Overview: Types of Lower Limb Exoskeletons


 ,
,
Abstract
1. Introduction
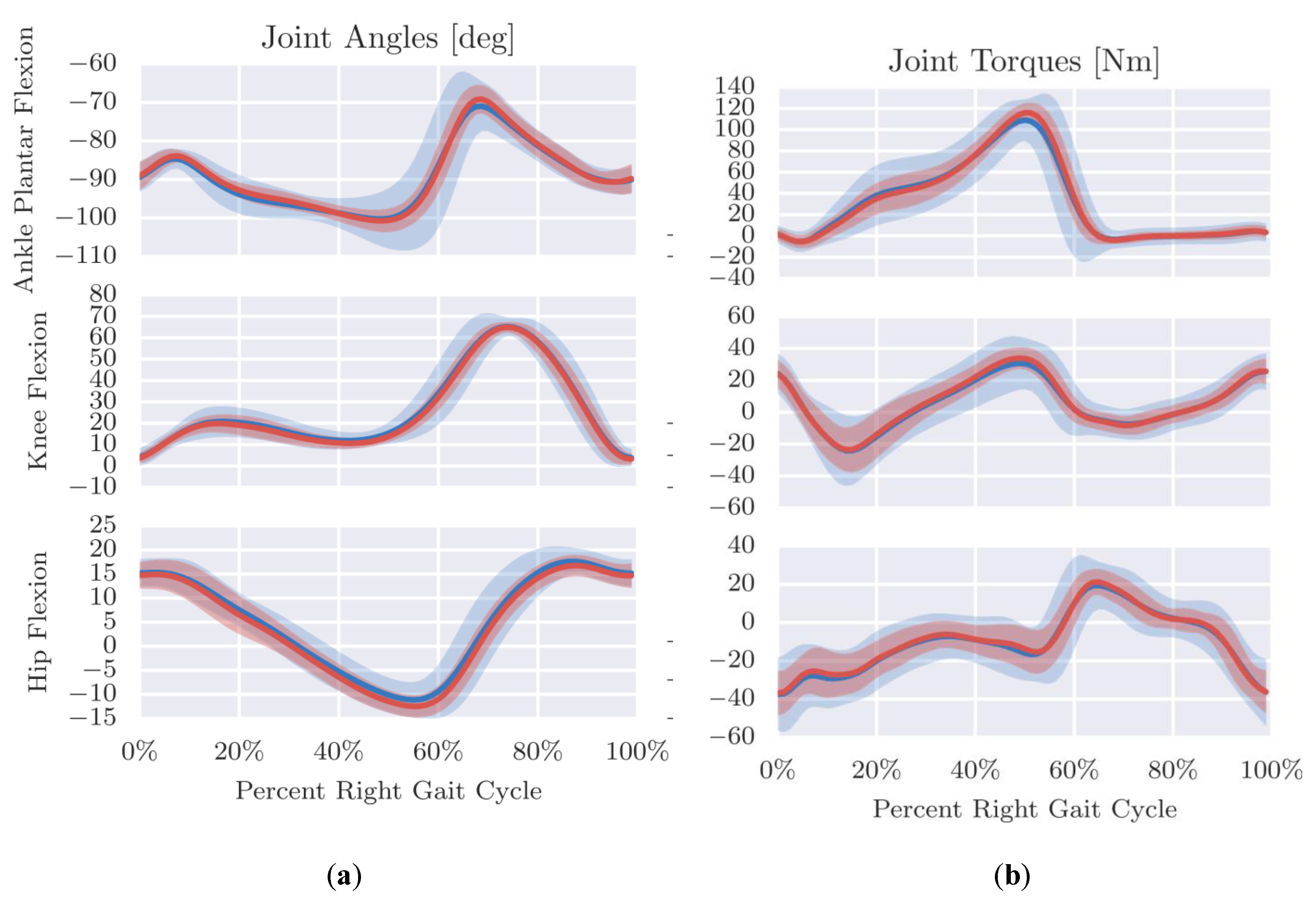
2. The Walking Process
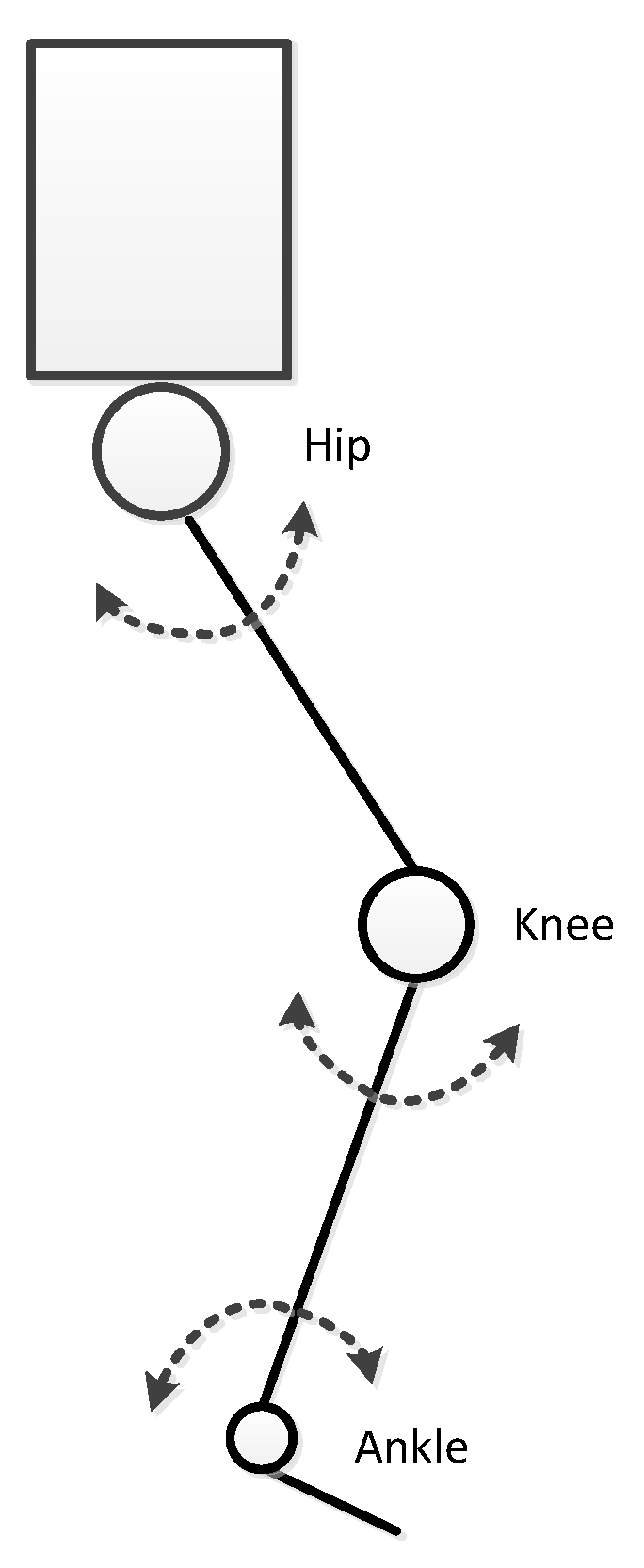
3. Joints of the Exoskeleton
3.1. Hip Exoskeleton
3.2. Knee Exoskeleton
3.3. Ankle Exoskeleton
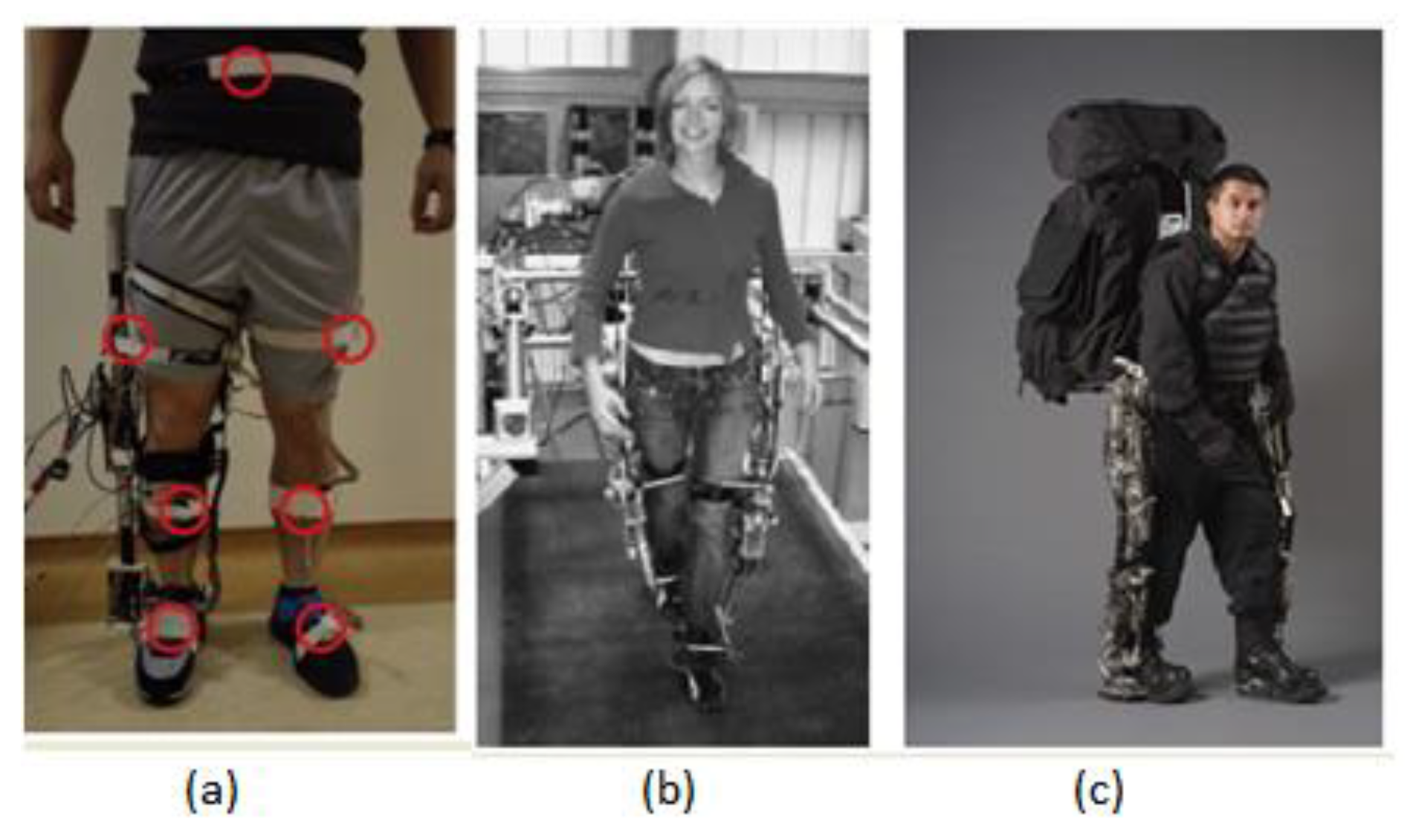
3.4. Multiple Joints Exoskeleton
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dollar, A.M.; Herr, H. Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art. IEEE Trans. Robot. 2008, 24, 144–158. [Google Scholar] [CrossRef]
- Malcolm, P.; Derave, W.; Galle, S.; de Clercq, D. A Simple Exoskeleton That Assists Plantarflexion Can Reduce the Metabolic Cost of Human Walking. PLoS ONE 2013, 8, e56137. [Google Scholar] [CrossRef] [PubMed]
- Kazerooni, H.; Steger, R.; Huang, L. Hybrid control of the Berkeley Lower Extremity Exoskeleton (BLEEX). Int. J. Robot. Res. 2006, 25, 561–573. [Google Scholar] [CrossRef]
- Banchadit, W.; Temram, A.; Sukwan, T.; Owatchaiyapong, P.; Suthakorn, J. Design and implementation of a new motorized-mechanical exoskeleton based on CGA Patternized Control. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics, ROBIO 2012—Conference Digest, Guangzhou, China, 11–14 December 2012; pp. 1668–1673. [Google Scholar]
- Coenen, P.; van Werven, G.; van Nunen, M.P.M.; van Dieën, J.H.; Gerrits, K.H.L.; Janssen, T.W.J. Robot-assisted walking vs overground walking in stroke patients: an evaluation of muscle activity. J. Rehabil. Med. 2012, 44, 331–337. [Google Scholar] [CrossRef] [PubMed]
- Guizzo, E.; Goldstein, H. The rise of the body bots. IEEE Spectr. 2005, 42, 50–56. [Google Scholar] [CrossRef]
- Hessinger, M.; Pingsmann, M.; Perry, J.C.; Werthschutzky, R.; Kupnik, M. Hybrid position/force control of an upper-limb exoskeleton for assisted drilling. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, AB, Canada, 24–28 September 2017; Volume 2017, pp. 1824–1829. [Google Scholar]
- Christensen, S.; Bai, S.; Rafique, S.; Isaksson, M.; O’Sullivan, L.; Power, V.; Virk, G.S. AXO-SUIT—A modular full-body exoskeleton for physical assistance. In Mechanisms and Machine Science; Springer: Dordrecht, The Netherlands, 2019; Volume 66, pp. 443–450. [Google Scholar]
