Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends




Abstract
:1. Introduction
2. Classic Control for Onshore and Fixed Offshore Turbine
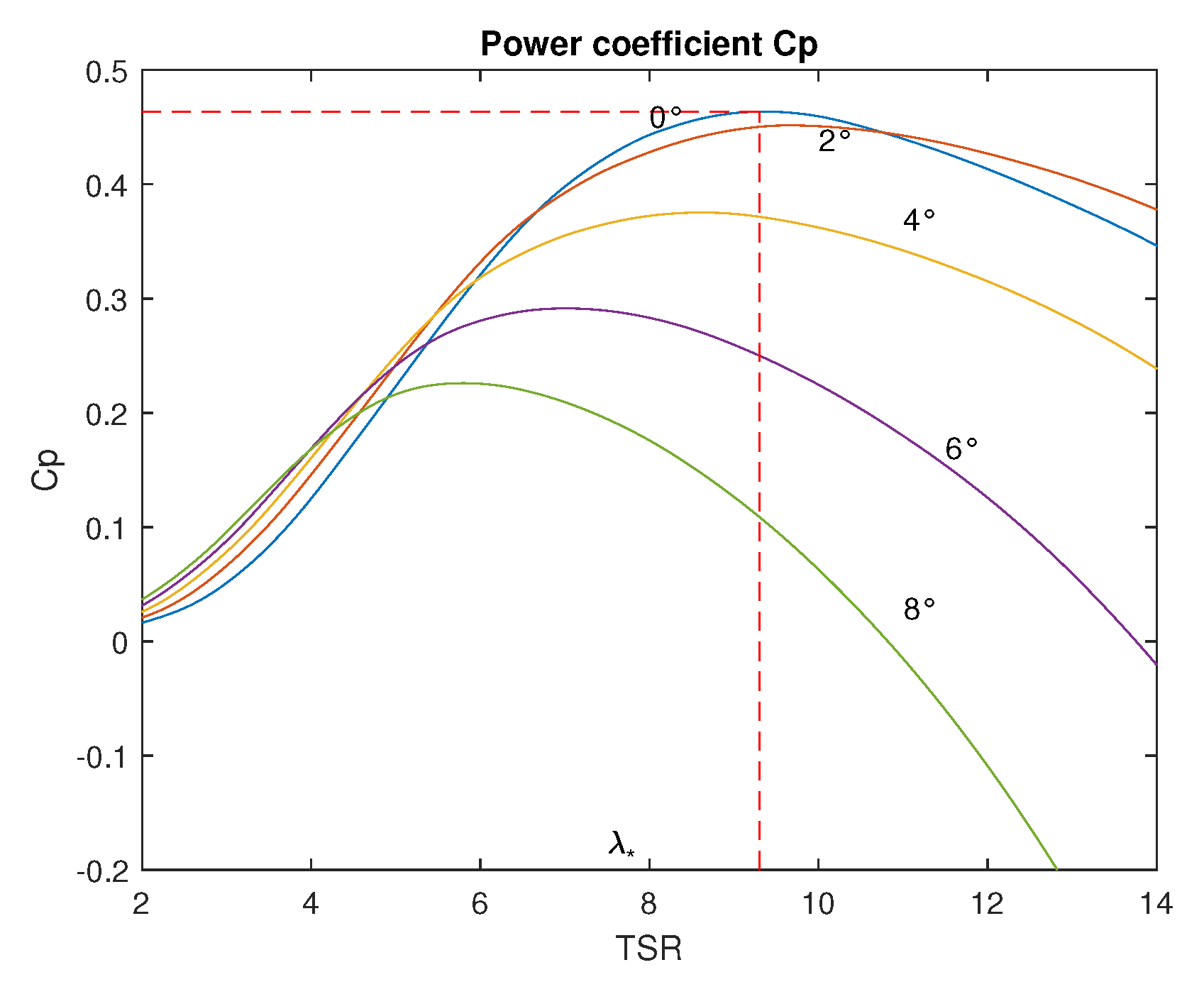
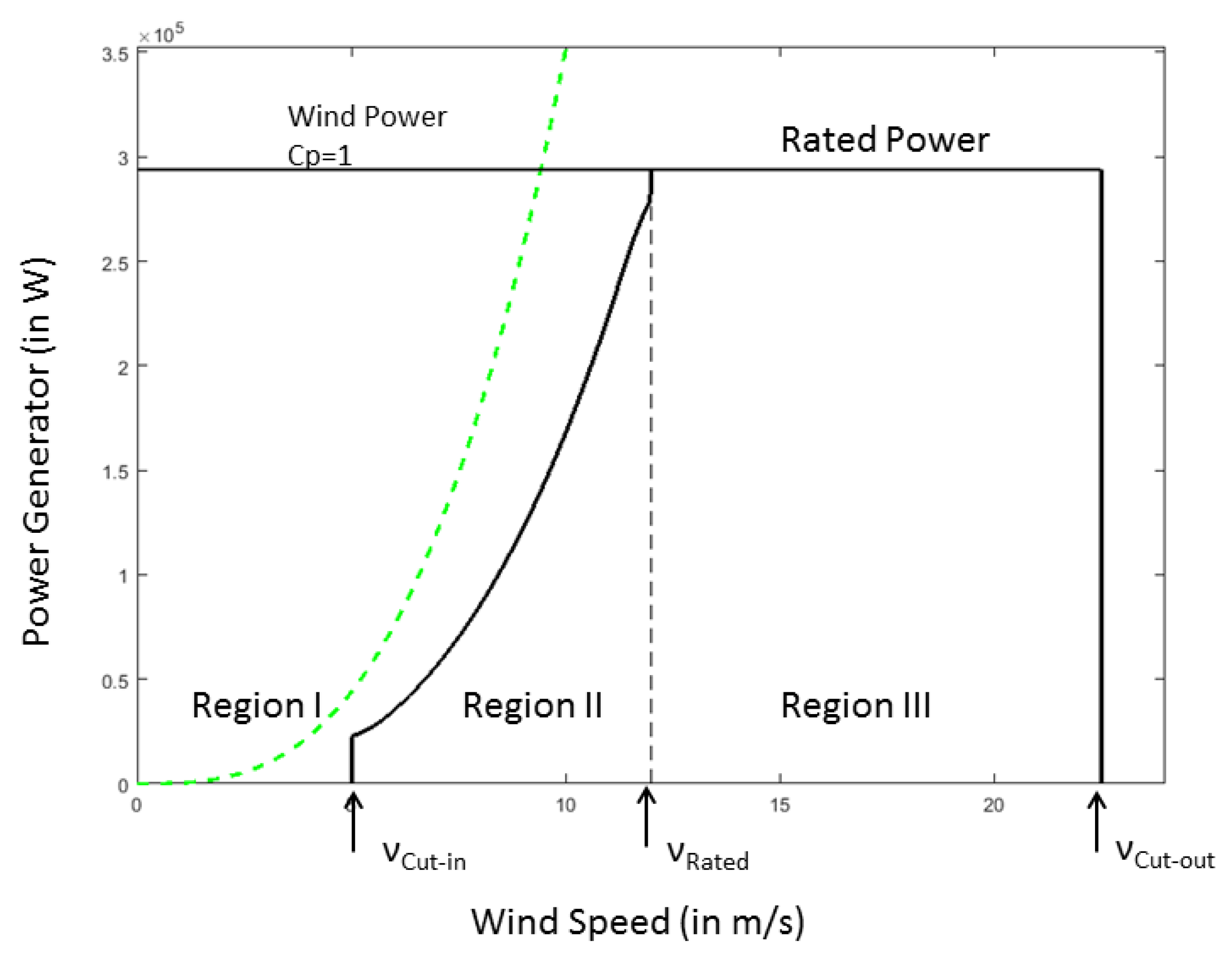
2.1. Wind Turbine Fundamentals
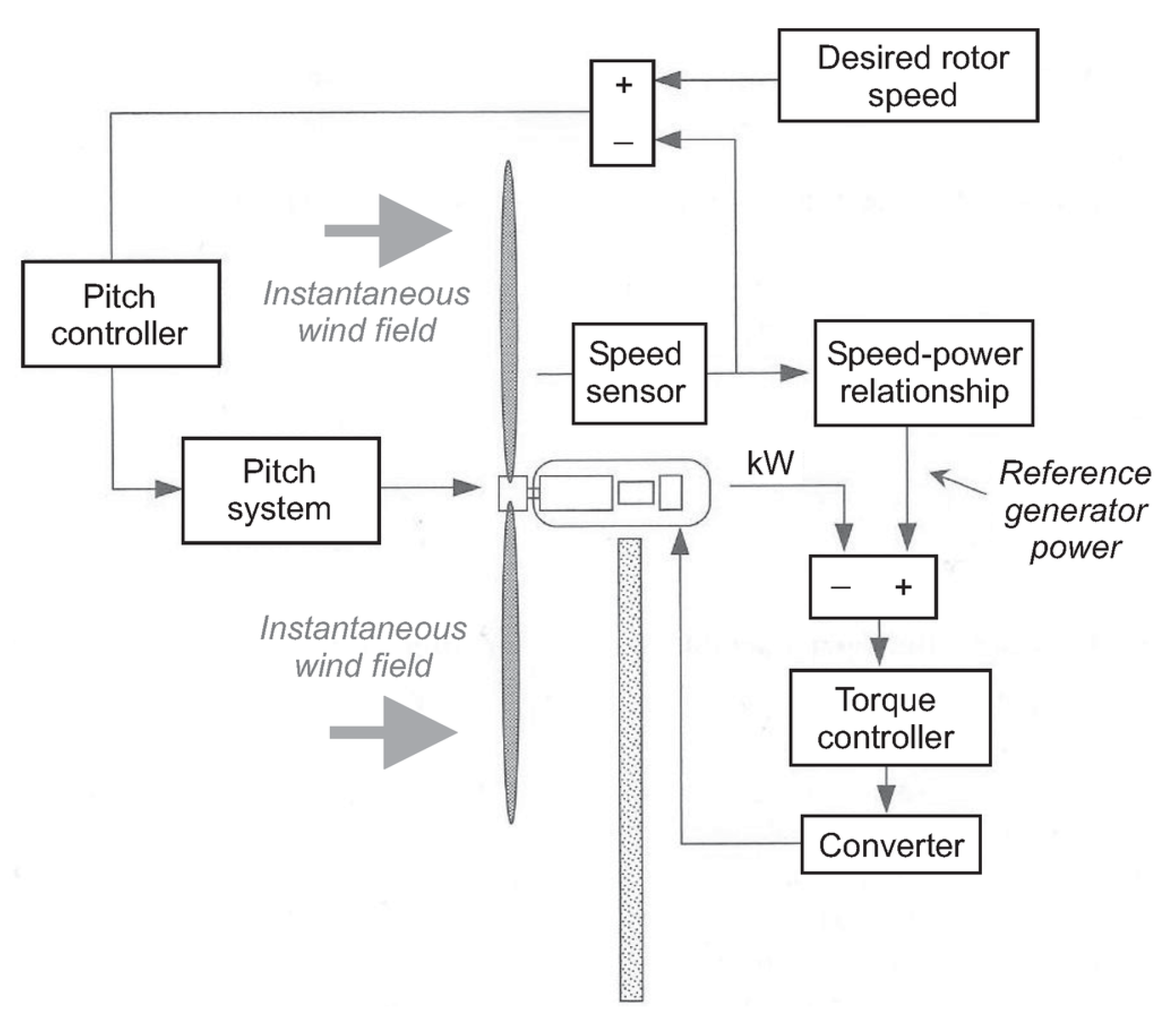
2.2. Standard Method Control
2.3. Generator Torque Control
2.4. Power Optimization Control
2.5. Collective Pitch Control
3. Limitations and Problems for FOWT
3.1. Aerodynamics
3.2. Hydrodynamics
4. Strategies Suitable for Problems Specific to FOWT
4.1. Individual Pitch Blade
4.2. Structure Control
5. Adapted Strategies for FOWT
6. Evaluation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FOWT | Floating Offshore Wind Turbine |
| MIMO | Multiple Input Multiple Output |
| O&G | Oils and Gas |
| DOF | Degrees Of Freedom |
| TMD | Tuned Mass Damper |
| PID | Proportional Integral Derivative |
| TSR | Tip-Speed Ratio |
| SISO | Single Input and Single Output |
| TLCD | Tuned Liquid Column Damper |
| MPC | Model Predictive Control |
| LQG | Linear Quadratic Gaussian |
| NN | Neural Network |
| FL | Fuzzy Logic |
| P & O | Perturb and Observe |
| MPPT | Maximum Point Peak Tracking |
| LIDAR | Light Detection and Danging |
| Nomenclature | |
| R | rotor radius, m |
| v | wind speed, m · s |
| air density, kg · m | |
| pitch angle of the blades, degrees | |
| rotor speed, rad · s | |
| J | turbine inertia, kg · m |
| torque, N · m | |
| Cp( | power coefficient |
| Tip Speed Ratio |
References
- Ohlenforst, K.; Sawyer, S.; Dutton, A.; Backwel, B.; Fiestas, R.; Lee, J.; Qiao, L.; Zhao, F.; Balachandran, N. GWEC GLOBAL WIND REPORT 2018; GWEC: Brussels, Belgium, 2018. [Google Scholar]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2007. [Google Scholar]
- Cruciani, M. The expansion of offshore wind power in the North Sea: A strategic opportunity for the European Union. Econ. Policy Energy Environ. 2018. [Google Scholar] [CrossRef]
