Unmanned Aerial Vehicle Recognition Based on Clustering by Fast Search and Find of Density Peaks (CFSFDP) with Polarimetric Decomposition


Abstract
1. Introduction
- Better performance under conditions of different SNRs in contrast with other algorithms;
- Extraction of the local geometrical structure of UAVs based on polarimetric decomposition.
2. Imaging Algorithm
2.1. Polarimetric Matrix and the Signal Model of Radar Imaging
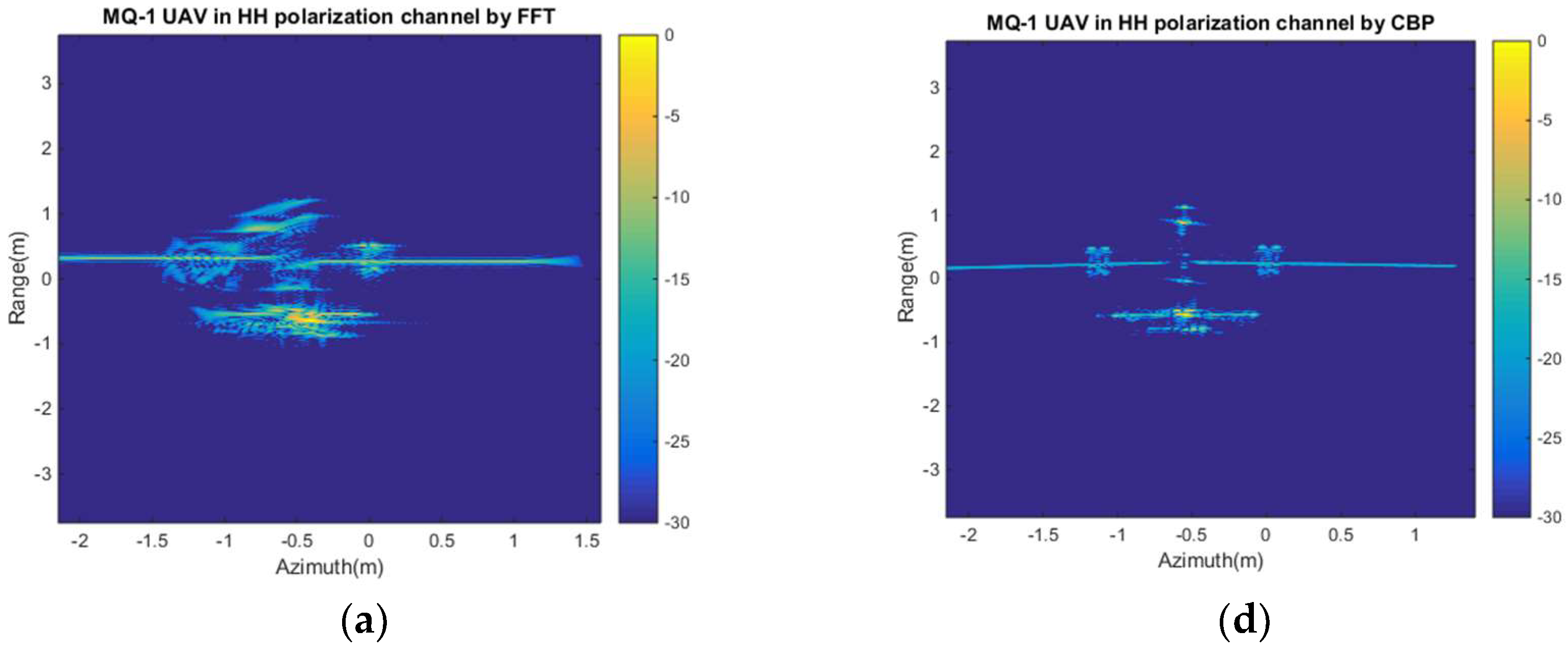
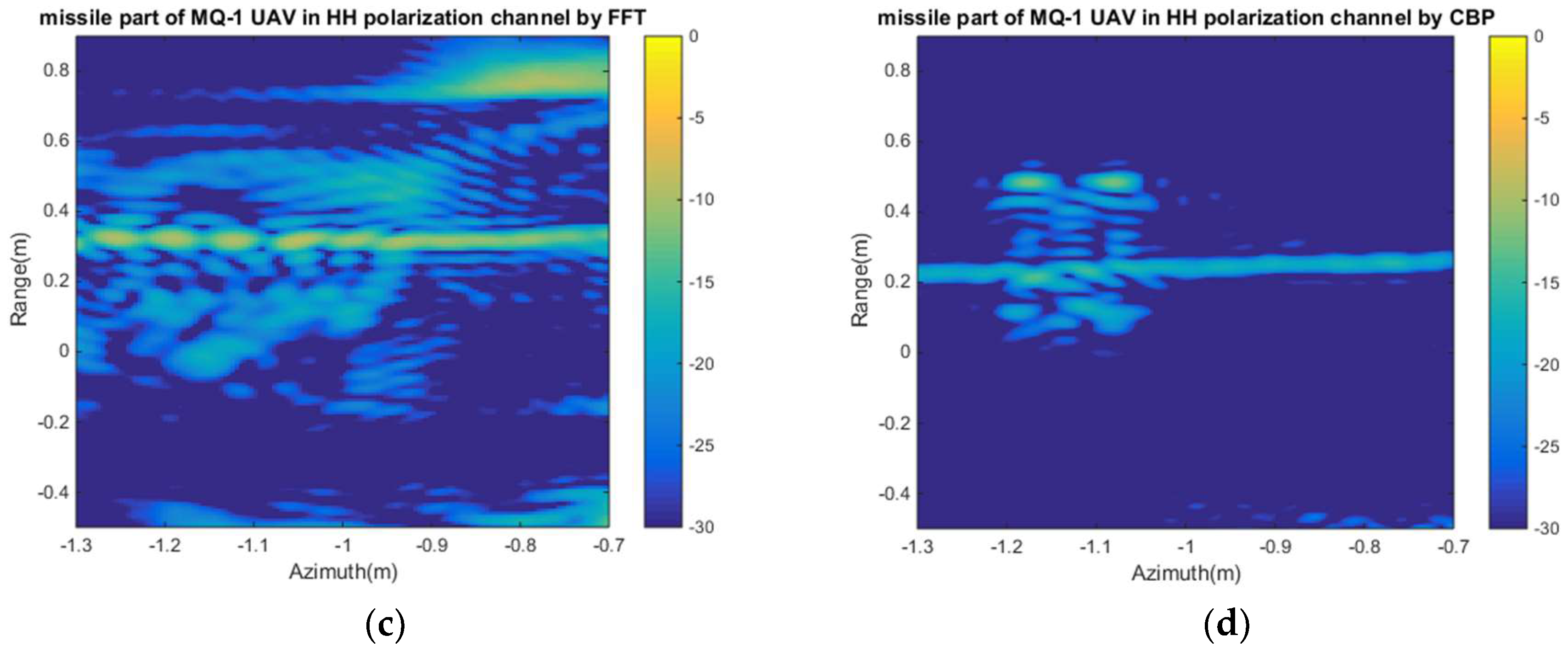
2.2. 2D Fourier Transform Algorithm
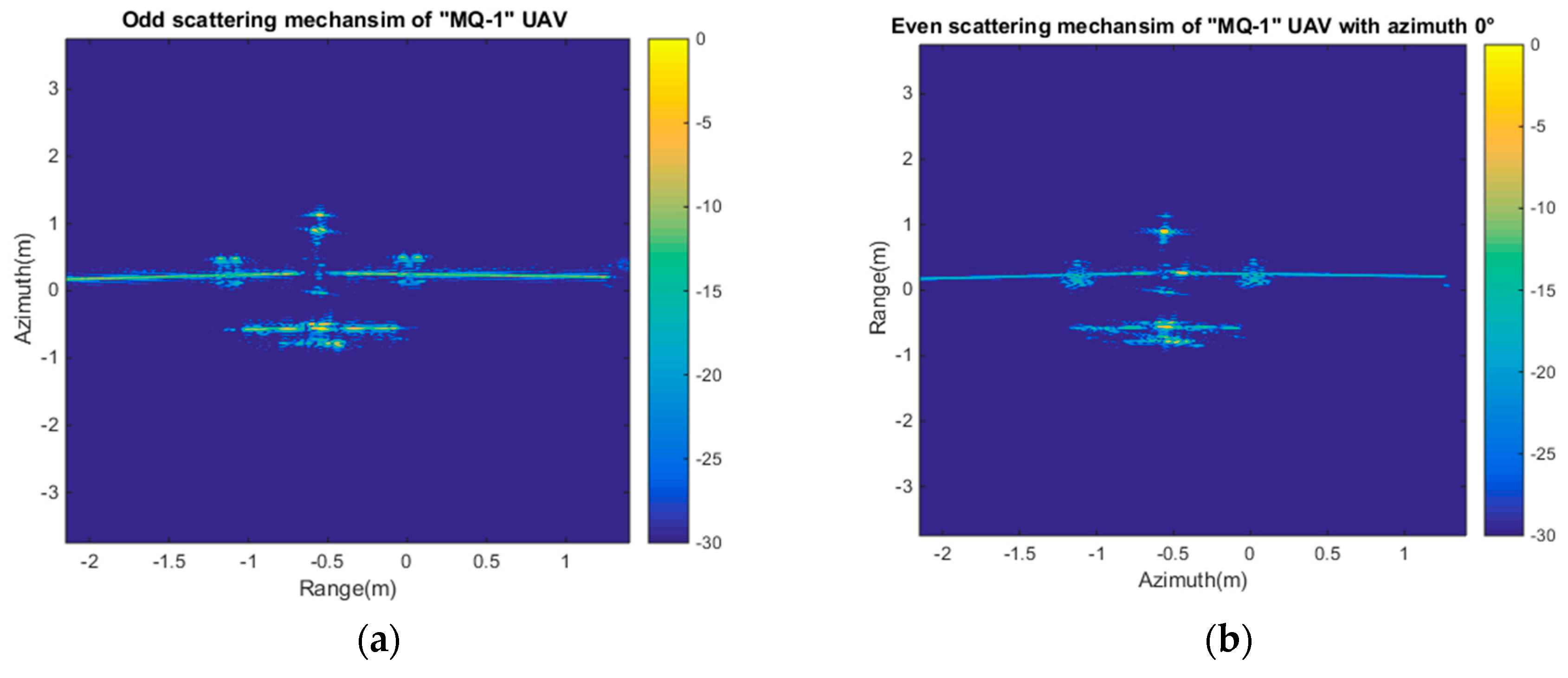
3. Polarimetric Decomposition Methods
3.1. Pauli Decomposition
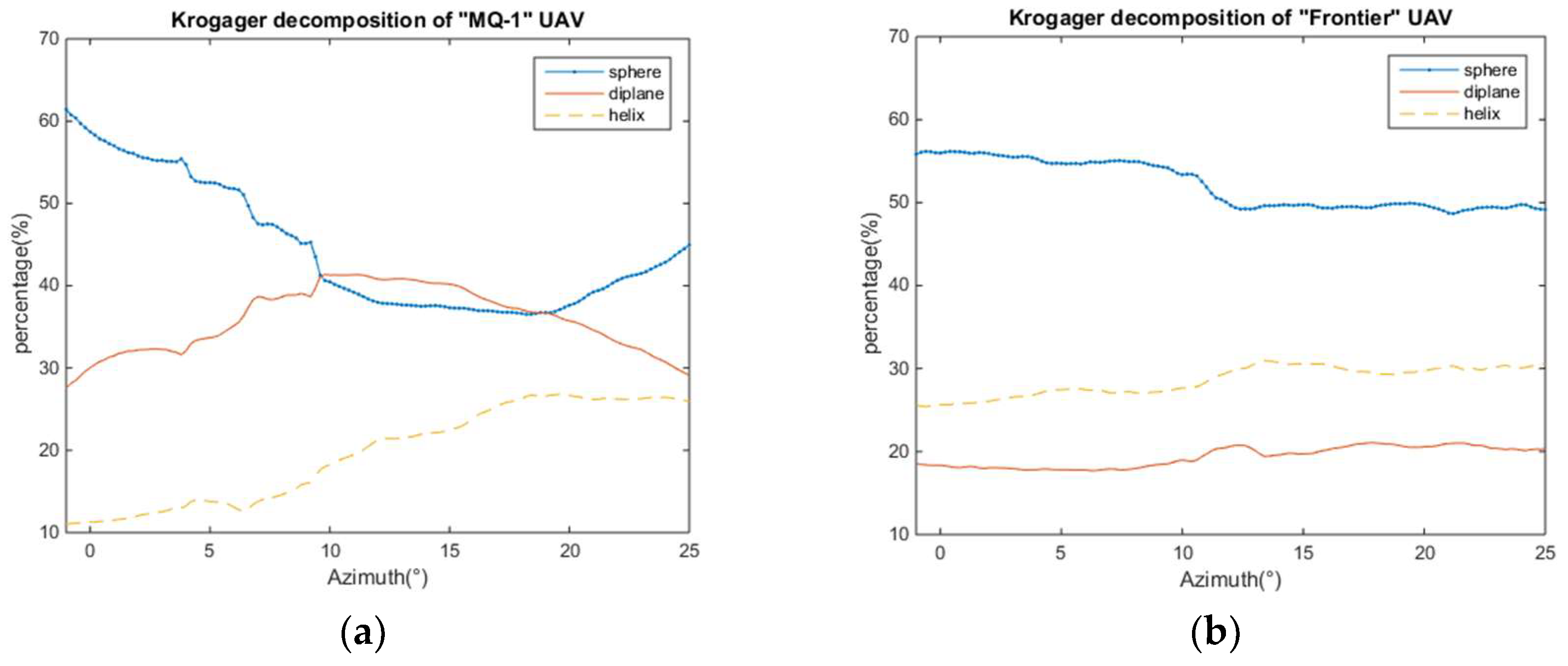
3.2. Krogager Decomposition
3.3. Cameron Decomposition
4. Clustering by Fast Search and Find of Density Peaks (CFSFDP)
5. The Flowchart of the Proposed Algorithm
6. Experiments and Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Lee, J.S.; Jurkevich, L.; Dewaele, P.; Oosterlinck, A. Speckle filtering of synthetic aperture radar images: A review. Remote Sens. Rev. 1994, 8, 255–267. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to radar. In Radar Handbook, 3rd ed.; Mc Graw Hill: New York, NY, USA, 2008; pp. 2–6. [Google Scholar]
- Zhao, Q.; Principe, J.C. Support vector machines for SAR automatic target recognition. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 643–654. [Google Scholar] [CrossRef]
