Coordination of Congestion and Awareness Control in Vehicular Networks



Abstract
1. Introduction
- Constrained evolution. With the integration methodology, the evolution of a system or standard will be constrained, and possibly limited by the adopted integrated solution. This is the case because any evolution of the interacting protocols would require a revision of the design of the integrated solution.
- Tailored designs. Different integrated solutions will be needed based on the protocols that are being integrated. The integration of different protocols requires different designs that are specific for the protocols to be integrated [14].
- Limited modularity. The integration methodology does not fully preserve the modularity of the layered protocol stack. Interacting protocols are integrated in a novel solution that does not follow modular design guidelines. Enabling cross-layer interactions while preserving modularity is a challenge still to be solved [15,16].
- COMPASS solves conflicts between protocols that operate independently over the same communication parameters. Such conflicts can occur, for example, when two different protocols request contradictory changes to a given transmission parameter.
- COMPASS can solve these conflicts by coordinating the operation of different protocols operating over the same communication parameters. Such coordination does not require the integration of these protocols or their re-design, which facilitates the future evolution of vehicular networks and the coexistence with legacy solutions.
- COMPASS is not restricted to a set or number of protocols. COMPASS can coordinate the operation of a varying number of protocols (acting over the same communication parameters), and this number can change over time. This again increases the impact of COMPASS and the future evolution of vehicular networks.
- COMPASS can achieve similar performance levels to that achieved by integrating the conflicting protocols, with the added benefits of an easier evolution of vehicular networks and the coexistence with legacy solutions.
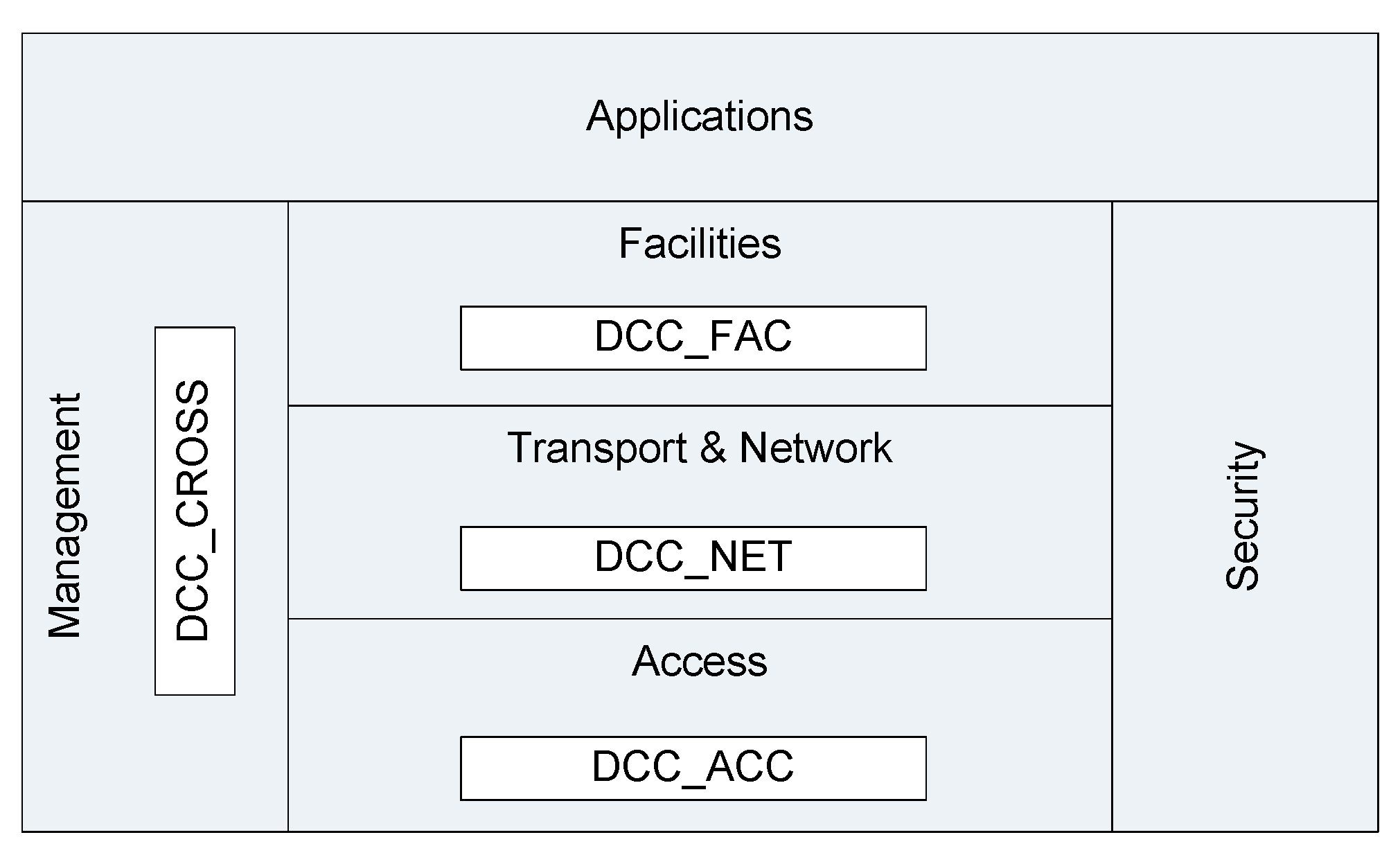
- COMPASS has been designed so that it can be easily integrated into the transversal Management layers of the ITS communications architecture defined by different standardization organizations such as ETSI or ISO.
