Wireless Power Transfer for Battery Powering System


Abstract
:1. Introduction
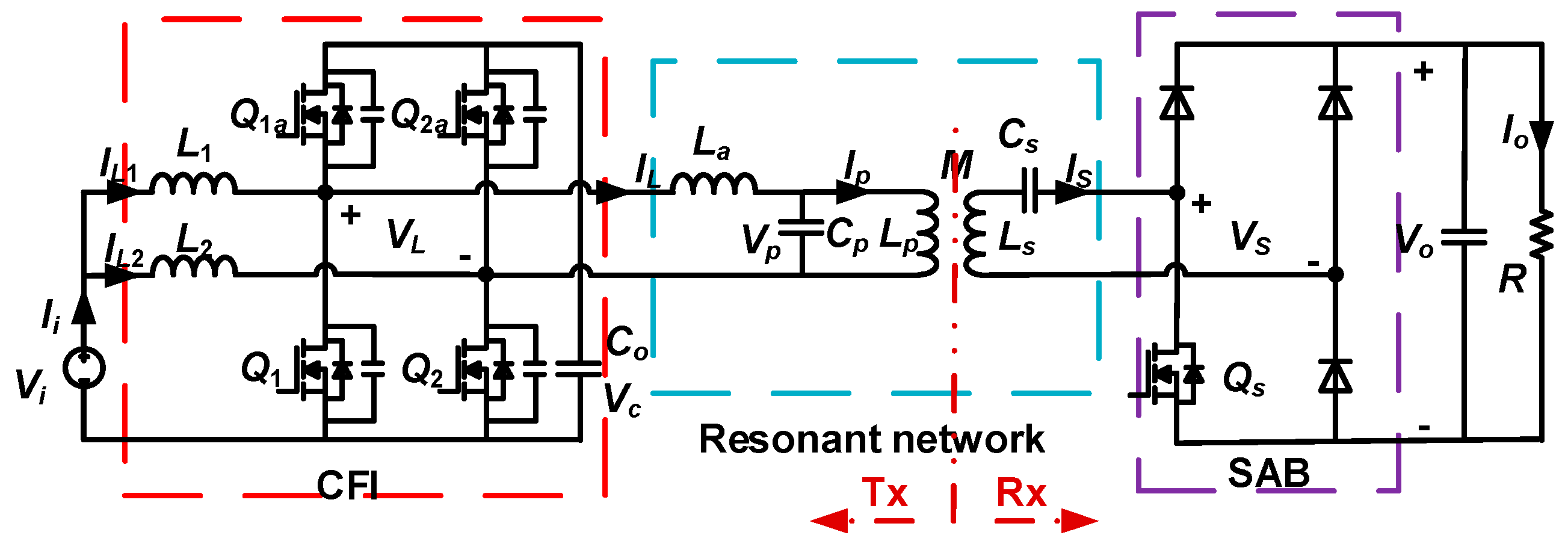
2. Proposed Topology
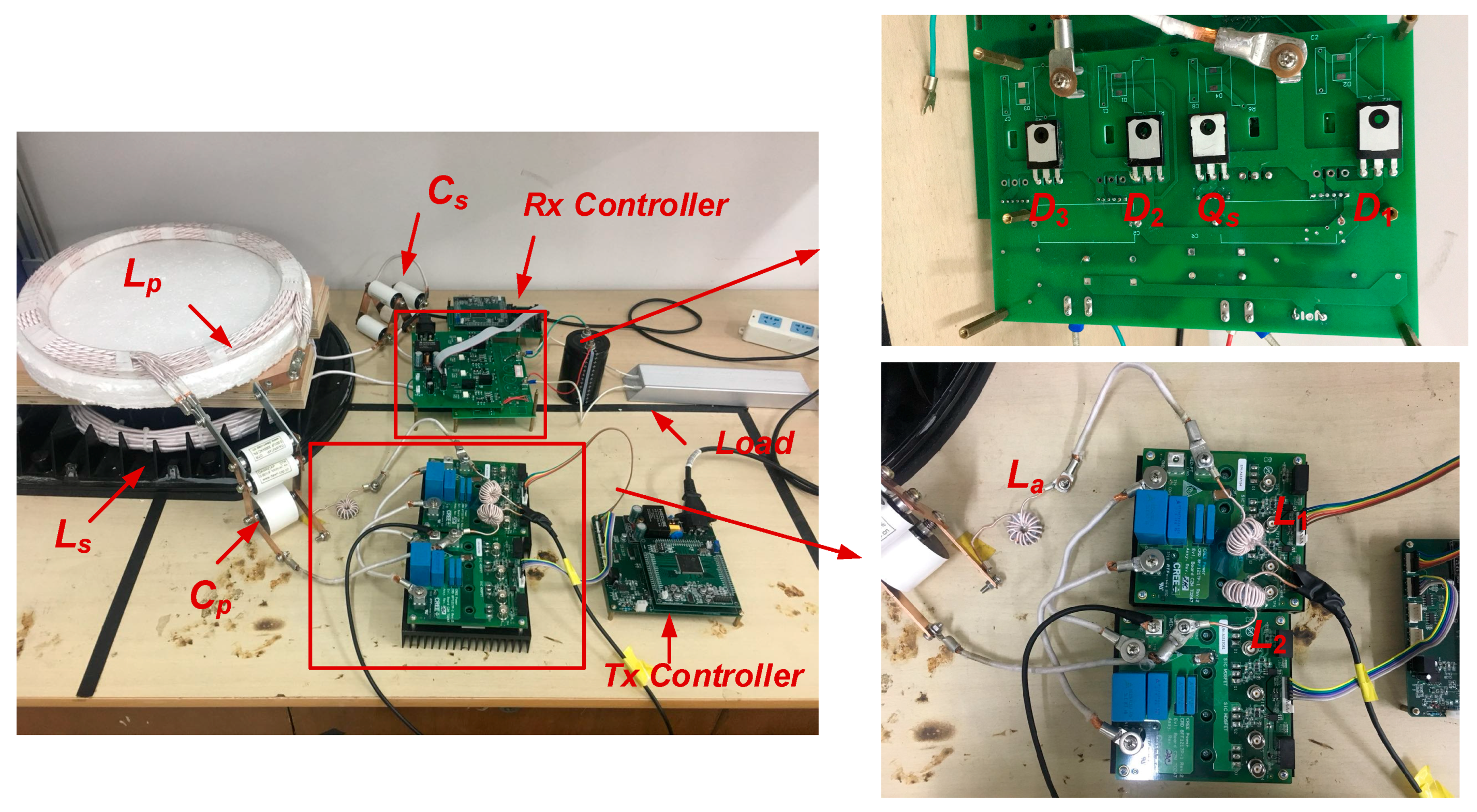
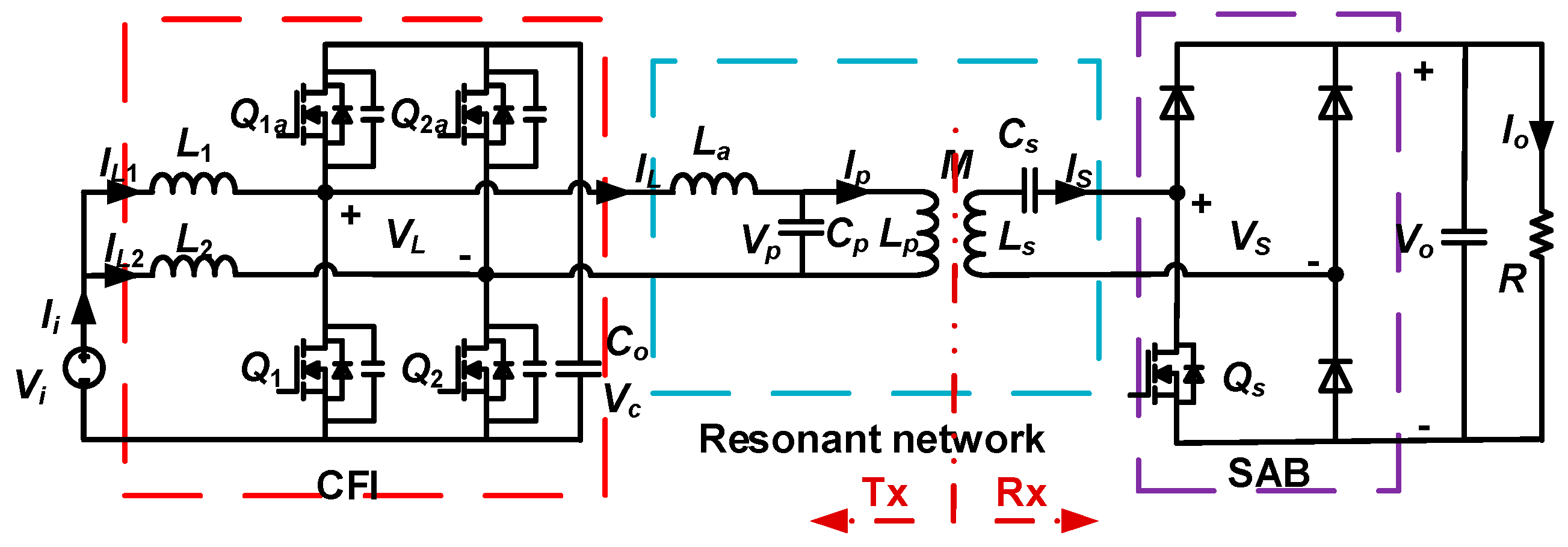
2.1. System Composition
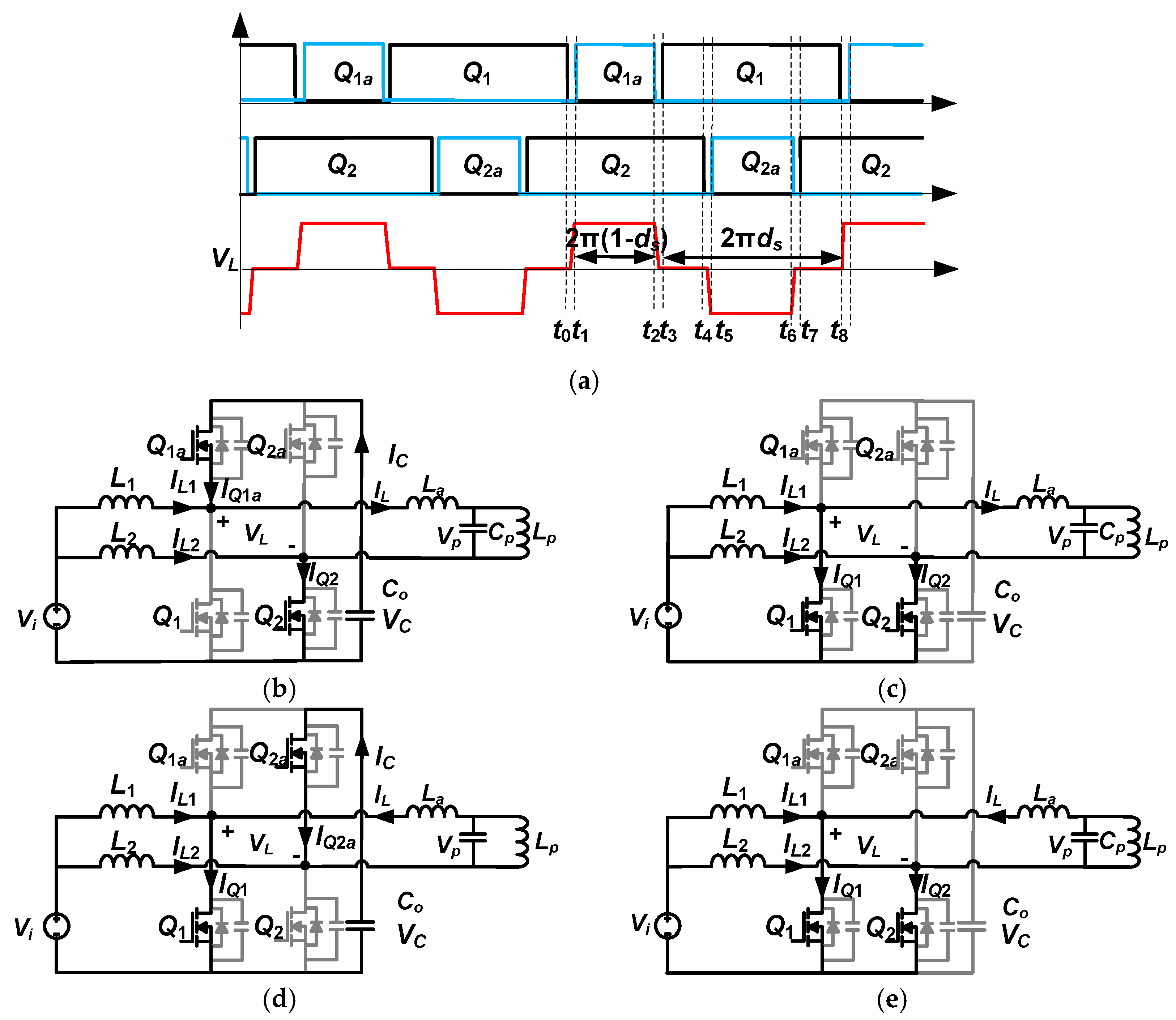
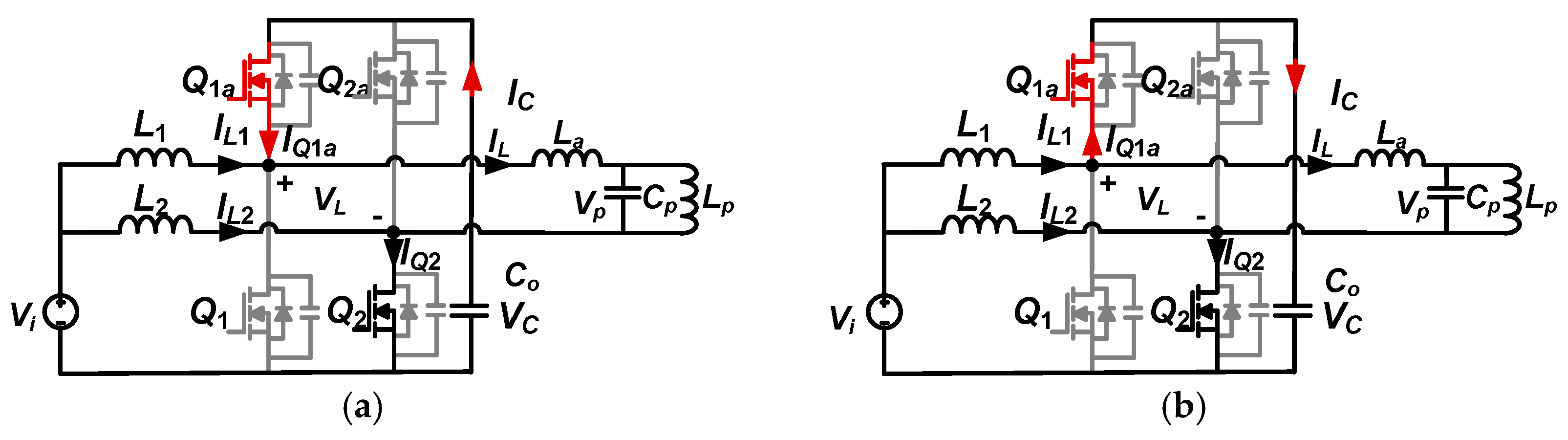
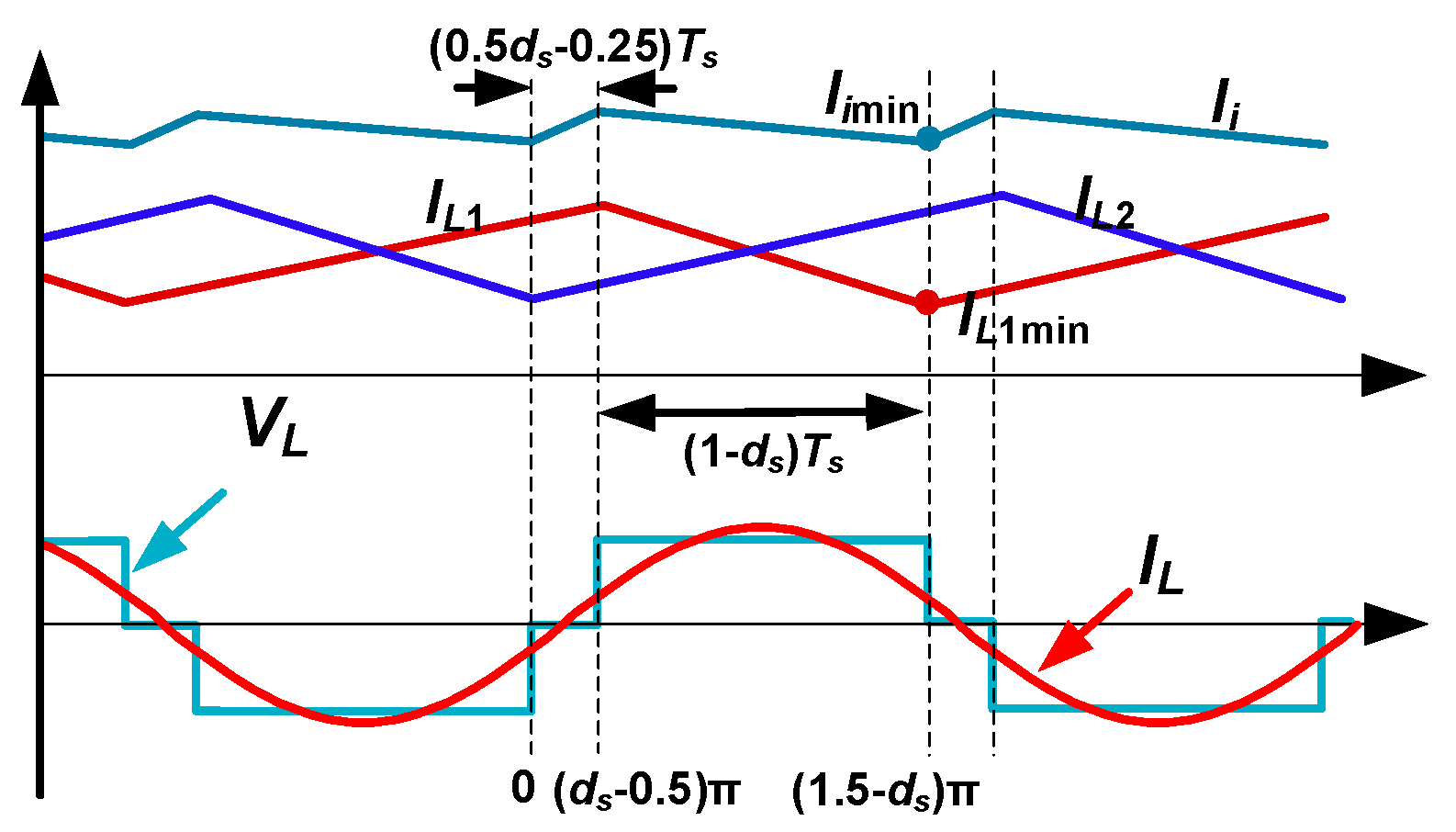
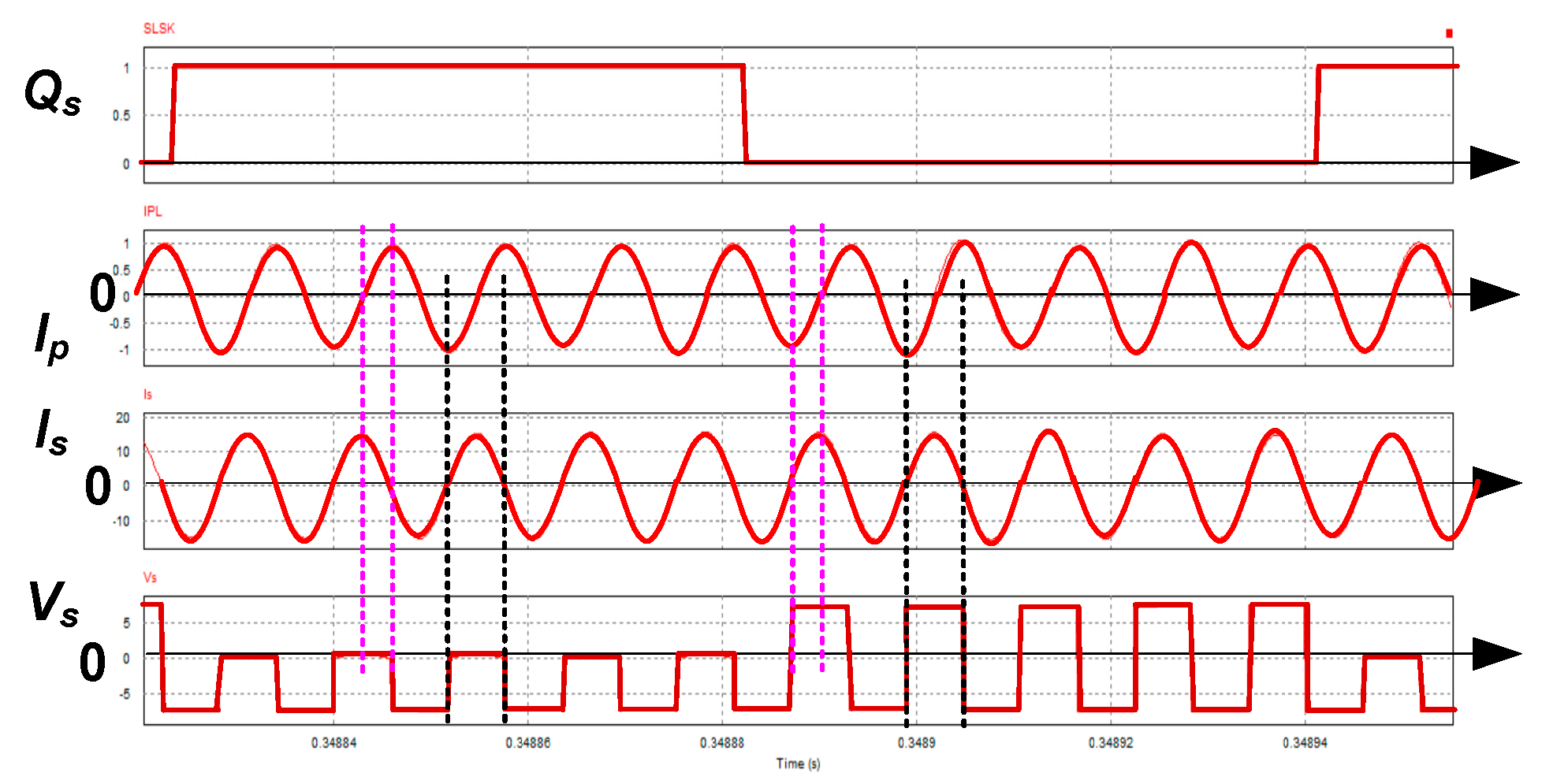
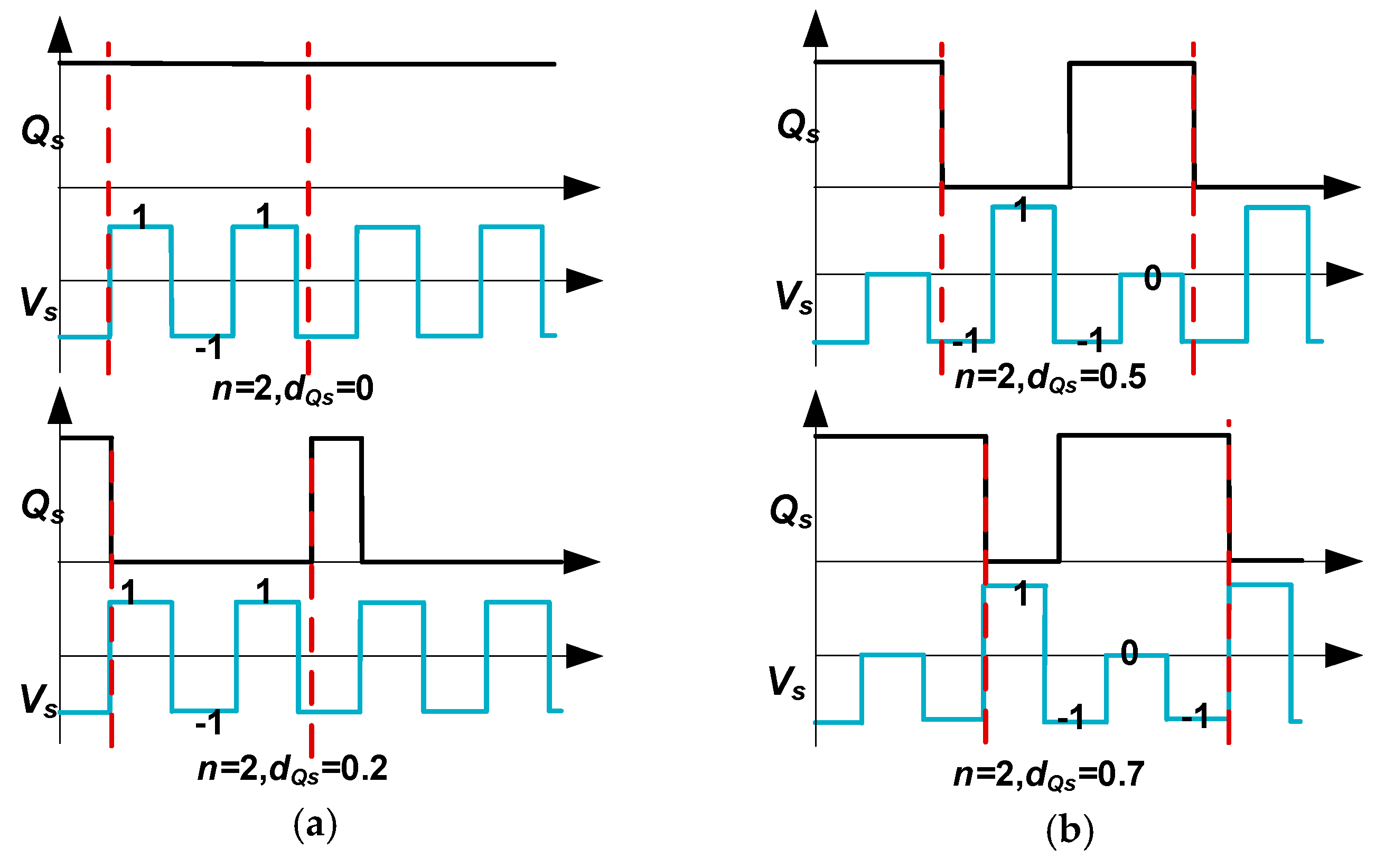
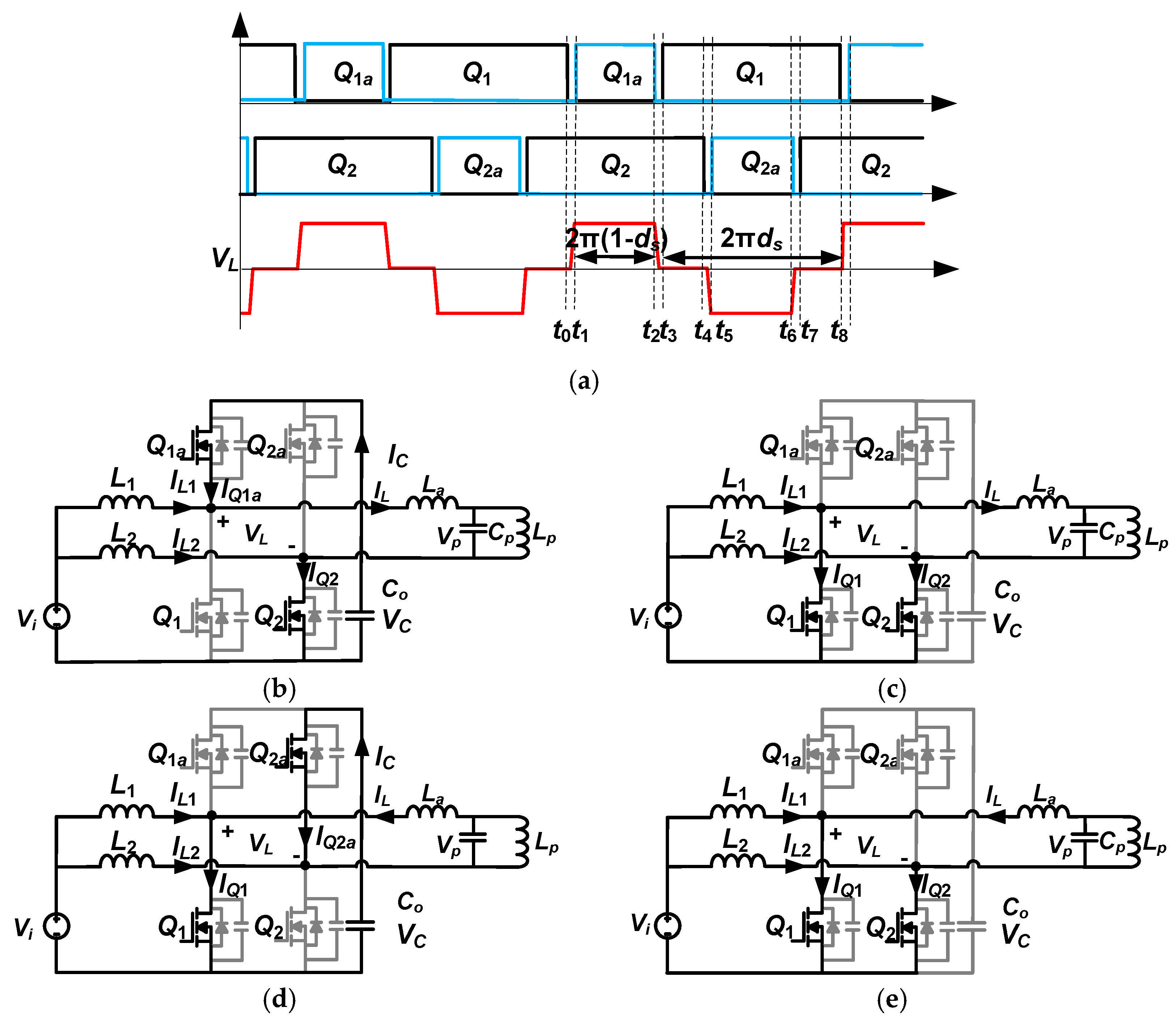
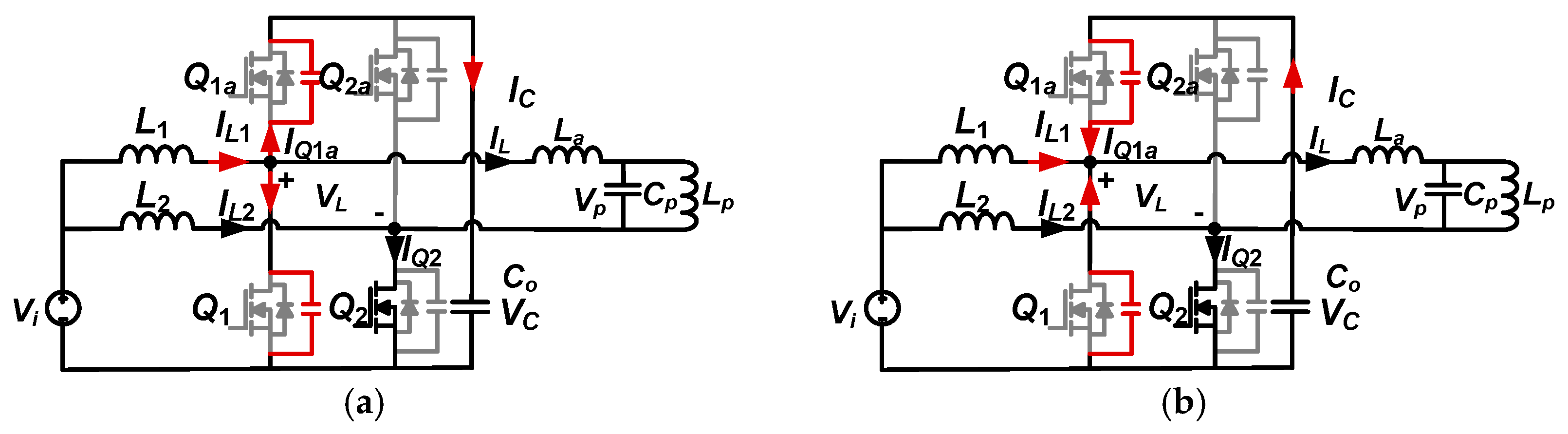
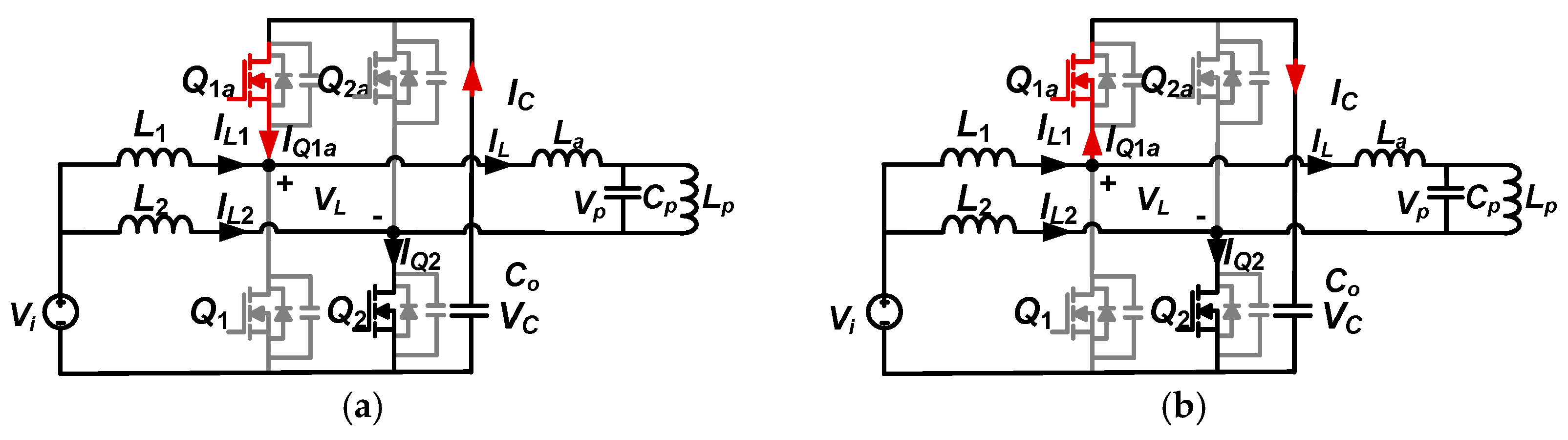
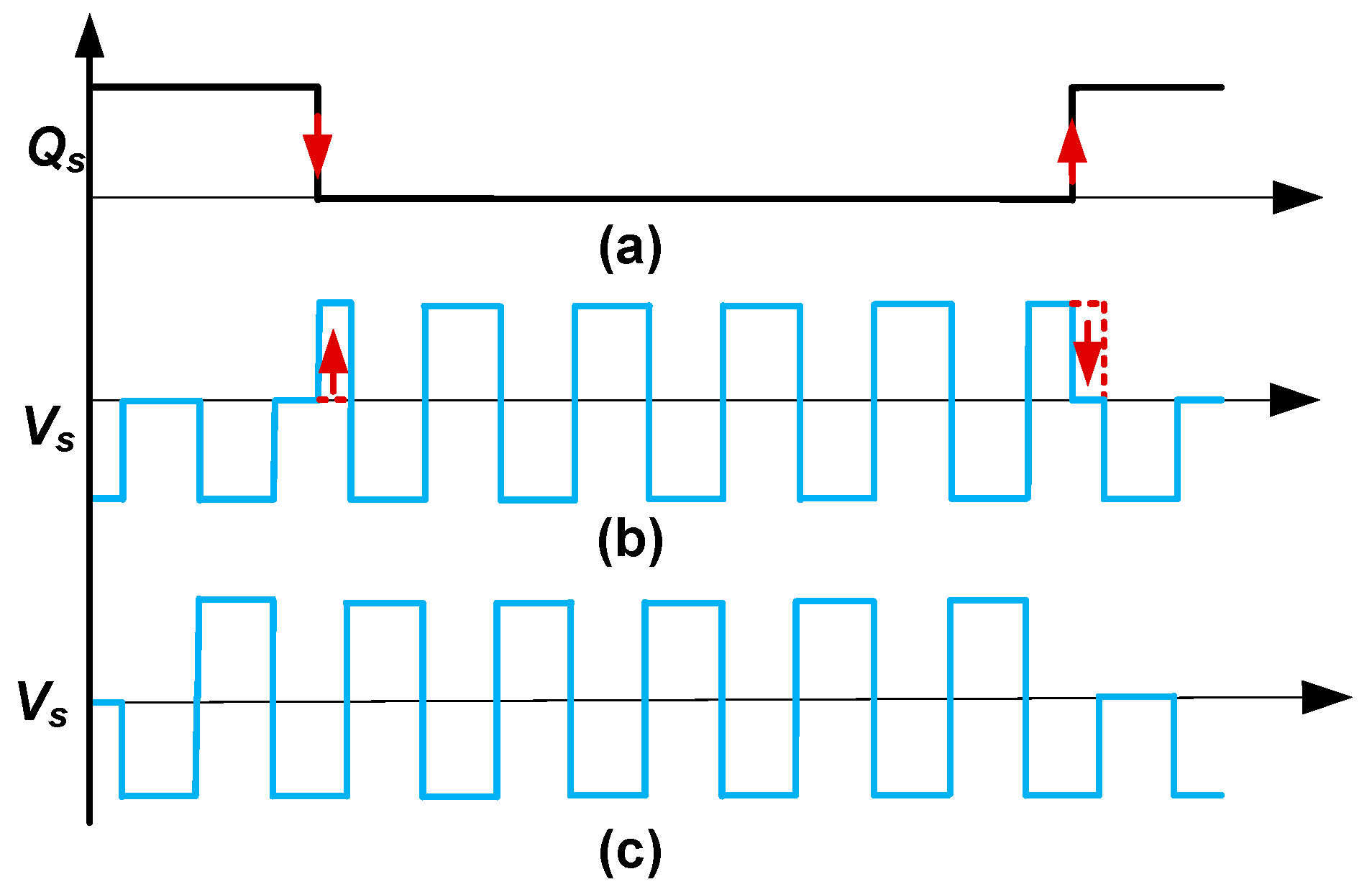
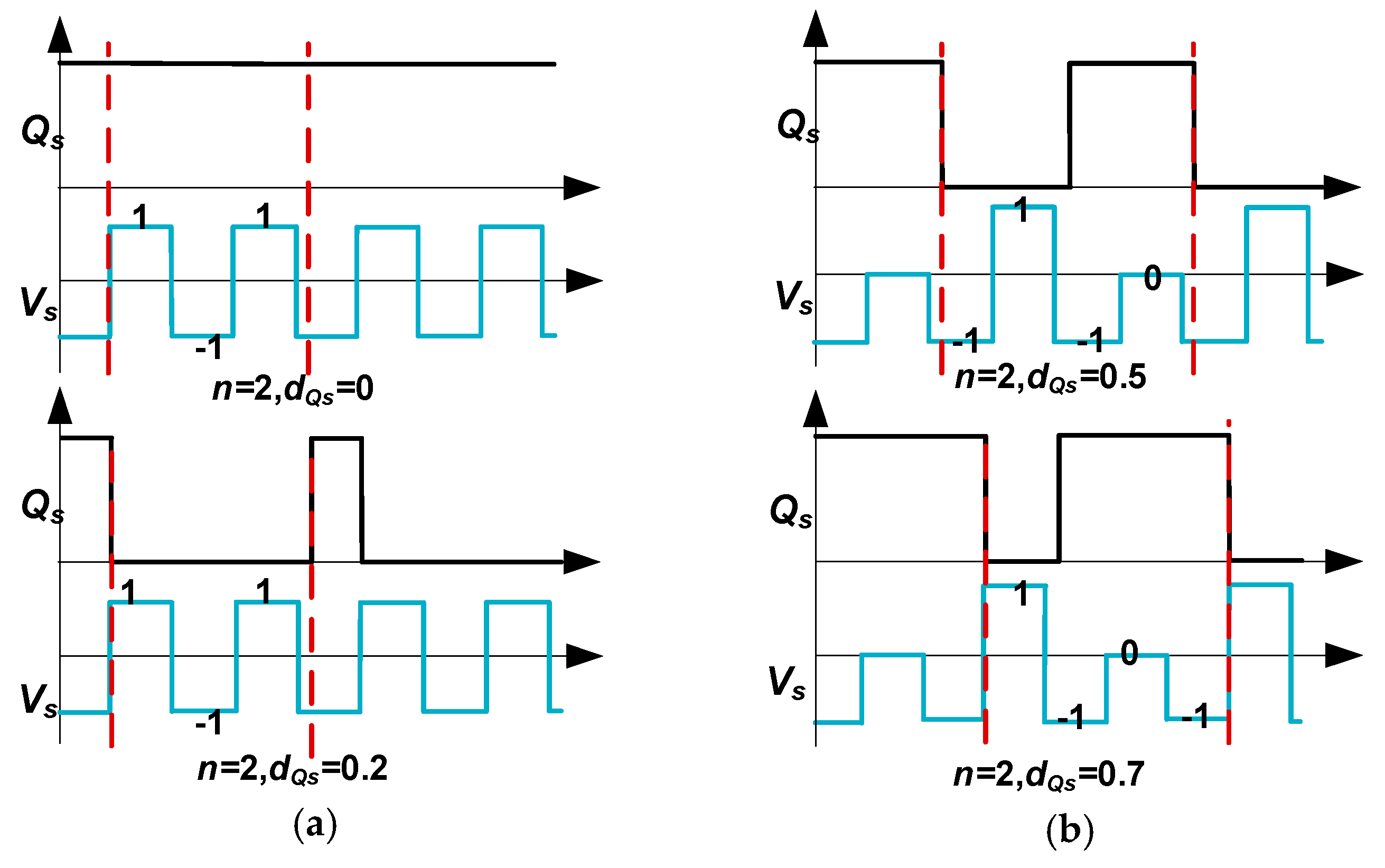
2.2. Operation Patterns in Tx
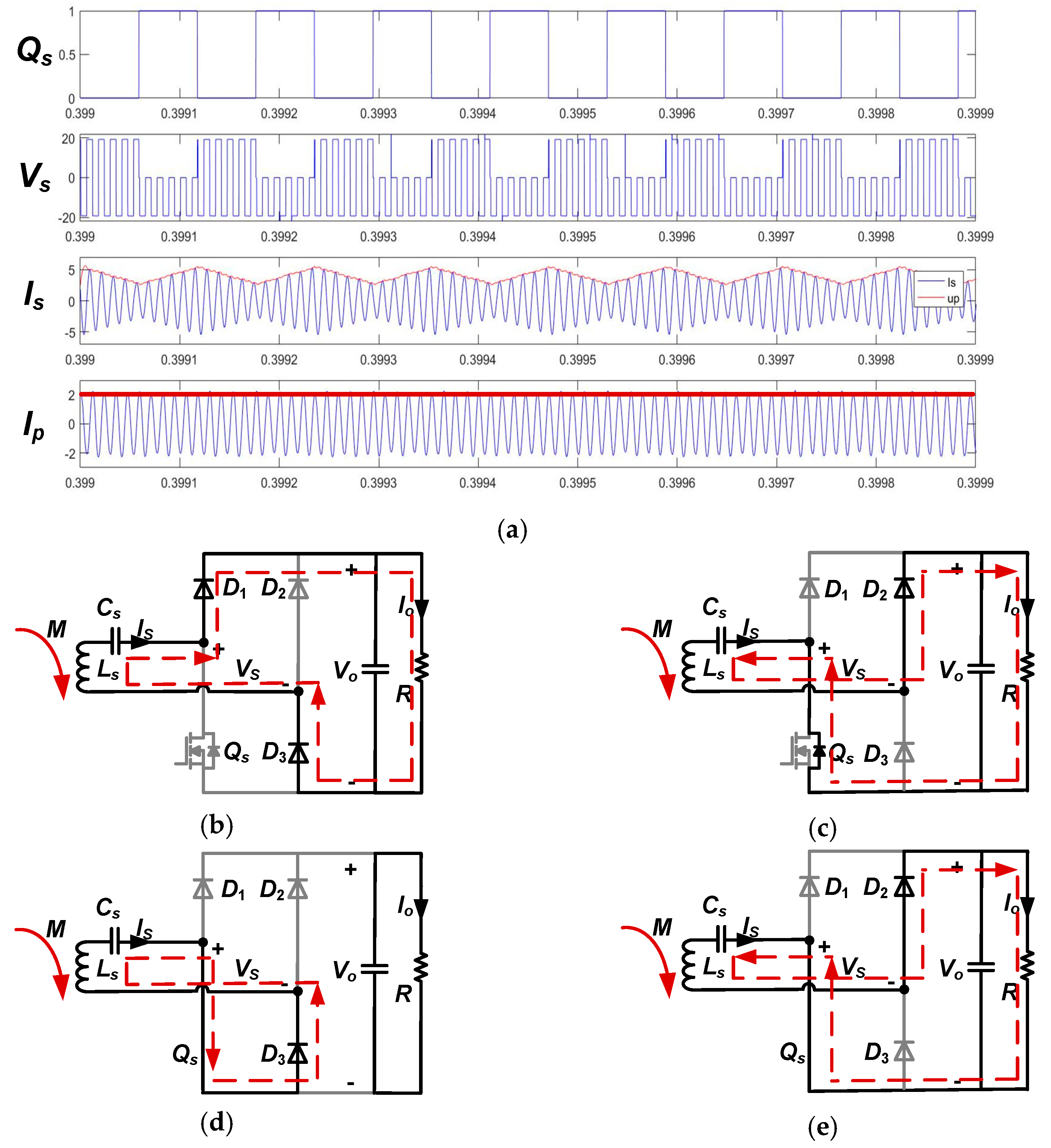
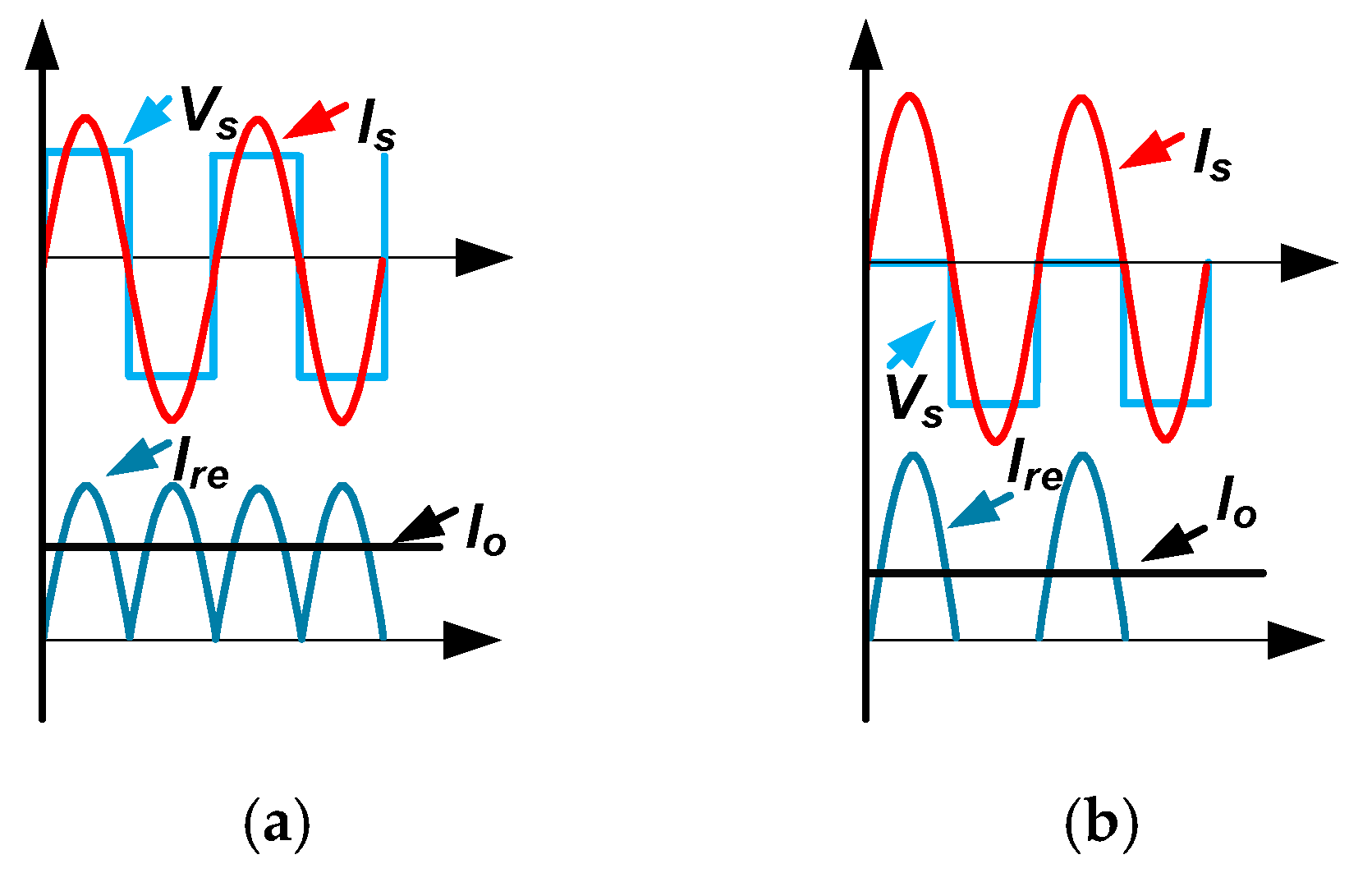
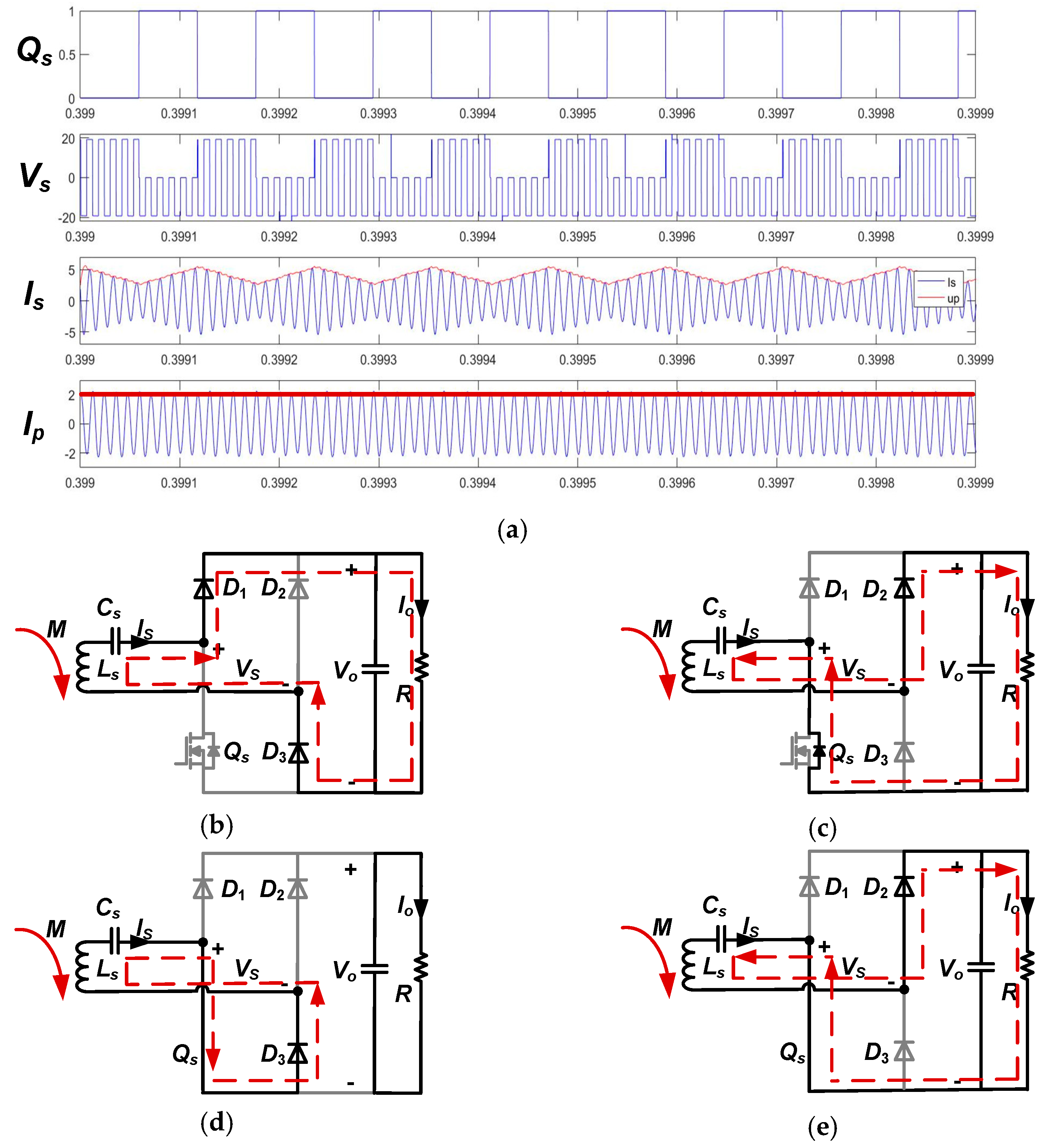
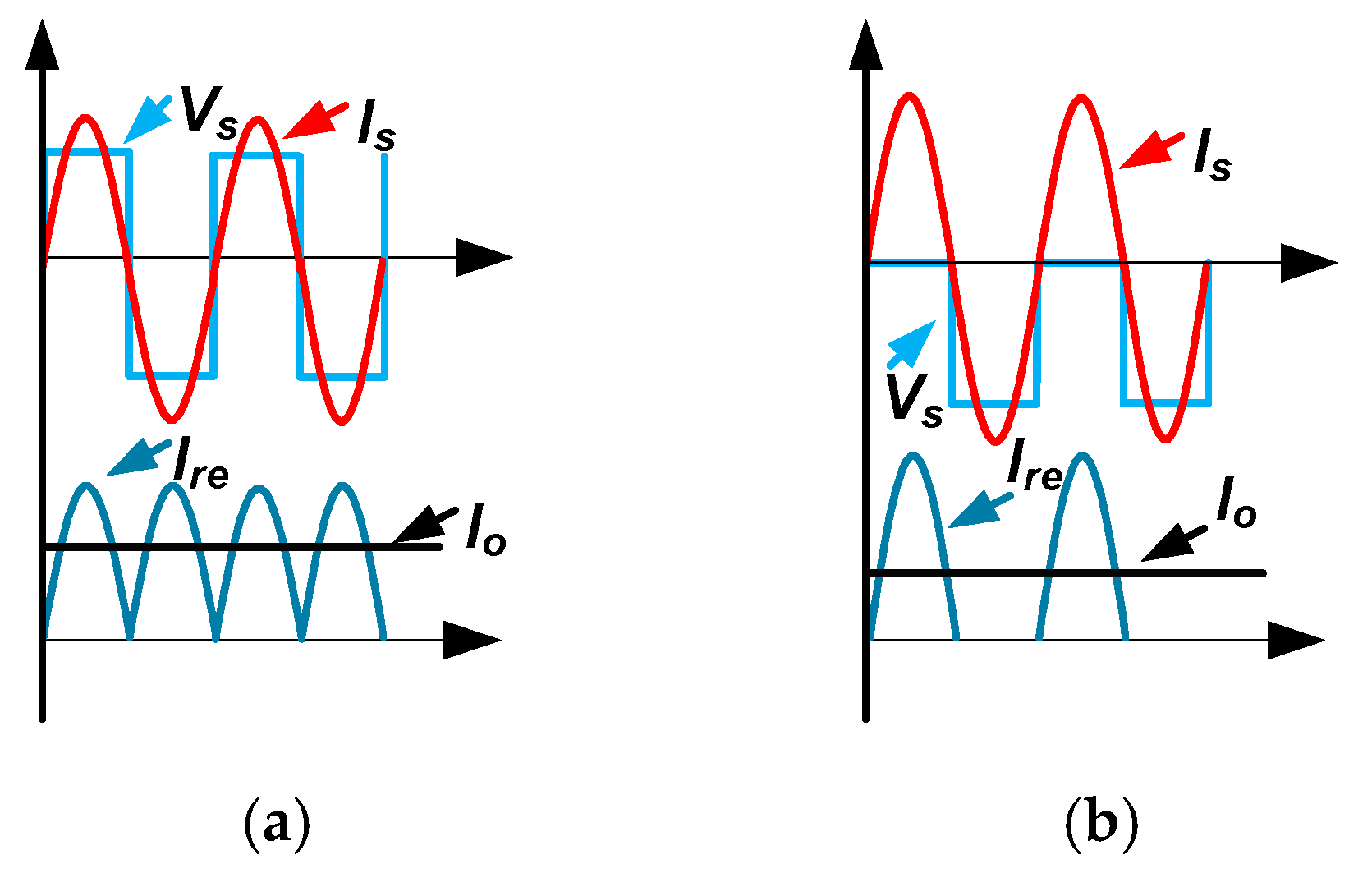
2.3. Operation Patterns in Rx
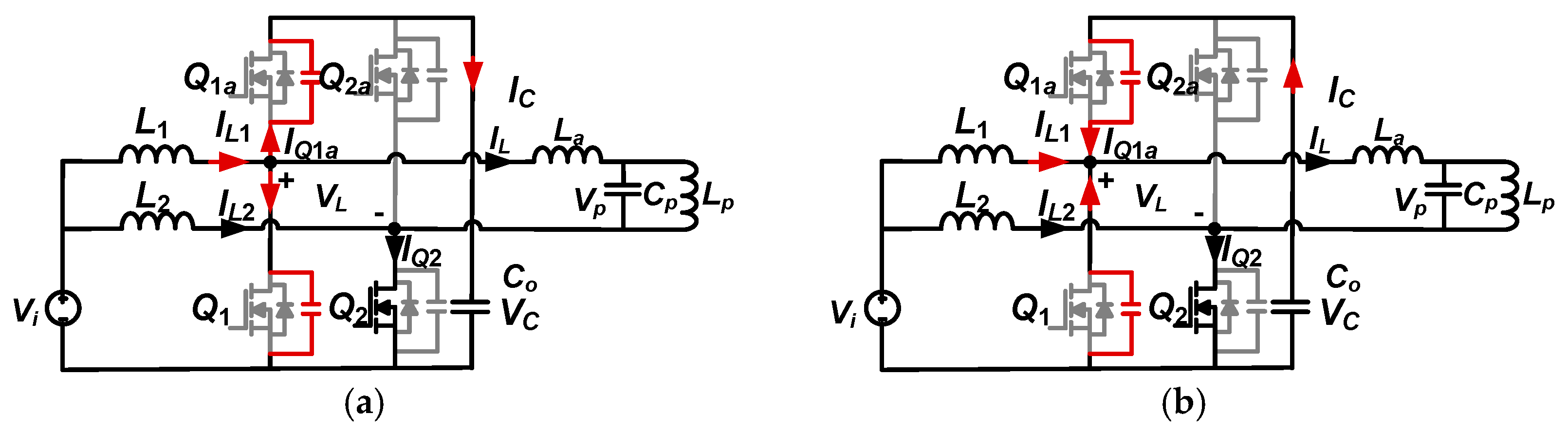
2.4. Soft-Switching Capability
3. Mathematical Modeling and Configuration
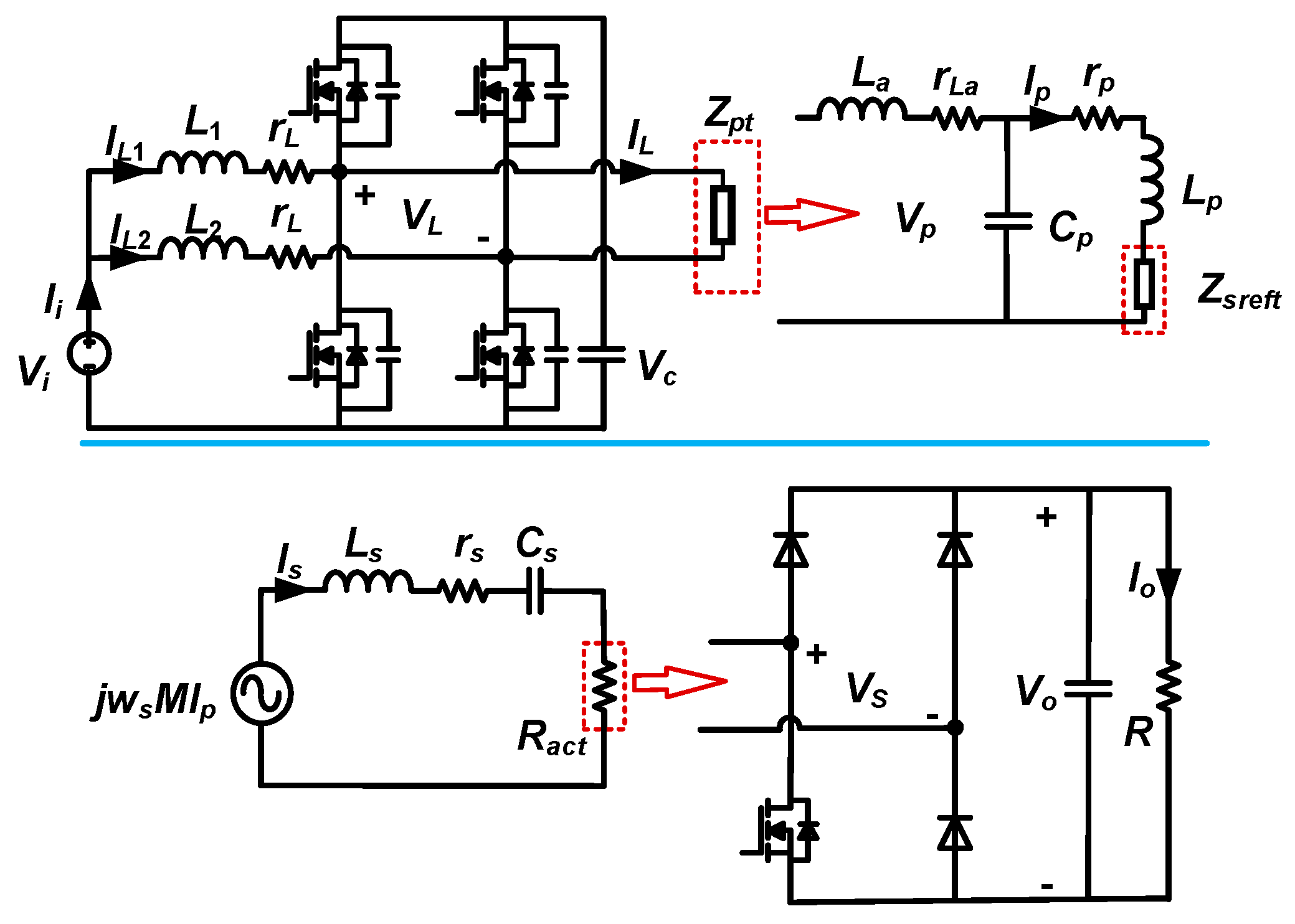
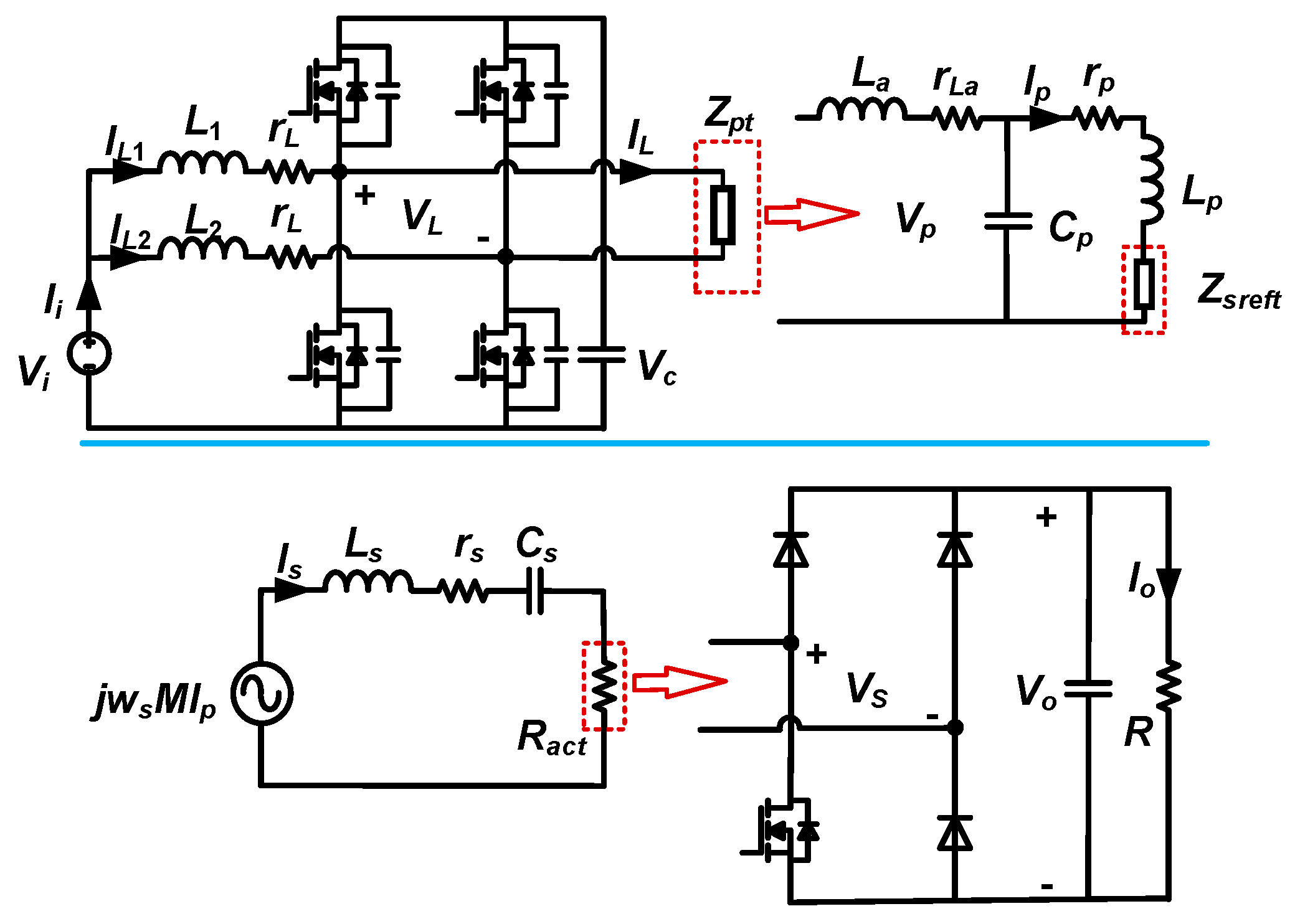
3.1. Equivalent Circuit Model
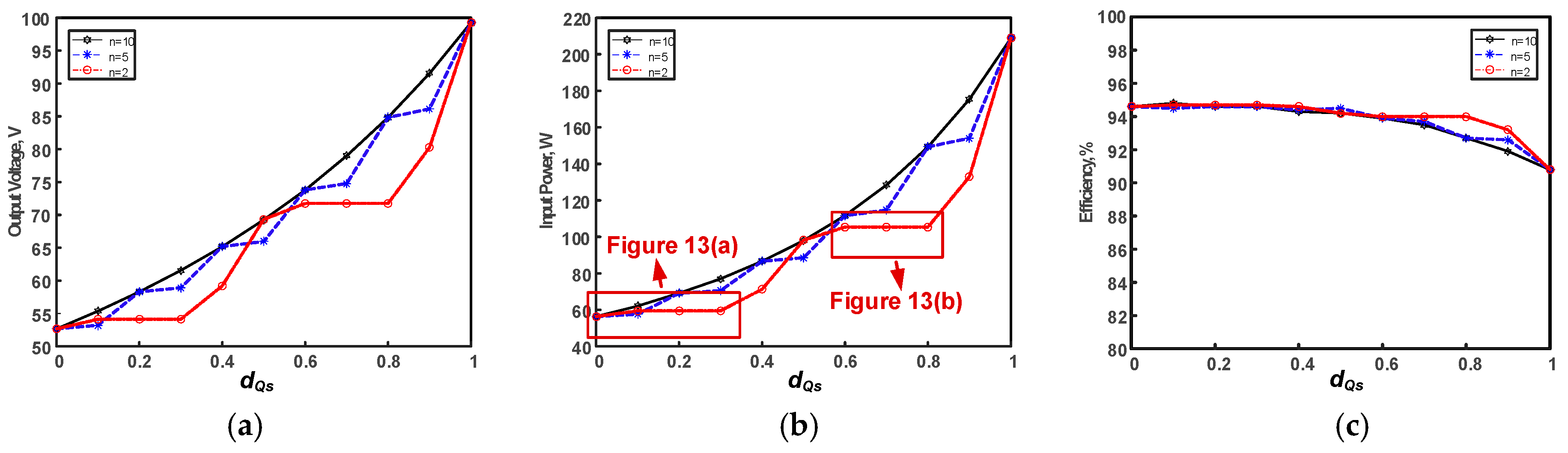
3.2. Equivalent Resistance of SAB
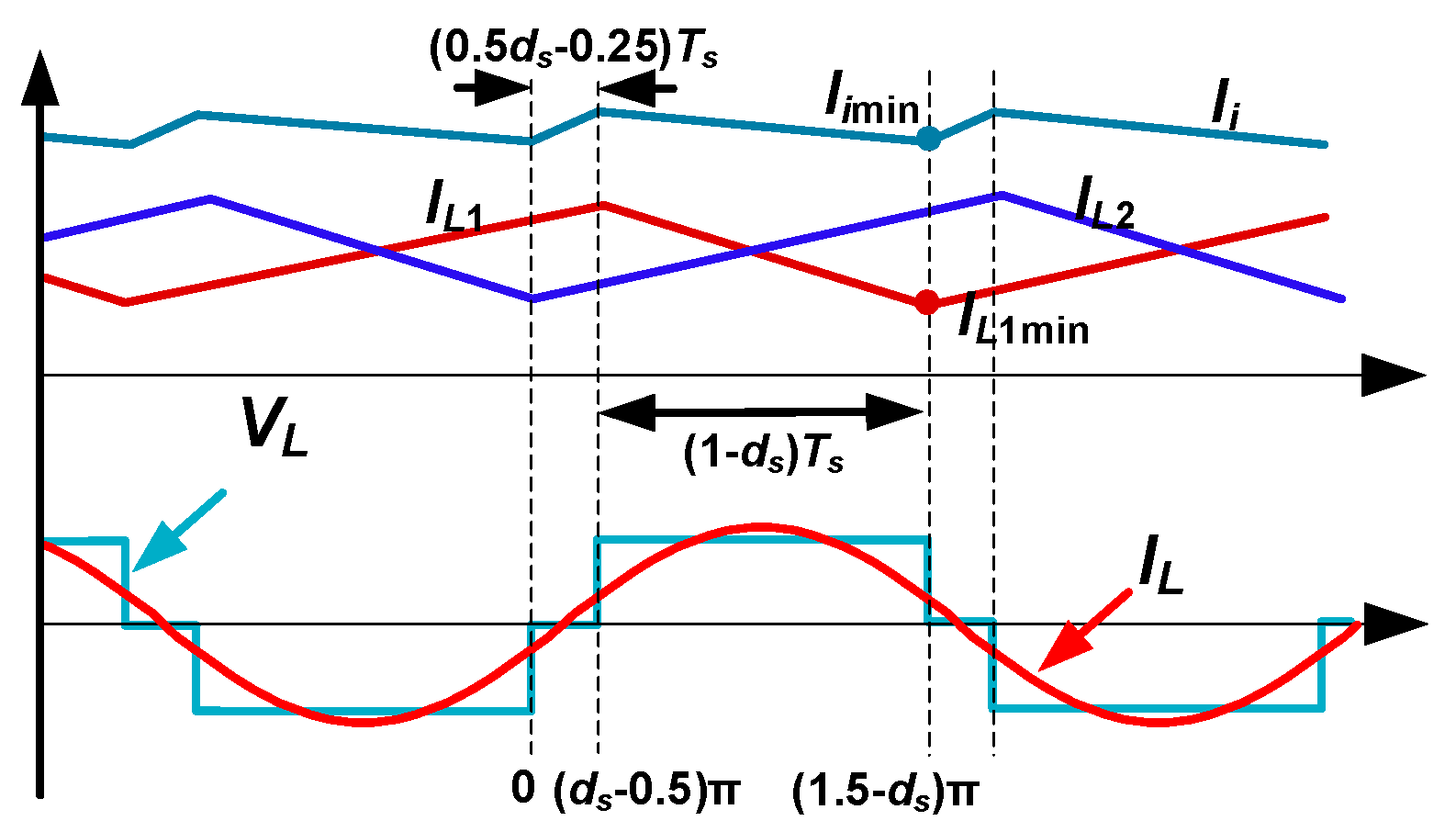
3.3. Soft-Switching Design in Tx