- Jacobs, S.P.; Sullivan, J.A.O. Automatic target recognition using sequences of high resolution radar range-profiles. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 364–381. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Z.; Todorovic, S.; Li, J. Adaptive boosting for SAR automatic target recognition. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 112–125. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Xu, X. Principles and applications of coherent random noise radar technology. Proc. SPIE Int. Soc. Opt. Eng. 2003, 5113, 503–514. [Google Scholar]
- Novak, L.M. Performance of a high-resolution polarimetric SAR automatic target recognition system. Linc. Lab. J. 1993, 6, 11–24. [Google Scholar]
- Ainsworth, T.L.; Schuler, D.L.; Lee, J.S. Polarimetric SAR characterization of man-made structures in urban areas using normalized circular-pol correlation coefficients. Remote Sens. Environ. 2008, 112, 2876–2885. [Google Scholar] [CrossRef]
- Dungan, K.E.; Potter, L.C. 3D imaging of vehicles using wide aperture radar. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 187–200. [Google Scholar] [CrossRef]
- Saville, M.A.; Saini, D.K.; Smith, J. Commercial vehicle classification from spectrum parted linked image test-attributed synthetic aperture radar imagery. IET Radar Sonar Navig. 2016, 10, 569–576. [Google Scholar] [CrossRef]
- Fuller, D.F.; Saville, M.A. A high-frequency multipeak model for wide-angle SAR imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4279–4291. [Google Scholar] [CrossRef]