- COMPASS has a very low computational complexity which facilitates its real-world implementation and possible impact on standardization.
2. Congestion and Awareness Control
2.1. Congestion Control
2.2. Awareness Control
2.3. Integration of Congestion and Awareness Control
3. Methodology for Cross-Layer Coordination
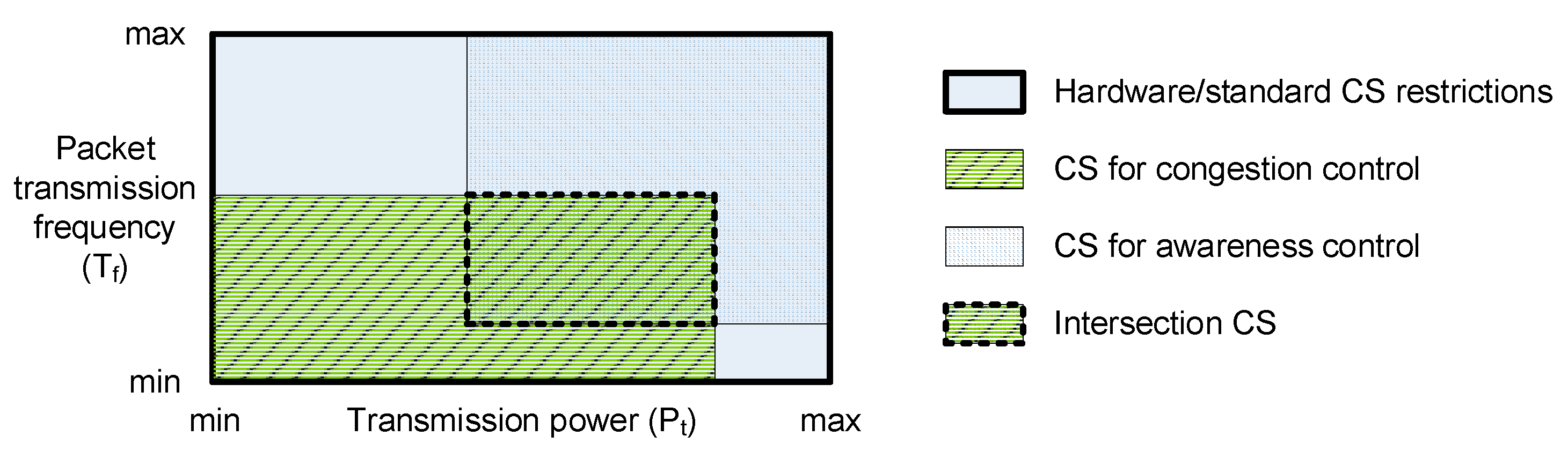
- Each protocol operates independently, calculates its own CS, and reports it to COMPASS.
- COMPASS calculates the Intersection CS based on the received CSs for each protocol.
- COMPASS configures the communication parameters to be compliant with the identified ICS. Different criteria could then be applied to select the communication parameters within the identified ICS.
| Algorithm 1. Derive own ICS |