3.4. Optimal Load
4. Simulation and Verification
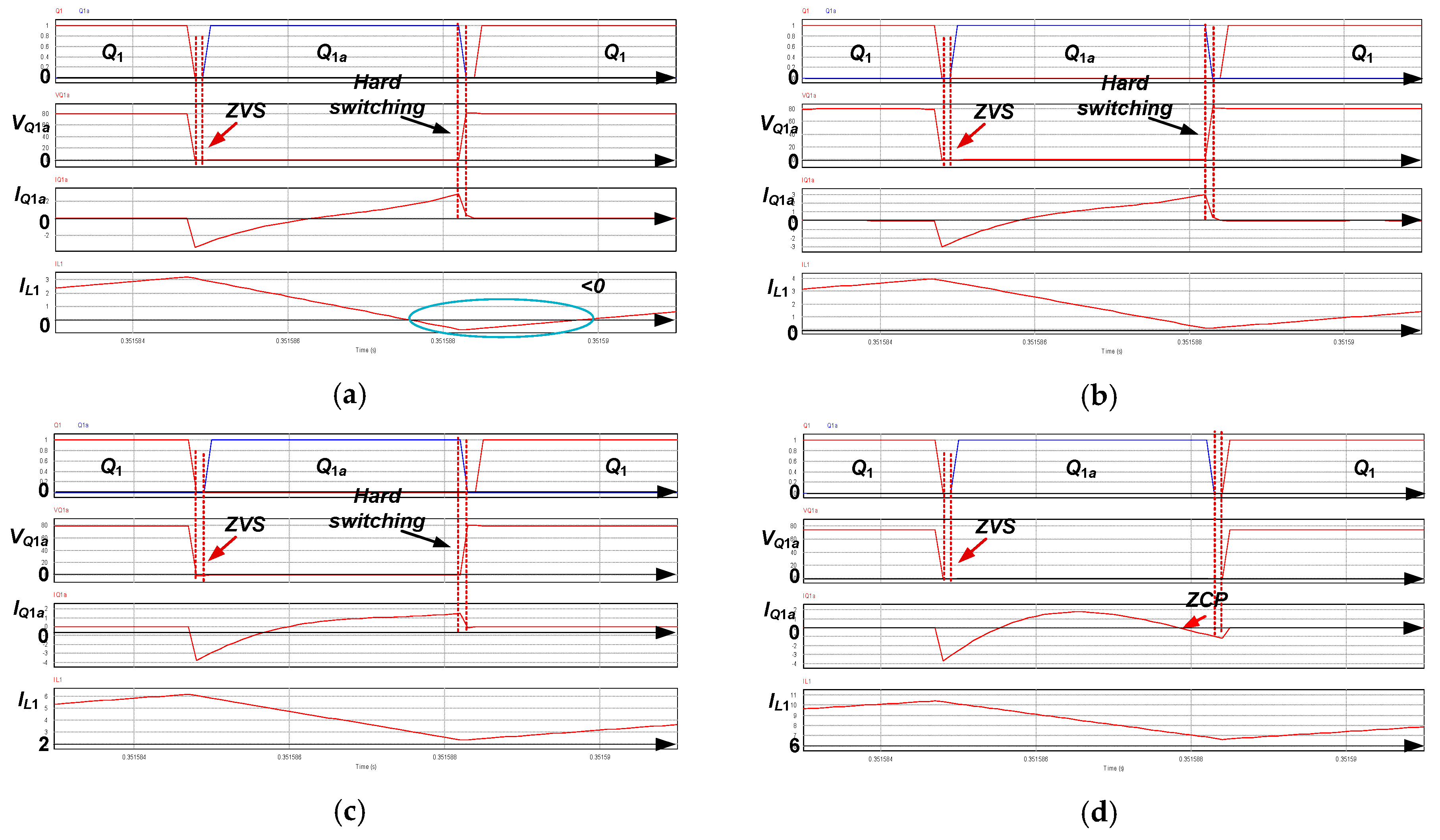
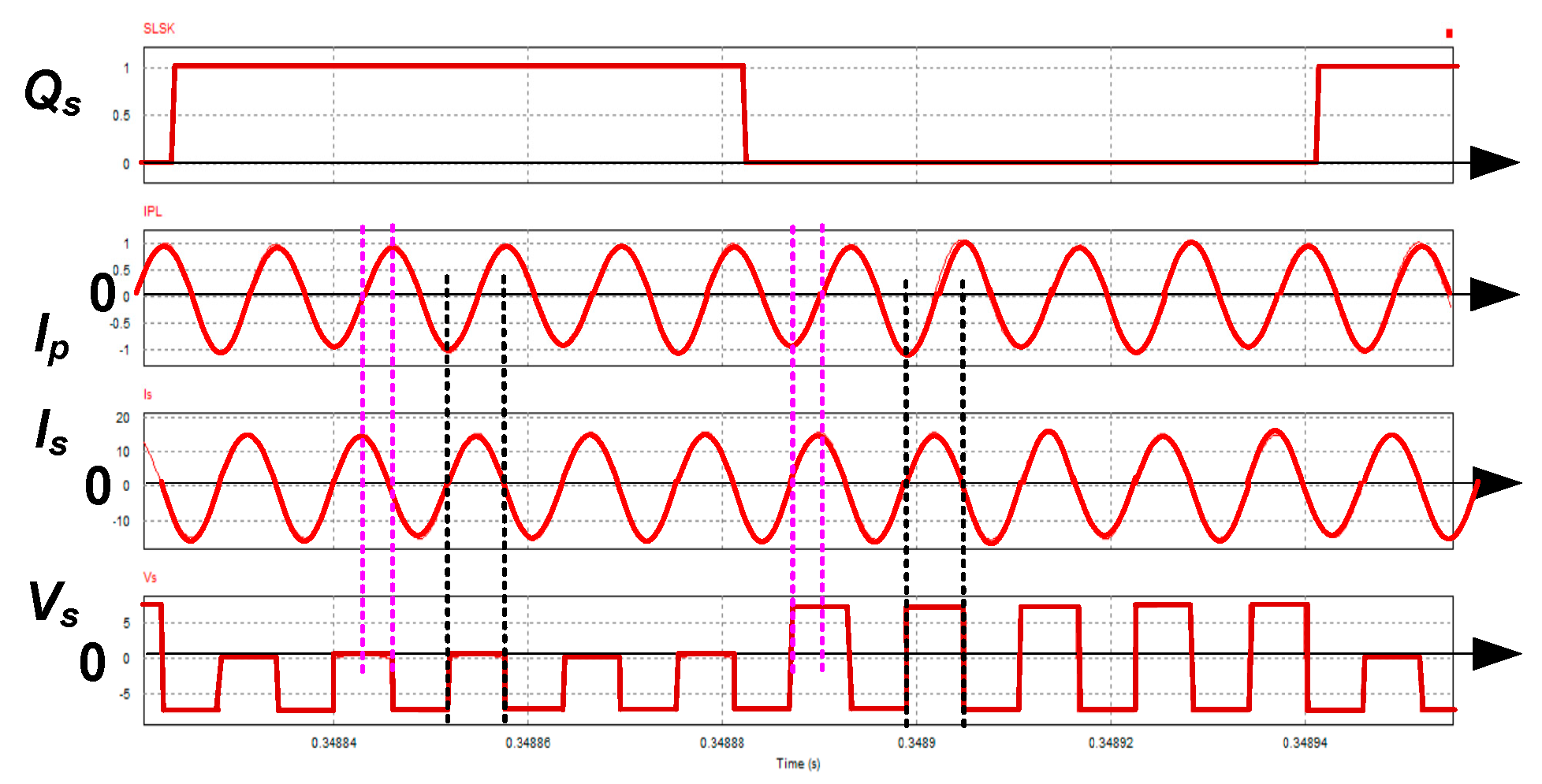
4.1. Soft-Switching Realization
4.2. Equivalent Resistance of SAB and Variation Trend
5. Experimental Result and Discussions
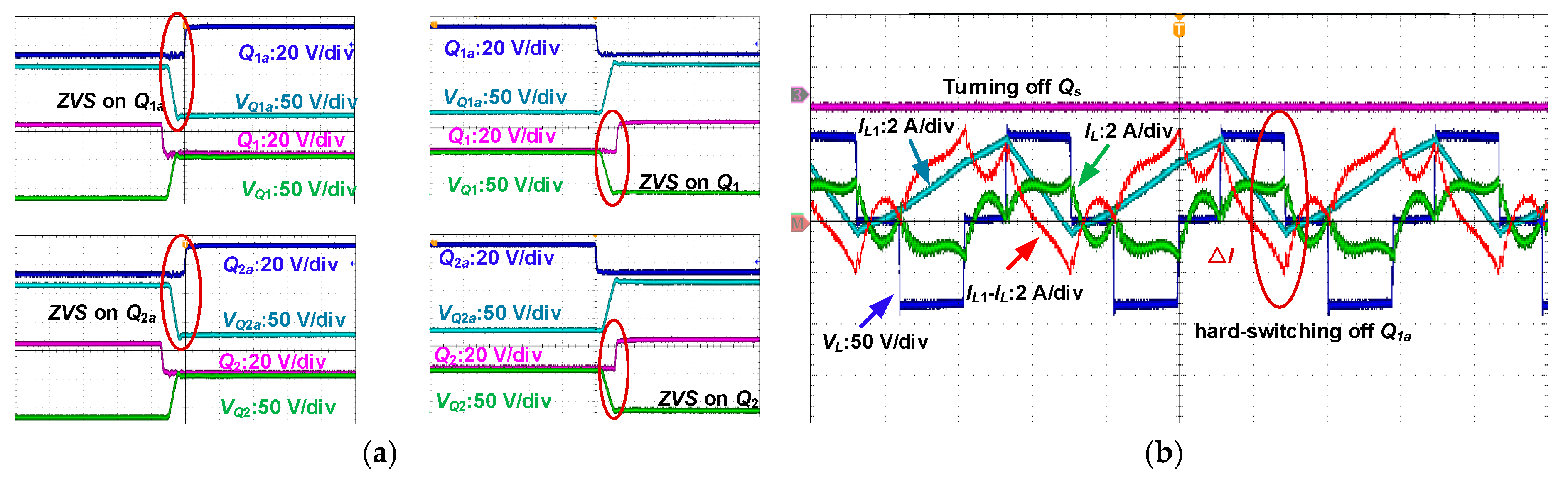
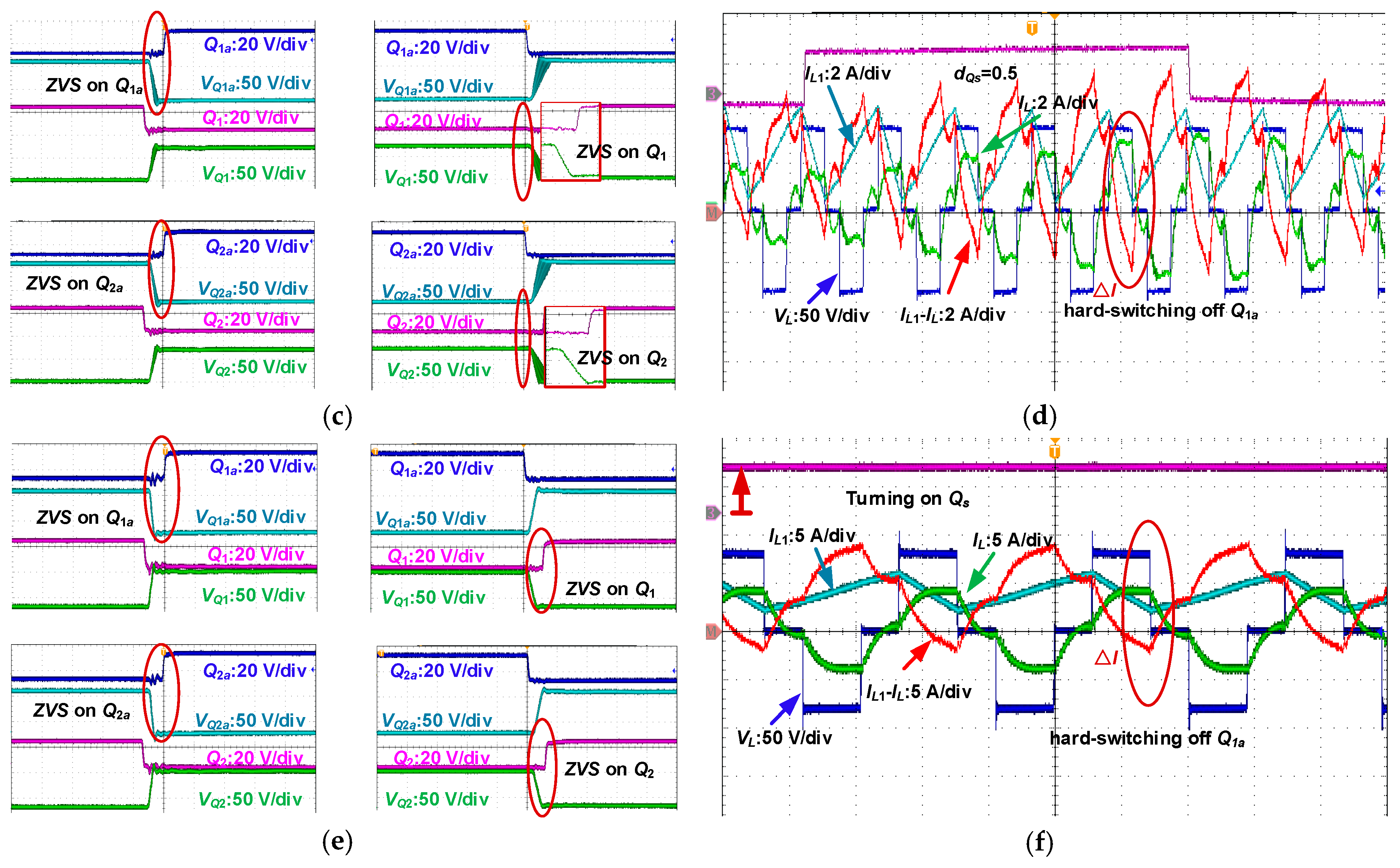
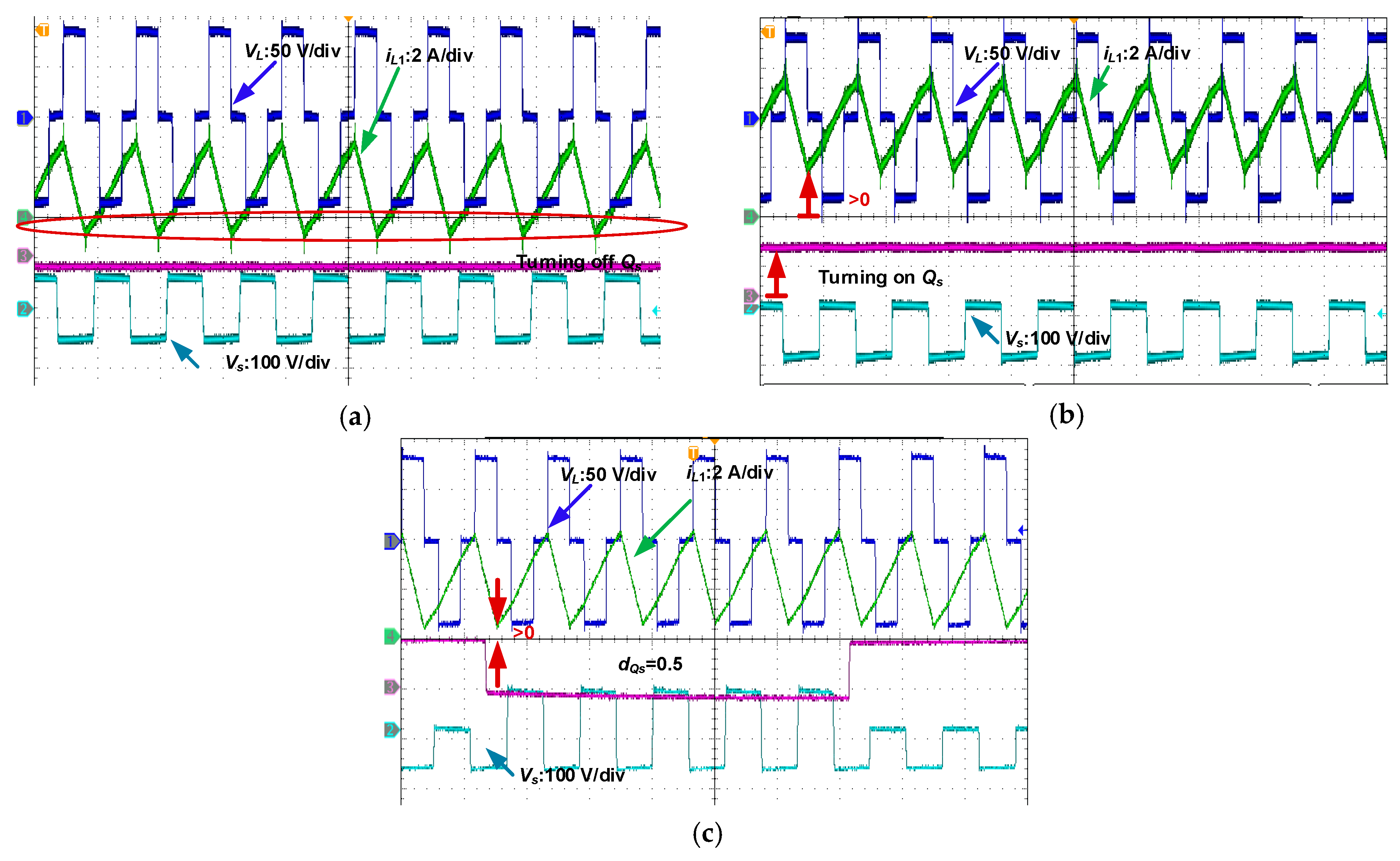
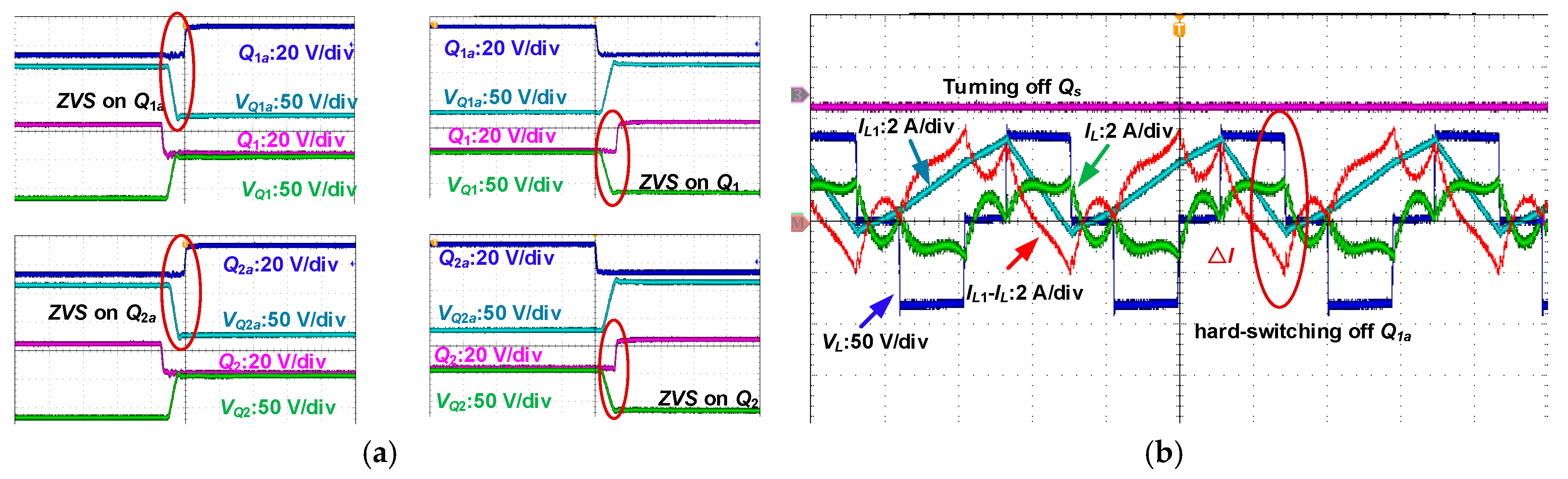
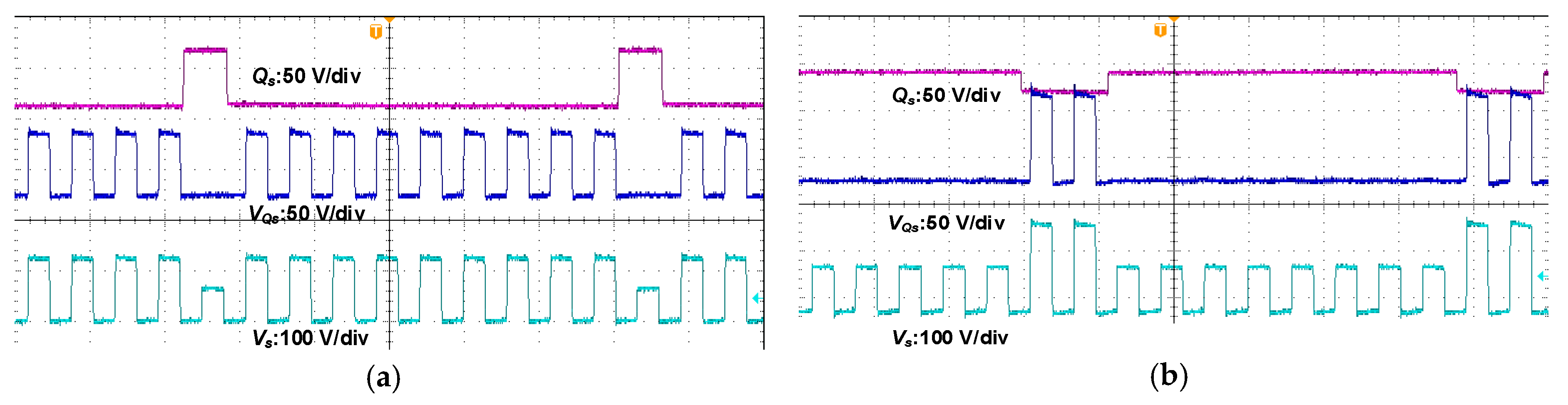
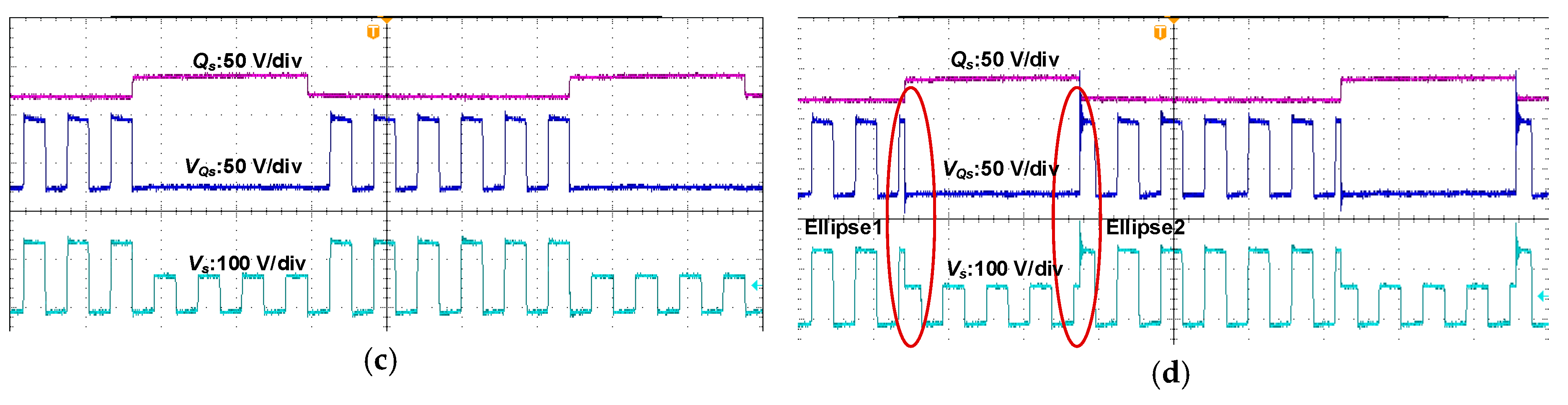
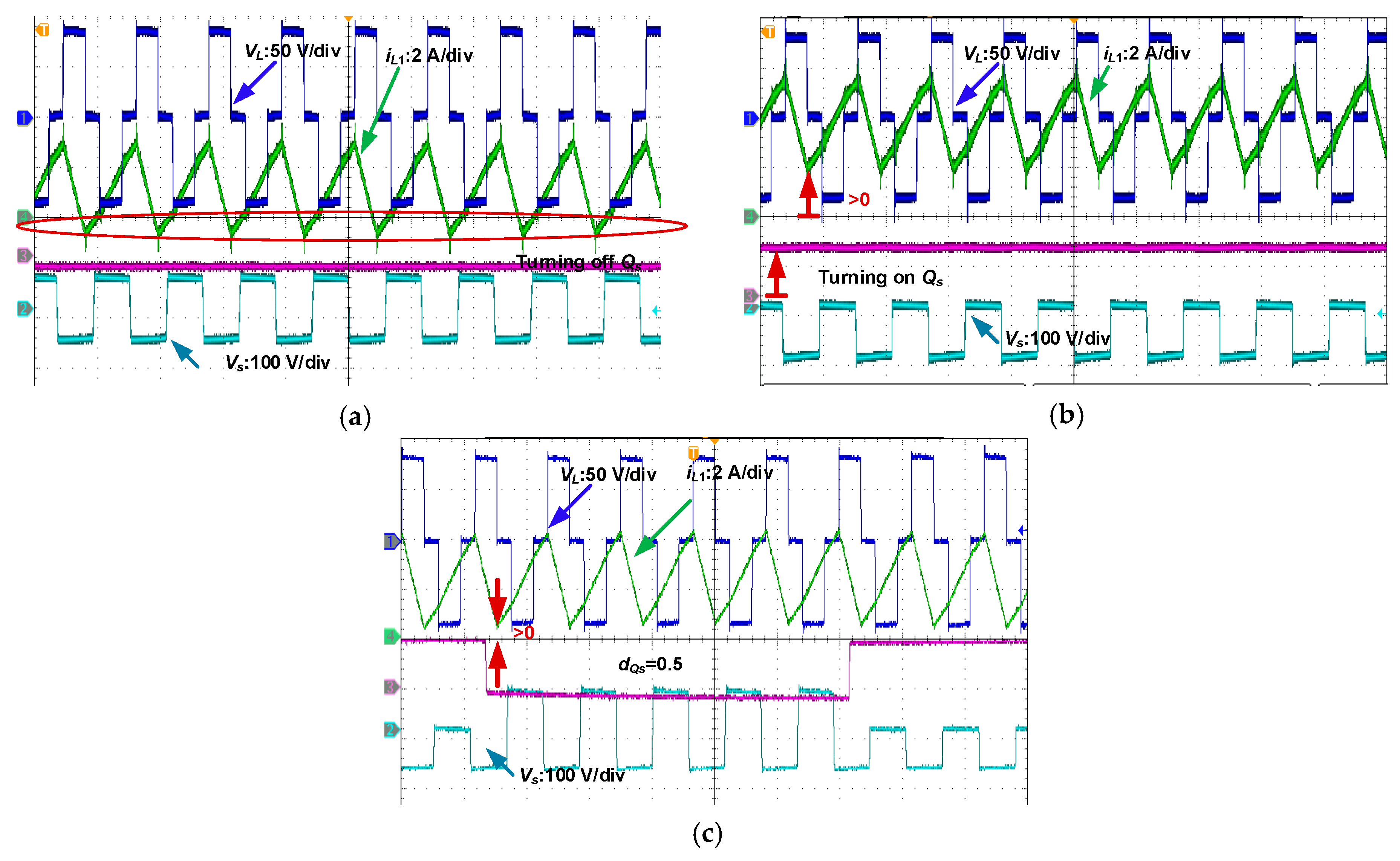
5.1. Soft-Switching Realization
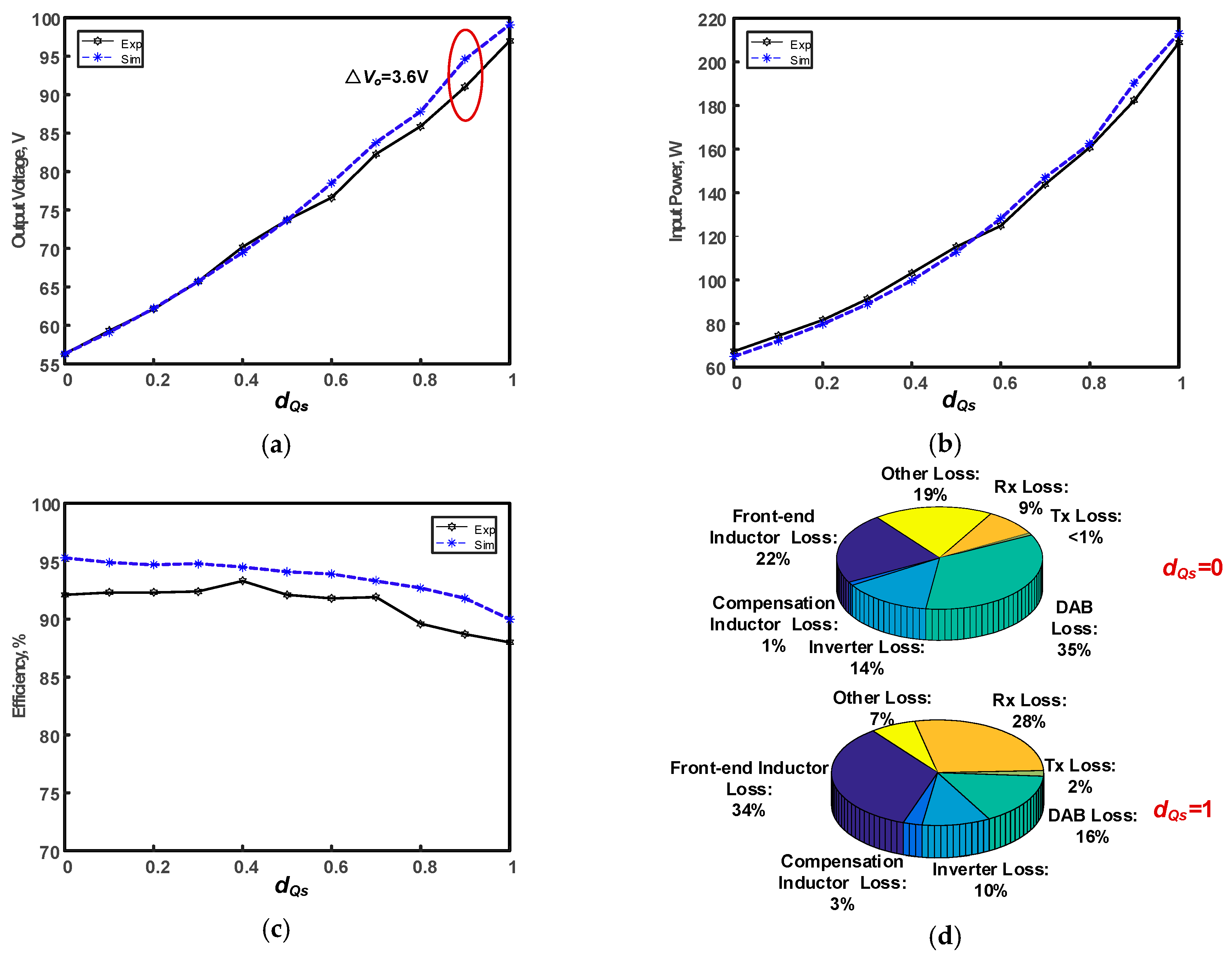
5.2. Efficiency and Loss Estimation
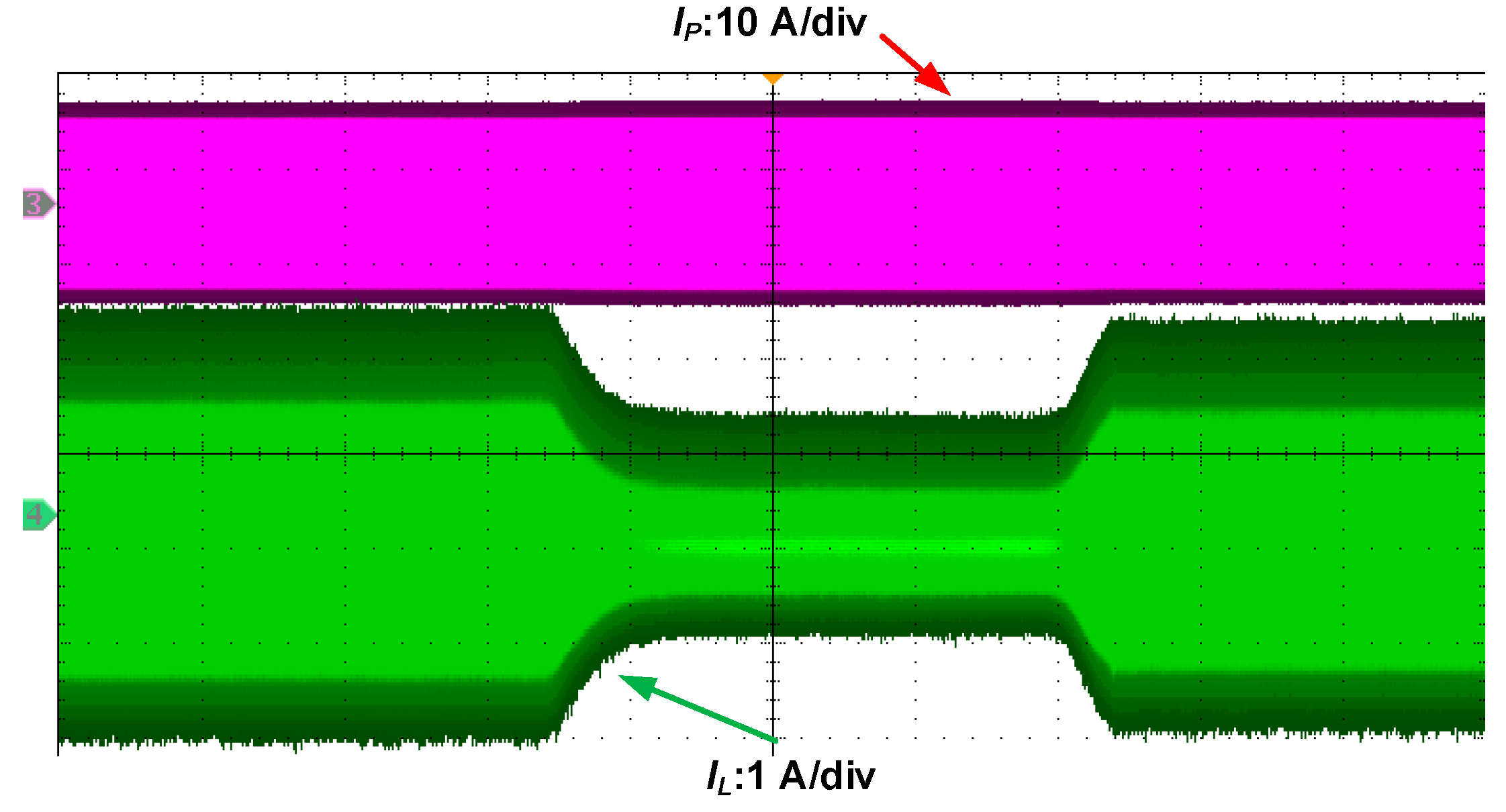
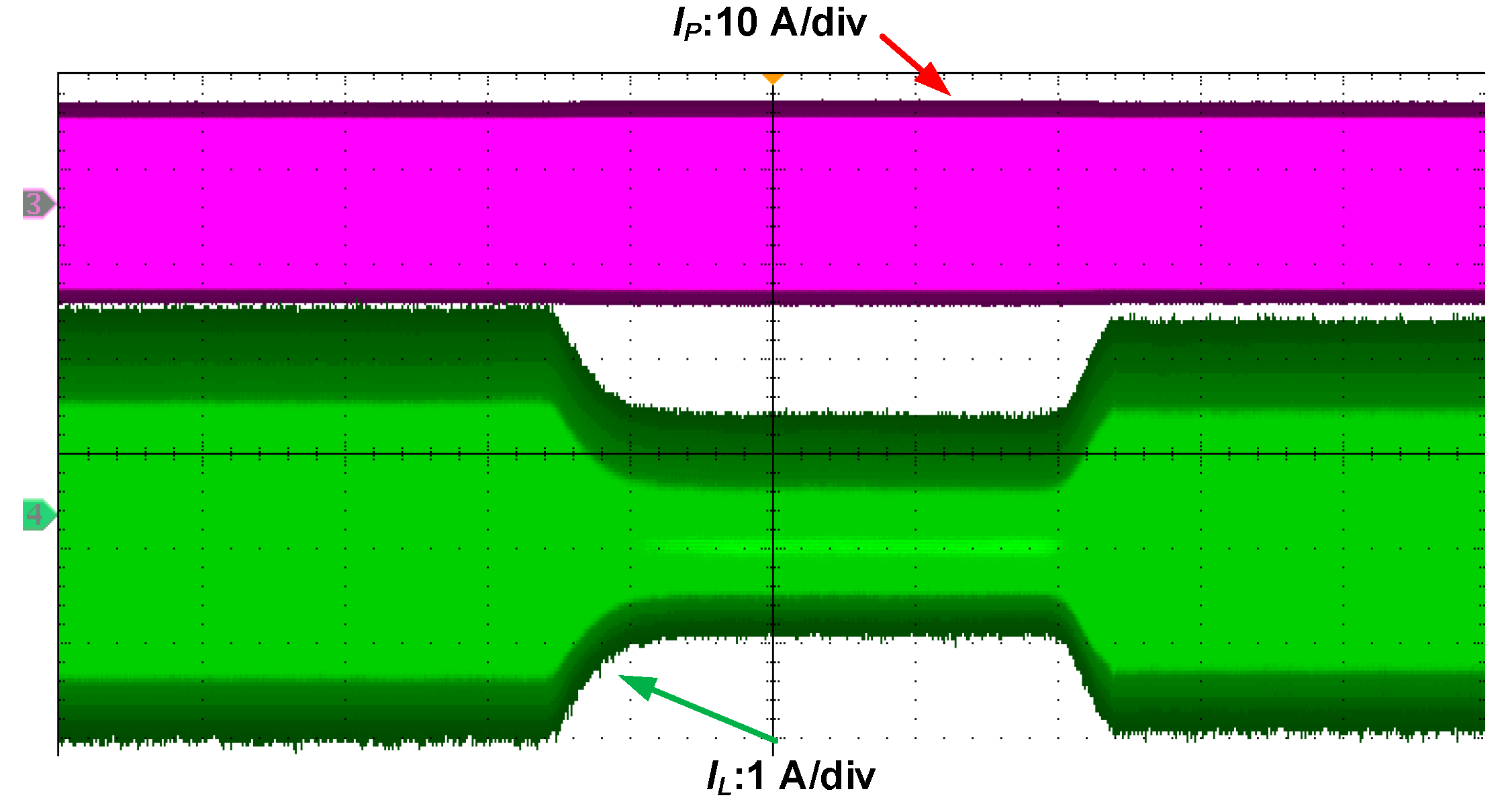
5.3. Load Tripping
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Asheer, S.; Al-Marawani, A.; Khattab, T.; Massoud, A. Inductive power transfer with wireless communication system for electric vehicles. In Proceedings of the 2013 7th IEEE GCC Conference and Exhibition, Doha, Qatar, 17–20 November 2013; pp. 517–522. [Google Scholar]
- Musavi, F.; Eberle, W. Overview of wireless power transfer technologies for electric vehicle battery charging. IET Power Electron. 2014, 7, 60–66. [Google Scholar] [CrossRef]
