WSN Hardware for Automotive Applications: Preliminary Results for the Case of Public Transportation


 , ,
, ,  and
and
Abstract
1. Introduction
2. A Proposal of WSN Architecture for Automotive Applications
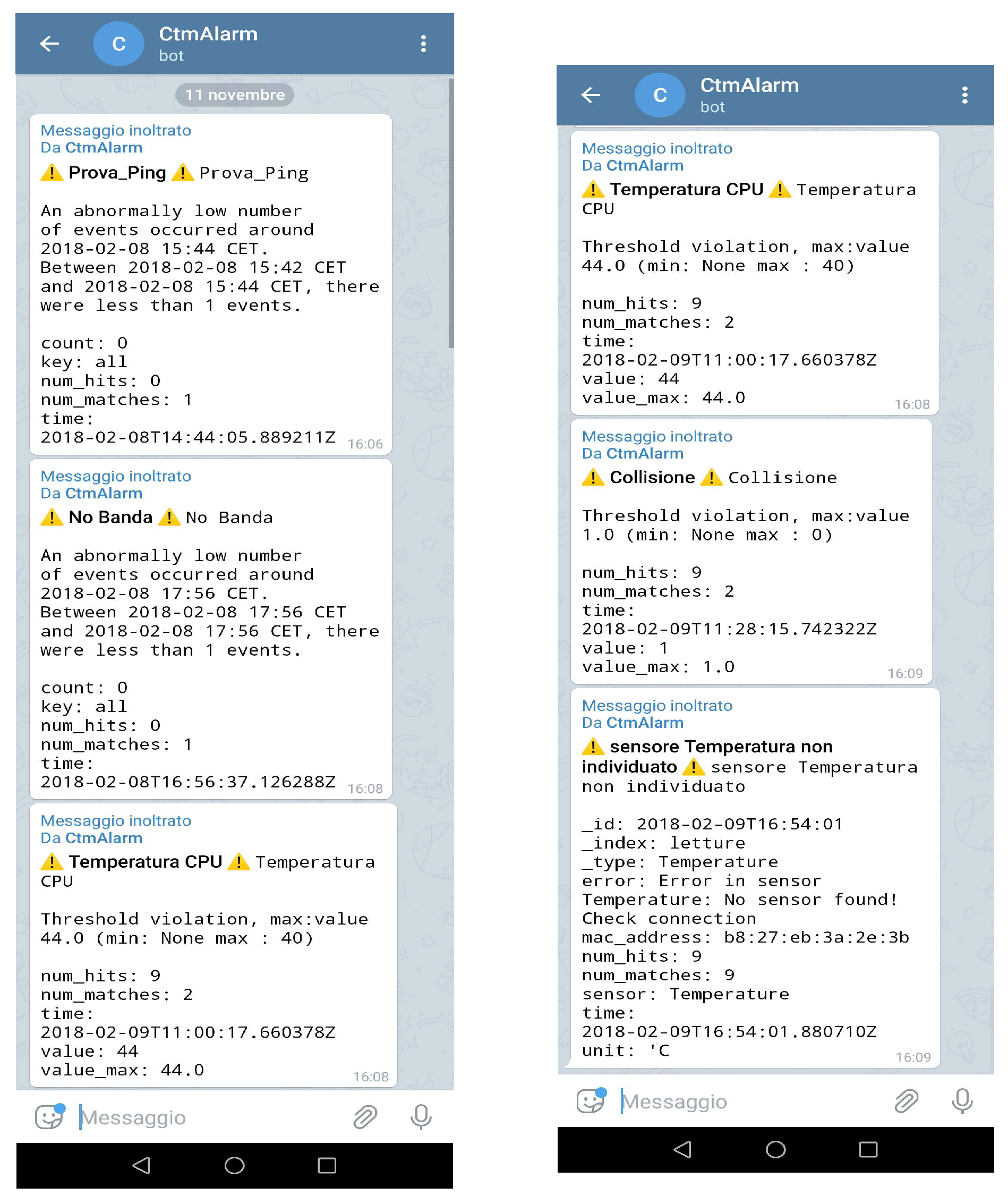
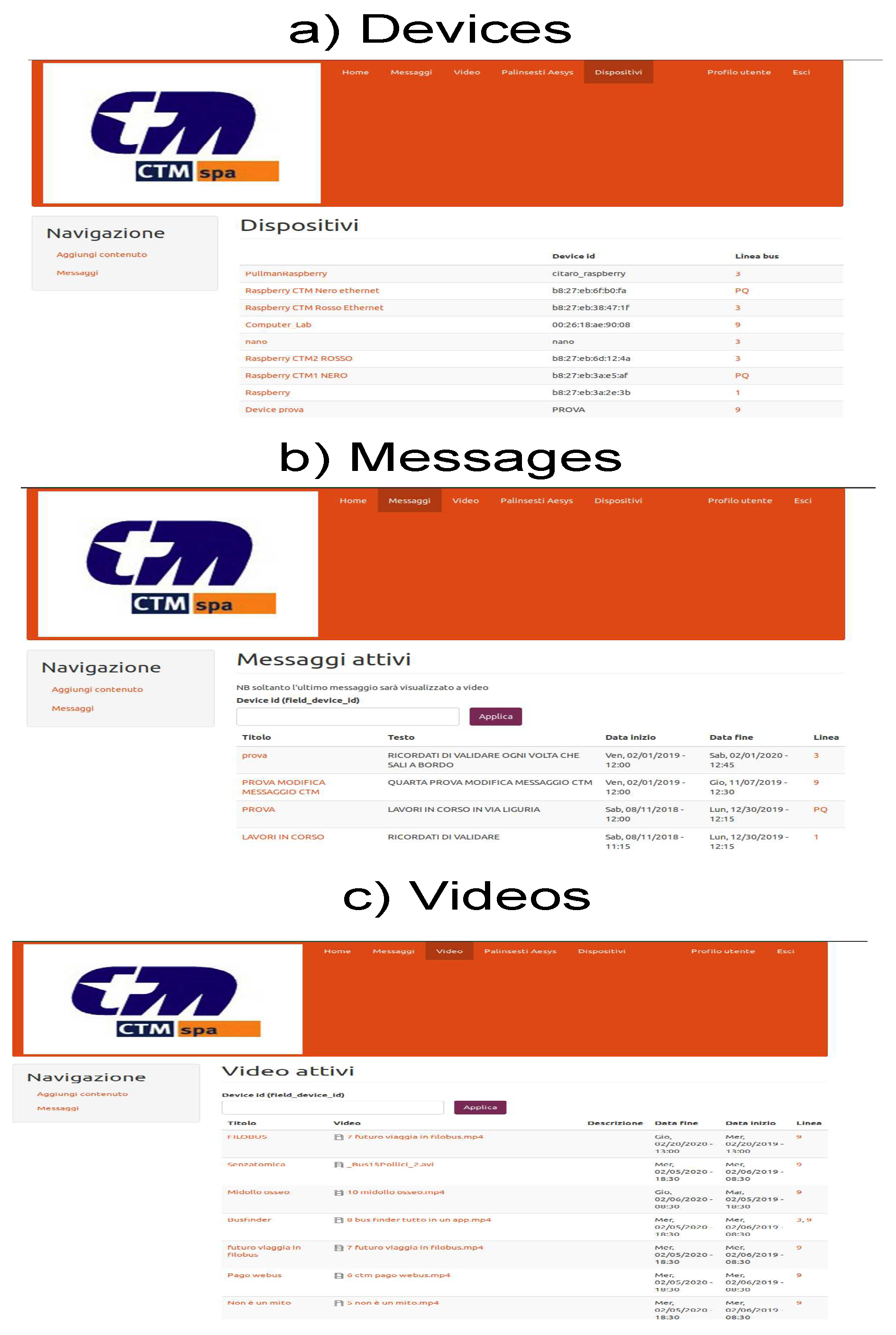
2.1. The System Functioning
2.2. Comparison of Open-Source Hardware
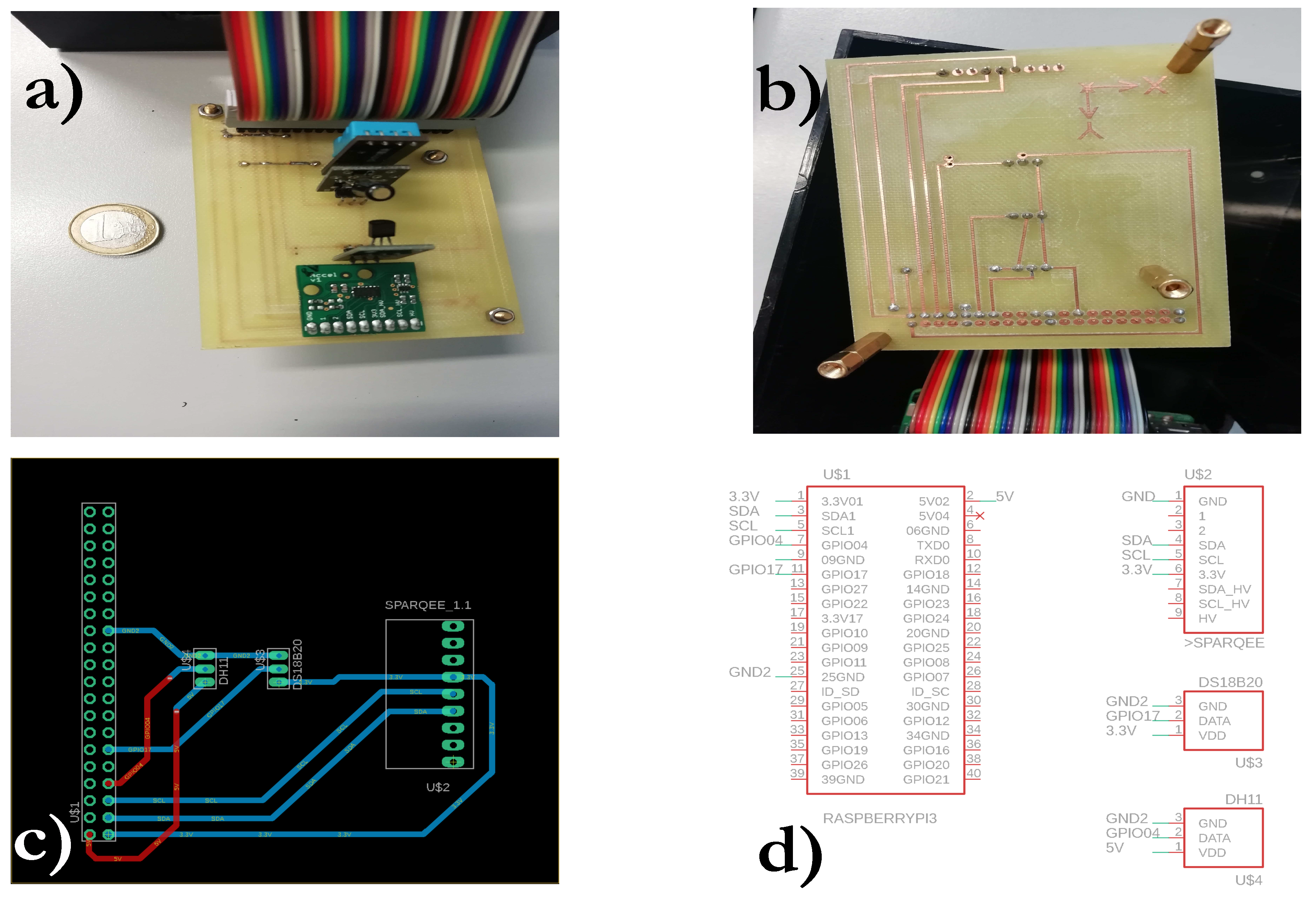
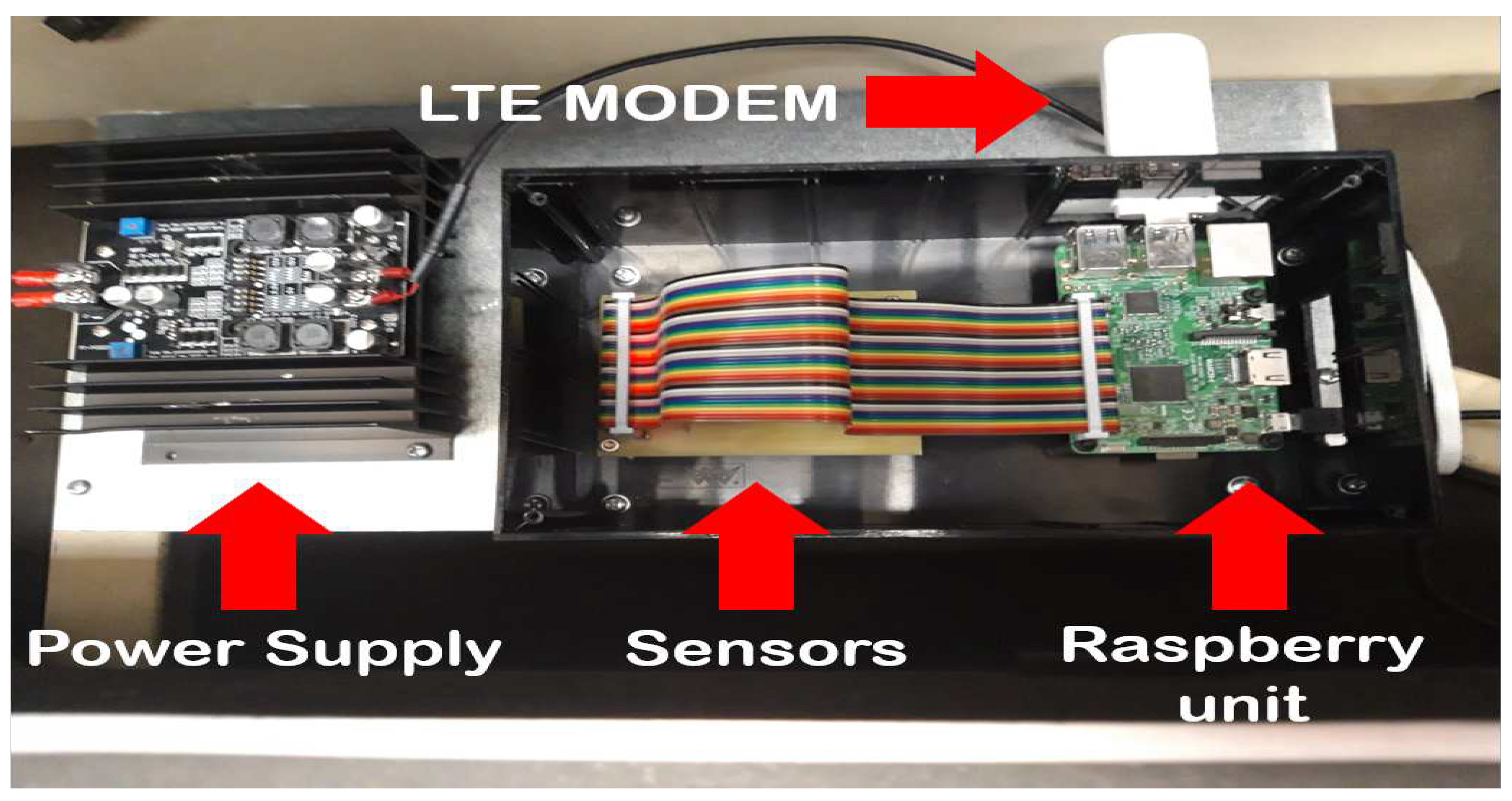
2.3. The Node Design
3. Signal Processing and Data Analysis
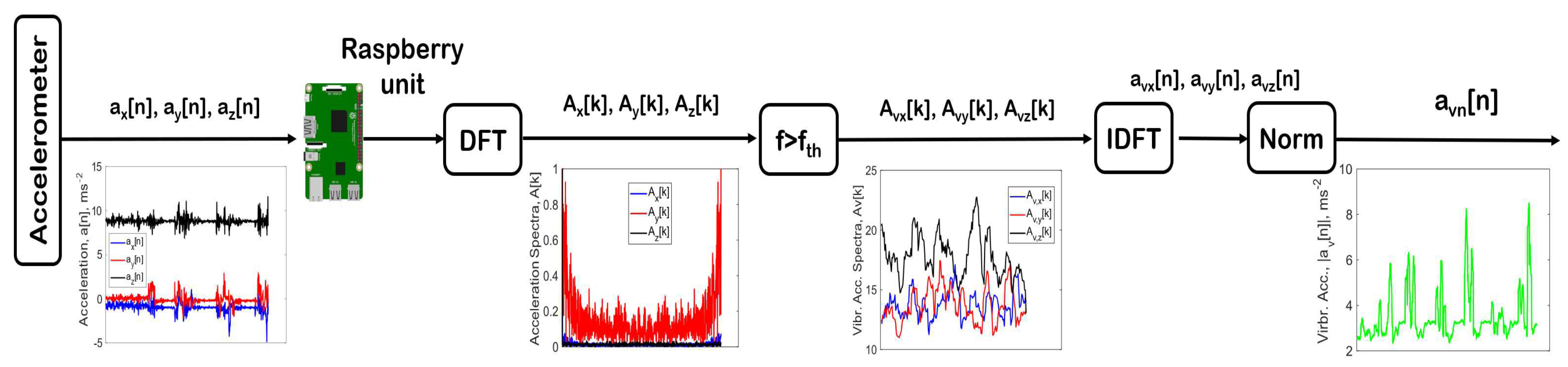
3.1. Signal Processing
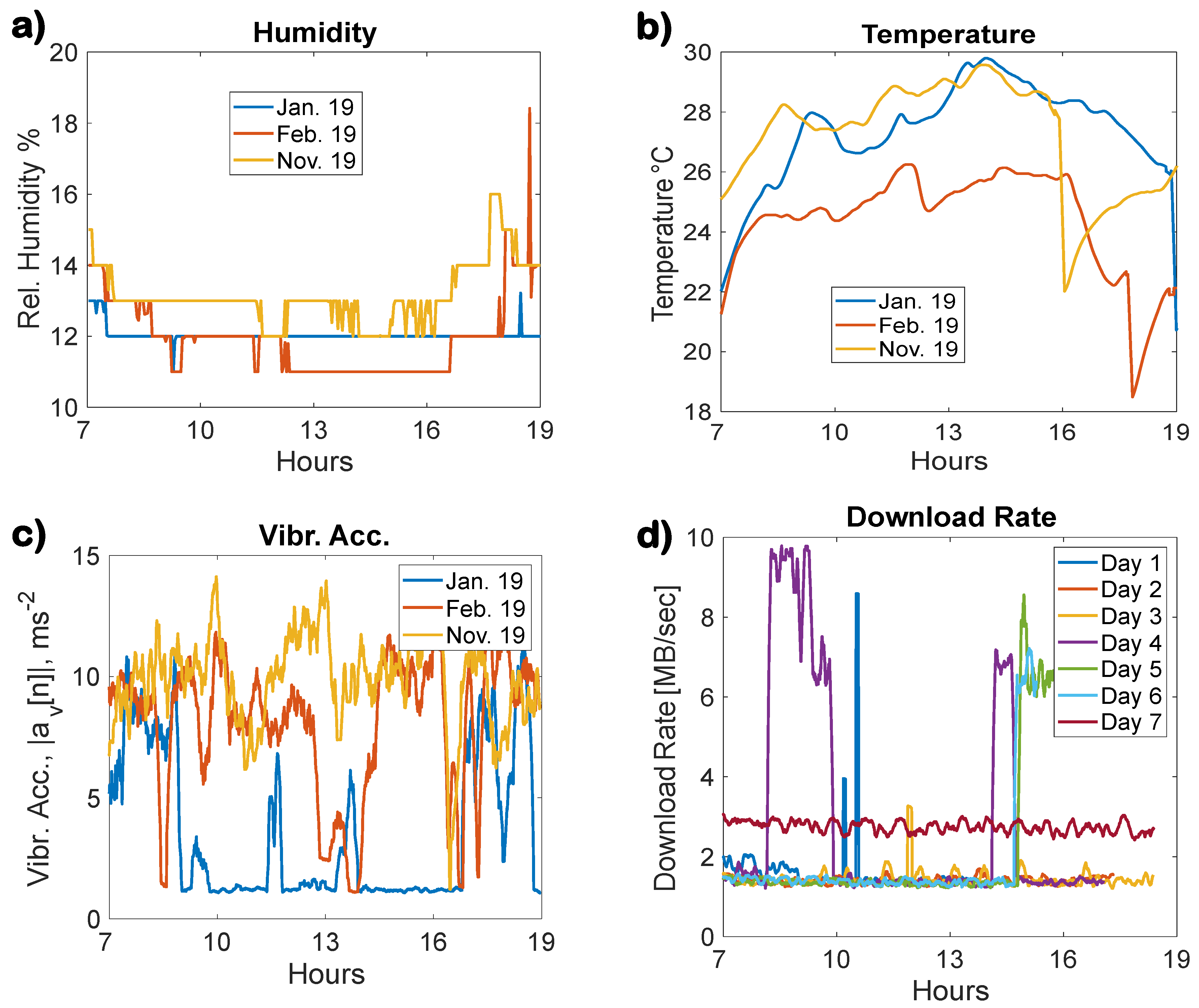
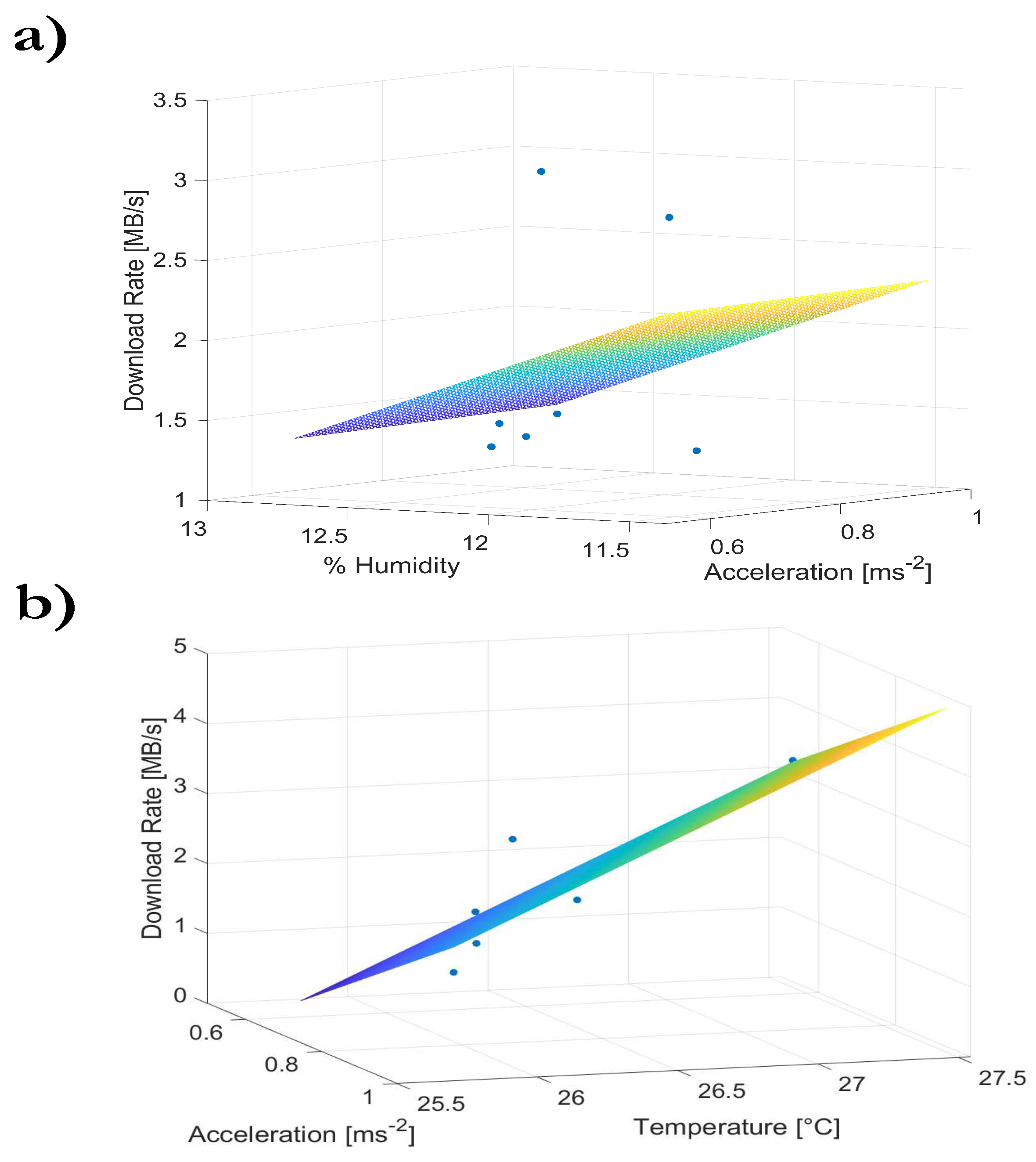
3.2. Data Analysis: Descriptive Statistics
4. Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Networks |
| ARM | Advanced RISC Machines |
| CMS | Content Management System |
| DFT | Discrete Fourier Transform |
| EMC | Electromagnetic Compatibility |
| GPU | Graphic Processing Unit |
| HDMI | High-Definition Multimedia Interface |
| ICT | Information and Communication Technology |
| IDFT | Inverse Discrete Fourier Transform |
| ITS | Intelligent Transportation Systems |
| LTE | Long Term Evolution |
| PCB | Printed Circuit Board |
| SBC | Single Board Computer |
| SDRAM | Synchronous Dynamic Random Access Memory |
| SWOT | Strengths, Weaknesses, Opportunities, Threats |
| Wi-Fi | Three letter acronym |
| WLAN | Wireless Local Area Network |
| WSN | Wireless Sensors Network |
References
- Wu, F.J.; Kao, Y.F.; Tseng, Y.C. From wireless sensor networks towards cyber physical systems. Pervasive Mob. Comput. 2011, 7, 397–413. [Google Scholar] [CrossRef]
- Gutiérrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gándara, M.Á. Automated irrigation system using a wireless sensor network and GPRS module. IEEE Trans. Instrum. Meas. 2013, 63, 166–176. [Google Scholar] [CrossRef]
