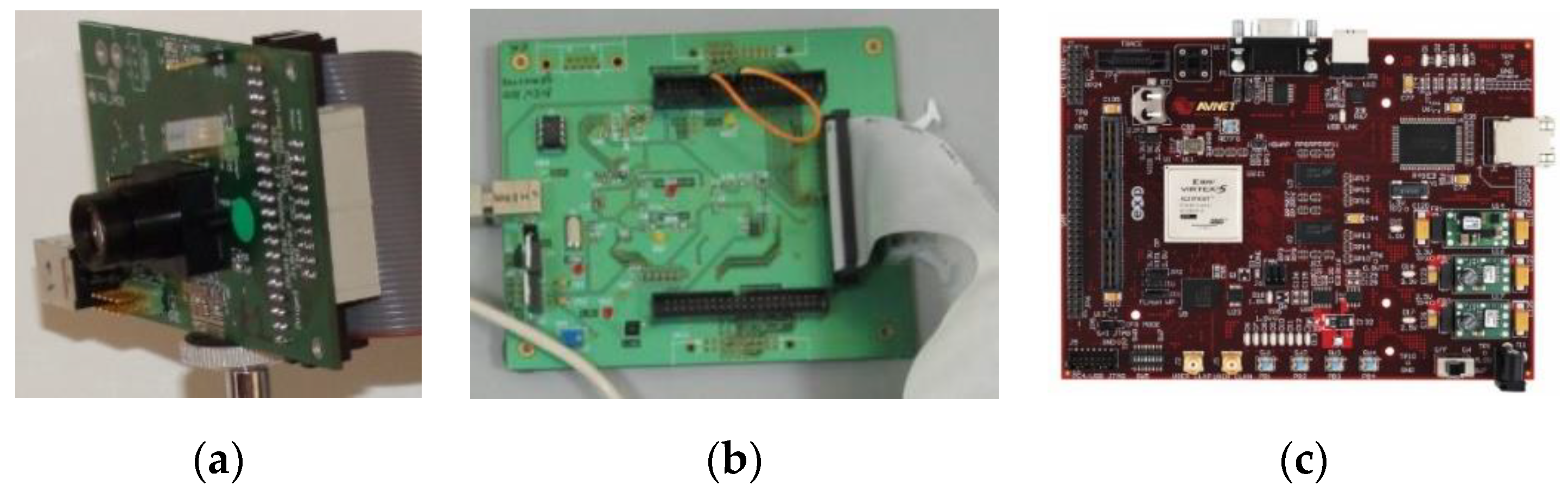
At this point, all the hardware components and their calibration have been presented, and then, the distance estimation process is explained next. Summarizing, and emphasizing on what has been explained before, this mechanism consists of obtaining the disparity map of the scene, which is based on the subtractive fusion of the projection from both retinas.
However, spiking vision systems do not provide information in the same way as conventional cameras do: while traditional cameras give information about the scene in static frames (that codify the information during a particular period of time), spiking sensors provide brightness variations of the scene (movements) for each pixel asynchronously (without integrating the information in frames like conventional cameras do). Hence, the information from each retina corresponds to a spike flow with information that is codified as pixel addresses (x and y coordinates) and their corresponding spiking rate (intensity of the variation); but this information is transmitted without following a specific order—that is, asynchronously.
The main difficulty of this processing system is finding a mechanism capable of performing the subtraction operation between two spiking signals. Regarding this problem, Jiménez-Fernández [
21] provided the basic building blocks to operate with spiking signals. In that study, some basic components implemented in Hardware Description Language (HDL) were developed, which form the so-called “spiking algebra”. Among these essential components, the “Hold&Fire” block (H&F) is included, with behavior that is equivalent to a spiking signal subtractor.
This block consists of two inputs (signals to be subtracted) and one output (subtraction result). Every time a new spike arrives, it is stored internally, waiting for the evolution of the inputs for a fixed amount of time (hold time). If no spike arrives after this hold time, the stored spike is triggered (sent through the output). However, if a new spike arrives, the one that is stored can be triggered, retaining a new spike; or cancelled, without producing any output and without retaining any spike, depending on which of the two inputs the spike has arrived from. Its functionality is described in Equation (1). So, subtracting a spike-based input signal (
) to another (
) will generate a new spike signal with a spike rate (
) that will be the difference between both input spike rates.
The functionality of the H&F is to hold the incoming spikes during a fixed period of time while monitoring the input evolution to decide which spike to output, holding, cancelling, or firing spikes according to input spike ports and polarities.
This H&F block was designed for motor control, and so it only contemplates two input signals and two possible states for each of them (positive or negative). In our case, the input signals are related to specific pixels of the retinal projections and, therefore, they also contemplate positive and negative events (increase or decrease in the brightness of the scene, respectively). This fact is closely related to the different types of spikes that occur in the neurons of the human binocular system (excitatory and inhibitory spikes caused by neurons located in the iris).
However, in this work, it is necessary to contemplate information concerning the retina (left or right), since, for the purpose of the spiking subtraction operation, it behaves in an opposite way whether it is a left retina spike or a right retina spike. This behavior was not necessary to be considered in the basic H&F operator, since it contemplated specific lines for each input. In our case, it is not possible to carry it out in that way due to insufficient hardware resources (128 × 128 × 2 inputs would be needed).