- Song, K.; Zhu, C.; Kim Ean, K.; Imura, T.; Hori, Y. Wireless power transfer for running EV powering using multi-parallel segmented rails. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power, Daejeon, Korea, 5–6 June 2015. [Google Scholar]
- Yin, N.; Xu, G.; Yang, Q.; Zhao, J.; Yang, X.; Jin, J.; Fu, W.; Sun, M. Analysis of wireless energy transmission for implantable device based on coupled magnetic resonance. IEEE Trans. Magn. 2012, 48, 723–726. [Google Scholar] [CrossRef]
- Ma, A.; Poon, A.S.Y. Midfield wireless power transfer for bioelectronics. IEEE Circuits Syst. Mag. 2015, 15, 54–60. [Google Scholar] [CrossRef]
- Huang, C.Y.; Boys, J.T.; Covic, G.A. LCL pickup circulating current controller for inductive power transfer systems. IEEE Trans. Power Electron. 2013, 28, 2081–2093. [Google Scholar] [CrossRef]
- Qu, X.; Han, H.; Wong, S.C.; Chi, K.T.; Chen, W. Hybrid IPT topologies with constant current or constant voltage output for battery charging applications. IEEE Trans. Power Electron. 2015, 30, 6329–6337. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.C.; Chi, K.T.; Chen, Q. Analysis and comparison of secondary series- and parallel-compensated inductive power transfer systems operating for optimal efficiency and load-independent voltage-transfer ratio. IEEE Trans. Power Electron. 2014, 29, 2979–2990. [Google Scholar] [CrossRef]