- Freeman, K.; Hundleby, G.; Nordstrom, C.; Roberts, A.; Valpy, B.; Willow, C.; Torato, P.; Ayuso, M.; Boshell, F. Floating Foundations: A Game Changer for Offshore Wind Power. Available online: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2016/IRENA_Offshore_Wind_Floating_Foundations_2016.pdf (accessed on 23 September 2019).
- Bulder, B.; Van Hees, M.T.; Henderson, A.; Huijsmans, R.; Pierik, J.; Snijders, E.; Wijnants, G.; Wolf, M. Study to feasibility of and boundary conditions for floating offshore wind turbines. ECN, MARIN, TNO, TUD, MSC, Lagerway the Windmaster 2002, 26, 70–81. [Google Scholar]
- International Electrotechnical Commission; Technical Committee 88. Wind Turbines. Eoliennes. Part 3, Partie 3, Part 3, Partie 3; International Electrotechnical Commission: Geneva, Switzerland, 2009; OCLC: 316432209. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G. Importance of control strategies on fatigue life of floating wind turbines. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering. American Society of Mechanical Engineers Digital Collection, San Diego, CA, USA, 10–15 June 2007; pp. 493–500. [Google Scholar]
- Pandit, R.K.; Infield, D.; Carroll, J. Incorporating air density into a Gaussian process wind turbine power curve model for improving fitting accuracy. Wind Energy 2019, 22, 302–315. [Google Scholar] [CrossRef]
- Poore, R. NWTC AWT-26 Research and Retrofit Project-Summary of AWT-26/27 Turbine Research and Development; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 2000. [Google Scholar]
- Johnson, K.E.; Pao, L.Y.; Balas, M.J.; Fingersh, L.J. Control of variable-speed wind turbines: Standard and adaptive techniques for maximizing energy capture. IEEE Control Syst. Mag. 2006, 26, 70–81. [Google Scholar]
- Simani, S. Overview of modelling and advanced control strategies for wind turbine systems. Energies 2015, 8, 13395–13418. [Google Scholar] [CrossRef]
- Johnson, K.E. Adaptive Torque Control of Variable Speed Wind Turbines; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 2004. [Google Scholar]