To do that, a new Multi-Hold&Fire (MH&F) was implemented for this work, which was tested in previous works [
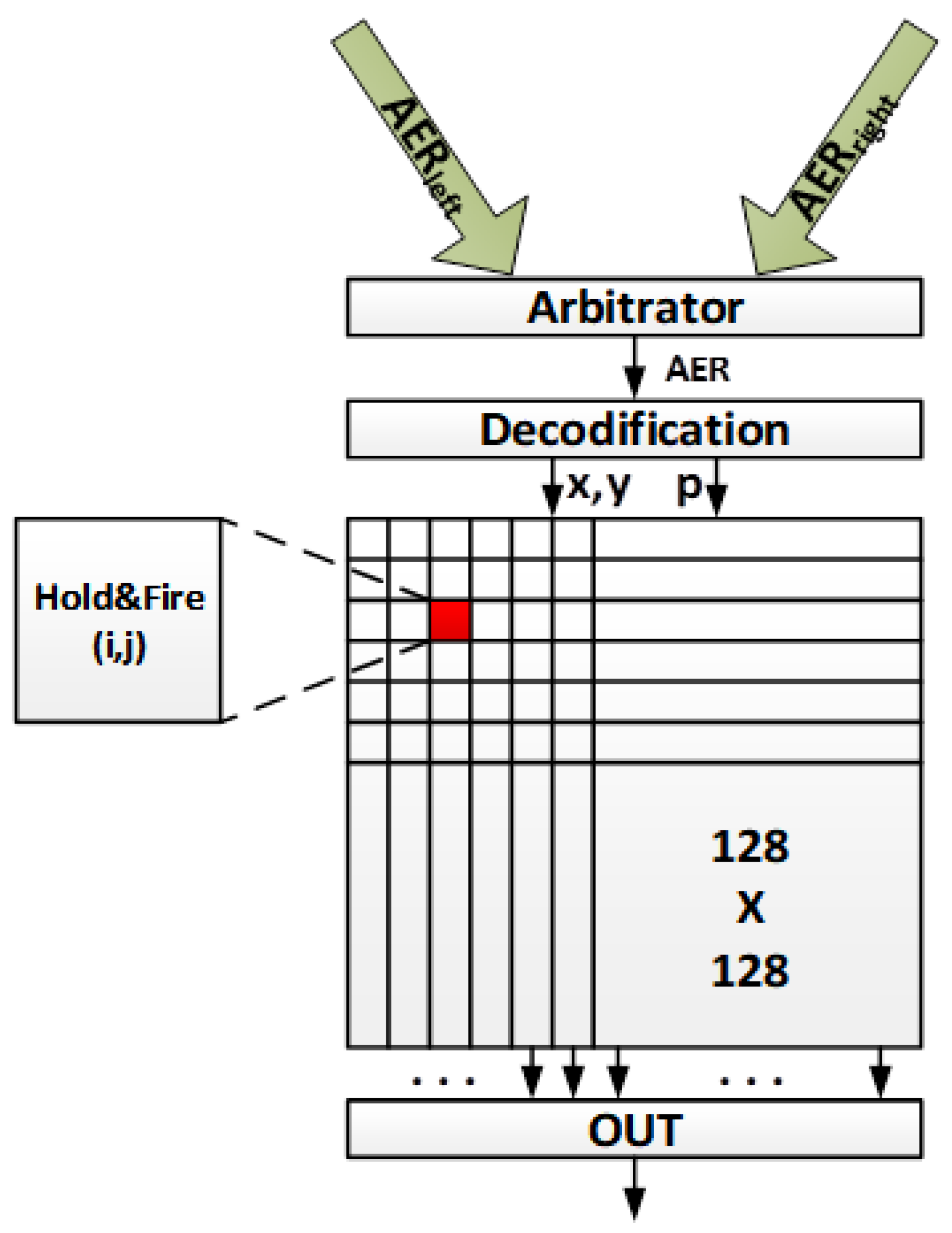
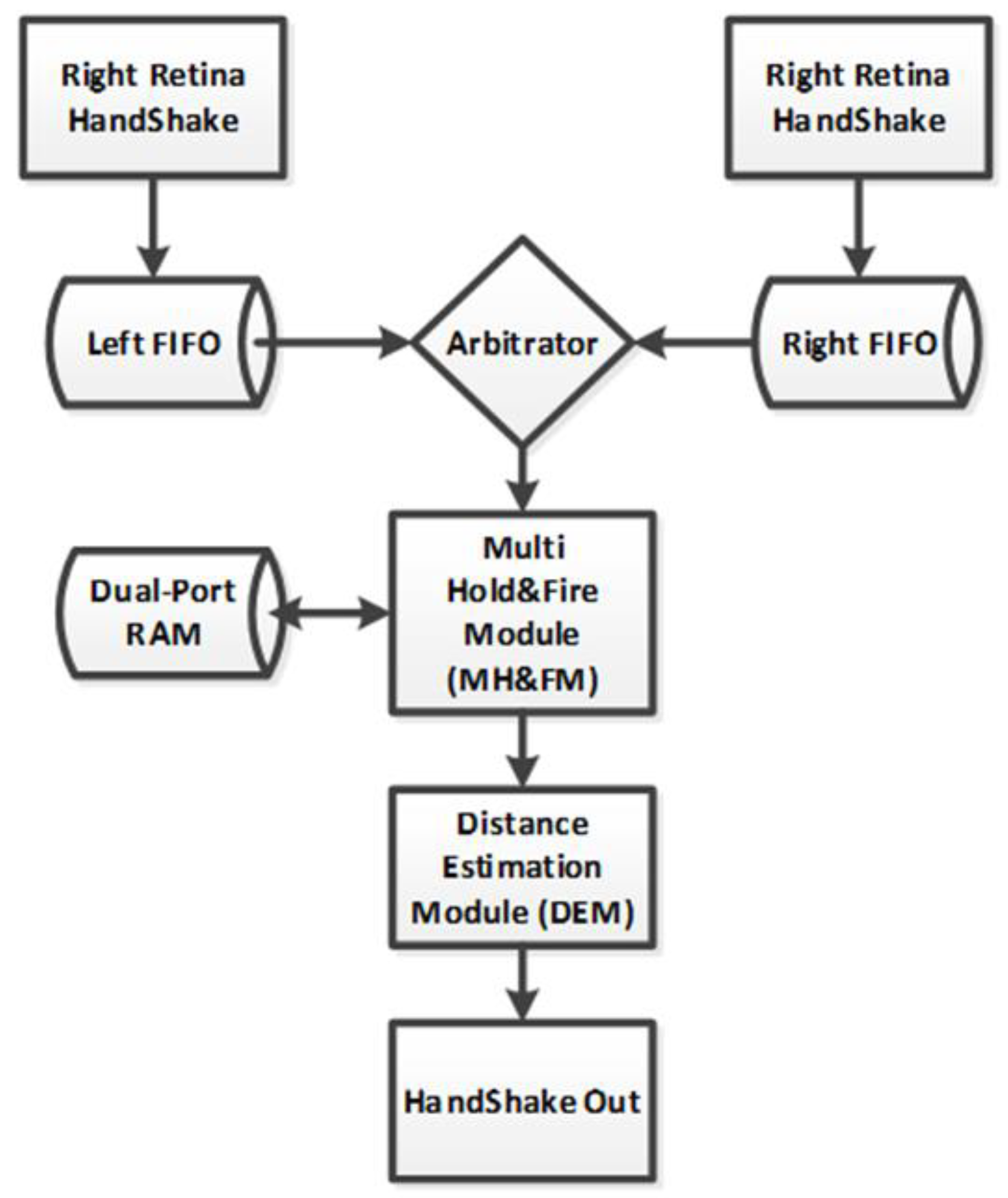
22]. Its functionality is based on the H&F module but, in this case, it is extended to a 128 × 128 matrix, storing the subtraction data for each pixel (see
Figure 4). MH&F bases its functionality on the ampliation of H&F block to the 128 × 128 spike signals produced by the retinas. Each retina has a resolution of 128 × 128 pixels and outputs a spiking signal using an address–event–representation (AER) bus related to the addresses of the pixels that have been fired and whose information is codified in frequency. So, the FPGA can discretize the pixels that have been fired in each retina. Once it receives the information, the address is used as a pointer to the H&F block (inside the MH&F module) where this spike goes. The two signals indicated above for each H&F block are one specific pixel from the right retina and the same pixel from the left retina. All the spikes fired by the 128 × 128 H&F blocks are unified by the MH&F module as one single output, representing its final spike rate.
The information from the spikes received in this module is stored internally in the FPGA in a dual-port memory. The information stored for each pixel is the current state (if it has a retained spike or not), the retina from where the spike comes from (right or left retina) and the spike polarity (positive/excitatory/ON or negative/inhibitory/OFF). Thus, the amount of memory needed is only 6 KB for storing the “disparity map” of the currently displayed scene.
Summarizing the MH&F module behavior, if two spikes coming from the same address of each projection (same pixel) have the same polarity and belong to different retinas, the algorithm will cancel both spikes with each other as long as it does not exceed the retention time initially established between the arrival of both spikes. On the other hand, when both spikes come from the same retina, the opposite behavior occurs and they are cancelled only if they have different polarizations (and the retention time is not exceeded). The full functionality is described on
Table 1.
As detailed in the H&L module, this new module has also a hold time and, after it, the information stored in a cell is reset. As the implementation of the MH&F module is based on a H&F array, the hold time of each cell is controlled independently.
