Empirical Performance Models of MAC Protocols for Cooperative Platooning Applications


Abstract
:1. Introduction
- Motivation and verification that network performance follows consistent behaviours as meaningful wireless conditions (e.g., the number of RF neighbours) change, for a variety of MAC protocols;
- Empirical models of the relationship between network metrics and wireless conditions fitted to simulation observations of platooning scenarios;
- Verification that the models hold through a range of values of relevant parameters, namely average platoon sizes, number of occupied lanes and transmit power.
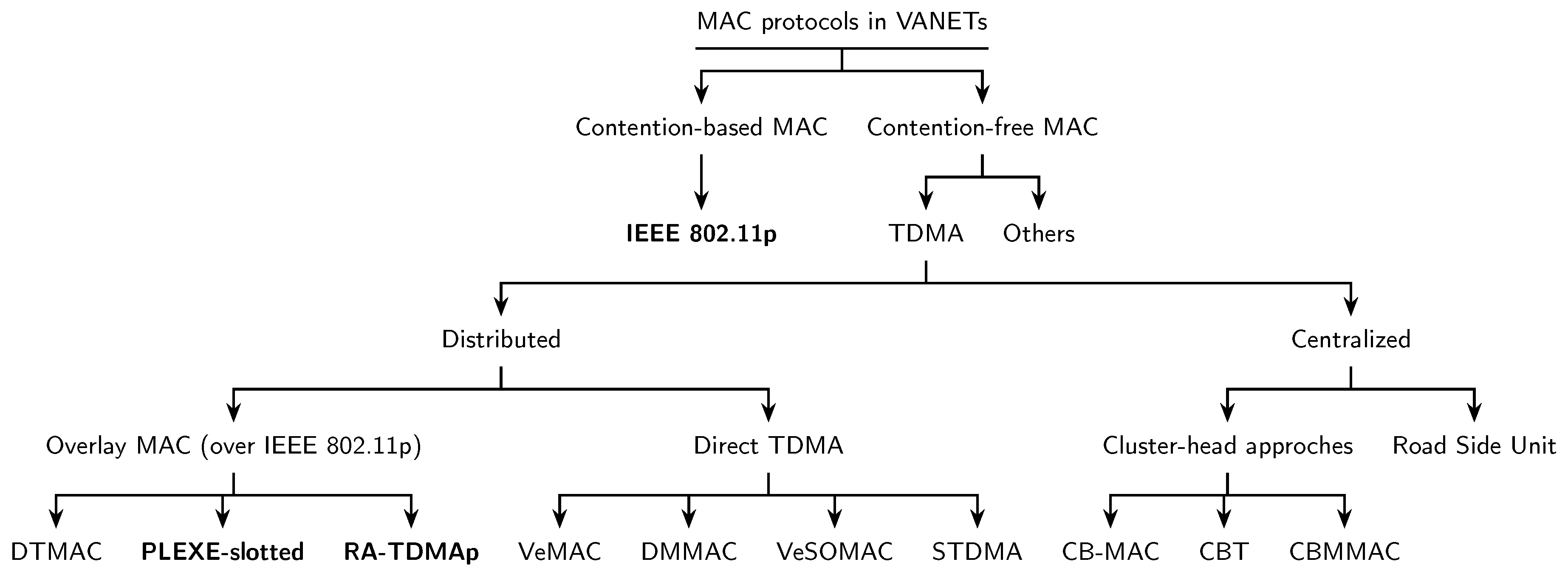
2. Surveying TDMA-Based V2V Communications