- Abdullah, M.A.; Yatim, A.; Tan, C.W.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Barakati, S.M.; Kazerani, M.; Aplevich, J.D. Maximum power tracking control for a wind turbine system including a matrix converter. IEEE Trans. Energy Convers. 2009, 24, 705–713. [Google Scholar] [CrossRef]
- Pan, T.; Ji, Z.; Jiang, Z. Maximum power point tracking of wind energy conversion systems based on sliding mode extremum seeking control. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; pp. 1–5. [Google Scholar]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M.E.H. Sliding mode power control of variable-speed wind energy conversion systems. IEEE Trans. Energy Convers. 2008, 23, 551–558. [Google Scholar] [CrossRef]
- Wang, L.; Zuo, S.; Song, Y.; Zhou, Z. Variable torque control of offshore wind turbine on spar floating platform using advanced RBF neural network. Abstr. Appl. Anal. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Petković, D.; Ćojbašič, Ž.; Nikolić, V. Adaptive neuro-fuzzy approach for wind turbine power coefficient estimation. Renew. Sustain. Energy Rev. 2013, 28, 191–195. [Google Scholar] [CrossRef]
- Meharrar, A.; Tioursi, M.; Hatti, M.; Stambouli, A.B. A variable speed wind generator maximum power tracking based on adaptative neuro-fuzzy inference system. Expert Syst. Appl. 2011, 38, 7659–7664. [Google Scholar] [CrossRef]
- Bagherieh, O.; Nagamune, R. Gain-scheduling control of a floating offshore wind turbine above rated wind speed. Control Theory Technol. 2015, 13, 160–172. [Google Scholar] [CrossRef]
- Larsen, T.J.; Hanson, T.D. A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine. J. Phys. Conf. Ser. 2007, 75, 012073. [Google Scholar] [CrossRef]
- Molin, B. Hydrodynamique des Structures Offshore; Editions Technip: Paris, France, 2002. [Google Scholar]
- Kim, H.; Lee, S.; Lee, S. Influence of blade-tower interaction in upwind-type horizontal axis wind turbines on aerodynamics. J. Mech. Sci. Technol. 2011, 25, 1351. [Google Scholar] [CrossRef]
- Han, B.; Zhou, L.; Yang, F.; Xiang, Z. Individual pitch controller based on fuzzy logic control for wind turbine load mitigation. IET Renew. Power Gener. 2016, 10, 687–693. [Google Scholar] [CrossRef]