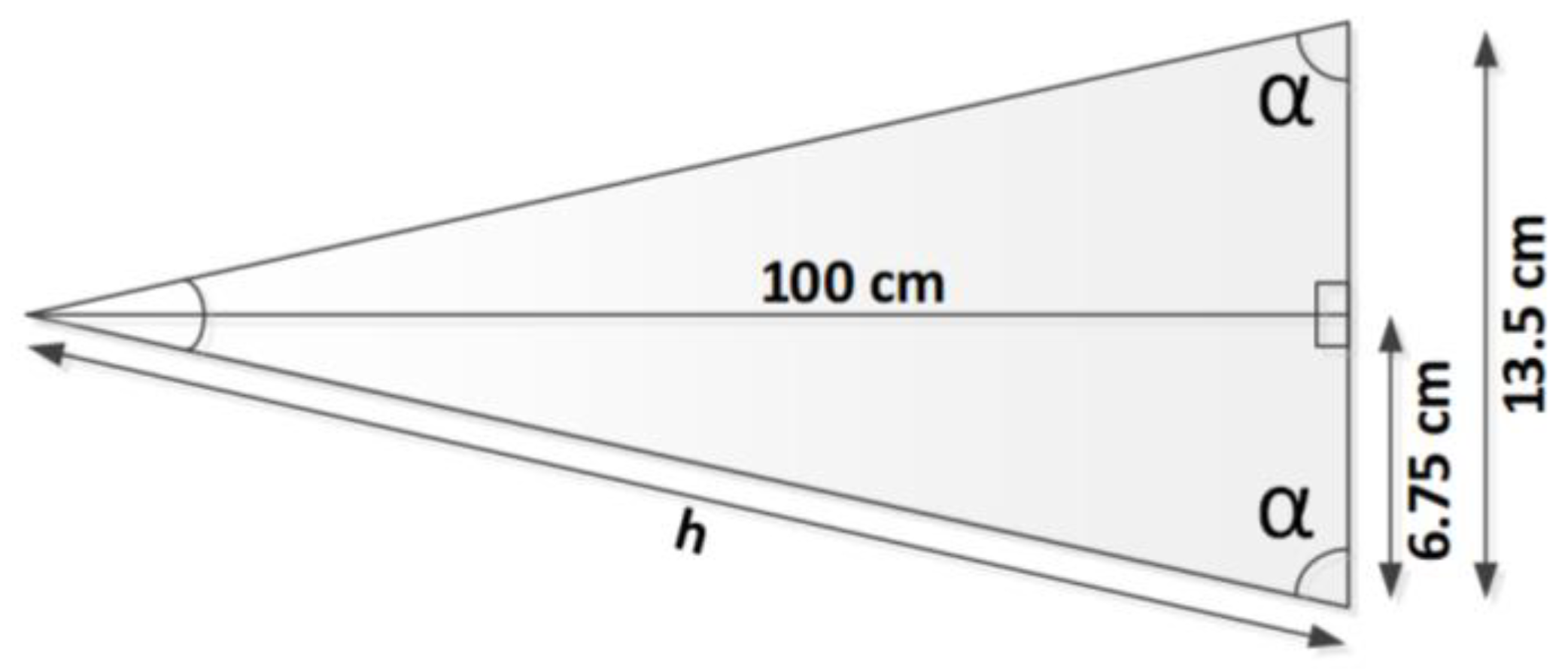
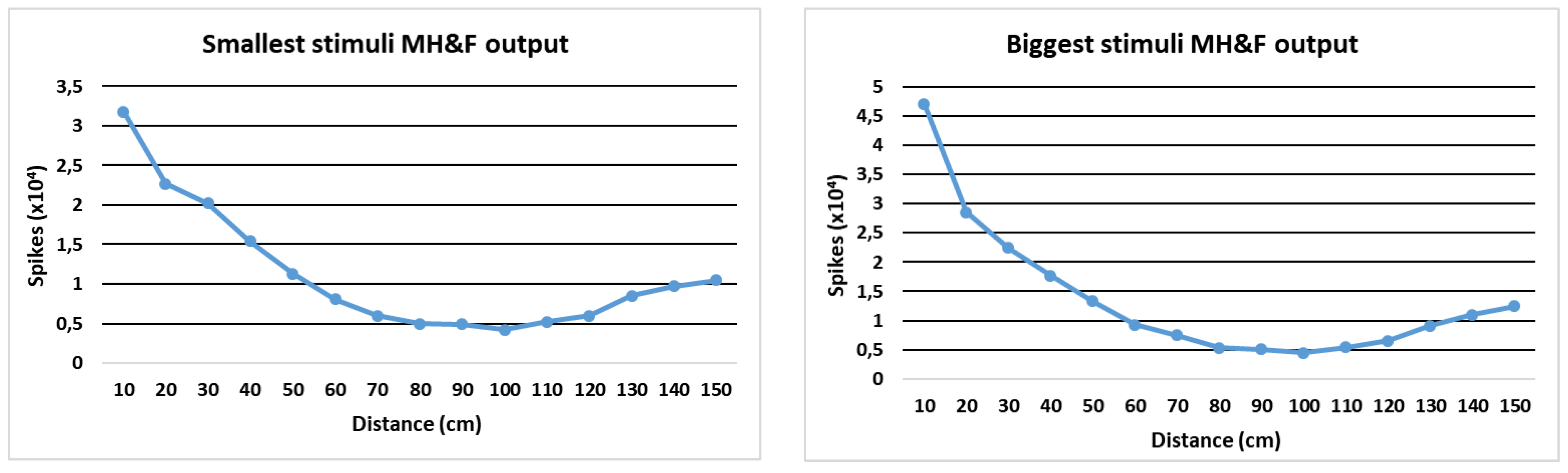
In the human binocular system, distance estimation is related to the process of calculating disparities. In fact, since the neuronal system works with spikes, this distance estimation consists of the spike frequency. So, theoretically, the human binocular system and the MH&F module implemented seem to work in a similar way. With this conclusion, the process of calculating disparities has been solved with the MH&F module, which provides a spiking output with an output frequency related to the disparities of the scene. If both projections are similar, the spike frequency at the output will be very low, while a high spike frequency means that there are many disparities in the scene. In addition, this is related to the physical calibration that was performed in the previous section, where the retinas were placed focused at a distance of 1 m. This way, if the object is above the focus point, the disparities will be minimum. According to the frequency response, a distance estimation can be implemented.