- Shorter, K.A.; Kogler, G.F.; Loth, E.; Durfee, W.K.; Hsiao-Wecksler, E.T. A portable powered ankle-foot orthosis for rehabilitation. J. Rehabil. Res. Dev. 2011, 48, 459–472. [Google Scholar] [CrossRef]
- Ranaweera, R.K.P.S.; Gopura, R.A.R.C.; Jayawardena, T.S.S.; Mann, G.K.I. Development of A Passively Powered Knee Exoskeleton for Squat Lifting. J. Robot. Netw. Artif. Life 2018, 5, 45. [Google Scholar] [CrossRef]
- Gait | Joint Structure and Function: A Comprehensive Analysis, 5e | F.A. Davis PT Collection | McGraw-Hill Medical. Available online: https://fadavispt.mhmedical.com/content.aspx?bookid=1862§ionid=136086727 (accessed on 16 September 2019).
- Moore, J.K.; Hnat, S.K.; van den Bogert, A.J. An elaborate data set on human gait and the effect of mechanical perturbations. Peer J. 2015, 3, e918. [Google Scholar] [CrossRef]
- Voloshina, A.S.; Ferris, D.P. Biomechanics and energetics of running on uneven terrain. J. Exp. Biol. 2015, 218, 711–719. [Google Scholar] [CrossRef]
- Lenzi, T.; Carrozza, M.C.; Agrawal, S.K. Powered hip exoskeletons can reduce the user’s hip and ankle muscle activations during walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 938–948. [Google Scholar] [CrossRef]
- Walking Assist Device with Stride Management System | Research paper site of Honda R&D Co., Ltd. Available online: https://www.hondarandd.jp/point.php?pid=122&lang=en (accessed on 5 September 2019).
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Vitiello, N. A light-weight active orthosis for hip movement assistance. Robot. Auton. Syst. 2015, 73, 123–134. [Google Scholar] [CrossRef]
- Baud, R.; Ortlieb, A.; Olivier, J.; Bouri, M.; Bleuler, H. HIBSO hip exoskeleton: Toward a wearable and autonomous design. Mech. Mach. Sci. 2018, 48, 185–195. [Google Scholar]