- Rodriguez-Sanchez, M.; Borromeo, S.; Hernández-Tamames, J. Wireless sensor networks for conservation and monitoring cultural assets. IEEE Sens. J. 2010, 11, 1382–1389. [Google Scholar] [CrossRef]
- Gómez, R.; Camarero, A.; Molina, R. Development of a vessel-performance forecasting system: Methodological framework and case study. J. Waterw. Port. Coast. Ocean Eng. 2015, 142, 04015016. [Google Scholar] [CrossRef]
- Gungor, V.C.; Hancke, G.P. Industrial wireless sensor networks: Challenges, design principles, and technical approaches. IEEE Trans. Ind. Electron. 2009, 56, 4258–4265. [Google Scholar] [CrossRef]
- Da Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar]
- Ehrlich, M.; Wisniewski, L.; Jasperneite, J. State of the art and future applications of industrial wireless sensor networks. In Kommunikation und Bildverarbeitung in der Automation; Springer: Berlin/Heidelberg, Germany, 2018; pp. 28–39. [Google Scholar]
- Hu, X.; Xiong, W.; Li, W.; Ke, L. Application scenarios of wireless sensor networks for urban transportation: A survey. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7688–7691. [Google Scholar]
- Petracca, M.; Maggiani, L.; Stefano Bocchino, C. When Buses Become Smart: The OBIT Experience. In Intelligent Transportation Systems; CRC Press: Boca Raton, FL, USA, 2016; pp. 48–68. [Google Scholar]
- Bohli, J.M.; Hessler, A.; Ugus, O.; Westhoff, D. A secure and resilient WSN roadside architecture for intelligent transport systems. In Proceedings of the First ACM Conference on Wireless Network Security, Alexandria, VA, USA, 31 March–2 April 2008; pp. 161–171. [Google Scholar]
- Kang, L.; Poslad, S.; Wang, W.; Li, X.; Zhang, Y.; Wang, C. A public transport bus as a flexible mobile smart environment sensing platform for IoT. In Proceedings of the 2016 12th International Conference on Intelligent Environments (IE), London, UK, 14–16 September 2016; pp. 1–8. [Google Scholar]