| for each protocol j and parameter k |
| of the ICS for the vehicle executing COMPASS for each parameter k |
| = ∞ for 1 ≤ k ≤ C |
| 2. For each protocol coordinated j (1 ≤ j ≤ P) do |
| 3. For each communication parameter k (1 ≤ k ≤ C) do |
| 4. if for protocol j do |
| 5. reported for protocol j |
| 6. End If |
| 7. if for protocol j do |
| 8. for protocol j |
| 9. End If |
| 10. End For |
| 11. End For |
| Algorithm 2. Update communication parameters of the ego vehicle executing COMPASS |
| for each neighbor |
| for each communication parameter k |
| for 1 ≤ k ≤ C and Inc_flag = true |
| 2. For each communication parameter k (1 ≤ k ≤ C) do |
| 3. For each 1-hop neighbor i (1 ≤ i ≤ N) do |
| 4. |
| 5. End For |
| 6. |
| 7. if of ego vehicle executing COMPASS |
| 8. Inc_flag = false |
| 9. End if |
| 10. End for |
| 11. For each communication parameter k (1 ≤ k ≤ C) do |
| 12. If Inc_flag is true do |
| 13. If do |
| 14. for ego vehicle |
| 15. Else if do |
| 16. for ego vehicle |
| 17. End If |
| 18. Else |
| 19. if do |
| 20. for ego vehicle |
| 21. Else if do |
| 22. for ego vehicle |
| 23. End If |
| 24. End For |
4. Evaluation
4.1. Scenario and Simulation Settings
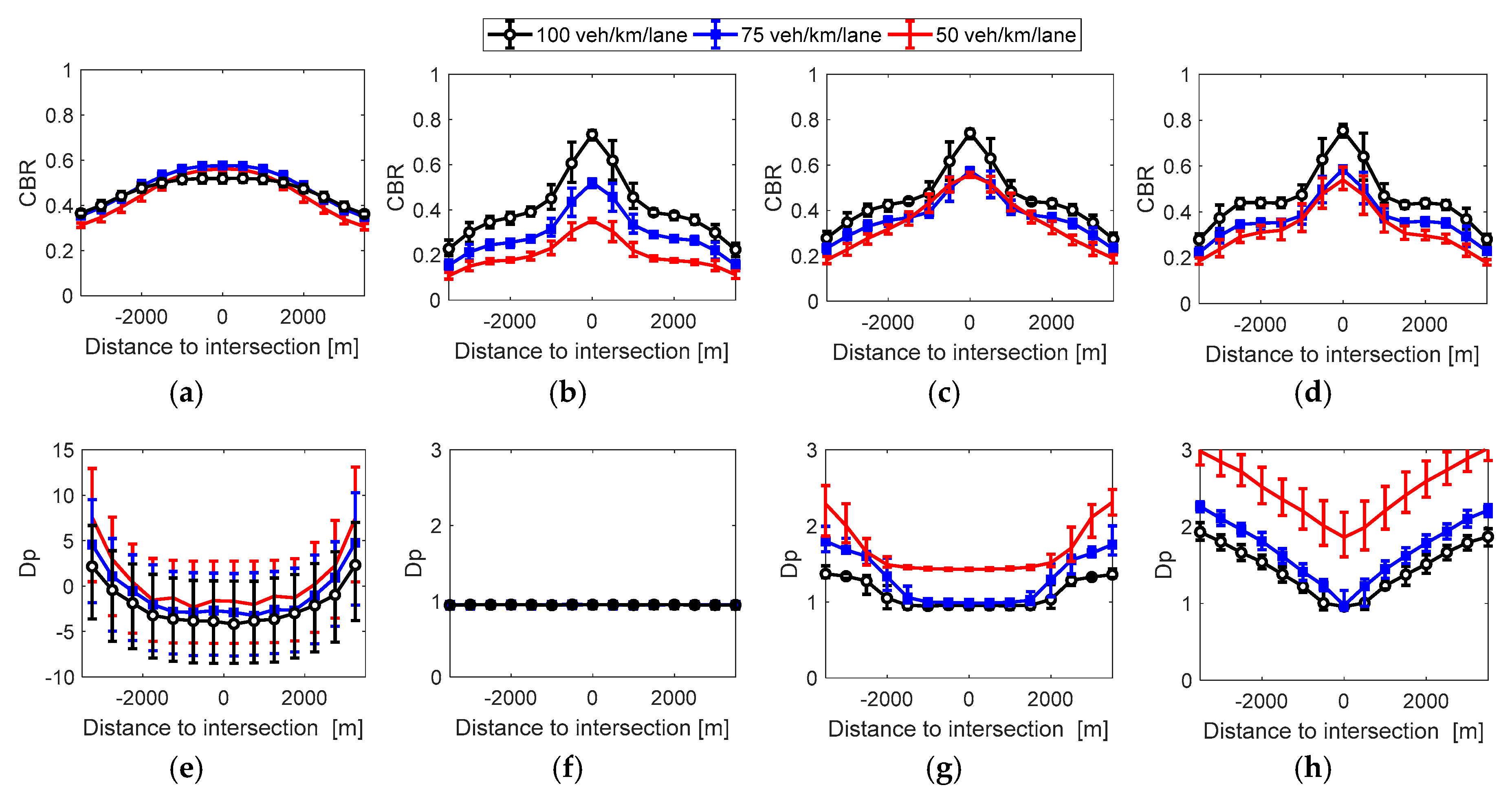
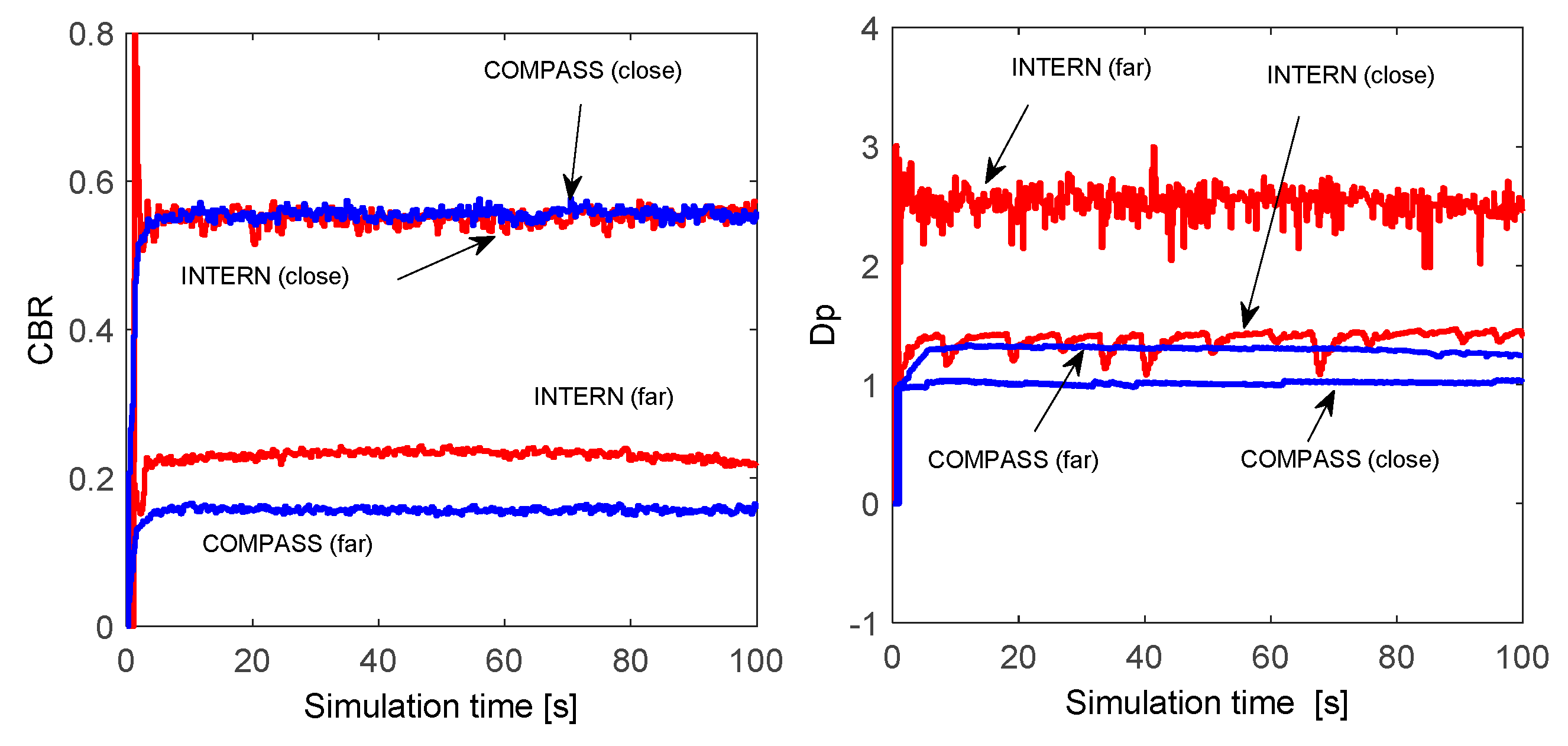
4.2. Congestion and Awareness Control
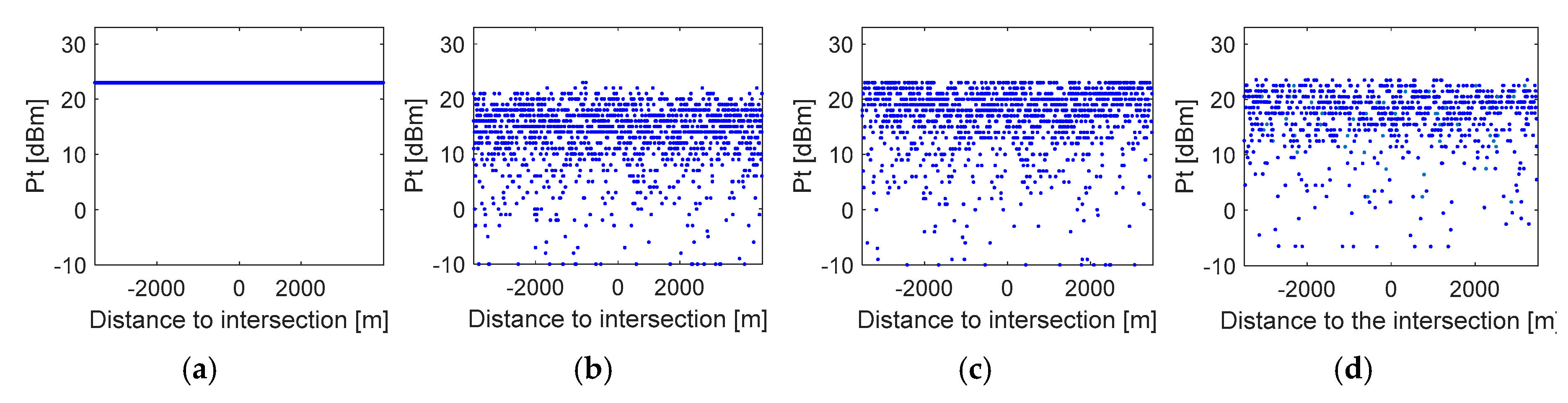
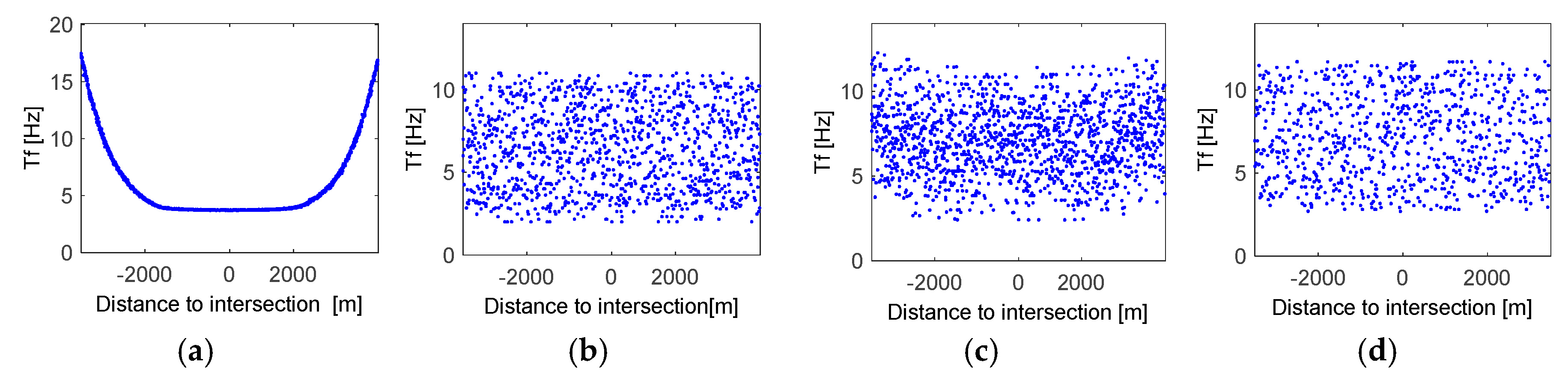
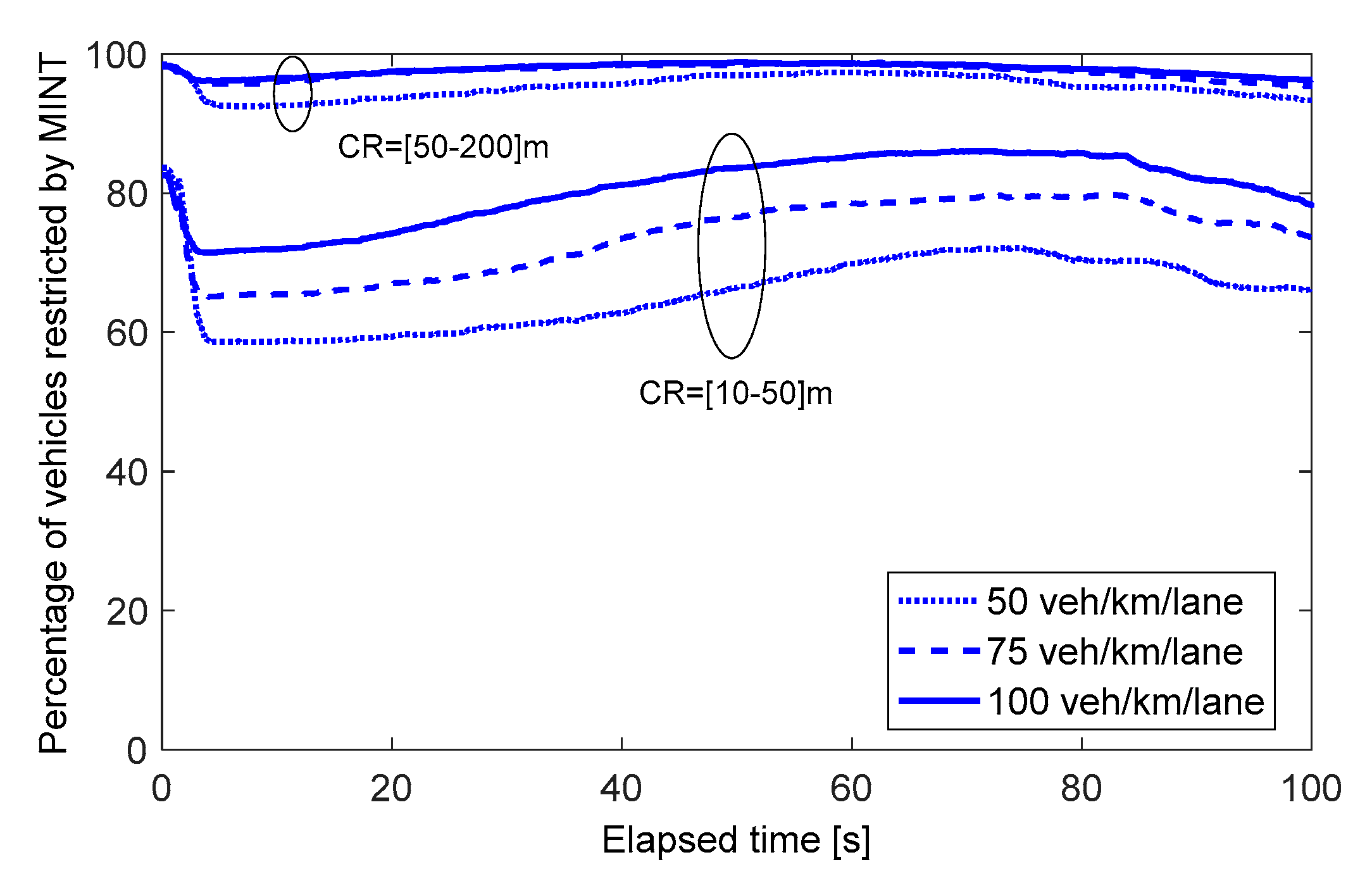
4.3. Congestion, Awareness and Topology Control
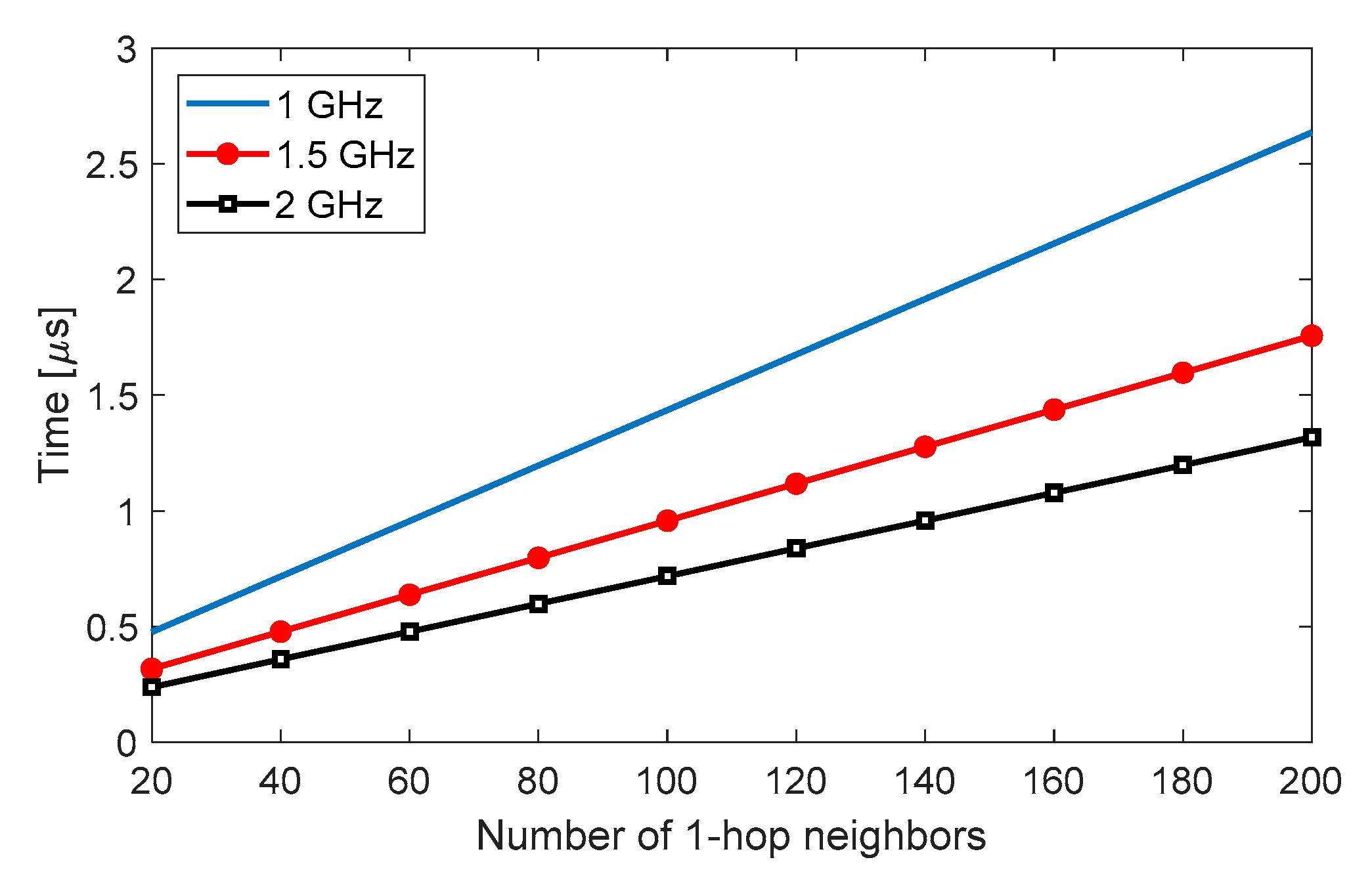