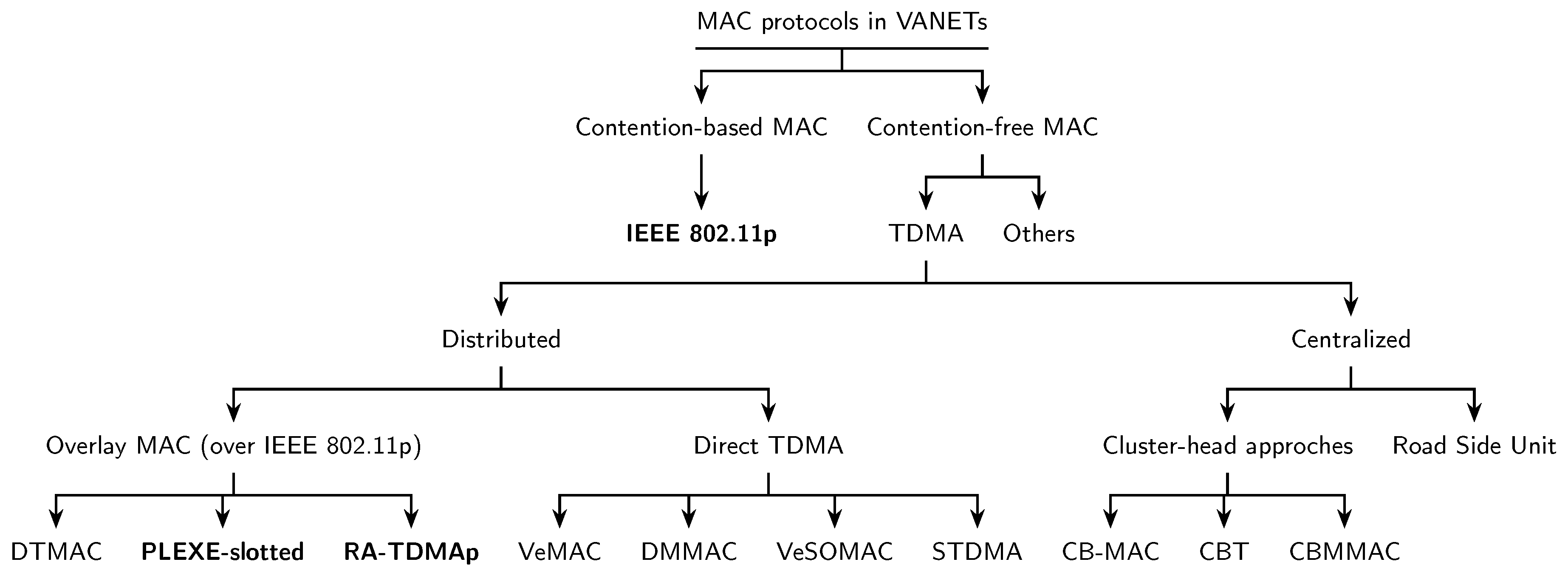
2.1. TDMA-Based MAC Protocols
2.2. Analytical Models of Medium Usage
3. Motivation and Methodology for Empirical Models of MAC Protocol Performance
3.1. The Three Tested MAC Protocols
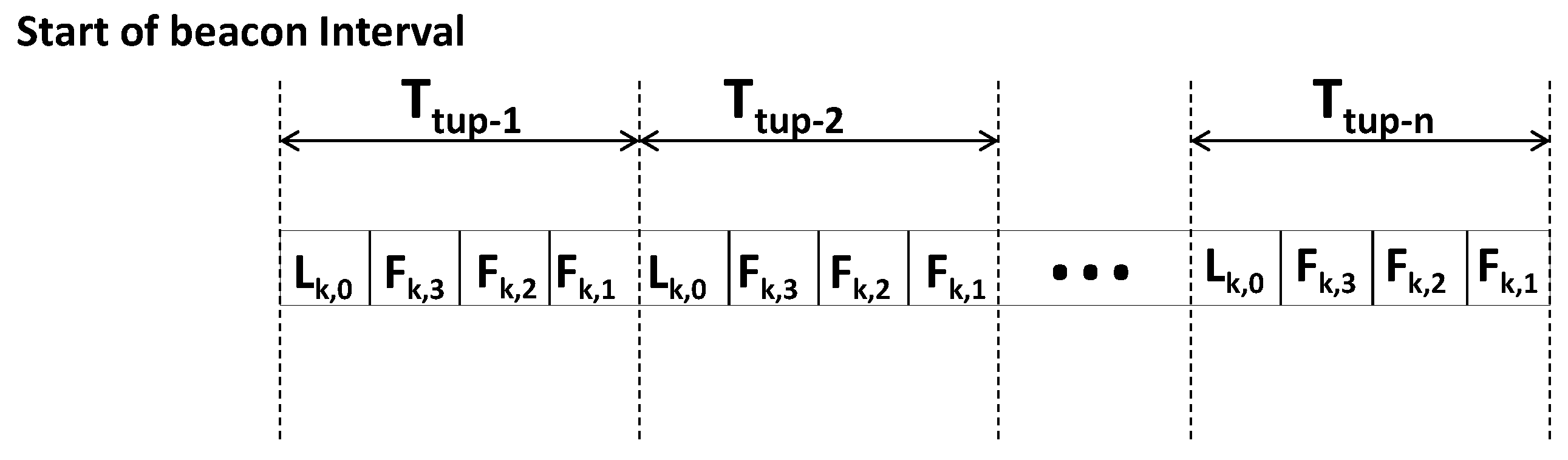
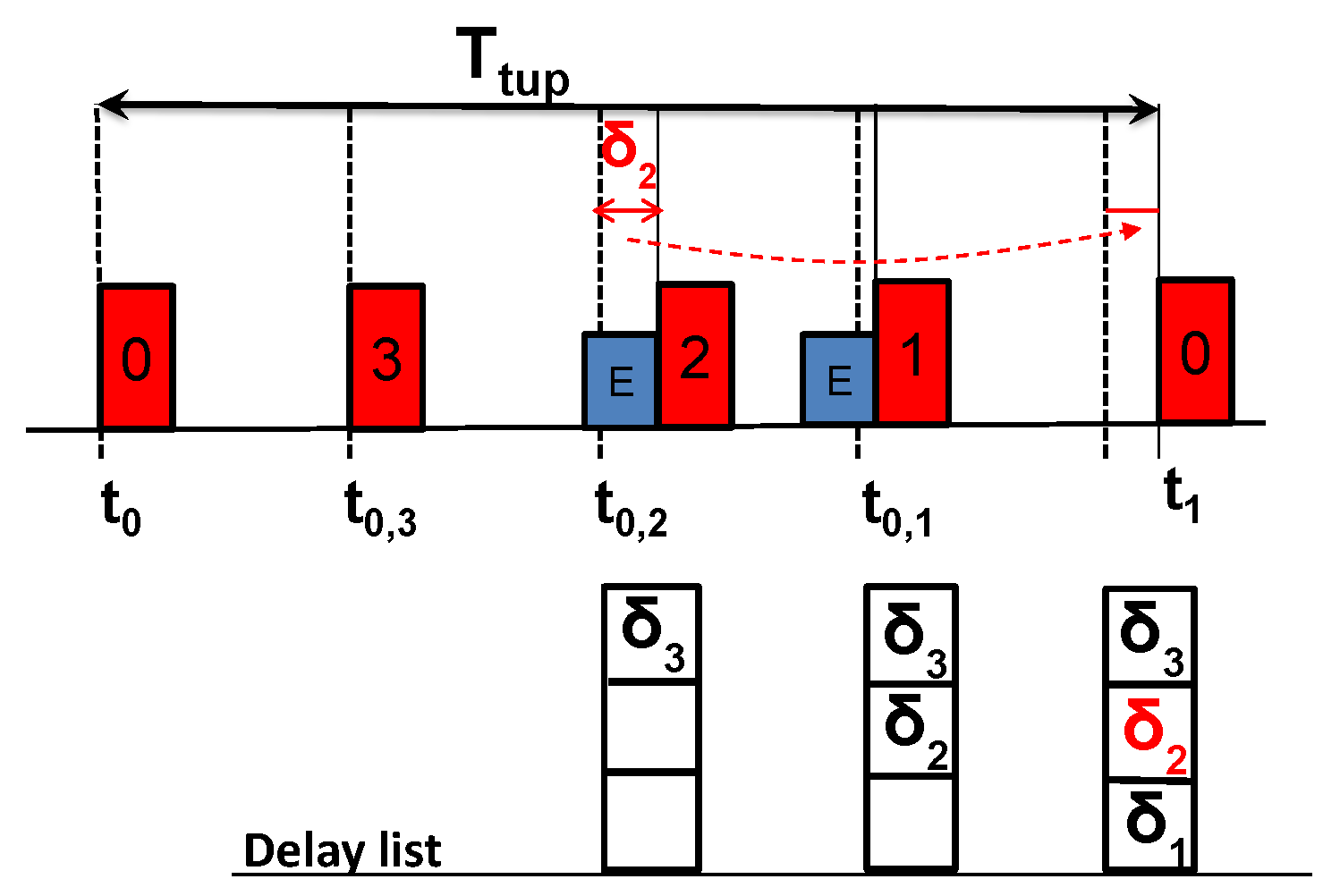
| Algorithm 1 RA-TDMAp protocol |
|
3.2. Network Metrics as a Function of Scenario
3.3. Relevant Metrics and Parameters and Simulation Setup
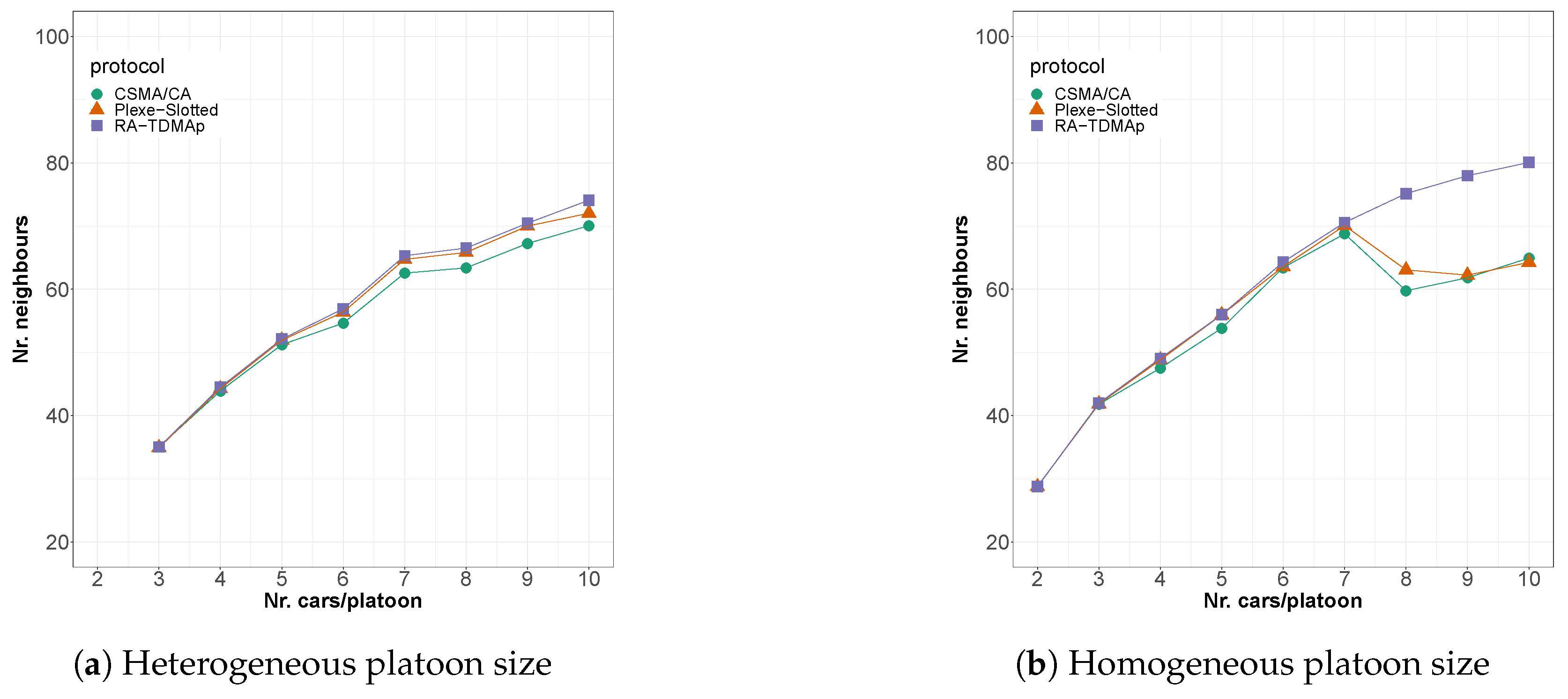
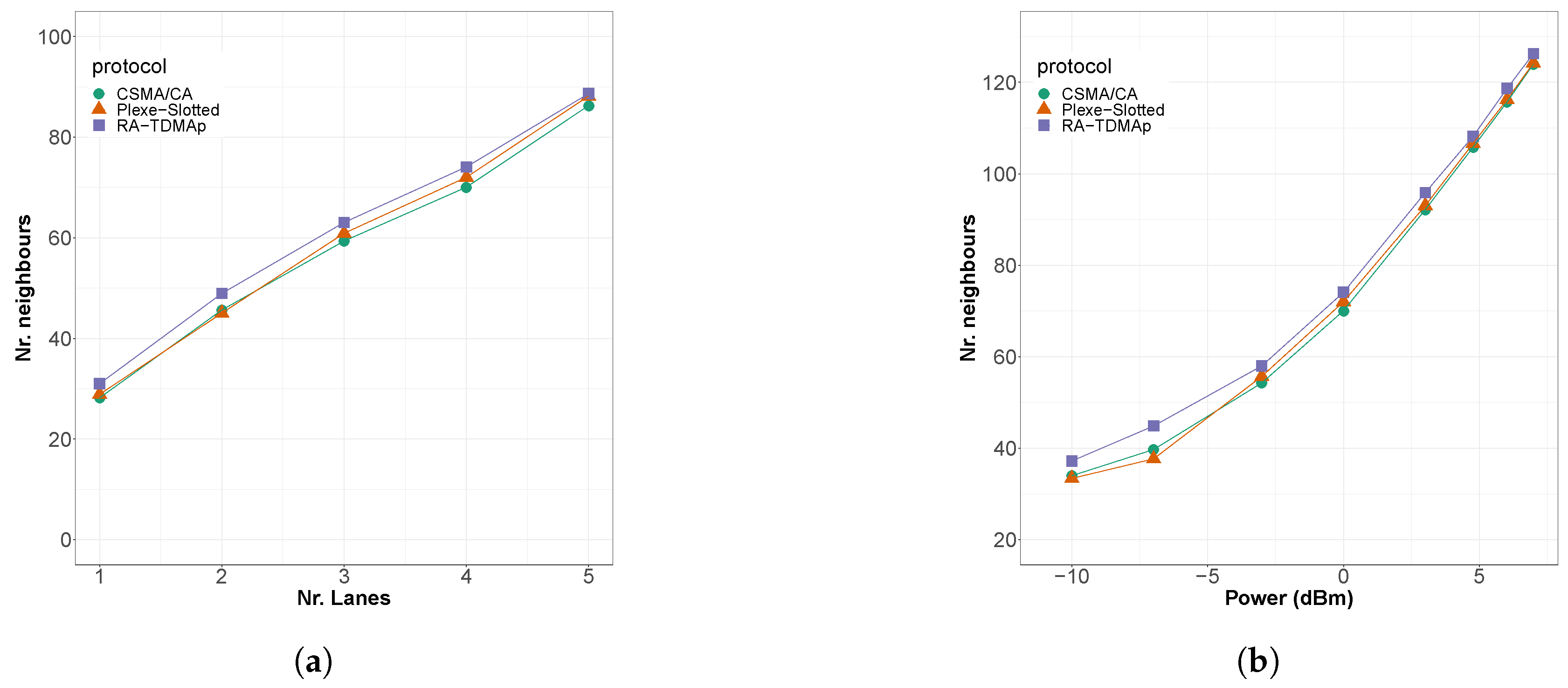
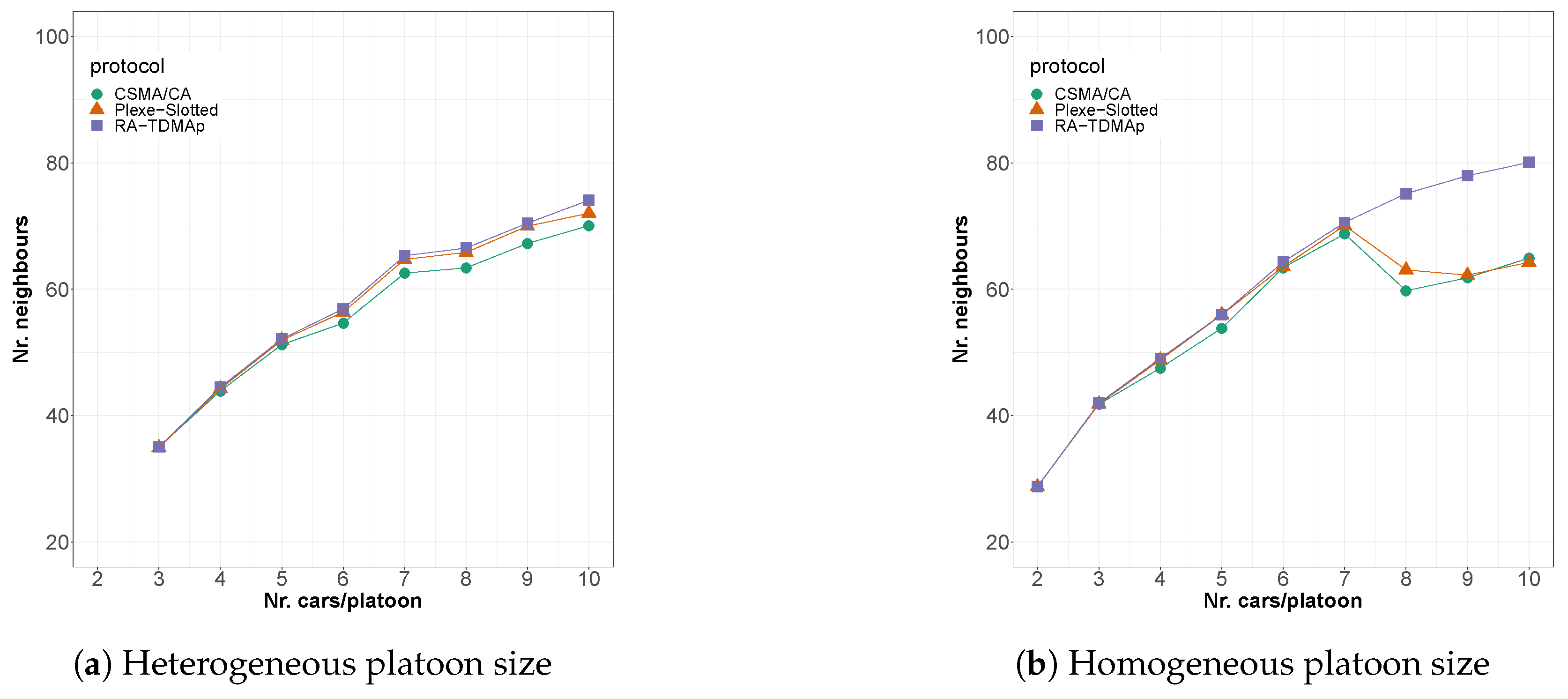
- Number of RF neighbours: The number of different sources of the beacons correctly received by a vehicle per second.