- Kang, M.J.; Kim, H.C. Neural Network Based Pitch Controller. In Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015), Barcelona, Spain, 13–14 July 2015; pp. 1–6. [Google Scholar]
- Bossanyi, E.A. Individual blade pitch control for load reduction. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Namik, H.; Stol, K. Individual blade pitch control of floating offshore wind turbines. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2010, 13, 74–85. [Google Scholar] [CrossRef]
- Namik, H.; Stol, K. Performance analysis of individual blade pitch control of offshore wind turbines on two floating platforms. Mechatronics 2011, 21, 691–703. [Google Scholar] [CrossRef]
- Lackner, M.A.; Rotea, M.A. Structural control of floating wind turbines. Mechatronics 2011, 21, 704–719. [Google Scholar] [CrossRef]
- Si, Y.; Karimi, H.R.; Gao, H. Modelling and optimization of a passive structural control design for a spar-type floating wind turbine. Eng. Struct. 2014, 69, 168–182. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B.; Nagarajaiah, S. Semi-active control of vibrations of spar type floating offshore wind turbines. Smart Struct. Syst. 2016, 18, 683–705. [Google Scholar] [CrossRef]
- Li, X.; Gao, H. Load Mitigation for a Floating Wind Turbine via Generalized Structural Control. IEEE Trans. Ind. Electron. 2016, 63, 332–342. [Google Scholar] [CrossRef]
- Coudurier, C.; Lepreux, O.; Petit, N. Passive and semi-active control of an offshore floating wind turbine using a tuned liquid column damper. IFAC-PapersOnLine 2015, 48, 241–247. [Google Scholar] [CrossRef]
- Christiansen, S.; Knudsen, T.; Bak, T. Optimal control of a ballast-stabilized floating wind turbine. In Proceedings of the 2011 IEEE International Symposium on Computer-Aided Control System Design (CACSD), Denver, CO, USA, 28–30 September 2011; pp. 1214–1219. [Google Scholar]