4.4. Computational Cost
5. Discussion
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Naik, G.; Liu, J.; Park, J.J. Coexistence of Wireless Technologies in the 5 GHz Bands: A Survey of Existing Solutions and a Roadmap for Future Research. IEEE Commun. Surv. Tutor. 2018, 20, 1777–1798. [Google Scholar] [CrossRef]
- Basheer, H.S.; Bassil, C. A review of broadcasting safety data in V2V: Weaknesses and requirements. Ad Hoc Netw. 2017, 65, 13–25. [Google Scholar] [CrossRef]
- Jabbarpour, M.R.; Noor, R.M.; Khokhar, R.H.; Ke, C.-H. Cross-layer congestion control model for urban vehicular environments. J. Netw. Comput. Appl. 2014, 44, 1–16. [Google Scholar] [CrossRef]
- Intelligent Transport Systems (ITS). Communications Architecture; ETSI EN 302 665 V1.1.1. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/302665/01.01.01_60/en_302665v010101p.pdf (accessed on 25 October 2018).
- Intelligent Transport Systems (ITS). Cross Layer DCC Management Entity for Operation in the ITS G5A and ITS G5B Medium; ETSI TS 103 175 V1.1.1. Available online: https://www.etsi.org/deliver/etsi_ts/103100_103199/103175/01.01.01_60/ts_103175v010101p.pdf (accessed on 25 October 2018).
- Intelligent Transport Systems (ITS). Decentralized Congestion Control Mechanisms for Intelligent Transport Systems Operating in the 5 GHz Range; Access Layer Part; ETSI TS 102 687 V1.1.1. Available online: https://www.etsi.org/deliver/etsi_ts/102600_102699/102687/01.01.01_60/ts_102687v010101p.pdf (accessed on 25 October 2018).