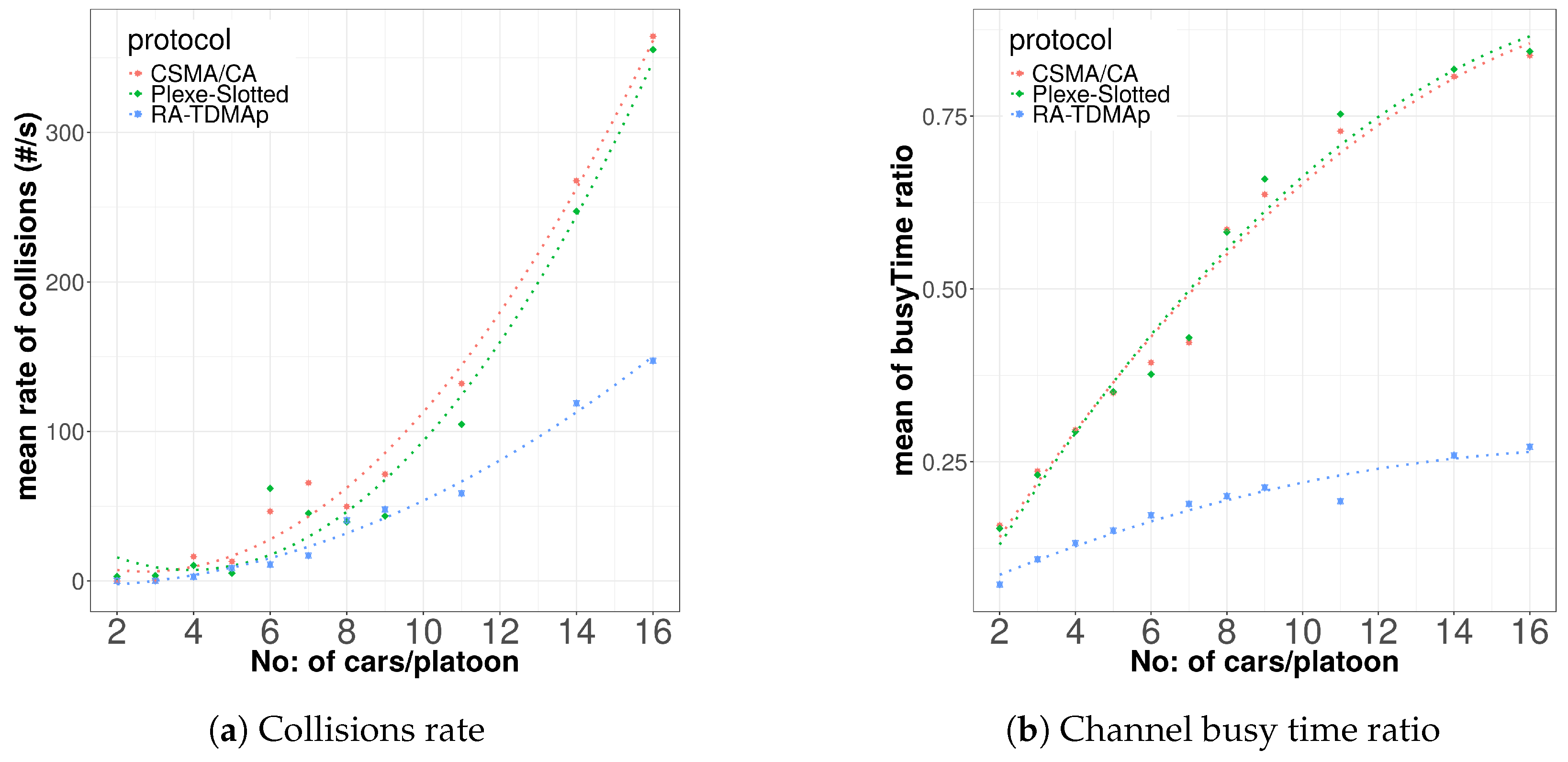
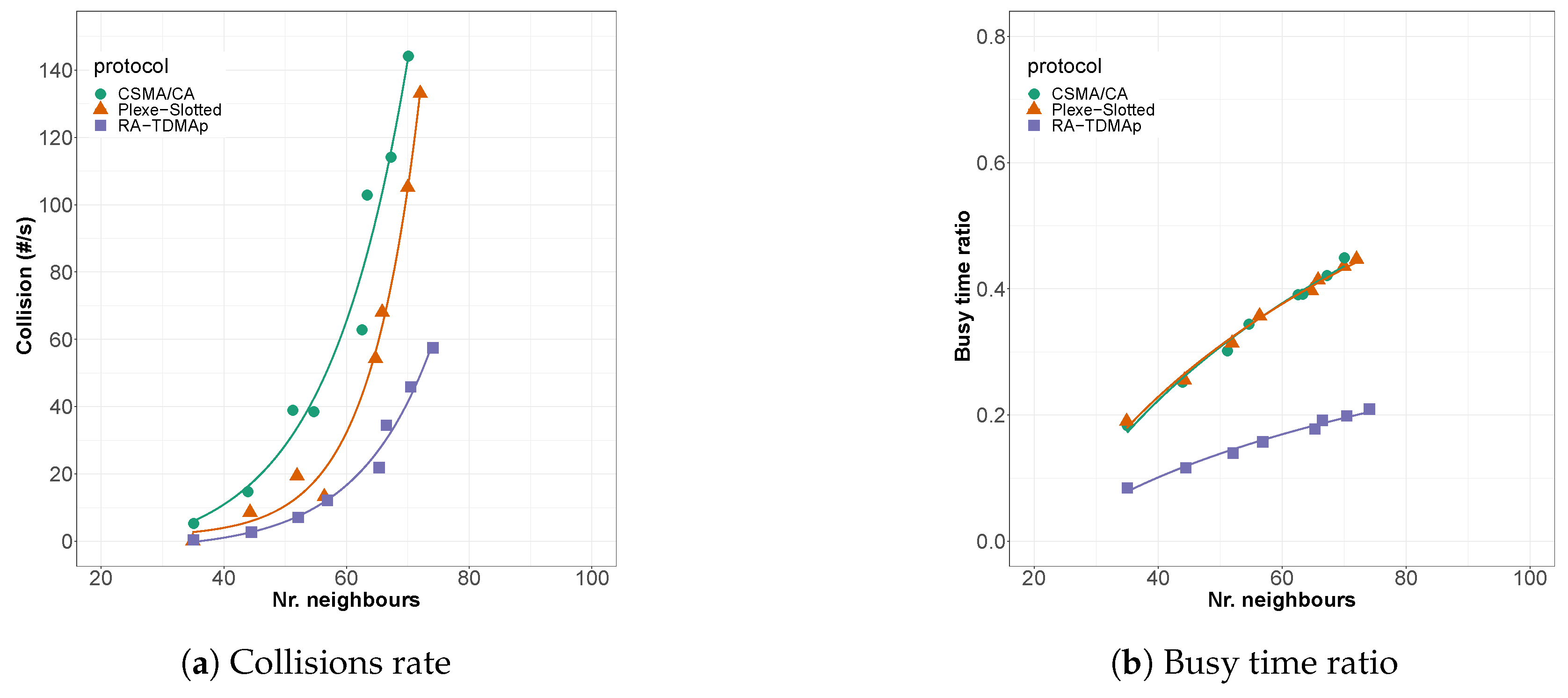
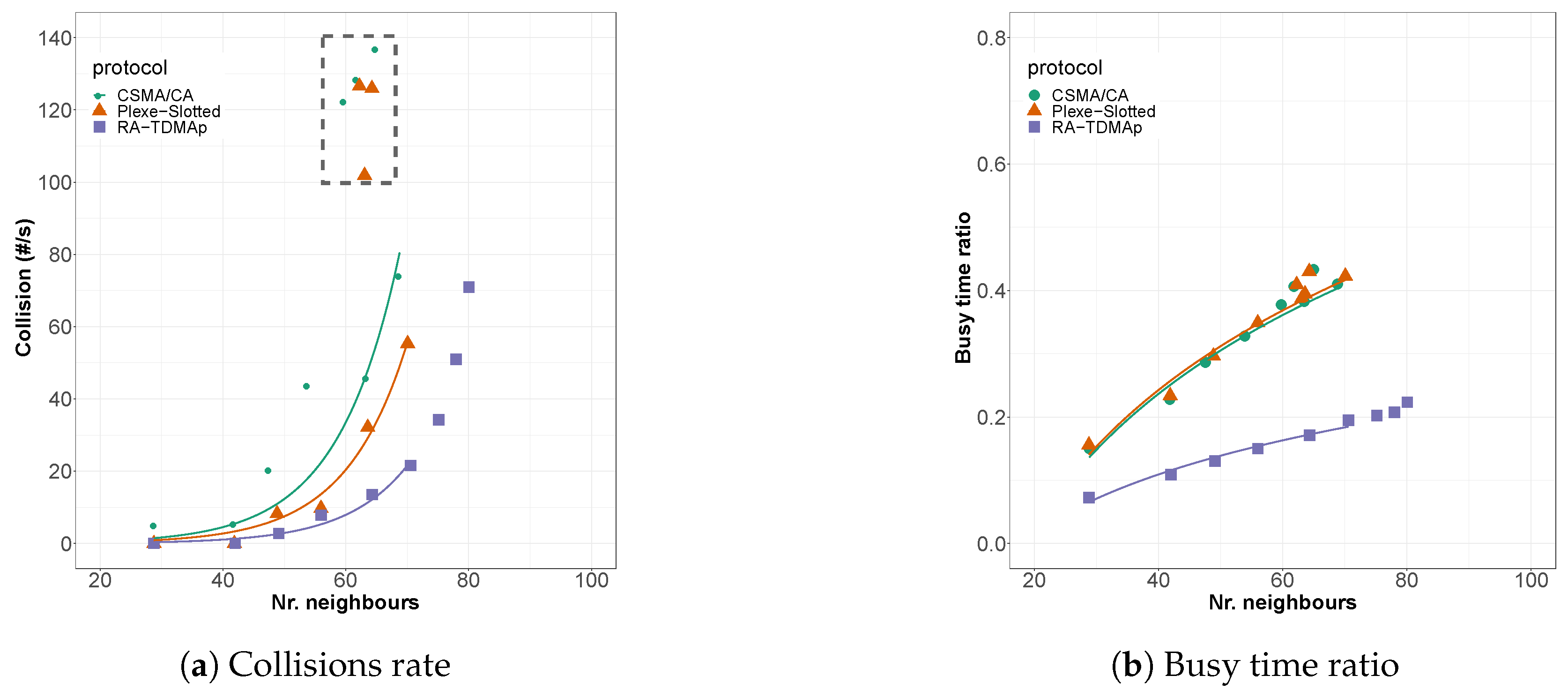
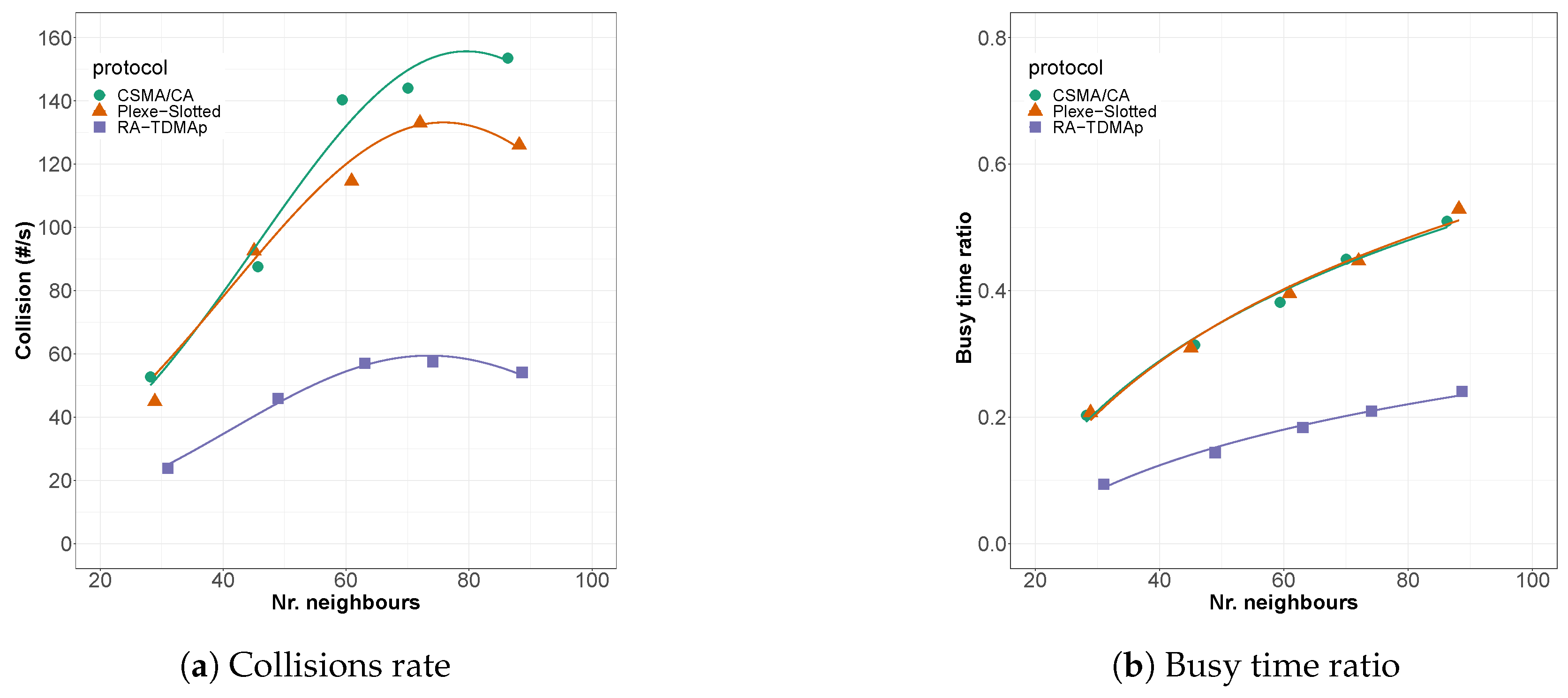
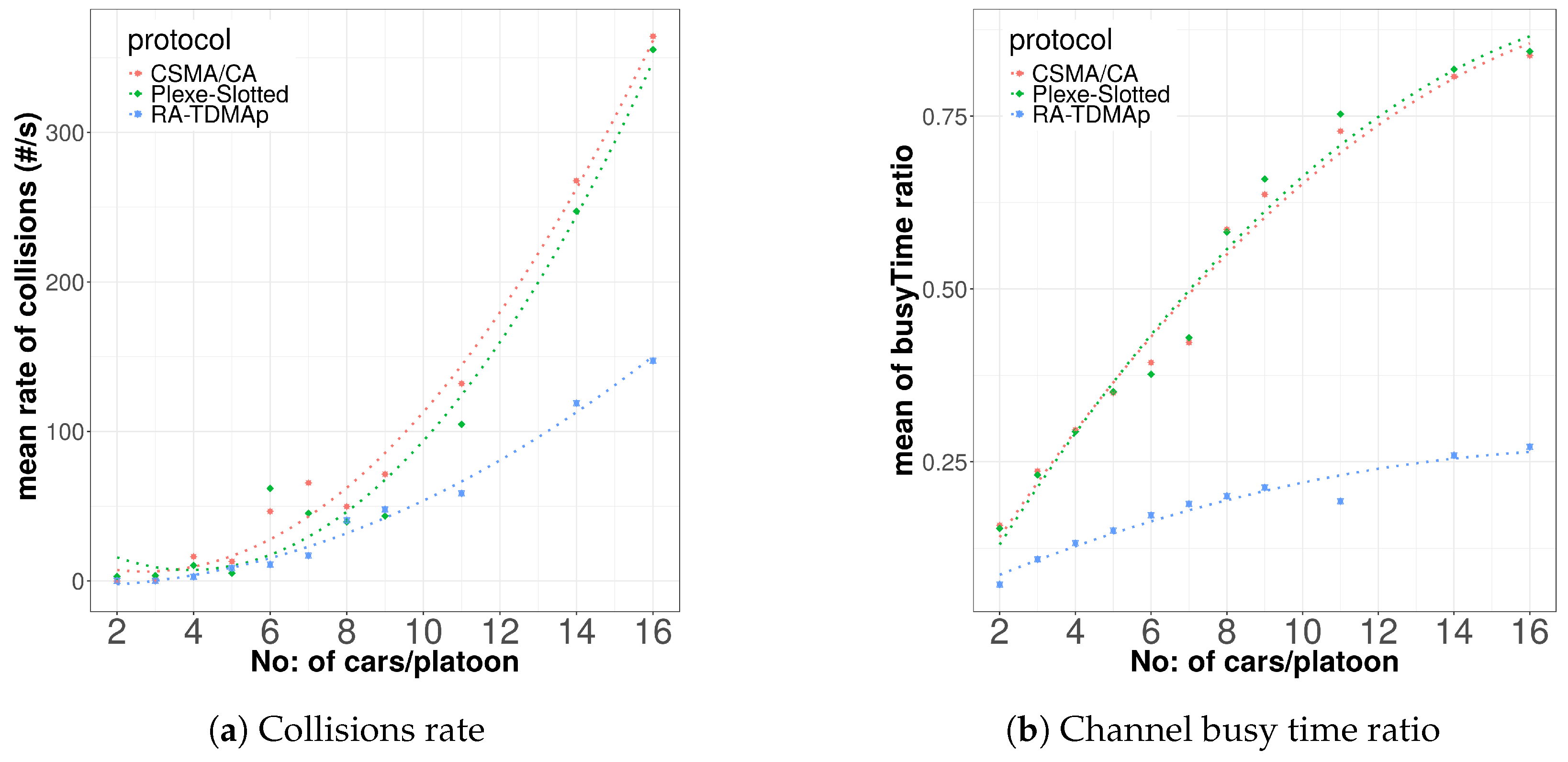
- Collisions rate: The packets lost due to a collision between interfering transmissions per unit of time;
- Busy time ratio: The ratio of time that the physical layer at each node observes the channel busy.
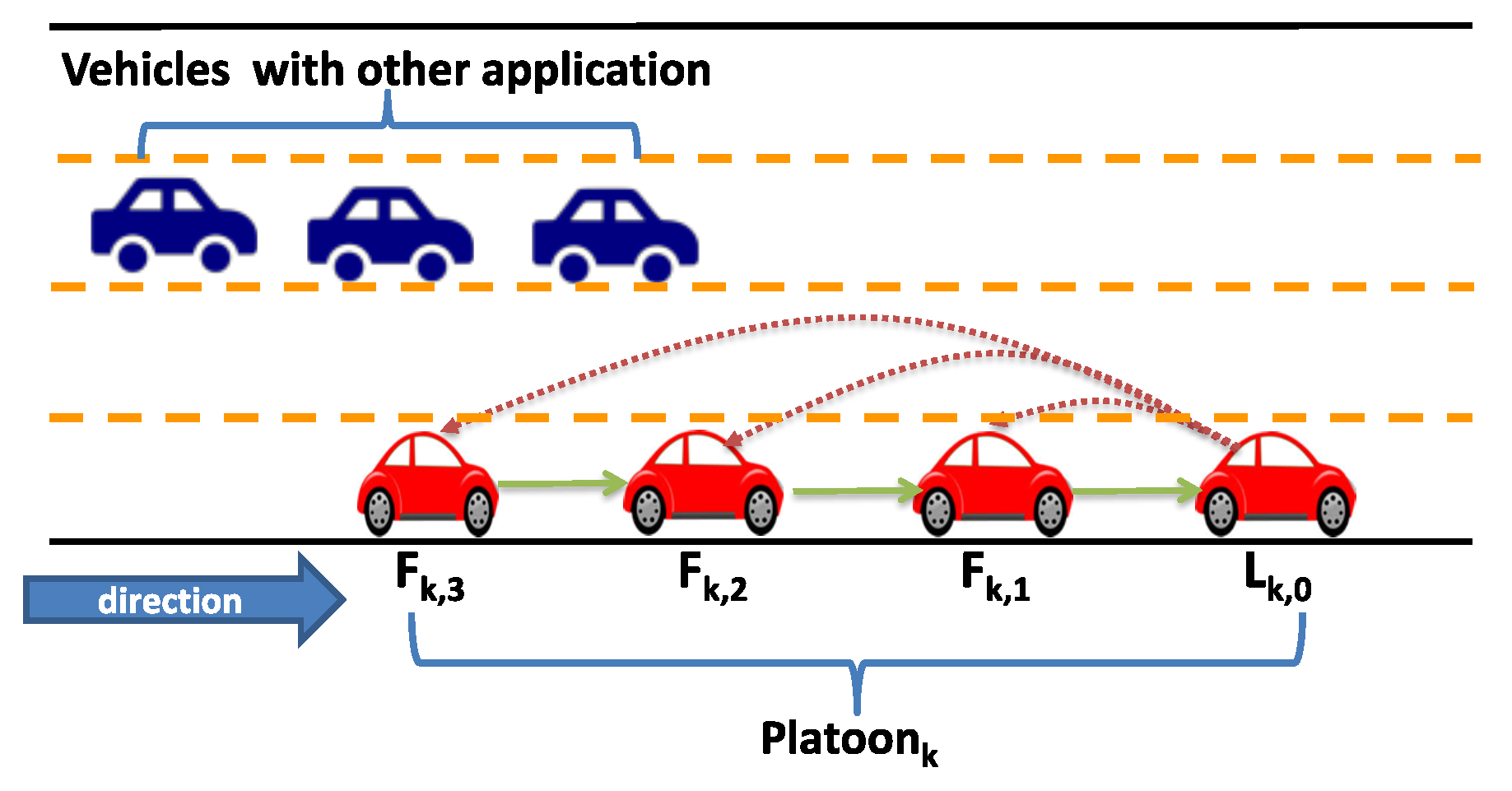
- Platoon Size: this parameter change has several effects: (i) It increases the frequency of messages transmitted during a round (round duration remains constant, while follower slots decrease); (ii) it decreases the ratio of leaders to followers; and (iii) while the communication range is not filled with neighbours, it leads to an increase in the number of observable neighbours.
- Platoon Size Homogeneity: The size homogeneity concerns whether platoons have the same size (homogeneous platoon sizes), or variations between them around a known average (heterogeneous platoon sizes). In the first case, all platoons have the same integer number of nodes N. In the latter, we draw platoon sizes from a uniform distribution , in which the mid-point is N; this strategy is expected to cause the average platoon size to be N, allowing for a fair comparison with the homogeneous-size counterpart scenario.
- Number of Lanes with Traffic: Increasing the number of lanes with traffic leads to an increase in the number of neighbours over a particular spatial layout. If a single lane is considered, increasing the platoon size may not lead to an increase in the number of neighbours (if neighbours exist up to the communication range); allowing traffic in adjacent lanes, however, immediately introduces a large number of neighbours to individual nodes.
- Transmit Power of Followers: Changing the transmit power of followers causes the communication range of individual nodes to increase. Note that leaders transmit with high power, already reaching all nodes in the simulated area.