- Nellore, K.; Hancke, G. A survey on urban traffic management system using wireless sensor networks. Sensors 2016, 16, 157. [Google Scholar] [CrossRef]
- Rodelgo-Lacruz, M.; Gil-Castineira, F.; Gonzalez-Castano, F.; Pousada-Carballo, J.; Contreras, J.; Gomez, A.; Bueno-Delgado, M.; Egea-Lopez, E.; Vales-Alonso, J.; Garcia-Haro, J. Base technologies for vehicular networking applications: Review and case studies. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 2567–2572. [Google Scholar]
- Strutu, M.; Stamatescu, G.; Popescu, D. A mobile sensor network based road surface monitoring system. In Proceedings of the 2013 17th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 11–13 October 2013; pp. 630–634. [Google Scholar]
- ElBatt, T.; Saraydar, C.; Ames, M.; Talty, T. Potential for intra-vehicle wireless automotive sensor networks. In Proceedings of the 2006 IEEE Sarnoff Symposium, Princeton, NJ, USA, 27–28 March 2006; pp. 1–4. [Google Scholar]
- Tavares, J.; Velez, F.; Ferro, J. Application of wireless sensor networks to automobiles. Meas. Sci. Rev. 2008, 8, 65–70. [Google Scholar] [CrossRef]
- Tewolde, G.S. Sensor and network technology for intelligent transportation systems. In Proceedings of the 2012 IEEE International Conference on Electro/Information Technology, Indianapolis, IN, USA, 6–8 May 2012; pp. 1–7. [Google Scholar]
- Chien, T.V.; Chan, H.N.; Huu, T.N. A comparative study on hardware platforms for wireless sensor networks. Int. J. Adv. Sci. Eng. Inf. Technol. 2012, 2, 70–74. [Google Scholar] [CrossRef]