- Intelligent Transport Systems (ITS). GeoNetworking; Part 4: Geographical Addressing and Forwarding for Point-to-Point and Point-to-Multipoint Communications; Sub-Part 2: Media-Dependent Functionalities for ITS-G5; ETSI TS 102 636-4-2 V1.1.1. Available online: https://www.etsi.org/deliver/etsi_ts/102600_102699/1026360402/01.01.01_60/ts_1026360402v010101p.pdf (accessed on 25 October 2018).
- Intelligent Transport Systems (ITS). Facilities Layer; Communication Congestion Control; ETSI TS 103 141 V0.0.9. Available online: https://portal.etsi.org/webapp/workProgram/Report_WorkItem.asp?wki_id=37124 (accessed on 25 October 2018).
- Sepulcre, M.; Mittag, J.; Santi, P.; Hartenstein, H.; Gozalvez, J. Congestion and Awareness Control in Cooperative Vehicular Systems. Proc. IEEE 2011, 99, 1260–1279. [Google Scholar] [CrossRef]
- Gozalvez, J.; Sepulcre, M. Opportunistic technique for efficient wireless vehicular communications. IEEE Veh. Technol. Mag. 2007, 2, 33–39. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J.; Harri, J.; Hartenstein, H. Application-Based Congestion Control Policy for the Communication Channel in VANETs. IEEE Commun. Lett. 2010, 14, 951–953. [Google Scholar] [CrossRef]
- Giang, A.T.; Lambert, A.; Busson, A.; Gruyer, D. Topology control in VANET and capacity estimation. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Boston, MA, USA, 16–18 December 2013; pp. 135–142. [Google Scholar]
- Srivastava, V.; Motani, M. Cross-layer design: A survey and the road ahead. IEEE Commun. Mag. 2005, 43, 112–119. [Google Scholar] [CrossRef]
- Fu, B.; Xiao, Y.; Deng, H.J.; Zeng, H. A Survey of Cross-Layer Designs in Wireless Networks. IEEE Commun. Surv. Tutor. 2014, 16, 110–126. [Google Scholar] [CrossRef]
- Edirisinghe, R.; Zaslavsky, A. Cross-Layer Contextual Interactions in Wireless Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1114–1134. [Google Scholar] [CrossRef]
- Babber, K.; Randhawa, R. Cross-Layer Designs in Wireless Sensor Networks. In Computational Intelligence in Sensor Networks; Mishra, B., Dehuri, S., Panigrahi, B., Nayak, A., Das, H., Eds.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2012; Volume 776. [Google Scholar]
- Williams, B. The CALM Handbook; ISO TC204, v1.2; George Ronald Publisher: Herts, UK, September 2004. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Intelligent Transport Systems (ITS). Cross Layer DCC Management Entity for Operation in the ITS G5A and ITS G5B Medium; Validation Set-Up and Results; ETSI TR 101 613 V1.1.1. Available online: https://www.etsi.org/deliver/etsi_tr/101600_101699/101613/01.01.01_60/tr_101613v010101p.pdf (accessed on 25 October 2018).
- Rostami, A.; Cheng, B.; Bansal, G.; Sjöberg, K.; Gruteser, M.; Kenney, J.B. Stability Challenges and Enhancements for Vehicular Channel Congestion Control Approaches. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2935–2948. [Google Scholar] [CrossRef]
- Bansal, G.; Kenney, J.B.; Rohrs, C.E. LIMERIC: A Linear Adaptive Message Rate Algorithm for DSRC Congestion Control. IEEE Trans. Veh. Technol. 2013, 62, 4182–4197. [Google Scholar] [CrossRef]
- Bansal, G.; Kenney, J.B. Controlling Congestion in Safety-Message Transmissions: A Philosophy for Vehicular DSRC Systems. IEEE Veh. Technol. Mag. 2013, 8, 20–26. [Google Scholar] [CrossRef]
- Tielert, T.; Jiang, D.; Chen, Q.; Delgrossi, L.; Hartenstein, H. Design Methodology and Evaluation of Rate Adaptation Based Congestion Control for Vehicle Safety Communications. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Amsterdam, The Netherlands, 14–16 November 2011. [Google Scholar]
- An, N.; Maile, M.; Jiang, D.; Mittag, J.; Hartenstein, H. Balancing the Requirements for a Zero False Positive/Negative Forward Collision Warning. In Proceedings of the Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Banff, AB, Canada, 18–20 March 2013; pp. 191–195. [Google Scholar]
- Tielert, T.; Jiang, D.; Hartenstein, H.; Delgrossi, L. Joint power/rate congestion control optimizing packet reception in vehicle safety communications. In Proceedings of the ACM International Workshop on VehiculAr InterNETworking (VANET), Taipei, Taiwan, 25 June 2013; pp. 51–60. [Google Scholar]
- Killat, M.; Hartenstein, H. An empirical model for probability of packet reception in vehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2009. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J.; Altintas, O.; Kremo, H. Integration of congestion and awareness control in vehicular networks. Ad Hoc Netw. 2016, 37 Pt 1, 29–43. [Google Scholar] [CrossRef]