In the results section, the system is characterized using objects at different distances in order to verify this behavior and assign frequency values to the different distances. The module denoted as “distance estimation module” in
Figure 5 is calibrated after those tests.
The global distance estimation system depends on the frequency response of the disparity calculation output (after a normalization step). The solution obtained, although acceptable as a coarse-grain estimator, needs another support system to make distance estimation more accurate. This second system is detailed below.
2.2.2. Local Disparity Calculation with Population Inhibition
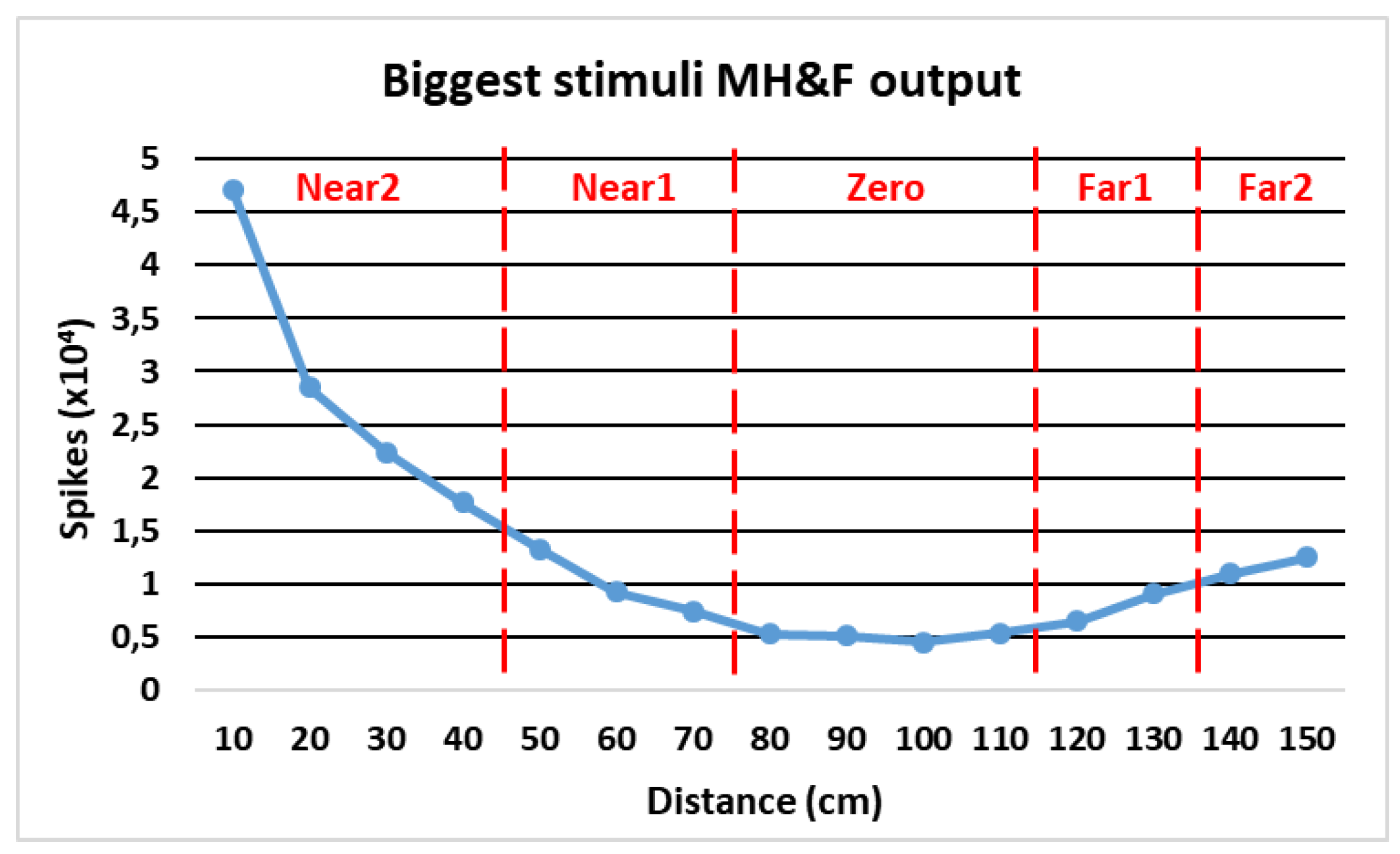
As detailed in the introduction section, distance-estimation neurons are specialized by independent populations. To implement these populations according to the human binocular system functionality, our system divides the projective space into horizontal bands (each one corresponds to a different neuron population). Those horizontal bands closest to the inner areas of the projective space of both retinas correspond to the populations of nearby neurons, while those closest to the outer zones are populations of distant neurons. On the other hand, the most central band of both retinas corresponds to the population of near-to-zero neurons.