- Vujović, V.; Maksimović, M. Raspberry Pi as a Wireless Sensor node: Performances and constraints. In Proceedings of the 2014 37th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 26–30 May 2014; pp. 1013–1018. [Google Scholar]
- Baire, M.; Melis, A.; BrunoLodi, M.; Fanti, A.; Mazzarella, G. Study and Design of a Wireless Sensors Network for the Optimization of Bread Manufacturing Process. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 1–4. [Google Scholar]
- Iszaidy, I.; Ngadiran, R.; Ahmad, R.; Jais, M.; Shuhaizar, D. Implementation of raspberry Pi for vehicle tracking and travel time information system: A survey. In Proceedings of the 2016 International Conference on Robotics, Automation and Sciences (ICORAS), Ayer Keroh, Malaysia, 5–6 November 2016; pp. 1–4. [Google Scholar]
- Beadman, T. Legislation Update–Radio and EMC in the Automotive Environment. J. Navig. 2001, 54, 65–69. [Google Scholar] [CrossRef]
- Mach, V.; Kovář, S.; Valouch, J.; Adámek, M.; Silva, R.M.S. Electromagnetic compatibility of Raspberry Pi development platform in near and far-field. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-Fall), Singapore, 19–22 November 2017; pp. 2466–2472. [Google Scholar]
- Tsukioka, A.; Nagata, M.; Taniguchi, K.; Fujimoto, D.; Akimoto, R.; Egami, T.; Niinomi, K.; Yuhara, T.; Hayashi, S.; Mathews, R.; et al. Simulation techniques for EMC compliant design of automotive IC chips and modules. In Proceedings of the 2017 International Symposium on Electromagnetic Compatibility-EMC EUROPE, Angers, France, 4–7 September 2017; pp. 1–6. [Google Scholar]
- Luchian, E.F.; Taut, A.; Ivanciu, I.A.; Lazar, G.; Dobrota, V. Mobile wireless sensor network gateway: A raspberry Pi implementation with a VPN backend to OpenStack. In Proceedings of the 2017 25th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 21–23 September 2017; pp. 1–5. [Google Scholar]