- Zhang, L.; Valaee, S. Congestion Control for Vehicular Networks with Safety-Awareness. IEEE/ACM Trans. Netw. 2016, 24, 3290–3299. [Google Scholar] [CrossRef]
- Frigau, M.S. Fair Decentralized Congestion and Awareness Control for Vehicular Networks. In Proceedings of the IEEE 21st International Conference on Parallel and Distributed Systems (ICPADS), Melbourne, Australia, 14–17 December 2015; pp. 172–180. [Google Scholar]
- Intel. Intel® 64 and IA-32 Architectures Optimization Reference Manual; Order Number: 248966-033; Intel: Santa Clara, CA, USA, June 2016. [Google Scholar]
- Sepulcre, M.; Gozalvez, J.; Coll-Perales, B. Why 6Mbps is not (always) the Optimum Data Rate for Beaconing in Vehicular Networks. IEEE Trans. Mob. Comput. 2017, 16, 3568–3579. [Google Scholar] [CrossRef]
- Sepulcre, M.; Tercero, P.; Gozalvez, J. Can Beacons be Compressed to Reduce the Channel Load in Vehicular Networks? In Proceedings of the IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018. [Google Scholar]
- Ahlswede, R.; Cai, N.; Li, S.; Yeung, R. Network information flow. IEEE Trans. Inf. Theory 2000, 46, 1204–1216. [Google Scholar] [CrossRef]
- Mittag, J.; Thomas, F.; Harri, J.; Hartenstein, H. A comparison of single- and multi-hop beaconing in VANETs. In Proceedings of the ACM International Workshop on Vehicular InterNETworking (VANET), Beijing, China, 25 September 2009; pp. 69–78. [Google Scholar]
- Noor-A-Rahim, M.; Ali, G.G.M.N.; Nguyen, H.; Guan, Y.L. Performance Analysis of IEEE 802.11p Safety Message Broadcast with and Without Relaying at Road Intersection. IEEE Access 2018, 6, 23786–23799. [Google Scholar] [CrossRef]
- Nguyen, H.; Noor-A-Rahim, M.; Liu, Z.; Jamaludin, D.; Guan, Y.L. A Semi-Empirical Performance Study of Two-Hop DSRC Message Relaying at Road Intersections. Information 2018, 9, 147. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J.; Gisbert, J.R. On the Potential of Network Coding for Cooperative Awareness in Vehicular Networks. In Proceedings of the IEEE International Workshop on Automotive IoT (IEEE Auto-IoT 2015), Milan, Italy, 14–16 December 2015. [Google Scholar]
- Ali, G.G.M.N.; Noor-A-Rahim, M.; Chong, P.H.J.; Guan, Y.L. Analysis and Improvement of Reliability Through Coding for Safety Message Broadcasting in Urban Vehicular Networks. IEEE Trans. Veh. Technol. 2018, 67, 6774–6787. [Google Scholar] [CrossRef]
- Kosch, T.; Adler, C.J.; Eichler, S.; Schroth, C.; Strassberger, M. The scalability problem of vehicular ad hoc networks and how to solve it. IEEE Wirel. Commun. 2006, 13, 22–28. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Packet size [Bytes] | 250 |
| Min. and Max. transmission power [dBm] | −10 and 23 |
| Min. and Max. packet tx frequency [Hz] | 1 and 20 |
| Min. and Max. ΔTf [Hz] | 1 and 3 |
| Data rate [Mbps] | 6 |
| Carrier sense threshold [dBm] | −90 |
| Reception threshold [dBm] | −82 |
| Target channel busy ratio (CBRmax) | 0.6 |
| CBR measurement period [ms] | 250 |
| Communication range required (CR) [m] | 50–200 |
| Packet reception frequency required (R) [Hz] | 1–10 |
| Traffic density [vehicles/km/lane] | 50, 75, 100 |
| Simulation time [s] and simulation runs | 150 and 10 |
| Algorithm Line | CPU Cycles | Repetitions |
|---|---|---|
| 1 | 1 | 2·C |
| 2 | 1 | 1 |
| 3 | 1 | P |
| 4 | 1 | P·C |
| 5 | 1 | P·C |
| 6 | 1 | P·C |
| 8 | 1 | P·C |
| 9 | 1 | P·C |
| Algorithm Line | CPU Cycles | Repetitions |
|---|---|---|
| 1 | 1 | C + 1 |
| 2 | 1 | C |
| 3 | 1 | C·N |
| 4 | 3 | C·N |
| 6 | 39 | C |
| 8 | 1 | C |
| 11 | 1 | C |
| 12 | 1 | C |
| 13 | 9 | C |
| 14 | 7 | C |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sepulcre, M.; Gozalvez, J. Coordination of Congestion and Awareness Control in Vehicular Networks. Electronics 2018, 7, 335. https://doi.org/10.3390/electronics7110335
Sepulcre M, Gozalvez J. Coordination of Congestion and Awareness Control in Vehicular Networks. Electronics. 2018; 7(11):335. https://doi.org/10.3390/electronics7110335
Chicago/Turabian StyleSepulcre, Miguel, and Javier Gozalvez. 2018. "Coordination of Congestion and Awareness Control in Vehicular Networks" Electronics 7, no. 11: 335. https://doi.org/10.3390/electronics7110335
APA StyleSepulcre, M., & Gozalvez, J. (2018). Coordination of Congestion and Awareness Control in Vehicular Networks. Electronics, 7(11), 335. https://doi.org/10.3390/electronics7110335