1. Introduction
The application of multiple-input multiple-output (MIMO) techniques to radar systems has received considerable attention recently [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11]. Unlike traditional phased-array radars in which a steered beam is used at the transmitter to scan a sector, MIMO radar transmits different waveforms from each omnidirectional antenna element simultaneously, allowing for a sector scan rate that is several times faster than steered beam radars. The waveforms which bear the target information can be extracted by a bank of matched filters at the receiver end. Generally, MIMO radar is implemented through either spatial diversity in antennas or through colocated antennas using orthogonal independently transmitted waveforms [
2]. In this paper, only the colocated antenna configuration were examined [
7,
8,
9,
10,
11]. It has been shown that this kind of radar system has many advantages such as an excellent clutter interference rejection capability [
7], improved parameter identifiability [
8], and enhanced flexibility for transmitting beampattern design [
10,
11]. One interesting application of collocated MIMO radars is their use in navy ships to detect multiple surface targets, in both littoral and open ocean, that have small radar-cross sections and become increasingly difficult to detect when there are significant sea clutter environments [
12,
13,
14,
15]. With collocated MIMO radar, a ship can detect these targets with an excellent clutter interference rejection capability and maintain its radar picture with a fast refresh rate to provide precious battle space and reaction time to fight.
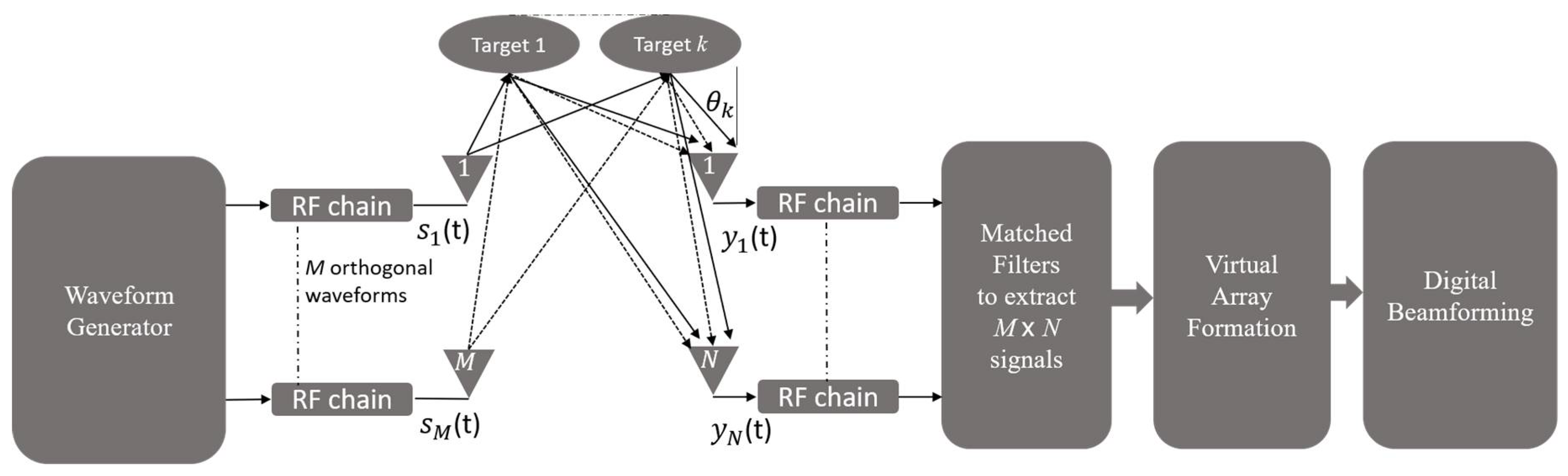
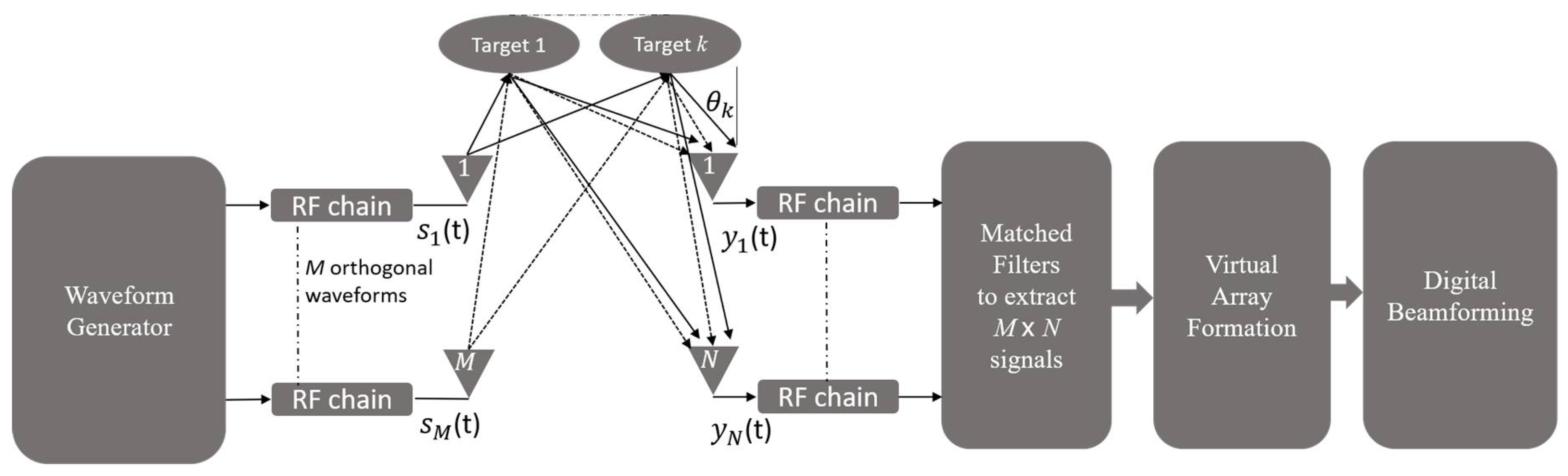
A generic MIMO radar design is illustrated in
Figure 1, where there are
M independent orthogonal transmitters and
N receivers. Each receiver would have
M matched filters that correspond to the
M distinct transmitted waveforms. Having
M independent transmitters and
N receivers produces
MN paths for the return from the
kth target, which, in turn, creates a virtual array with a larger effective aperture than the physical array. The received signal for the system illustrated in
Figure 1 is given by [
2,
5]
where
α is the complex amplitude of the
kth return signal from a target located at an angle
,
is the baseband samples of the
mth transmitted signal,
is the total phase delay between the
mth transmitting element, the
kth target, and the
nth receiver,
is the carrier frequency, [
n] is the time index, and
is an additive white Gaussian noise with zero-mean and a covariance matrix
Rw = σ2Im. It is important to note in (1) that the MIMO radar takes the sum of returns from all targets, whereas a phased array radar will only have a return from its directed beam.
Using orthogonal signals and matched filters, a MIMO radar can distinguish the received paths independently and can achieve a ubiquitous mode where it is able to search an entire area in only a few short pulses instead of having to scan a beam through the same sector. Separating and distinguishing the independent transmit and receive paths is the most critical step in designing a MIMO radar because these signals form the virtual array, which defines the two-way antenna pattern, and which contains the information necessary to conduct beamforming on reception. Time-division multiplexing (TDM) MIMO was selected as the orthogonal waveform to be implemented in this paper for its simplicity to form a virtual array and to reduce the number of matched filters required on reception.