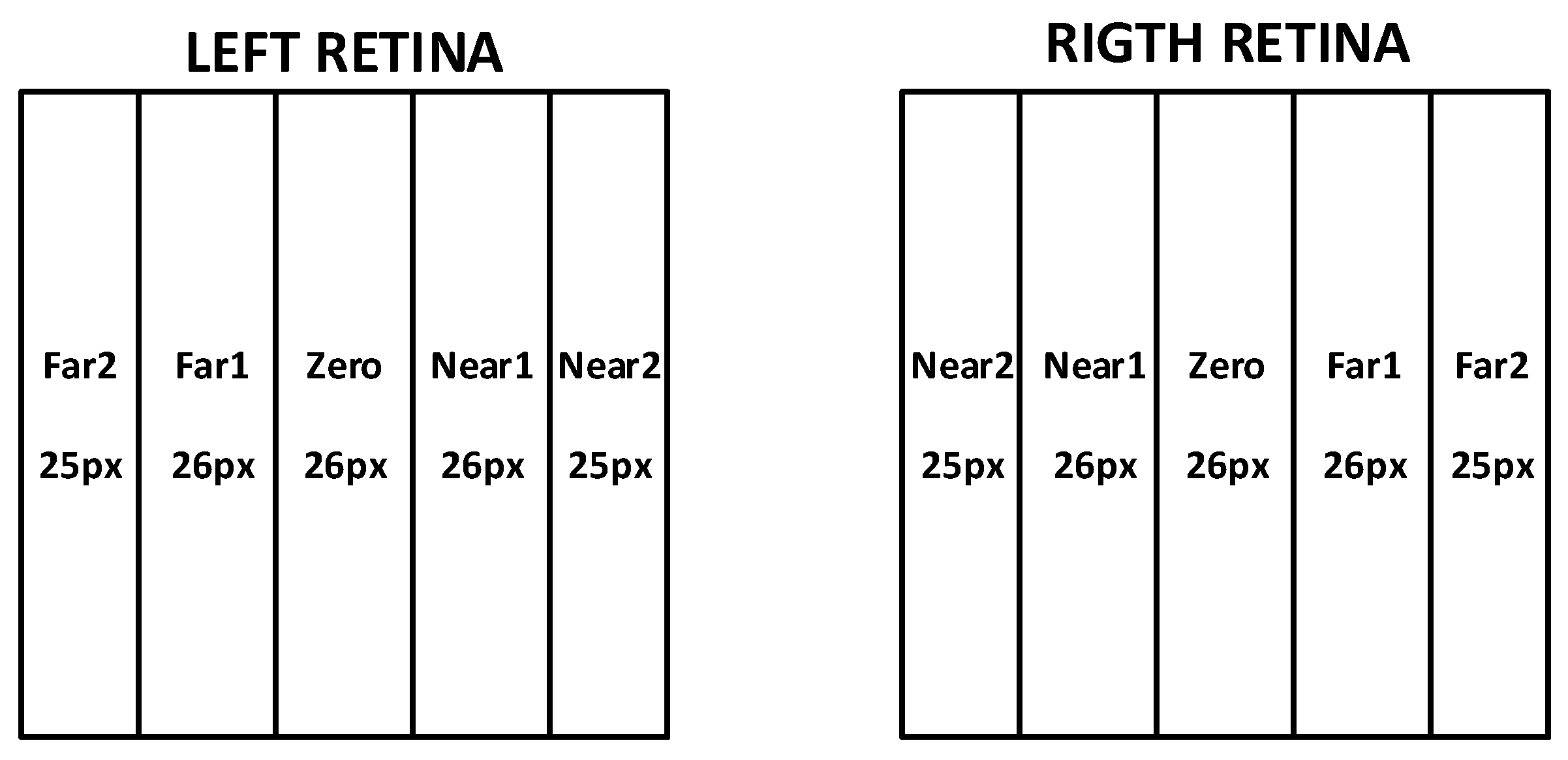
In order to verify the viability of this system and not cause an excessive segmentation of the projective space, it has been divided into five bands (neuron populations): Near2, Near1, Zero, Far1 and Far2. This segmentation is shown in
Figure 6. Regarding the size of each band and based on the neuronal specialization of the human binocular system, an equitable division of the horizontal projective space has been used. Thus, Near2 and Far2 bands have a width of 25 pixels, while Near1, Zero and Far1 bands have a width of 26 pixels.
As explained in the previous section, the main aim for this neuronal specialization is to improve the distance estimation accuracy of the full system. Although using the global estimation module exclusively (previous subsection) provides a distance estimation, using neuronal specialization based on a band segmentation improves its accuracy. So, the global distance system works like a coarse-grained estimator, while the neuronal specialized one works like a fine-grained estimator.