- Raach, S.; Schlipf, D.; Sandner, F.; Matha, D.; Cheng, P.W. Nonlinear model predictive control of floating wind turbines with individual pitch control. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4434–4439. [Google Scholar]
- Schlipf, D.; Sandner, F.; Raach, S.; Matha, D.; Cheng, P.W. Nonlinear model predictive control of floating wind turbines. In Proceedings of the Twenty-Third (2013) International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Tahani, M.; Ziaee, E.; Hajinezhad, A.; Servati, P.; Mirhosseini, M.; Sedaghat, A. Vibrational simulation of offshore floating wind turbine and its directional movement control by fuzzy logic. In Proceedings of the 2015 International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Kuwait City, Kuwait, 23–25 November 2015; pp. 1–7. [Google Scholar]
- Wenzhong, Q.; Jincai, S.; Yang, Q. Active control of vibration using a fuzzy control method. J. Sound Vib. 2004, 275, 917–930. [Google Scholar] [CrossRef]
- Qi, Y.; Meng, Q. The application of fuzzy PID control in pitch wind turbine. Energy Procedia 2012, 16, 1635–1641. [Google Scholar] [CrossRef]
- Jeong, H.G.; Seung, R.H.; Lee, K.B. An improved maximum power point tracking method for wind power systems. Energies 2012, 5, 1339–1354. [Google Scholar] [CrossRef]
- Wright, A.D.; Fingersh, L. Advanced Control Design for Wind Turbines; Part I: Control Design, Implementation, and Initial Tests; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2008. [Google Scholar]
- Dahbi, A.; Nait-Said, N.; Nait-Said, M.S. A novel combined MPPT-pitch angle control for wide range variable speed wind turbine based on neural network. Int. J. Hydrog. Energy 2016, 41, 9427–9442. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating | 275 kW |
|---|---|
| Rotor Orientation, Configuration | Downwind, 2 Blades |
| Control | Variable Speed, Collective Pitch |
| Rotor, Hub Height | 28.5 m, 42.6 |
| Cut-in, Rated, Cut-out wind speed | 4.9 m/s, 17 m/s, 22.5 m/s |
| Rated Rotational Speed | 53 rpm |
| Control Method | Variable Controlled | Limits | References |
|---|---|---|---|
| Optimal TSR | Torque | Simple to implement.Wind measurements required | [12] |