Although theoretical analysis has shown the benefits of the MIMO radar concept, experimental measurements to demonstrate the feasibility and performance of such systems are of great interest. Recent work has validated the concept of MIMO radar using commercially available software-defined radios (SDRs) such as the USRPs [
16,
17,
18,
19]. However, most SDRs are not ideal for deploying phase-coherent MIMO systems because it is difficult to align and synchronize the time and phase responses across multiple radios [
16,
20]. To circumvent this problem, this paper proposes a more convenient experimental MIMO radar testbed based on Keysight’s N5244A 4-port PNA-X network analyzer [
21] and Simulink [
22] that can provide a secure, reliable self-contained phase-coherent RF front-end across four RF channels, which is a critical requirement for MIMO Radar signal processing algorithms. The MIMO testbed described herein was designed to transmit and receive TDM stepped-frequency continuous wave signals with a total sweep bandwidth of 450 MHz at a center frequency 8.78 GHz that can be used to explore advanced MIMO radar beamforming techniques and verify range and angle resolutions.
2. Experimental Setup and Measurement Techniques
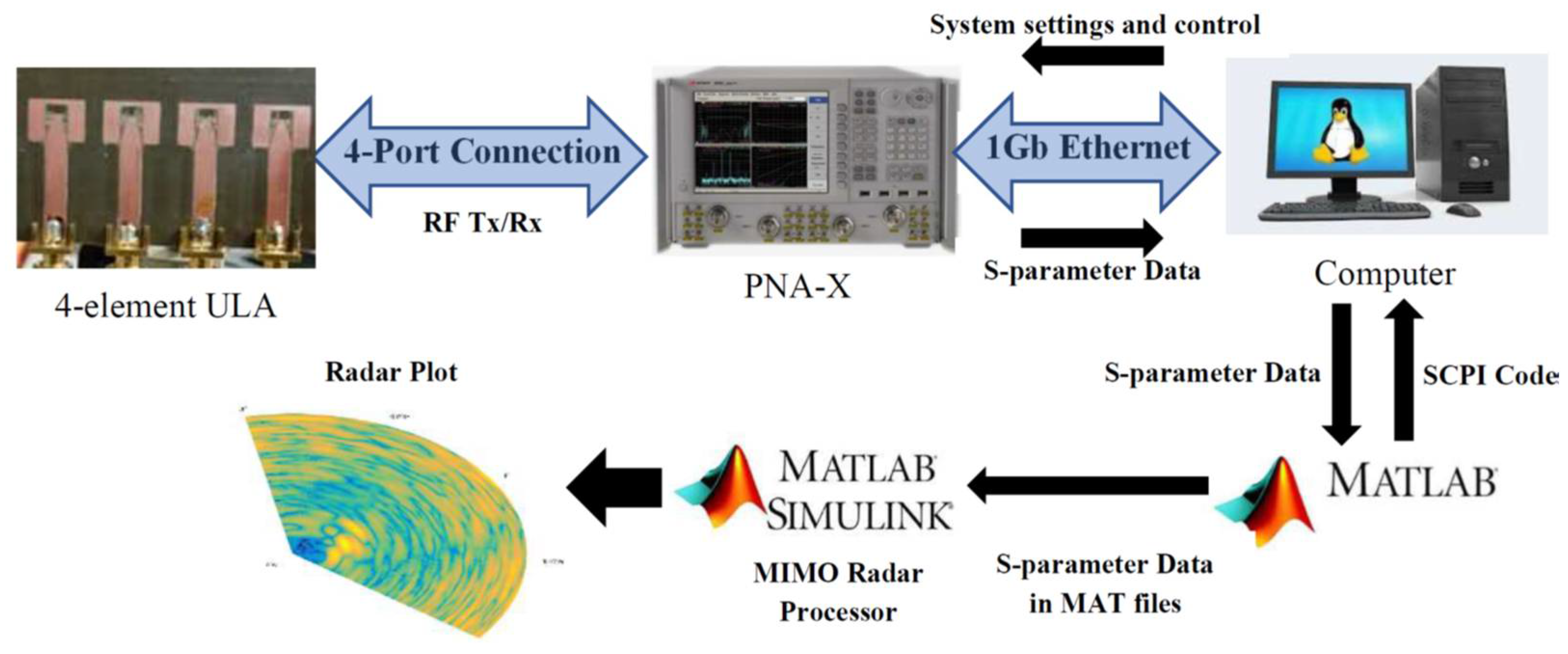
Figure 2 represents a high-level signal flow diagram for the implemented MIMO radar using the Keysight N5244A 4-port PNA-X network analyzer [