- Wu, Q.; Wang, X.; Du, F.; Zhang, X. Design and control of a powered hip exoskeleton for walking assistance. Int. J. Adv. Robot. Syst. 2015, 12, 18. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft exosuit for hip assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Grimmer, M.; Eslamy, M.; Seyfarth, A. Energetic and peak power advantages of series elastic actuators in an actuated prosthetic leg for walking and running. Actuators 2014, 3, 1–19. [Google Scholar] [CrossRef]
- Hirata, R.; Duarte, M. Effect of relative knee position on internal mechanical loading while squatting. Brazilian J. Phys. Ther. 2007, 11, 107–111. [Google Scholar]
- Slater, L.V.; Hart, J.M. The influence of knee alignment on lower extremity kinetics during squats. J. Electromyogr. Kinesiol. 2016, 31, 96–103. [Google Scholar] [CrossRef]
- Sridar, S.; Nguyen, P.H.; Zhu, M.; Lam, Q.P.; Polygerinos, P. Development of a soft-inflatable exosuit for knee rehabilitation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, AB, Canada, 24–28 September 2017; pp. 3722–3727. [Google Scholar]
- Witte, K.A.; Fatschel, A.M.; Collins, S.H. Design of a lightweight, tethered, torque-controlled knee exoskeleton. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 1646–1653. [Google Scholar]
- Yu, S.; Huang, T.H.; Wang, D.; Lynn, B.; Sayd, D.; Silivanov, V.; Su, H. Design and Control of a Quasi-Direct Drive Soft Hybrid Knee Exoskeleton for Injury Prevention during Squatting. arXiv 2019, arXiv:1902.07106. [Google Scholar]
- Wang, J.; Li, X.; Huang, T.H.; Yu, S.; Li, Y.; Chen, T.; Su, H. Comfort-Centered Design of a Lightweight and Backdrivable Knee Exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 4265–4272. [Google Scholar] [CrossRef]
- Mooney, L.M.; Herr, H.M. Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton. J. Neuroeng. Rehabil. 2016, 13, 4. [Google Scholar] [CrossRef]
- Asbeck, A.T.; de Rossi, S.M.M.; Holt, K.G.; Walsh, C. A Biologically Inspired Soft Exosuit for Walking Assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Bai, Y.; Gao, X.; Zhao, J.; Jin, F.; Dai, F.; Lv, Y. A portable ankle-foot rehabilitation orthosis powered by electric motor. Open Mech. Eng. J. 2015, 9, 982–991. [Google Scholar] [CrossRef]