- He, Y.; He, S.Y.; Zhang, Y.H.; Wen, G.J.; Yu, D.F.; Zhu, G.Q. A forward approach to establish parametric scattering center models for known complex radar targets applied to SAR ATR. IEEE Trans. Antennas Propag. 2014, 62, 6192–6205. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, Z.; Fu, Q. Three-dimensional scattering center extraction based on wide aperture data at a single elevation. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1638–1655. [Google Scholar] [CrossRef]
- Yun, D.J.; Lee, J.I.; Bae, K.U.; Yoo, J.H.; Kwon, K.I.; Myung, N.H. Improvement in Computation Time of 3D Scattering Center Extraction Using the Shooting and Bouncing Ray Technique. IEEE Trans. Antennas Propag. 2017, 65, 4191–4199. [Google Scholar] [CrossRef]
- Li, Y.; Jin, Y.Q. Imaging and structural feature decomposition of a complex target using multi-aspect polarimetric scattering. Sci. China Inf. Sci. 2016, 59, 082308. [Google Scholar] [CrossRef]
- Potter, L.C.; Moses, R.L. Attributed scattering centers for SAR ATR. IEEE Trans. Image Process. 1997, 6, 79–91. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Chen, Y.; Dai, D.; Chen, S.; Wang, X. Clustering-based geometrical structure retrieval of man-made target in SAR images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 279–283. [Google Scholar] [CrossRef]