21]. Given that a network analyzer is specifically built to measure the phase coherent scattering (S) parameters between each of its ports, the instrument is well-suited and convenient to use as the RF front-end for the proposed MIMO system. The N5244A PNA-X is capable of transmitting and receiving stepped-frequency continuous wave signals, in TDM mode, from 10 MHz to 43.5 GHz with a dynamic range of 124 dB and output power of up to13 dBm.
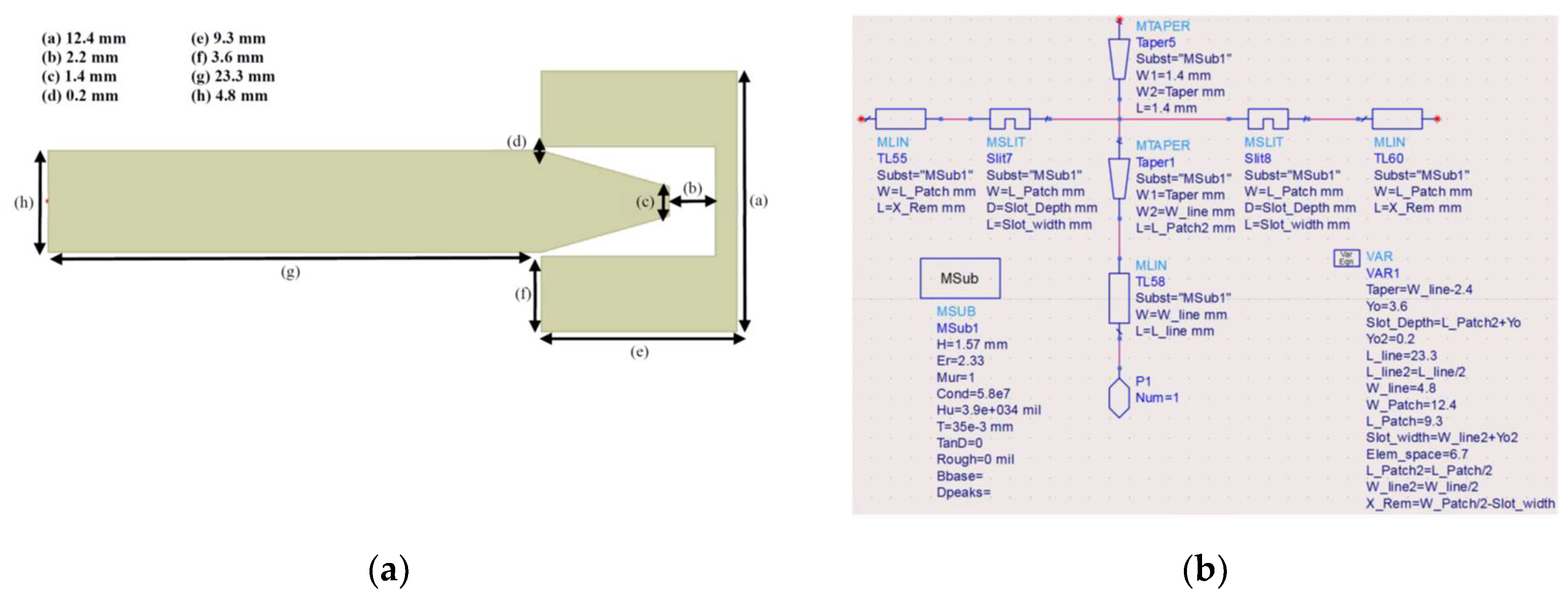
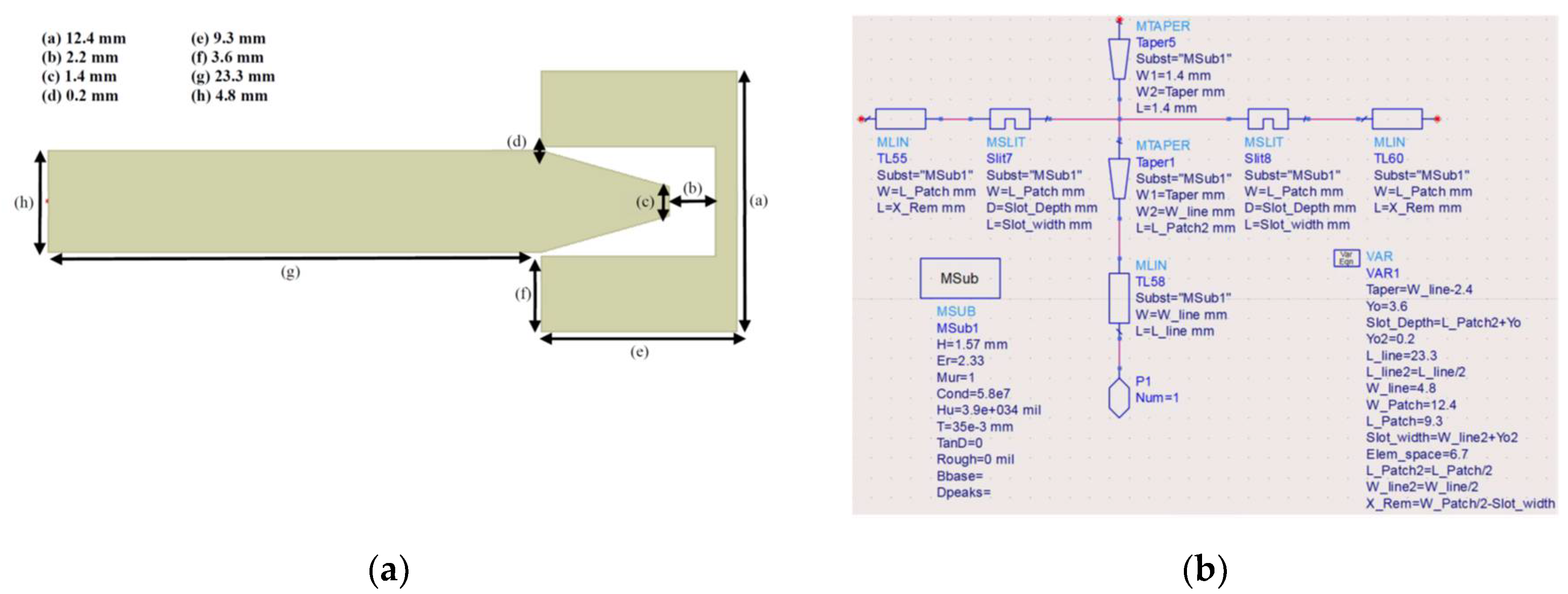
2.1. Antenna Array Design
The four test ports of the PNA-X are connected to a four-element microstrip patch antenna array. Microstrip patch antennas were chosen due to their compact size but they are inherently narrowband, which limits the range resolution. Therefore, to extend the bandwidth and improve the range resolution, a U-shaped broadband microstrip patch antenna, [
23,
24] was designed in Advanced Design System (ADS) [
25]. The ADS schematic outlining the dimensions of the antenna is shown in
Figure 3. The substrate used to fabricate the antenna is Taconic TLY-3 with a thickness of 1.57 mm and a relative dielectric permittivity, ε
r = 2.33 [
26]. The antenna was designed to operate at a center frequency of 8.9 GHz.
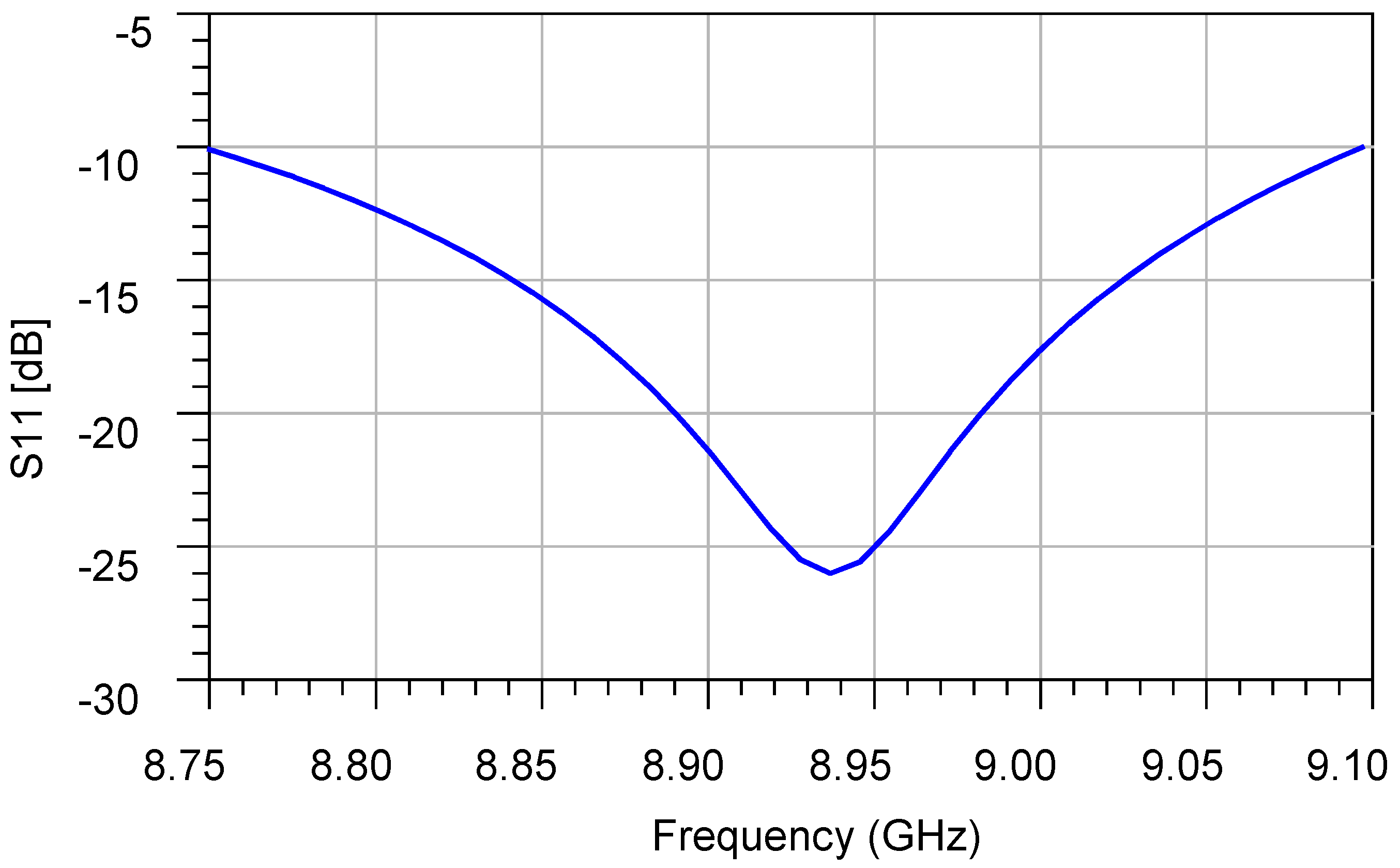
Figure 4 shows the S11 of an isolated single patch with an operational bandwidth of over 350 MHz at –10 dB allowing a range resolution of 43 cm [
27]. The U-shaped microstrip patch antenna was designed small enough so that the antenna spacing of the ULA could be set at half wavelength intervals of the center operating frequency.