- Carberry, J.; Hinchly, G.; Buckerfield, J.; Tayler, E.; Burton, T.; Madgwick, S.; Vaidyanathan, R. Parametric design of an active ankle foot orthosis with passive compliance. In Proceedings of the IEEE Symposium on Computer-Based Medical Systems, Bristol, UK, 27–30 June 2011. [Google Scholar]
- Agrawal, A.; Banala, S.K.; Agrawal, S.K.; Binder-Macleod, S.A. Design of a two degree-of-freedom ankle-foot orthosis for robotic rehabilitation. In Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005; Volume 2005, pp. 41–44. [Google Scholar]
- Park, Y.L.; Chen, B.R.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.; Nagpal, R. Bio-inspired active soft orthotic device for ankle foot pathologies. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, Francisco, CA, USA, 25–30 September 2011; pp. 4488–4495. [Google Scholar]
- Chen, G.; Qi, P.; Guo, Z.; Yu, H. Mechanical design and evaluation of a compact portable knee-ankle-foot robot for gait rehabilitation. Mech. Mach. Theory 2016, 103, 51–64. [Google Scholar] [CrossRef]
- Rossi, S.; Patane, F.; del Sette, F.; Cappa, P. WAKE-up: A wearable ankle knee exoskeleton. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, São Paulo, Brazil, 12–15 August 2014; pp. 504–507. [Google Scholar]
- Veneman, J.F.; Kruidhof, R.; Hekman, E.E.G.; Ekkelenkamp, R.; van Asseldonk, E.H.F.; van der Kooij, H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef]
- Costa, N.; Caldwell, D.G. Control of a biomimetic ‘soft-actuated’ 10DoF lower body exoskeleton. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; Volume 2006, pp. 495–501. [Google Scholar]
- Wang, D.; Lee, K.M.; Guo, J.; Yang, C.J. Adaptive knee joint exoskeleton based on biological geometries. IEEE/ASME Trans. Mechatron. 2014, 19, 1268–1278. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Joints | DoF | Movement |
|---|---|---|---|
| 1 | Hips | 3 | Flexion–extension |
| Abduction–adduction | |||
| Internal–external rotation | |||
| 2 | Knees | 2 | Flexion–extension |
| rotation | |||
| 3 | Ankles | 3 | plantar flexion–dorsiflexion |
| Abduction–adduction | |||
| Eversion–inversion |
| No | Right Leg | Left Leg |
|---|---|---|
| 1 | Heel strike | Pre swing |
| 2 | Loading response | Toe off |
| 3 | Mid Stance | Mid Swing |