- Ovsthus, K.; Kristensen, L.M. An industrial perspective on wireless sensor networks—A survey of requirements, protocols, and challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1391–1412. [Google Scholar]
- Romer, K.; Mattern, F. The design space of wireless sensor networks. IEEE Wirel. Commun. 2004, 11, 54–61. [Google Scholar] [CrossRef]
- Gawade, P.; Meeankshi, A. IOT Based Smart Public Transport System. Int. J. Sci. Res. Publ. 2017, 7, 390–396. [Google Scholar]
- Ferdoush, S.; Li, X. Wireless sensor network system design using Raspberry Pi and Arduino for environmental monitoring applications. Procedia Comput. Sci. 2014, 34, 103–110. [Google Scholar] [CrossRef]
- Liu, J.; Wang, P.; Tian, X. Vibration displacement measurement based on three axes accelerometer. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 2374–2378. [Google Scholar]
- Castellini, P.; Montanini, R. Automotive components vibration measurements by tracking laser Doppler vibrometry: Advances in signal processing. Meas. Sci. Technol. 2002, 13, 1266. [Google Scholar] [CrossRef]
- Le Sage, T.; Bindel, A.; Conway, P.; Justham, L.; Slawson, S.; West, A. Embedded programming and real-time signal processing of swimming strokes. Sport. Eng. 2011, 14, 1. [Google Scholar] [CrossRef]
- Karlsson, R.; Gustafsson, F. The future of automotive localization algorithms: Available, reliable, and scalable localization: Anywhere and anytime. IEEE Signal Process. Mag. 2017, 34, 60–69. [Google Scholar] [CrossRef]
- Chudzikiewicz, A.; Drozdziel, J.; Sowinski, B. Practical Solution of Rail Vehicle and Track Dynamics Monitoring System. In Key Engineering Materials; Trans Tech Publ: Zurich, Switzerland, 2012; Volume 518, pp. 271–280. [Google Scholar]