Each pair of corresponding bands (the same band from both retinas) carries out a disparity calculation process exclusively in their own projective space (using a MH&F module adapted to their size), obtaining a particular spikes frequency as output (depending on the disparities detected). In this way, the system has six spike flows: the first coming from the global estimation module outcome, and the one coming from each of the five specialized populations described before.
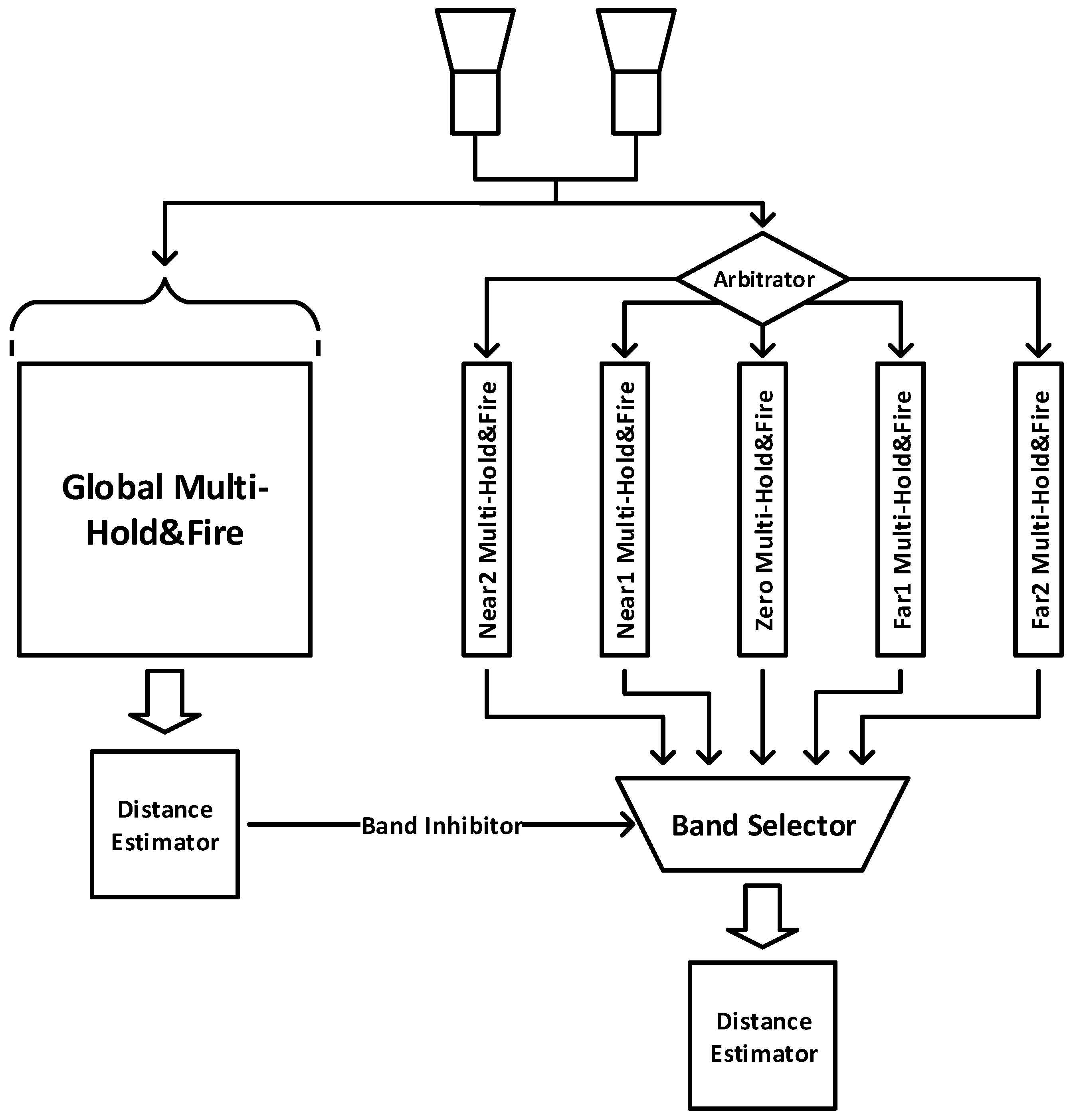
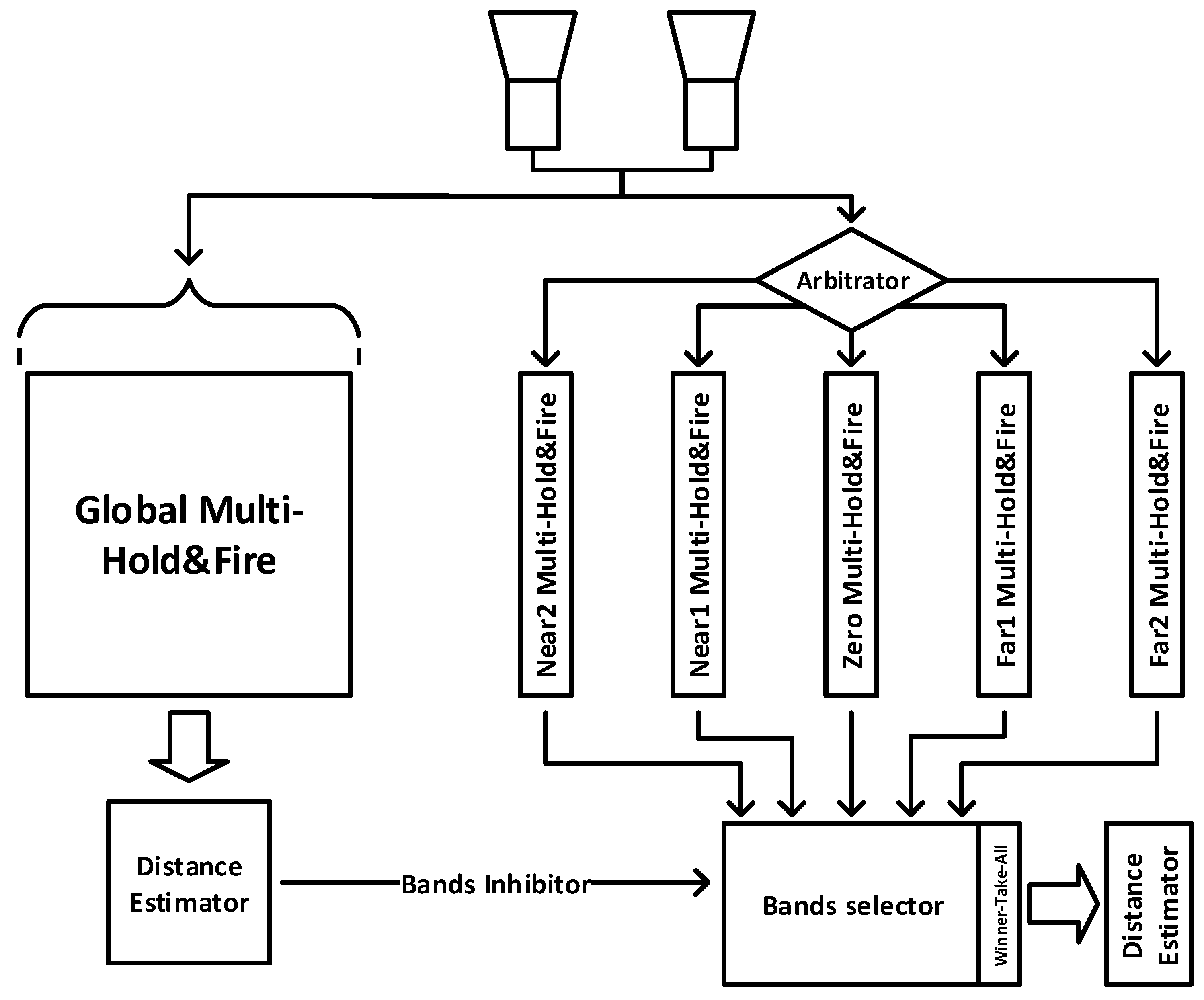
The global estimation system works as an arbiter to select the neural population where most spike traffic is focused. This system inhibits the outflow of the neuronal populations that do not intervene and allows the active population to send its outcome to the final distance estimator module. Once the active neuron population is selected, the final distance estimation module is carried out. So, the last distance estimation module is focused only on the projective space of the active band, ensuring that the noise coming from the rest of the bands does not intervene. The general functionality of the system is shown in
Figure 7.
The final functionality is described step by step:
- -
Retinas transmit spikes to the FPGA.
- -
The FPGA stores the information in FIFOs to avoid losing the information.
A general arbitrator takes each spike from the FIFOs and sends it to both systems: the global Multi-Hold&Fire is shown to the left in
Figure 7 and the local disparity calculation is shown to the right in
Figure 7.
- ○
In the Global Multi-Hold&Fire, the spike is stored in the 128 × 128 matrix indicated in
Figure 4. The functionality of this module is described in
Section 2.2.1.
- ○
In the Local side of the processing system, the spike is processed by an internal arbitrator, which sends it to the specific band where it belongs. Each band works like a Multi-Hold&Fire module but only with the spikes belonging to the band itself.
- -
Each Multi-Hold&Fire module (Global, Near2, Near1, Zero, Far1 and Far2) outputs the difference of the information from each retina inside the projection space where it is working (the whole space for the Global module, but only a specific band for the local modules).
- -
Distance estimator outside the Global module discretizes the band within the object in movement thanks to the spiking frequency obtained outside the Global module. This inhibitor acts like a band selection of the Local part of the system.
- -
Once the specific band is selected, the spike frequency obtained by itself (using the Multi-Hold&Fire with the spikes within its projection space) is sent to the final distance estimator. This estimator, according to the spike frequency, determines the final estimation of the moving object.
The thresholds used to determine the distance where the object is located (to inhibit the other bands) are calculated based on the characterization tests presented in the next section. This process reflects an important problem that is detailed deeply in the next section: some bands give similar frequency outputs for some objects, and so we need another module to intervene in the inhibitory process (this module is not included in
Figure 7 but will be included next).
After that, the results of the fine-grained system functionality (with the specialized neuronal populations) are compared to the coarse-grained one.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}