Based on the S11 results of
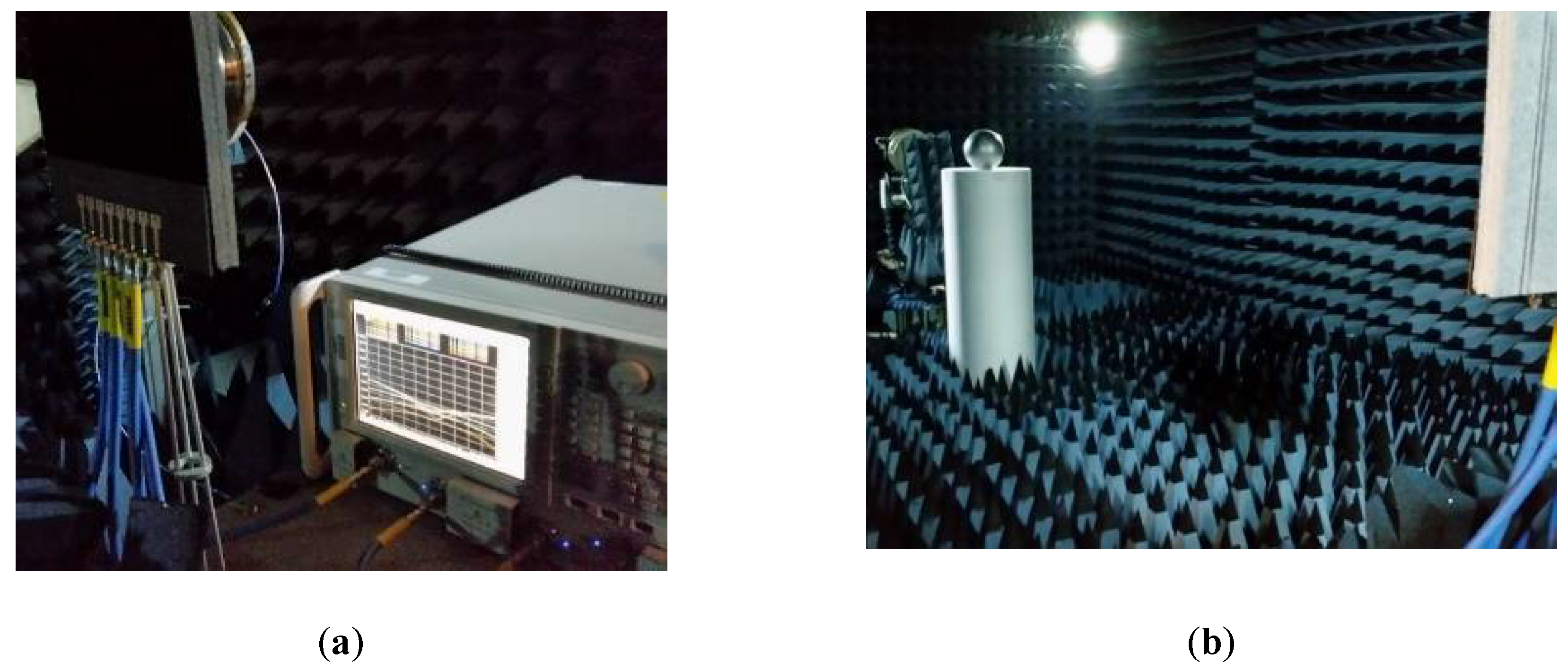
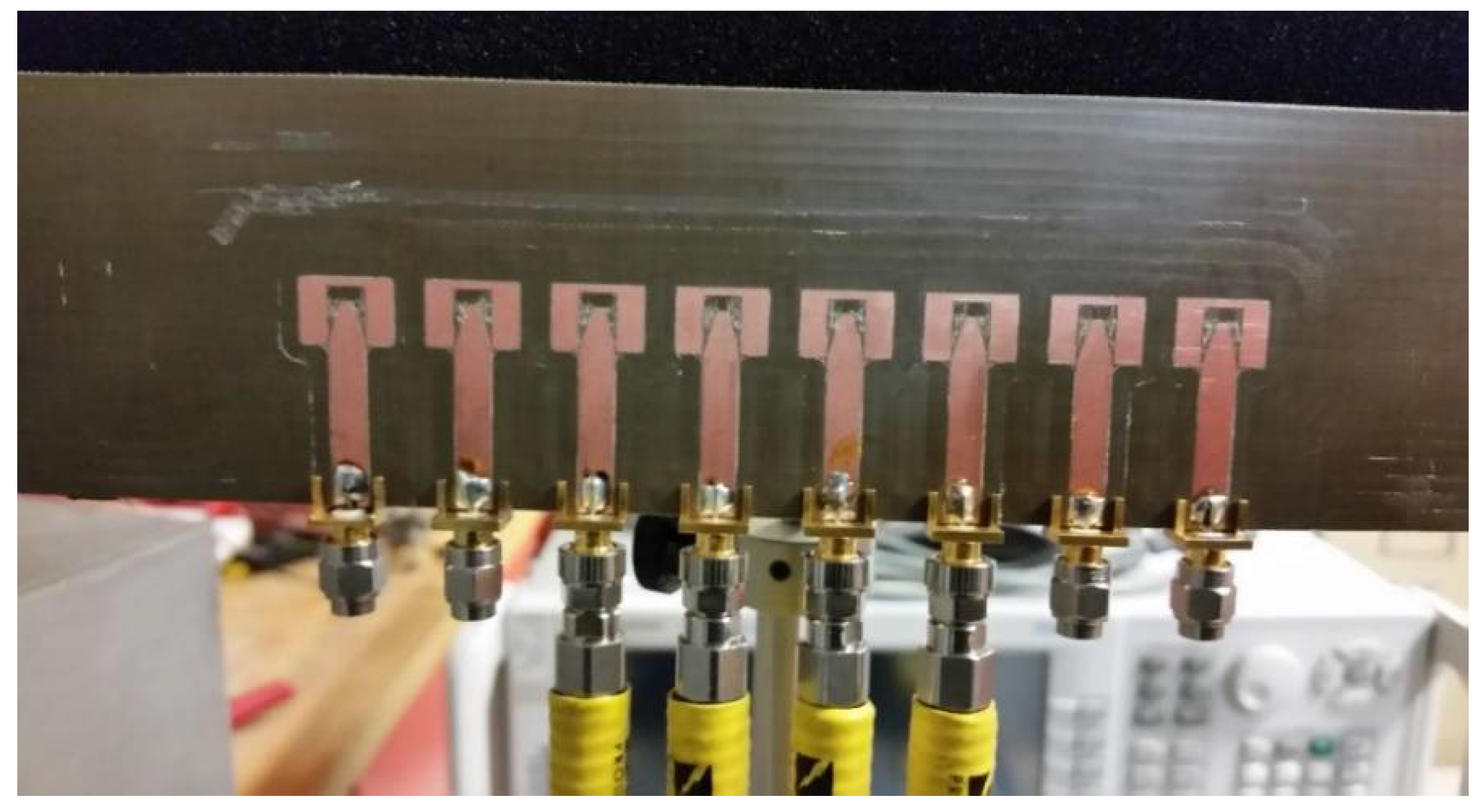
Figure 4, the center operating frequency was set at 8.925 GHz and the antenna spacing was set at 16.8 mm. Although the PNA-X network analyzer only has four ports, an 8-element ULA was fabricated for flexibility and possible future expansion.
Figure 5 shows a picture of the fabricated ULA.