- Weippert, M.; Stielow, J.; Kumar, M.; Kreuzfeld, S.; Rieger, A.; Stoll, R. Tri-axial high-resolution acceleration for oxygen uptake estimation: validation of a multi-sensor device and a novel analysis method. Appl. Physiol. Nutr. Metab. 2012, 38, 345–351. [Google Scholar] [CrossRef]
- Rettore, P.H.; Campolina, A.B.; Villas, L.A.; Loureiro, A.A. Identifying relationships in vehicular sensor data: A case study and characterization. In Proceedings of the 6th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, Malta, Malta, 13–17 November 2016; pp. 33–40. [Google Scholar]
- Guestrin, C.; Bodik, P.; Thibaux, R.; Paskin, M.; Madden, S. Distributed regression: An efficient framework for modeling sensor network data. In Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004; pp. 1–10. [Google Scholar]
- Bejarano-Luque, J.L.; Toril, M.; Fernández-Navarro, M.; Acedo-Hernández, R.; Luna-Ramírez, S. A Data-Driven Algorithm for Indoor/Outdoor Detection Based on Connection Traces in a LTE Network. IEEE Access 2019, 7, 65877–65888. [Google Scholar] [CrossRef]
- Nguyen, J.L.; Schwartz, J.; Dockery, D.W. The relationship between indoor and outdoor temperature, apparent temperature, relative humidity, and absolute humidity. Indoor Air 2014, 24, 103–112. [Google Scholar] [CrossRef]
- Silveira, E.; Bonho, S. Temperature monitoring through wireless sensor network using an 802.15. 4/802.11 gateway. IFAC-PapersOnLine 2016, 49, 120–125. [Google Scholar] [CrossRef]
- Galvan-Tejada, G.M.; Aguilar-Torrentera, J. Analysis of Propagation for Wireless Sensor Networks in Outdoors. Prog. Electromagn. Res. 2019, 83, 153–175. [Google Scholar] [CrossRef]
- Celaya-Echarri, M.; Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Falcone, F. Performance Evaluation and Interference Characterization of Wireless Sensor Networks for Complex High-Node Density Scenarios. Sensors 2019, 19, 3516. [Google Scholar] [CrossRef] [PubMed]