4. Empirical Models
4.1. Platoon Size and Homogeneity, and Coherence between Rounds of Platoons
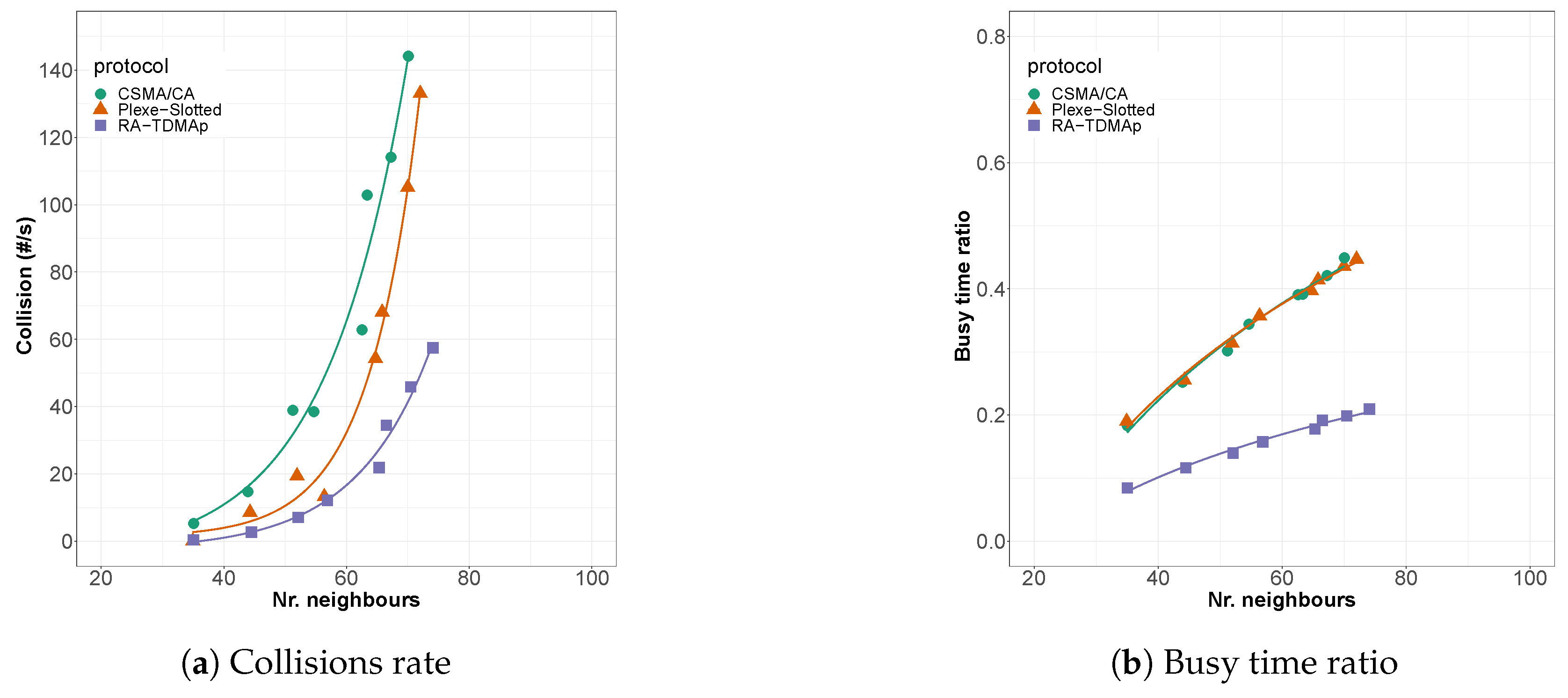
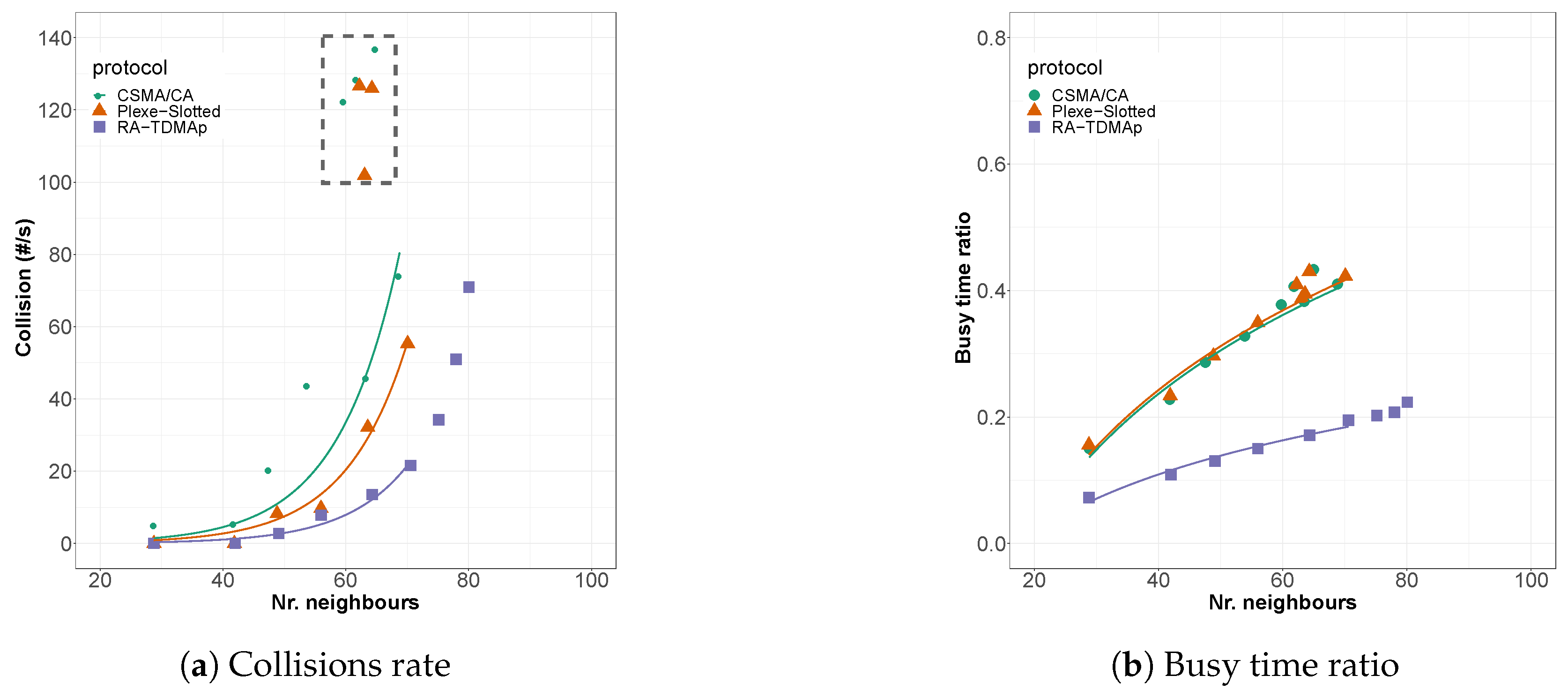
4.2. Network Metrics In and Out of High Coherence
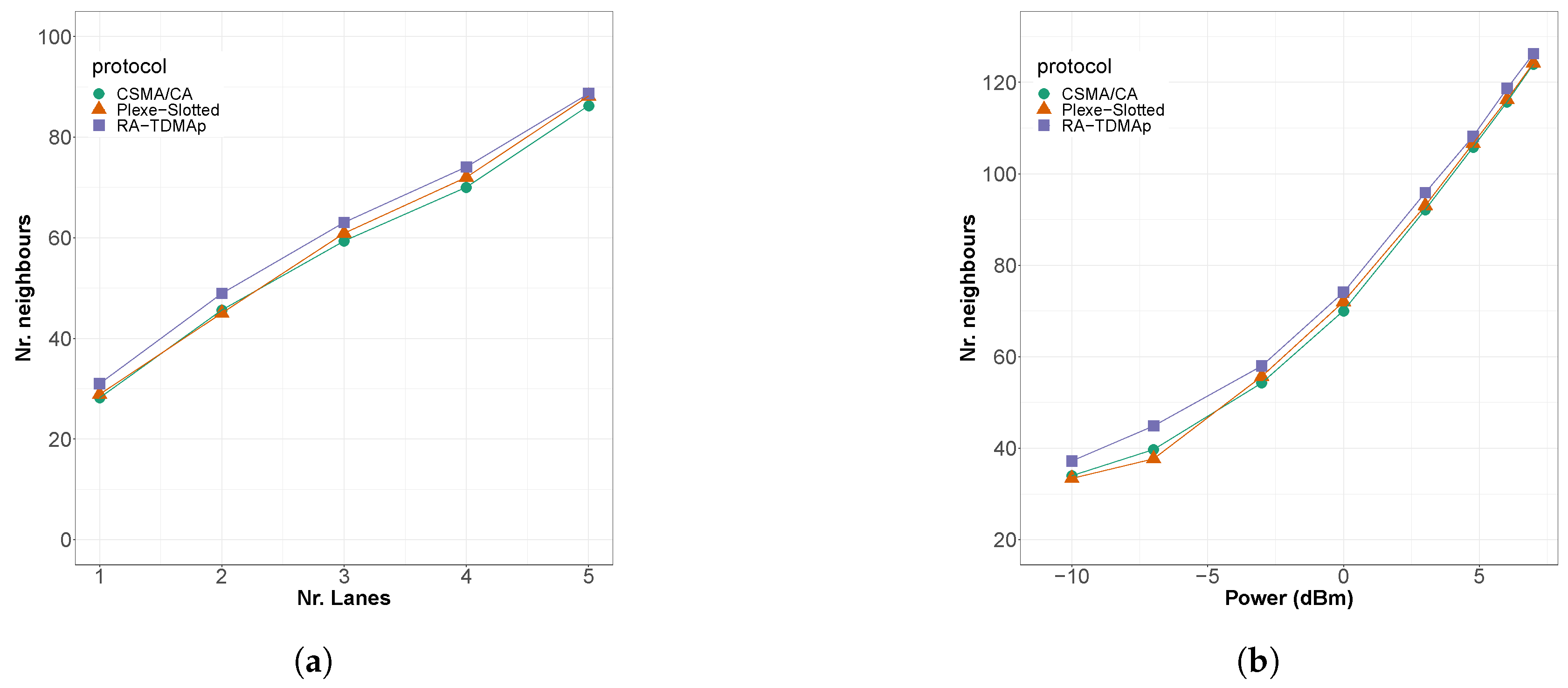
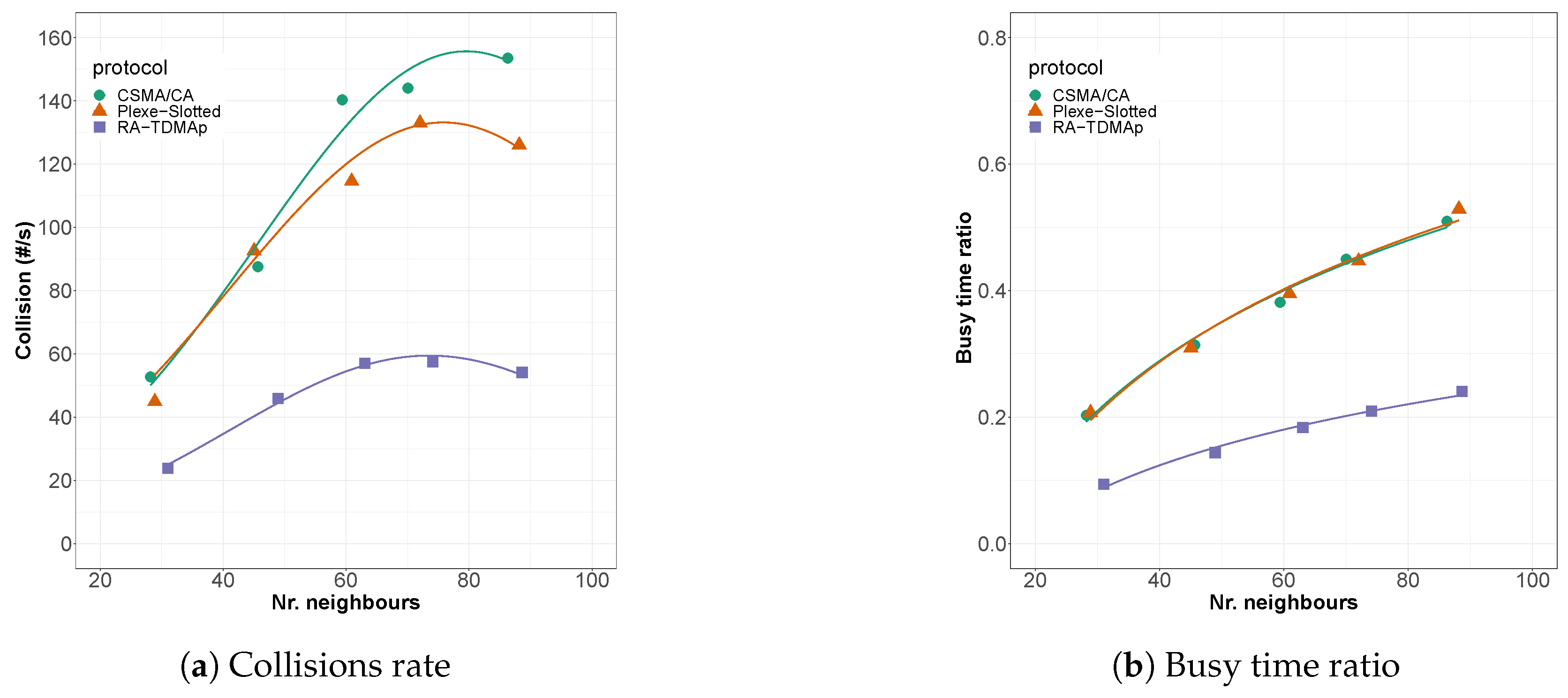
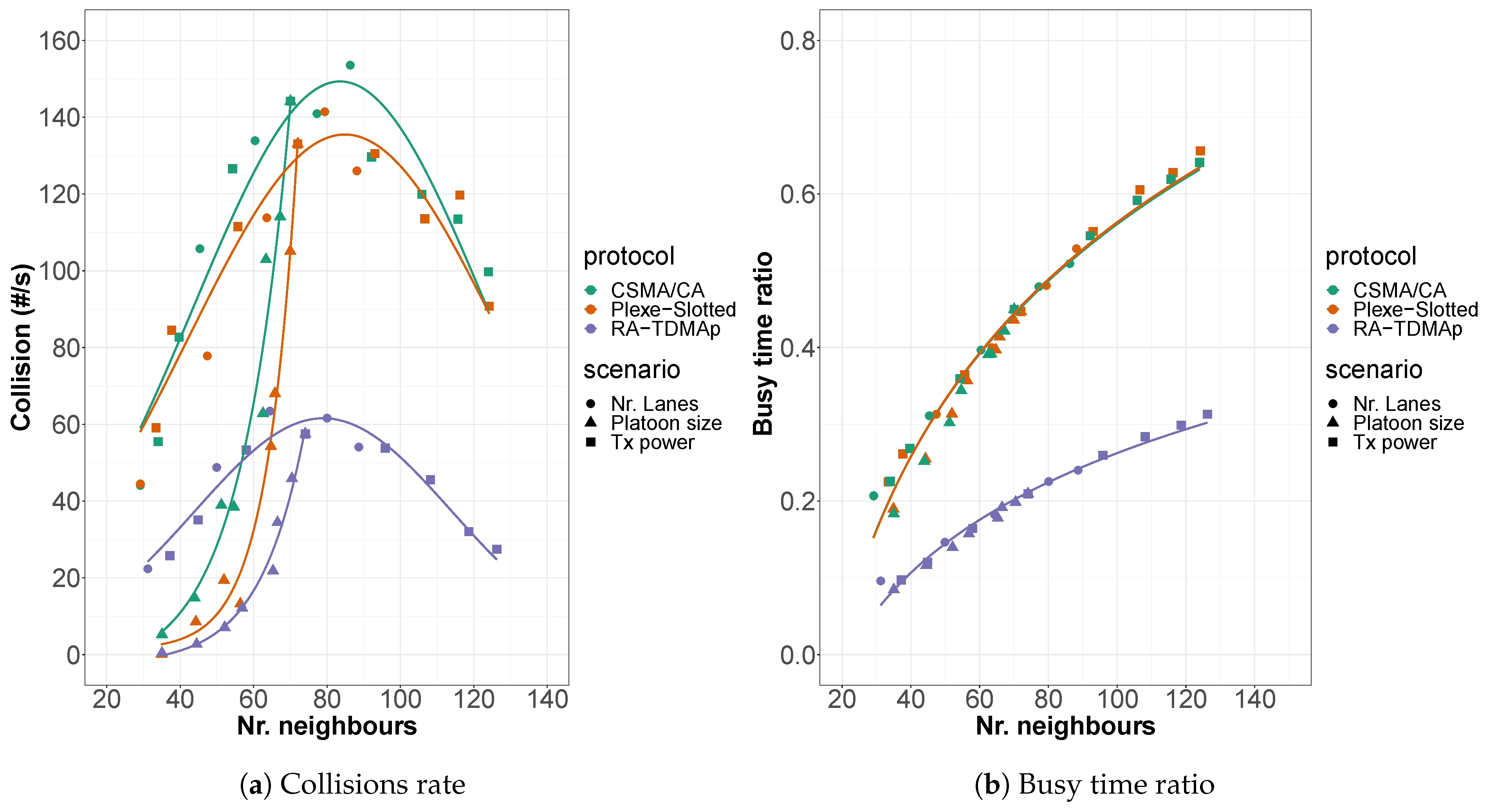
4.3. Number of Lanes and Transmit Power of Followers
4.4. Discussion
- Homogeneous platoon sizes can lead to degradation: Situations of similar slot duration and small phase differences between rounds of disparate platoons can lead to a high collision rate and decrease of the known neighbourhood, specifically for protocols without round adaptation.
- Sets of large platoons experience more collisions: Increasing the platoon size in a convoy of platoons increases the number of messages in each round, and thus leads to more collisions and a busy time ratio. No new nodes are discovered if neighbours can be found up to the communication range.
- High power can contribute to collision reduction: Increasing the transmit power of followers increases spatial coverage, thus causing more neighbours to become known and more collisions up to a tipping point, after which we observed a reduction in the rate of collisions due to the inferior occurrences of uncoordinated medium accesses. This effect was also verified with the leader messages when varying the followers transmit power.
- More lanes introduce new neighbours only up to a point: Rearranging the platoons over more parallel lanes brings an immediate increase in the number of neighbours by spatially deploying new platoons side-by-side to existing ones. Our results reveal that this effect wears out as the number of lanes increases.