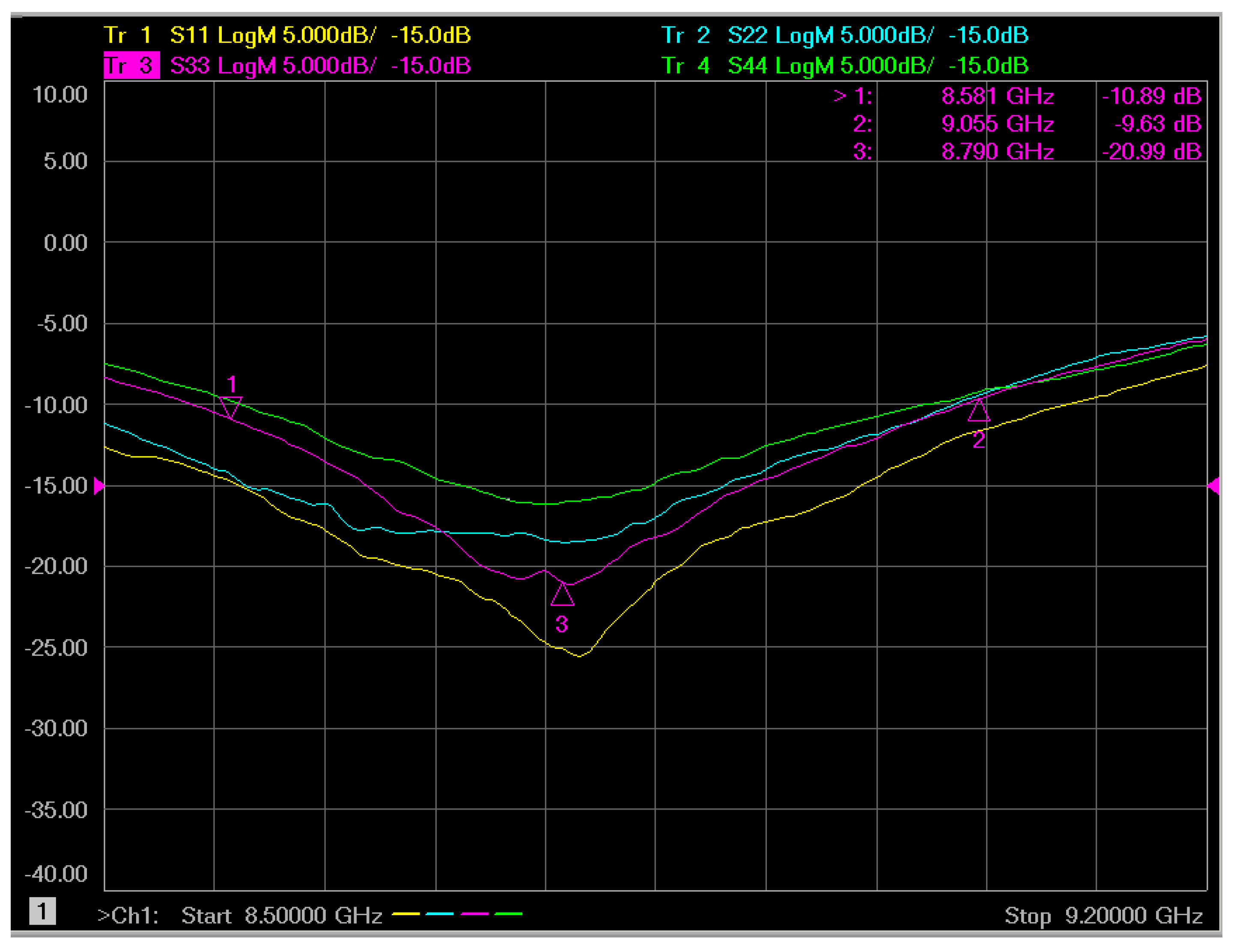
The S-parameters S11, S22, S33, and S44 of four individual elements in the array were measured using the N5244A PNA-X network analyzer. Each element was individually excited, and the rest of the array elements were terminated with 50 Ω matching loads. The results are depicted in
Figure 6, where it can be observed that the bandwidth increased for each antenna and that even for the worst measurement, S44, the –10 dB bandwidth increased to approximately 500 MHz compared to 350 MHz of the isolated element. Thus, MC obviously enhances the array bandwidth, which is beneficial for range resolution. It is also noted that the center operating frequency of all elements is approximately the same and shifted around 8.78 GHz compared to 8.925 GHz of the isolated element. The shift in center frequency, increase in bandwidth and differences in S-parameters responses is likely due to the accuracy of the machine that fabricated the ULA and the mutual coupling between antennas that was not accounted for in the isolated element. Therefore, to compensate for the frequency shift, the PNA-X was set to a center operating frequency of 8.78 GHz with a total sweep bandwidth of 450 MHz, providing a 33 cm range resolution. Without frequency compensation, the coupling can cause a target to appear at an angle different than it is in reality and can affect the accuracy of the angular resolution.
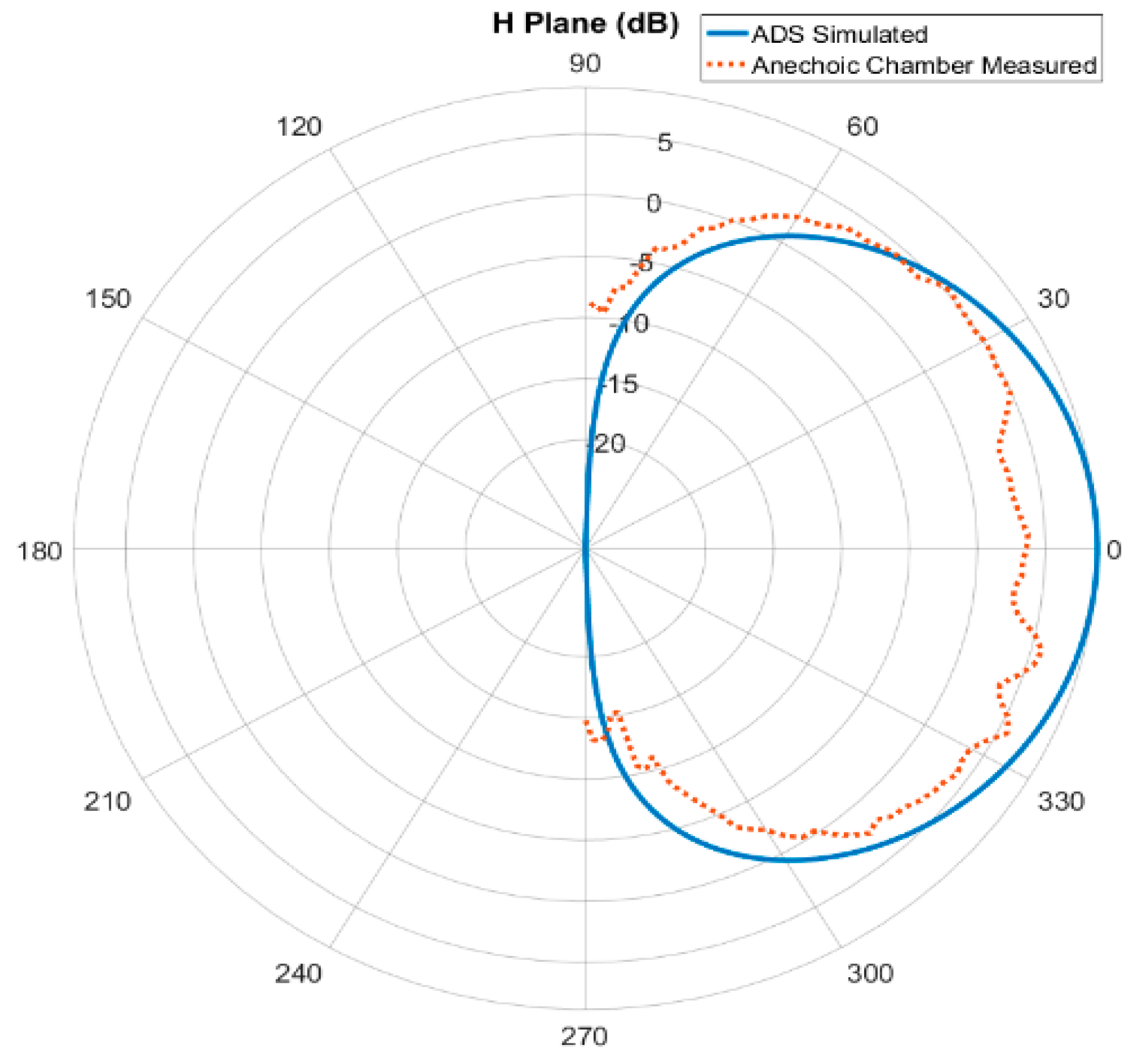
The ULA was mounted on a turret which rotated so that full E and H plane measurements could be taken. Prior to measuring the microstrip patch antenna, a calibration was conducted with a Model 3160 horn antenna at a frequency of 8.8 GHz. Since experimental measurements would primarily be conducted on the H plane using an azimuth radar scan, only H plane measurements are considered.