| Power signal Feedback | Torque | Requires the reference optimum power curve obtained from experimental results | [13] |
| Perturb and Observe | Torque | Efficiency only for low inertia load wind turbine | [14] |
| Sliding mode | Torque and Pitch | Problem of convergence time with high variation of wind speed | [15,16,40] |
| Adaptive controller | Torque | Require knowledge of and | [10,12] |
| Neural Network∖Fuzzy logic | Torque | Complicate to implement (Unexplained behavior of the network,Hardware dependence) | [13,17] |
| Control Method | Strategies | Description | References |
|---|---|---|---|
| PI (with Gain scheduling) | Collective pitch | Robust and simple to design | [41] |
| Linear Quadratic Gaussian | Individual pitch | Multi-variable control, Kalman filter is used to estimate system states | [26] |
| Fuzzy logic | Individual pitch | Cover a wider range of operating conditions, cheaper to develop | [24] |
| Model predictive control | Individual pitch | Multi-processing input and output data in real time, ability to anticipate | [36] |
| Neural Network | Individual pitch | Learning ability in order to model nonlinear and complex system | [25,42] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salic, T.; Charpentier, J.F.; Benbouzid, M.; Le Boulluec, M. Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends. Electronics 2019, 8, 1185. https://doi.org/10.3390/electronics8101185
Salic T, Charpentier JF, Benbouzid M, Le Boulluec M. Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends. Electronics. 2019; 8(10):1185. https://doi.org/10.3390/electronics8101185
Chicago/Turabian StyleSalic, Tom, Jean Frédéric Charpentier, Mohamed Benbouzid, and Marc Le Boulluec. 2019. "Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends" Electronics 8, no. 10: 1185. https://doi.org/10.3390/electronics8101185
APA StyleSalic, T., Charpentier, J. F., Benbouzid, M., & Le Boulluec, M. (2019). Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends. Electronics, 8(10), 1185. https://doi.org/10.3390/electronics8101185