- Ge, S.; Liu, C.; Li, H.; Guo, Y.; Cai, G.W. Double-LCL resonant compensation network for electric vehicles wireless power transfer: Experimental study and analysis. IET Power Electron. 2016, 9, 2262–2270. [Google Scholar]
- Sohn, Y.H.; Choi, B.H.; Lee, E.S.; Lim, G.C.; Cho, G.H.; Rim, C.T. General unified analyses of two-capacitor inductive power transfer systems: Equivalence of current-source SS and SP compensations. IEEE Trans. Power Electron. 2015, 30, 6030–6045. [Google Scholar] [CrossRef]
- Tan, L.; Pan, S.; Xu, C.; Yan, C.; Liu, H.; Huang, X. Study of constant current-constant voltage output wireless charging system based on compound topologies. J. Power Electron. 2017, 17, 1109–1116. [Google Scholar]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A double-sided LCC compensation network and its tuning method for wireless power transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Xiao, C.; Cheng, D.; Wei, K. An LCC-C compensated wireless charging system for implantable cardiac pacemakers: Theory, experiment, and safety evaluation. IEEE Trans. Power Electron. 2018, 33, 4894–4905. [Google Scholar] [CrossRef]
- Dai, X.; Li, W.; Li, Y.; Su, Y.; Tang, C.; Wang, Z.; Sun, Y. Improved LCL resonant network for inductive power transfer system. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (WoW), Daejeon, Korea, 5–6 June 2015. [Google Scholar]
- Peng, F. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Zeng, H.; Peng, F.Z. SiC based Z-source resonant converter with constant frequency and load regulation for EV wireless charger. IEEE Trans. Power Electron. 2017, 32, 8813–8822. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Town, G. Improved modulation Technique for voltage fed quasi-Z-source DC/DC converter. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014; pp. 1973–1978. [Google Scholar]
- Wang, T.; Liu, X.; Tang, H.; Ali, M. Modification of the wireless power transfer system with Z-source inverter. IET Electron. Lett. 2017, 53, 106–108. [Google Scholar] [CrossRef]
- Shen, M.; Peng, F. Operation modes and characteristics of the Z-source inverter with small inductance or low power factor. IEEE Trans. Ind. Electron. 2008, 55, 89–96. [Google Scholar] [CrossRef]
- Sha, D.; You, F.; Wang, X. A high-efficiency current-fed semi-dual-active bridge DC-DC converter for low input voltage applications. IEEE Trans. Ind. Electron. 2016, 63, 2155–2164. [Google Scholar] [CrossRef]