- Duan, J.; Zhang, L.; Xing, M.; Wu, Y.; Wu, M. Polarimetric target decomposition based on attributed scattering center model for synthetic aperture radar targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2095–2099. [Google Scholar] [CrossRef]
- Xing, M.; Jiang, X.; Wu, R.; Zhou, F.; Bao, Z. Motion compensation for UAV SAR based on raw radar data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2870–2883. [Google Scholar] [CrossRef]
- Jian, M.; Lu, Z.; Chen, V.C. Experimental study on radar micro-Doppler signatures of unmanned aerial vehicles. In Proceedings of the IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 0854–0857. [Google Scholar]
- Guay, R.; Drolet, G.; Bray, J.R. Measurement and modelling of the dynamic radar cross-section of an unmanned aerial vehicle. IET Radar Sonar Navig. 2017, 11, 1155–1160. [Google Scholar] [CrossRef]
- Harman, S. Analysis of the radar return of micro-UAVs in flight. In Proceedings of the IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 1159–1164. [Google Scholar]
- Pieraccini, M.; Rojhani, N.; Miccinesi, L. 2D and 3D-ISAR Images of a Small Quadcopter. In Proceedings of the IEEE European Radar Conference, London, UK, 3–7 October 2017; pp. 307–310. [Google Scholar]
- Gorham, L.A.; Moore, L.J. SAR image formation toolbox for MATLAB. In Proceedings of Volume 7699, Algorithms for Synthetic Aperture Radar Imagery XVII, SPIE Defense, Security, and Sensing, Orlando, FL, USA, 5–9 April, 2010; SPIE: Bellingham, WA, USA, 2010; Volume 7699, p. 769906. [Google Scholar] [CrossRef]