Figure 7 compares the experimental H plane radiation pattern of one element in the array with the isolated element which does not account for the coupling effects. The difference in the antenna pattern and gain could be attributed to the manufacturing accuracy of the machine, the mutual coupling between the closely spaced elements not accounted for in the isolated antenna pattern of the simulation, or from the absorber pad that was placed behind the ULA during measurements. As the main requirement of producing a broadband microstrip patch antenna was met, further antenna testing was not completed as the antenna met the minimum requirements of achieving less than a 1 m range resolution for a stepped-frequency continuous wave waveform MIMO radar.
2.2. System Setting and Control
The PNA-X is connected to a Linux computer running MATLAB/SIMULINK [
22] through a 1 GB Ethernet cable to form an IP network. The PNA-X is controlled locally from its front panel or remotely from the computer through several MATLAB functions using Standards Commands for Programmable Instruments (SCPI) code [
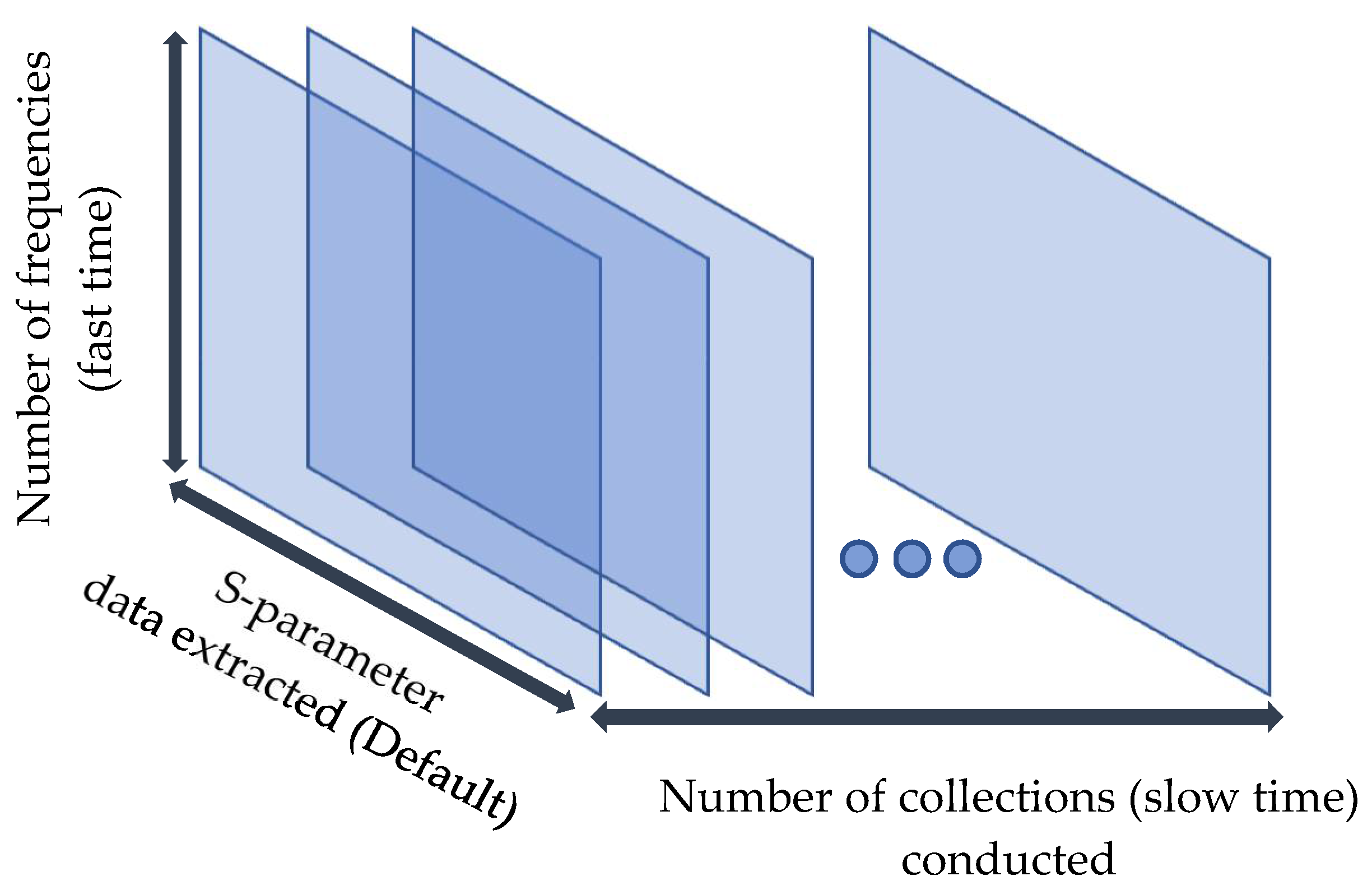
21]. The SCPI MATLAB function adjusts the settings on the PNA-X, such as frequency, IF bandwidth, power settings, number of samples, and the S-parameters to extract. The SCPI MATLAB function will save the S-parameter data in an I and Q format, which can be used as radar returns and can be processed by Simulink. Before running the SCPI MATLAB function, an electronic calibration using the Keysight N4692A ECal module is either performed or recalled from memory to balance the four channels. The S-parameters are organized in a data cube format as shown in
Figure 8 and are saved as a MAT file in MATLAB. The first dimension is defined by the number of frequency steps taken over a total specified bandwidth during the frequency sweep (fast time). The total bandwidth will limit the range resolution of the radar and was set to 450 MHz to respect the operational bandwidth of the microstrip uniform linear array (ULA) for all experiments. The second dimension of the matrix is defined by the number of S-parameters that are extracted. If all 16 S-parameters are extracted, which is the default setting, then the length of the second dimension will be 33, which corresponds to the received amplitude and phase for each S-parameter as well as a column for the current operating frequency. Four frequency sweeps are required to measure all 16 S-parameters. The last dimension of the matrix, slow time, is defined as the number of times the PNA-X will collect the specified S-parameters, which may then be used for coherent integration to increase the processing gain.