- Sha, D.; Wang, X.; Chen, D. High efficiency current-fed dual active bridge DC-DC converter with ZVS achievement throughout full range of load using optimized switching patterns. IEEE Trans. Power Electron. 2018, 33, 1347–1357. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ma, C.; Zhang, X. Efficiency and optimal loads analysis for multiple-receiver wireless power transfer systems. IEEE Trans. Microw. Theory Tech. 2015, 63, 801–812. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Jin, N.; Tang, H. Analysis and design of a wireless power transfer system with dual active bridges. Energies 2017, 10, 1588. [Google Scholar] [CrossRef]
- Sanborn, G.; Phipps, A. Standards and methods of power control for variable power bidirectional wireless power transfer. In Proceedings of the 2017 IEEE Wireless Power Transfer Conference (WPTC), Taipei, Taiwan, 10–12 May 2017. [Google Scholar]
- Sha, D.; Wang, X.; Xu, Y. Unequal PWM control for a current-fed DC-DC converter for battery application. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 3373–3377. [Google Scholar]
- Kazimierczuk, M.K. Boost PWM DC-DC converter. In Pulse-Width Modulated DC-DC Power Converters, 2nd ed.; John Wiley & Sons, Wright State University: Dayton, OH, USA, 2017; Chapter 3; pp. 85–137. [Google Scholar]