- Chen, S.W. Polarimetric coherence pattern: A visualization and characterization tool for PolSAR data investigation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 286–297. [Google Scholar] [CrossRef]
- Dai, D.H. Study on Polarimetric Radar Imaging and Target Feature Extraction; National University of Defense Technology: Changsha, China, 2008; Volume 1, pp. 50–56. [Google Scholar]
- Munson, D.C.; O’brien, J.D.; Jenkins, W.K. A tomographic formulation of spotlight-mode synthetic aperture radar. Proc. IEEE 1983, 71, 917–925. [Google Scholar] [CrossRef]
- Krogager, E. New decomposition of the radar target scattering matrix. Electron. Lett. 1990, 26, 1525–1527. [Google Scholar] [CrossRef]
- Krogager, E.; Boerner, W.M.; Madsen, S.N. Feature-motivated Sinclair matrix (sphere/diplane/helix) decomposition and its application to target sorting for land feature classification. Int. Soc. Opt. Photonics 1997, 3120, 144–155. [Google Scholar]
- Cameron, W.L.; Leung, L.K. Feature motivated polarization scattering matrix decomposition. In Proceedings of the IEEE Radar Conference, Arlington, VA, USA, 7–10 May 1990; pp. 549–557. [Google Scholar]
- Cameron, W.L.; Youssef, N.N.; Leung, L.K. Simulated polarimetric signatures of primitive geometrical shapes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 793–803. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- PolSARpro. Available online: https://earth.esa.int/web/polsarpro/polarimetry-tutorial (accessed on 30 September 2018).