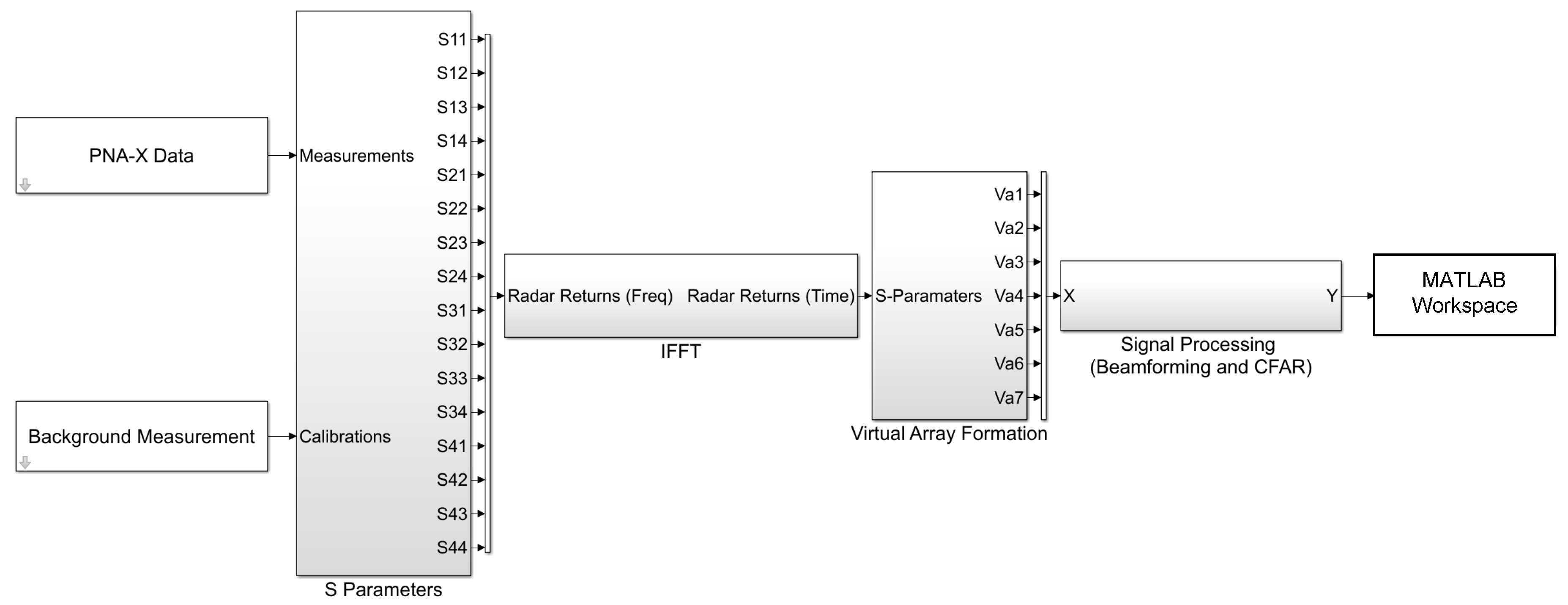
2.3. MIMO Radar Signal Processing
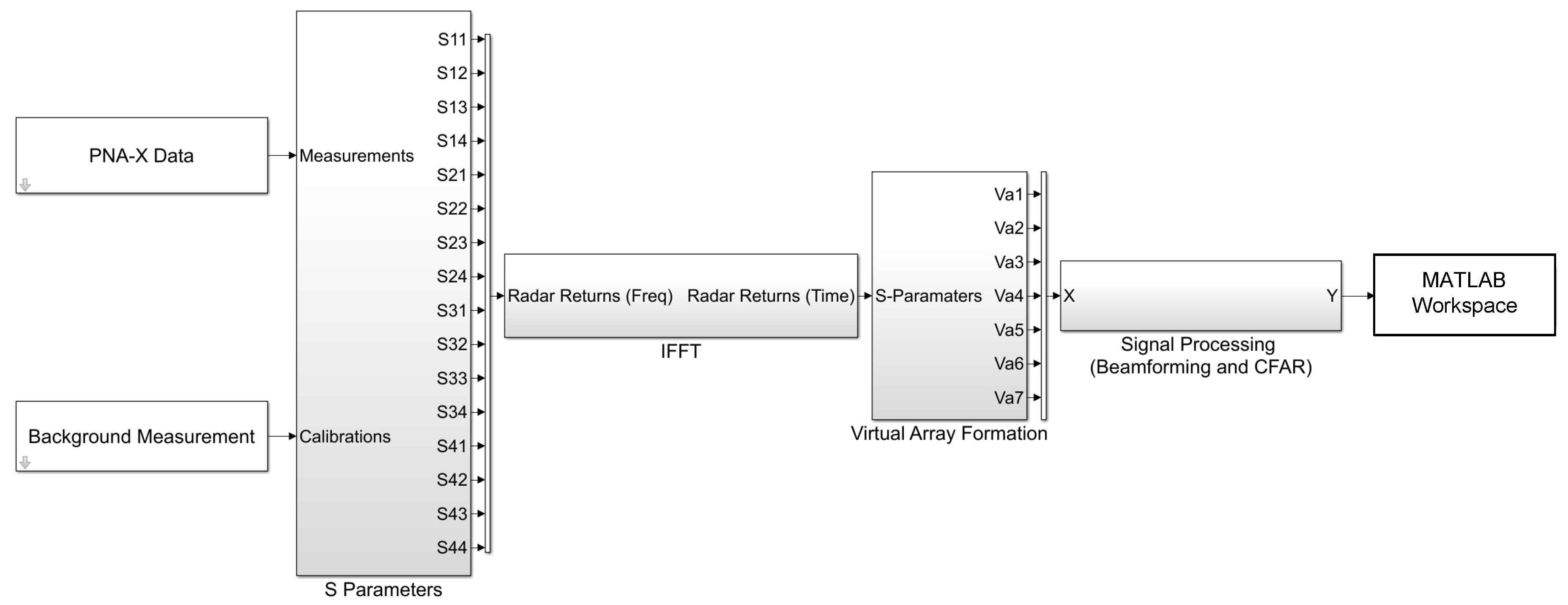
Knowing the format of the received data, a Simulink model was built to organize the S-parameters into a virtual array and to perform IFFT processing and beamforming so that range and angle information from targets could be extracted. The high-level Simulink model used to process the radar returns is shown in
Figure 9. In a laboratory setting, clutter may be removed by performing two sets of measurements: one with targets and another one with only the background.
The matrices of the PNA-X Data and Background Measurement from
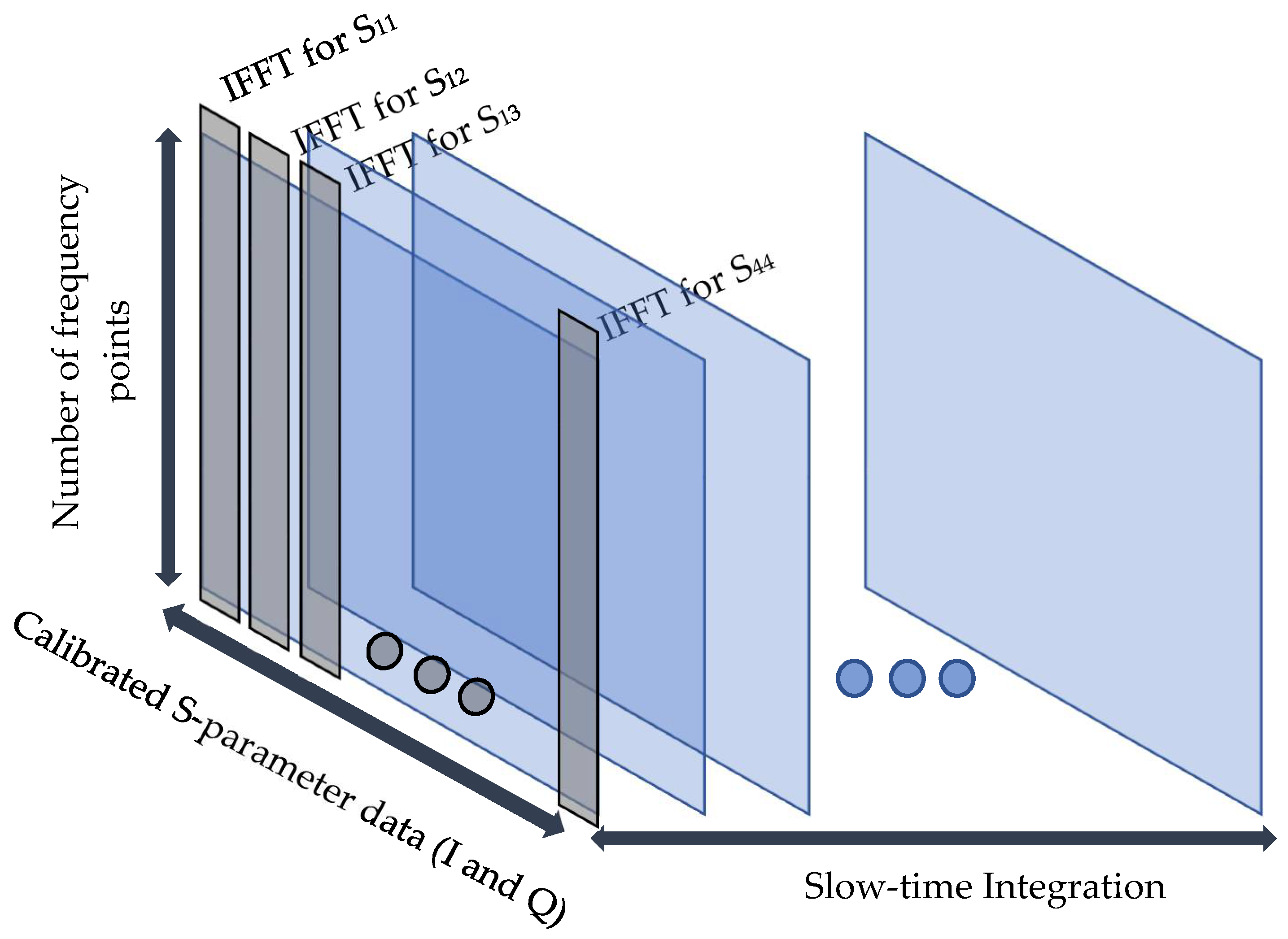
Figure 9 are measured with the same settings to ensure that they have the same matrix dimensions. These two matrices are the input to the Simulink model, which processes the data one sweep at a time. The data from both matrices are sent to the S-parameters block which subtracts the background measurement from the data with targets and converts the received data from amplitude and phase to I/Q data. The I/Q data are then sent to an IFFT block to convert the data from the frequency domain to the time domain. An IFFT is conducted on each S-parameter and then buffered over a specified coherent integration interval. As the data from the PNA-X are stored based on equal steps of frequency, the IFFT input is merely one column of data from the S-parameter matrix.