- Merabtine, N.; Djenouri, D.; Zegour, D.E.; Boumessaidia, B.; Boutahraoui, A. Balanced clustering approach with energy prediction and round-time adaptation in wireless sensor networks. IJCNDS 2019, 22, 245–274. [Google Scholar] [CrossRef]
- Pickton, D.W.; Wright, S. What’s swot in strategic analysis? Strateg. Chang. 1998, 7, 101–109. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Spano, I.L.; Mocci, A.; Serpi, A.; Marongiu, I.; Gatto, G. Performance and EMC analysis of an interleaved PFC boost converter topology. In Proceedings of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Raspberry Pi 3 Bi+ | Nano-ULT3 | VB0X-3120 | |
|---|---|---|---|
| CPU | Cortex-A53 64b, 1.4 GHz | Cel3955UDualC 64b, 2 GHz | I32980U 64b, 1.6 GHz |
| Ram Memory | 1 GB | 4 GB | 8 GB |
| Disk | 16-32-64 GB | 32 GB | 256 GB |
| Operative System | Raspbian | Ubuntu 18.10 | Windows 7, 8.1, Linux 3.0 |
| Display Interface | No | Yes | No |
| Num. HDMI Port | 1 | 2 | 1 |
| I/O Interface | Yes | Yes | Yes |
| Audio | Yes | Yes | Yes |
| DC Power Input, V | 5 | 12 | 9 |
| Dimension, mm × mm × mm | 82 × 56 × 19.5 | 115 × 165 | 182 × 167.6 × 54 |
| Weight, g | 50 | 850 | 1406 |
| Operating Temp., °C | −10–85 | −20–6 | −40–70 |
| Humidity, % | Not declared | 5–95 | 10–90 |
| Certified for Automotive | No | No | Yes |
| Price, €(VAT excluded) | 61.41 | 950 | 1065 |
| Date | Transfer Time, sec | No. of Characters |
|---|---|---|
| 25 February 2019 | 1 | 22 |
| 25 February 2019 | 2 | 42 |
| 25 February 2019 | 1 | 22 |
| 25 February 2019 | 1 | 42 |
| 26 February 2019 | 3 | 41 |
| 27 February 2019 | 1 | 21 |
| 27 February 2019 | 2 | 22 |
| 27 February 2019 | 1 | 42 |
| Date | Transfer Time, sec | No. of Videos | Size, MB |
|---|---|---|---|
| 25 February 2019 | 59 | 1 | 8.91 |