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef] [PubMed]
- CFSFDP in Science. Available online: http://science.sciencemag.org/content/344/6191/1492 (accessed on 30 September 2018).
- An Introduction to CFSFDP. Available online: https://blog.csdn.net/itplus/article/details/38926837 (accessed on 30 September 2018).
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Wu, X.; Kumar, V.; Quinlan, J.R.; Ghosh, J.; Yang, Q.; Motoda, H.; Zhou, Z.H. Top 10 algorithms in data mining. Knowl. Inf. Syst. 2008, 14, 1–37. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A k-means clustering algorithm. J. R. Stat. Soc. Ser. C (Appl. Stat.) 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Kaufman, L.; Rousseeuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley and Sons: Hoboken, NJ, USA, 2009; Volume 344. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Clustering by Fast Search and Find of Density Peaks (CFSFDP) |
| 1. Input: 2. Initialization: , 3. The computation of and (subscripts of in descending order). 4. For {; For {IF () {; ;} } } 5. ; 6. Computation of the cluster centers where represents the number of clustering centers 7. 8. For { IF {} } 9. Initialization: 10. The computation of thresholds of mean local density for cluster centers 11. Label cluster halos For { IF {} } end |
| Abbreviation | Target |
|---|---|
| T1 | “MQ-1” UAV with azimuth angle from −5 to 25° |
| T2 | “Frontier” UAV with azimuth angle from 0 to 30° |
| T3 | “Frontier” UAV with azimuth angle from 75 to 105° |
| 5 dB | 10 dB | 20 dB | 30 dB | 40 dB | |
|---|---|---|---|---|---|
| DBSCAN [38] | 33.33% | 66.67% | 83.66% | 83.66% | 83.66% |
| K-means [39,40] | 53.20% | 82.78% | 83.00% | 83.00% | 83.00% |
| K-medoids [41] | 76.16% | 82.78% | 83.00% | 83.00% | 83.00% |
| Proposed algorithm | 77.26% | 83.22% | 100.00% | 100.00% | 100.00% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, H.; Pang, B.; Dai, D.; Wu, J.; Wang, X. Unmanned Aerial Vehicle Recognition Based on Clustering by Fast Search and Find of Density Peaks (CFSFDP) with Polarimetric Decomposition. Electronics 2018, 7, 364. https://doi.org/10.3390/electronics7120364
Wu H, Pang B, Dai D, Wu J, Wang X. Unmanned Aerial Vehicle Recognition Based on Clustering by Fast Search and Find of Density Peaks (CFSFDP) with Polarimetric Decomposition. Electronics. 2018; 7(12):364. https://doi.org/10.3390/electronics7120364
Chicago/Turabian StyleWu, Hao, Bo Pang, Dahai Dai, Jiani Wu, and Xuesong Wang. 2018. "Unmanned Aerial Vehicle Recognition Based on Clustering by Fast Search and Find of Density Peaks (CFSFDP) with Polarimetric Decomposition" Electronics 7, no. 12: 364. https://doi.org/10.3390/electronics7120364
APA StyleWu, H., Pang, B., Dai, D., Wu, J., & Wang, X. (2018). Unmanned Aerial Vehicle Recognition Based on Clustering by Fast Search and Find of Density Peaks (CFSFDP) with Polarimetric Decomposition. Electronics, 7(12), 364. https://doi.org/10.3390/electronics7120364