Figure 10 illustrates how the I/Q data are extracted for the IFFT and then integrated. The number of frequency points taken over the sweep bandwidth will define the maximum range of the radar, whereas the number of points taken in the IFFT will define the sample rate of the data in the time domain.
After the S-parameter radar returns are converted to the time domain, they are sent to the virtual array block for coherent integration and to create a virtual array. The virtual array block maps S-parameter data to specific virtual elements using several steps. Firstly, as TDM is being used to create orthogonality between transmitting waveforms, there is no cross-correlation between transmissions and the same waveform is being transmitted across all transmitters at different times. Therefore, only a single matched filter is required for each virtual element for TDM. If simultaneous
transmitted orthogonal waveforms were used,
matched filters would be required. As there is no risk of cross correlation between transmitting waveforms by using TDM, the received signals from individual elements can be mapped directly to a virtual element as follows:
where
and
are the numbers of transmitting and receiving antennas, respectively,
and
are the physical locations of the
mth transmit element and the
nth receive element.
Since four elements are being used in the MIMO radar system, the minimum coherent processing interval (CPI) to create a virtual array when using TDM is four times the sweep time. Using a 4-element ULA in a monostatic scheme and using the spatial convolution from (2), the received signals will be mapped to virtual elements following the logic rules found in
Table 1. The result is a 7-element virtual array that will have an identical two-way pattern as the phased array radar’s 4-element array. The virtual array buffers the returns from the four frequency sweeps and then performs a summation of the returns in slow time across each virtual element to form the virtual array.
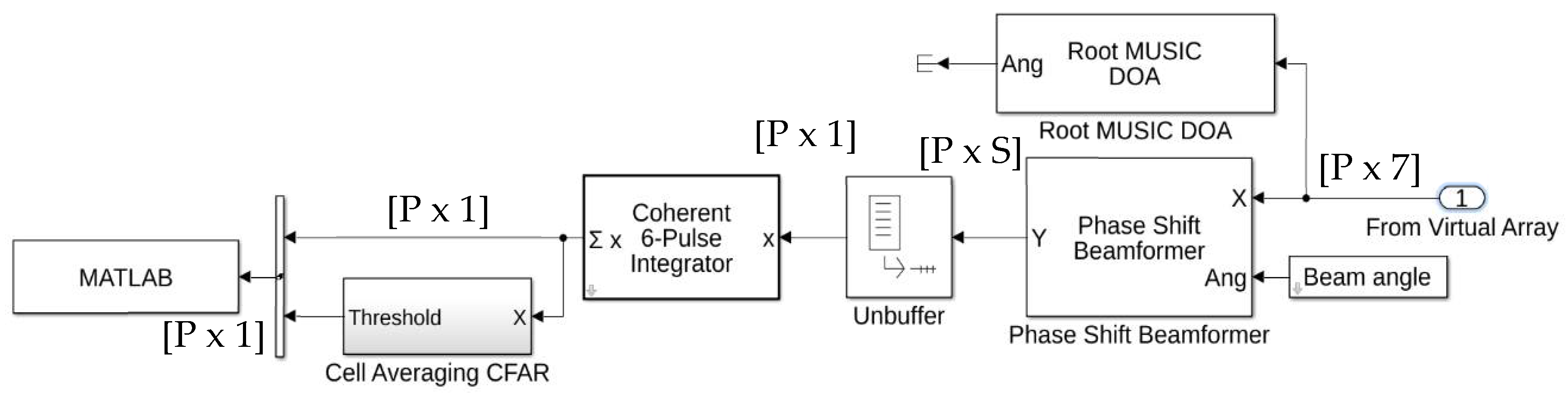
The high-level architecture of the signal processing techniques used in the MIMO radar is depicted in
Figure 11. It consists of
P range bins and
S scan angles using 7-elements virtual array.
Although this paper did not explore high-resolution beamforming techniques such as MUSIC or ESPRIT [
27,
28,
29], a Root MUSIC DOA Simulink block is included in
Figure 11 to demonstrate where it could be implemented. The phase shift beamformer block uses the virtual array with appropriate element weights as a reference to perform beamforming. The MIMO radar uses an Unbuffer block to process the radar returns at one scan angle at a time.
2.4. Cell-Averaging CFAR Detector
After coherent integration, the radar returns are sent to a cell-averaging constant false alarm rate (CFAR) detector to determine the presence or the absence of a target. An echo return from a radar will either contain returns from a target plus some interfering noise or just interference such as receiver noise or sea clutter. Interference can cause a radar to miss detecting a real target or can sometimes lead to detecting false targets. The probability of either of these occurring depends on the SNR, which is the ratio of the return signal strength and the variance of the noise level. Therefore, the SNR will define the probability of a target being above a specific threshold, or probability of detection, PD, as well as the probability of the noise creating a false alarm above that same threshold, PFA.
Selecting the proper detection threshold is done through random process modeling and statistical analysis where a single target detector must decide between two hypotheses [
30]:
where
H0 is the null hypothesis representing the background white Gaussian noise
, and
H1 is the target return
plus noise. The received radar signals are considered Gaussian random processes; therefore, two probability density functions (PDFs) can be defined as
py(y|H0) and
py(y|H1).
Figure 12 illustrates an example of both PDFs depicting the areas associated with different probabilities [
27]. The distance separating the means of the two PDFs is related to the SNR. Increasing the SNR will further separate the two PDFs, lowering the overlap between them, thus increasing P
D and lowering P
FA. Another method to increase the SNR is to lower the variance of the noise as this will also reduce the amount of overlap between the two PDFs. For any radar measurement,
y, the generalized likelihood ratio test (GLRT) decision rule can be applied [
31]:
where
is a detection threshold defined for a given
PFA.
It can be shown that (4) can be reduced to form a square law detector [
27]:
and that since the magnitude of the noise follows a Rayleigh distribution, the detection threshold,
T, must satisfy the following equation:
where
is the variance of the noise. Generally, a cell-averaging CFAR detector will use (4) to set the threshold for individual resolution cells of the radar. It will do this by measuring the returns of neighbouring cells to determine
and apply it to (4) with a user-defined P
FA. Guard cells are commonly used around the cell under test so that if a target is present, it does not artificially increase
.
After the coherent integration and CFAR detector, the processed MIMO radar returns are sent to MATLAB’s workspace for plotting and analysis.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}