- Protocol performance: In all the experimented scenarios, RA-TDMAp consistently showed a smoother behaviour and no susceptibility to conditions of high coherence, leading to better fitting, with significantly lower MSE than the other protocols. Between CSMA/CA and PLEXE-slotted, the latter had, generally, lower MSE thus better fittings. The exception is the variation of the transmit power, in which case, the fitting for CSMA/CA was better (Table 3).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schoch, E.; Kargl, F.; Weber, M.; Leinmuller, T. Communication patterns in VANETs. IEEE Commun. Mag. 2008, 46, 119–125. [Google Scholar] [CrossRef]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11 p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Campolo, C.; Vinel, A.; Molinaro, A.; Koucheryavy, Y. Modeling Broadcasting in IEEE 802.11p/WAVE Vehicular Networks. IEEE Commun. Lett. 2011, 15, 199–201. [Google Scholar] [CrossRef]
- Huang, X.; Liu, A.; Liang, X. An Analytical Model of CSMA/CA Performance For Periodic Broadcast Scheme. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018; pp. 475–479. [Google Scholar] [CrossRef]
- IEEE. IEEE 802.11p-2010—IEEE Standard for Information Technology—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Segata, M.; Bloessl, B.; Joerer, S.; Sommer, C.; Gerla, M.; Cigno, R.L.; Dressler, F. Towards inter-vehicle communication strategies for platooning support. In Proceedings of the 2014 7th International Workshop on Communication Technologies for Vehicles (Nets4Cars-Fall), St.-Petersburg, Russia, 6–8 October 2014; pp. 1–6. [Google Scholar]
- Aslam, A.; Almeida, L.; Santos, F. A Flexible TDMA Overlay Protocol for Vehicles Platooning. In Proceedings of the 13th International Workshop Communication Technologies for Vehicles—(Net4Cars 2018), Madrid, Spain, 17–18 May 2018; pp. 169–180. [Google Scholar]
- IEEE. IEEE P802.11p/D3.0, Draft Amendment for Wireless Access in Vehicular Environments (WAVE); IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- ETSI. 302 663 (V1. 2.1)(11-2012): Intelligent Transport Systems (ITS) AccesS Layer Specification for Intelligent Transport Systems Operating in the 5GHz Band; ETSI: Sophia Antipolis, France, 2012; Volume 5. [Google Scholar]
- Omar, H.; Zhuang, W.; Li, L. VeMAC: A TDMA-based MAC protocol for reliable broadcast in VANETs. IEEE Trans. Mob. Comput. 2013, 12, 1724–1736. [Google Scholar] [CrossRef]
- Lu, N.; Ji, Y.; Liu, F.; Wang, X. A dedicated multi-channel MAC protocol design for VANET with adaptive broadcasting. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Yu, F.; Biswas, S. A self-organizing MAC protocol for DSRC based vehicular ad hoc networks. In Proceedings of the 27th International Conference on Distributed Computing Systems Workshops, Toronto, ON, Canada, 22–29 June 2007; p. 88. [Google Scholar]
- Alonso, A.; Sjöberg, K.; Uhlemann, E.; Ström, E.; Mecklenbräuker, C. Challenging Vehicular Scenarios for Self-Organizing Time Division Multiple Access; European Cooperation in the Field of Scientific and Technical Research: Brussels, Belgium, 2011. [Google Scholar]
- Ding, R.; Zeng, Q.A. A clustering-based multi-channel vehicle-to-vehicle (V2V) communication system. In Proceedings of the First International Conference on Ubiquitous and Future Networks, Hong Kong, China, 7–9 June 2009; pp. 83–88. [Google Scholar]
- Zhang, X.; Su, H.; Chen, H.H. Cluster-based multi-channel communications protocols in vehicle ad hoc networks. IEEE Wirel. Commun. 2006, 13, 44–51. [Google Scholar] [CrossRef]
- Sheu, T.L.; Lin, Y.H. A Cluster-based TDMA System for Inter-Vehicle Communications. J. Inf. Sci. Eng. 2014, 30, 213–231. [Google Scholar]
- Hadded, M.; Laouiti, A.; Zagrouba, R.; Muhlethaler, P.; Saidane, L.A. A Fully Distributed TDMA based MAC Protocol for Vehicular Ad Hoc Networks. In Proceedings of the International Conference on Performance Evalutaion and Modeling in Wired and Wireless Networks PEMWN’2015, Hammamet, Tunisia, 4–6 November 2015. [Google Scholar]
- Gao, J.; Li, M.; Zhao, L.; Shen, X. Contention Intensity Based Distributed Coordination for V2V Safety Message Broadcast. IEEE Trans. Veh. Technol. 2018, 67, 12288–12301. [Google Scholar] [CrossRef]
- Aslam, A.; Almeida, L.; Santos, F. Impact of Platoon Size on the Performance of TDMA-Based MAC Protocols. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–2. [Google Scholar]
- Sommer, C.; Joerer, S.; Segata, M.; Tonguz, O.K.; Cigno, R.L.; Dressler, F. How shadowing hurts vehicular communications and how dynamic beaconing can help. IEEE Trans. Mob. Comput. 2015, 14, 1411–1421. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Segata, M.; Dressler, F.; Cigno, R.L. Jerk beaconing: A dynamic approach to platooning. In Proceedings of the 2015 IEEE Vehicular Networking Conference (VNC), Kyoto, Japan, 16–18 December 2015; pp. 135–142. [Google Scholar]
- Almeida, L.; Santos, F.; Oliveira, L. Management of Cyber Physical Objects in the Future Internet of Things: Methods, Architectures and Applications; Series on Internet of Things; Chapter Structuring Communications for Mobile CyberPhysical Systems; Springer: Berlin/Heidelberg, Germany, 2016; Volume 1. [Google Scholar]
- Segata, M.; Joerer, S.; Bloessl, B.; Sommer, C.; Dressler, F.; Lo Cigno, R. PLEXE: A Platooning Extension for Veins. In Proceedings of the 6th IEEE Vehicular Networking Conference (VNC 2014), Paderborn, Germany, 3–5 December 2014; pp. 53–60. [Google Scholar] [CrossRef]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef]
- Ploeg, J.; Scheepers, B.T.; Van Nunen, E.; Van de Wouw, N.; Nijmeijer, H. Design and experimental evaluation of cooperative adaptive cruise control. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 260–265. [Google Scholar]
- Eckhoff, D.; Sommer, C. A Multi-Channel IEEE 1609.4 and 802.11p EDCA Model for the Veins Framework. In Proceedings of the 5th ACM/ICST International Conference on Simulation Tools and Techniques for Communications, Networks and Systems (SIMUTools 2012): 5th ACM/ICST International Workshop on OMNeT++ (OMNeT++ 2012), Desenzano, Italy, 19–23 March 2012; Poster Session. ACM: Desenzano, Italy, 2012. [Google Scholar]
- Jiang, D.; Chen, Q.; Delgrossi, L. Optimal data rate selection for vehicle safety communications. In Proceedings of the Fifth ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 30–38. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| (Avg.) Platoon size | 2 to 10 cars/platoon |
| Number of platoons | 16 |
| Number of lanes | 1,2,3,4, 5 |
| Inter-vehicle gap | 5 m |
| Inter-platoon gap | ≃28 m |
| Controller | CACC |
| Car length | 4 m |
| Speed | 100 km/h |
| Parameter | Values |
|---|---|
| PHY/MAC model | IEEE 802.11p/1609.4 only (CCH) |
| Path loss model | Free space ( = 2.0) |
| Channel | 5.89 GHz |
| Bitrate | 6 Mbit/s |
| MSDU size | 200 B |
| Access category | |
| Leader’s Tx power | 20 dBm |
| Follower’s Tx power | [−10, −6.9, −3, 0, 3, 4.7, 6, 7] dBm |
| Parameter | Protocol | Collisions Metric | Busy Time Ratio Metric | |||||
|---|---|---|---|---|---|---|---|---|
| Heterogeneous Platoon size | Exponential Model | Log Linear Model | ||||||
| MSE | MSE | |||||||
| RA-TDMAp | 2.106 | |||||||
| PLEXE-slotted | ||||||||
| CSMA/CA | ||||||||
| Lanes | Gaussian Function Model | Log Linear Model | ||||||
| MSE | MSE | |||||||
| RA-TDMAp | 4.806 | |||||||
| PLEXE-slotted | ||||||||
| CSMA/CA | ||||||||
| Tx Power | Gaussian Function Model | Log Linear Model | ||||||
| MSE | MSE | |||||||
| RA-TDMAp | ||||||||
| PLEXE-slotted | ||||||||
| CSMA/CA | ||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslam, A.; Santos, P.M.; Santos, F.; Almeida, L. Empirical Performance Models of MAC Protocols for Cooperative Platooning Applications. Electronics 2019, 8, 1334. https://doi.org/10.3390/electronics8111334
Aslam A, Santos PM, Santos F, Almeida L. Empirical Performance Models of MAC Protocols for Cooperative Platooning Applications. Electronics. 2019; 8(11):1334. https://doi.org/10.3390/electronics8111334
Chicago/Turabian StyleAslam, Aqsa, Pedro M. Santos, Frederico Santos, and Luís Almeida. 2019. "Empirical Performance Models of MAC Protocols for Cooperative Platooning Applications" Electronics 8, no. 11: 1334. https://doi.org/10.3390/electronics8111334
APA StyleAslam, A., Santos, P. M., Santos, F., & Almeida, L. (2019). Empirical Performance Models of MAC Protocols for Cooperative Platooning Applications. Electronics, 8(11), 1334. https://doi.org/10.3390/electronics8111334