- Mai, R.; Liu, Y.; Li, Y.; Yue, P.; Cao, G.; He, Z. An active rectifier based maximum efficiency tracking method using an additional measurement coil for wireless power transfer. IEEE Trans. Power Electron. 2018, 33, 716–728. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Tang, H. Analysis of efficiency improvement in wireless power transfer system. IET Power Electron. 2018, 11, 302–309. [Google Scholar] [CrossRef]
- Yang, E.X.; Lee, F.C.; Jovanovic, M.M. Small-signal modeling of series and parallel resonant converters. In Proceedings of the 1992 Applied Power Electronics Conference and Exposition (APEC), Boston, MA, USA, 23–27 February 1992; pp. 785–792. [Google Scholar]
- Zhang, Y.; Chen, K.; He, F.; Zhao, Z.; Lu, T.; Yuan, L. Closed-form oriented modeling and analysis of wireless power transfer system with constant-voltage source and load. IEEE Trans. Power Electron. 2016, 31, 3472–3481. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Load R | 52 Ω | Input voltage EV | 24 V |
| Transmitting switching frequency fs | 85 kHz | Mutual inductance M | 18 μH |
| Transmitting inductance Lp | 15.5 μH | Transmitting inner resistance rp | 8 mΩ |
| Receiving inductance Ls | 274.7 μH | Receiving inner resistance rs | 0.3 Ω |
| Compensation inductance La | 15.5 μH | Compensation inner resistance rLa | 0.04 Ω |
| DC inductance L1 & L2 | 51 μH | DC inner resistance rL | 0.2 Ω |
| Transmitting capacitance Cp | 222 nF | Receiving capacitance Cs | 12.8 nF |
| Clamp capacitance Co | 470 μF | Transmitting duty ratio dS | 0.7 |
| Forward voltage drop of diode VF | 0.6 V | On resistance of MOSFET Ron | 80 mΩ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Liu, X.; Jin, N.; Tang, H.; Yang, X.; Ali, M. Wireless Power Transfer for Battery Powering System. Electronics 2018, 7, 178. https://doi.org/10.3390/electronics7090178
Wang T, Liu X, Jin N, Tang H, Yang X, Ali M. Wireless Power Transfer for Battery Powering System. Electronics. 2018; 7(9):178. https://doi.org/10.3390/electronics7090178
Chicago/Turabian StyleWang, Tianfeng, Xin Liu, Nan Jin, Houjun Tang, Xijun Yang, and Muhammad Ali. 2018. "Wireless Power Transfer for Battery Powering System" Electronics 7, no. 9: 178. https://doi.org/10.3390/electronics7090178
APA StyleWang, T., Liu, X., Jin, N., Tang, H., Yang, X., & Ali, M. (2018). Wireless Power Transfer for Battery Powering System. Electronics, 7(9), 178. https://doi.org/10.3390/electronics7090178