| 4 | Terminal Stance | Terminal Swing |
| 5 | Pre swing | Heel strike |
| 6 | Toe off | Loading response |
| 7 | Mid Swing | Mid Stance |
| 8 | Terminal Swing | Terminal Stance |
| No | Name/Institution | Joint | DoF | Actuator | Type of Actuator | Weight (kg) |
|---|---|---|---|---|---|---|
| 1 | Honda Walking Assist [15] | Hip | 1 | Active flexion–extension | DC motor | 2.7 |
| 2 | Exoskeleton/The BioRobotics Institute, Scuola Superiore Sant’Anna [16] | Hip | 2 | Active flexion–extension Passive abduction–adduction | DC motor (SEA) carbon fiber linkage | 8.5 |
| 3 | HIPSO [17] | Hip | 2 | Active flexion–extension Passive abduction–adduction | DC Motor ball-bearing | 9.5 |
| 4 | PH-EXOS [18] | Hip | 3 | Active flexion–extension Passive abduction–adduction and internal–external rotation | AC motor mechanical structure | n/a |
| 5 | Hip exosuit/Harvard University [19] | Hip | 1 | Active flexion–extension | DC motor | n/a |
| 6 | Soft inflatable exosuit [23] | Knee | 1 | Active flexion–extension | Pneumatics | 0.16 |
| 7 | Knee Exo/Carnegie Mellon University [24] | Knee | 1 | Active flexion–extension | DC motor | 0.76 |
| 8 | University of Moratuwa, Katubedd [10] | Knee | 1 | Passive flexion–extension | Spring | n/a |
| 9 | Soft hybrid EXO/The City University of New York [25] | Knee | 1 | Active flexion–extension | DC motor | n/a |
| 10 | The City University of New York [26] | Knee | 1 | Active flexion–extension | DC motor | 3.2 |
| 11 | MIT ankle exoskeleton [27] | Ankle | 1 | Active flexion–dorsiflexion | DC motor | 4 |
| 12 | Knee soft exosuit/Harvard University [28] | Ankle | 1 | Active flexion–dorsiflexion | DC motor | 12.15 |
| 13 | Beijing Institute of Technology [29] | Ankle | 1 | Active flexion–dorsiflexion | DC motor | n/a |
| 14 | University of Illinois [9] | Ankle | 1 | Active flexion–dorsiflexion | Pneumatics | n/a |
| 15 | University of Bristol [30] | Ankle | 2 | Active flexion–dorsiflexion | Pneumatics | n/a |
| Active Inversion–eversion | Pneumatics | |||||
| 16 | University of Delaware [31] | Ankle | 2 | Active flexion–dorsiflexion | DC motor | n/a |
| Passive Inversion–eversion | Spring and damper | |||||