| 25 February 2019 | 122 | 2 | 22.91 |
| 25 February 2019 | 61 | 1 | 5.9 |
| 25 February 2019 | 117 | 2 | 30.59 |
| 26 February 2019 | 58 | 1 | 14 |
| 27 February 2019 | 64 | 1 | 16.59 |
| 27 February 2019 | 123 | 2 | 30.59 |
| 27 February 2019 | 155 | 1 | 39.5 |
| Value | |
|---|---|
| 0.6321 | |
| Raspberry Pi 3 Bi+ | Nano-ULT3 | VB0X-3120 | |
|---|---|---|---|
| Automotive Certification Price, € | 45.17 | 45.17 | 0 |
| Software Cost, € | 500 | 500 | 1000 |
| Hardware Cost, € | 264.41 | 1150 | 1065 |
| Minimum Total Cost, € | 1416.58 | 2306.17 | 2175.00 |
| Maximum Total Cost, € | 1828.08 | 2716.67 | 2586.50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baire, M.; Melis, A.; Lodi, M.B.; Dachena, C.; Fanti, A.; Farris, S.; Pisanu, T.; Mazzarella, G. WSN Hardware for Automotive Applications: Preliminary Results for the Case of Public Transportation. Electronics 2019, 8, 1483. https://doi.org/10.3390/electronics8121483
Baire M, Melis A, Lodi MB, Dachena C, Fanti A, Farris S, Pisanu T, Mazzarella G. WSN Hardware for Automotive Applications: Preliminary Results for the Case of Public Transportation. Electronics. 2019; 8(12):1483. https://doi.org/10.3390/electronics8121483
Chicago/Turabian StyleBaire, Matteo, Andrea Melis, Matteo Bruno Lodi, Chiara Dachena, Alessandro Fanti, Simona Farris, Tonino Pisanu, and Giuseppe Mazzarella. 2019. "WSN Hardware for Automotive Applications: Preliminary Results for the Case of Public Transportation" Electronics 8, no. 12: 1483. https://doi.org/10.3390/electronics8121483
APA StyleBaire, M., Melis, A., Lodi, M. B., Dachena, C., Fanti, A., Farris, S., Pisanu, T., & Mazzarella, G. (2019). WSN Hardware for Automotive Applications: Preliminary Results for the Case of Public Transportation. Electronics, 8(12), 1483. https://doi.org/10.3390/electronics8121483