| 17 | Harvard University [32] | Ankle | 2 | Active flexion–dorsiflexion | Pneumatics | 0.95 |
| Active Inversion–eversion | Pneumatics | |||||
| 18 | National University of Singapore [33] | Knee– ankle | 2 | Active knee flexion–extension | DC motor | n/a |
| Active ankle flexion–dorsiflexion | DC motor | |||||
| 19 | WAKE-up [34] | Knee– ankle | 2 | Active knee flexion–extension | DC motor | 2.5 |
| Active ankle flexion–dorsiflexion | DC motor | |||||
| 20 | LOPES [35] | Hip– ankle | 3 | Active Hip Flexion–extension | DC motor | n/a |
| Active hip abduction–adduction | DC motor | |||||
| Active knee flexion–extension | DC motor | |||||
| 21 | BLEEX [3] | Hip– Knee– ankle | 5 | Active hip Flexion–extension | Hydraulic | 14 |
| Active hip Abduction–adduction | Hydraulic | |||||
| Passive hip rotation | Spring | |||||
| Active knee Flexion–extension | Hydraulic | |||||
| Active ankle flexion–dorsiflexion | Hydraulic | |||||
| 22 | University of Salford [36] | Hip– Knee– ankle | 5 | Active hip Flexion–extension | Pneumatic | 12 |
| Active hip Abduction–adduction | Pneumatic | |||||
| Passive hip rotation | Pneumatic | |||||
| Active knee Flexion–extension | Pneumatic | |||||
| Active ankle flexion–dorsiflexion | Pneumatic |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pamungkas, D.S.; Caesarendra, W.; Soebakti, H.; Analia, R.; Susanto, S. Overview: Types of Lower Limb Exoskeletons. Electronics 2019, 8, 1283. https://doi.org/10.3390/electronics8111283
Pamungkas DS, Caesarendra W, Soebakti H, Analia R, Susanto S. Overview: Types of Lower Limb Exoskeletons. Electronics. 2019; 8(11):1283. https://doi.org/10.3390/electronics8111283
Chicago/Turabian StylePamungkas, Daniel S, Wahyu Caesarendra, Hendawan Soebakti, Riska Analia, and Susanto Susanto. 2019. "Overview: Types of Lower Limb Exoskeletons" Electronics 8, no. 11: 1283. https://doi.org/10.3390/electronics8111283
APA StylePamungkas, D. S., Caesarendra, W., Soebakti, H., Analia, R., & Susanto, S. (2019). Overview: Types of Lower Limb Exoskeletons. Electronics, 8(11), 1283. https://doi.org/10.3390/electronics8111283