Ethical and Legal Dilemma of Autonomous Vehicles: Study on Driving Decision-Making Model under the Emergency Situations of Red Light-Running Behaviors

Abstract
1. Introduction
- In this specific scene, DDM under the emergency situation is subtly proposed, combined with ethical and legal analysis.
- Quantitative ethical and legal factors are represented by specific indicators under emergency situations of red light-running behaviors. The duration of red light (RL), the type of abnormal target (AT-T), the number of abnormal target (AT-N) and the state of abnormal target (AT-S) are chosen to represent the ethical and legal factors.
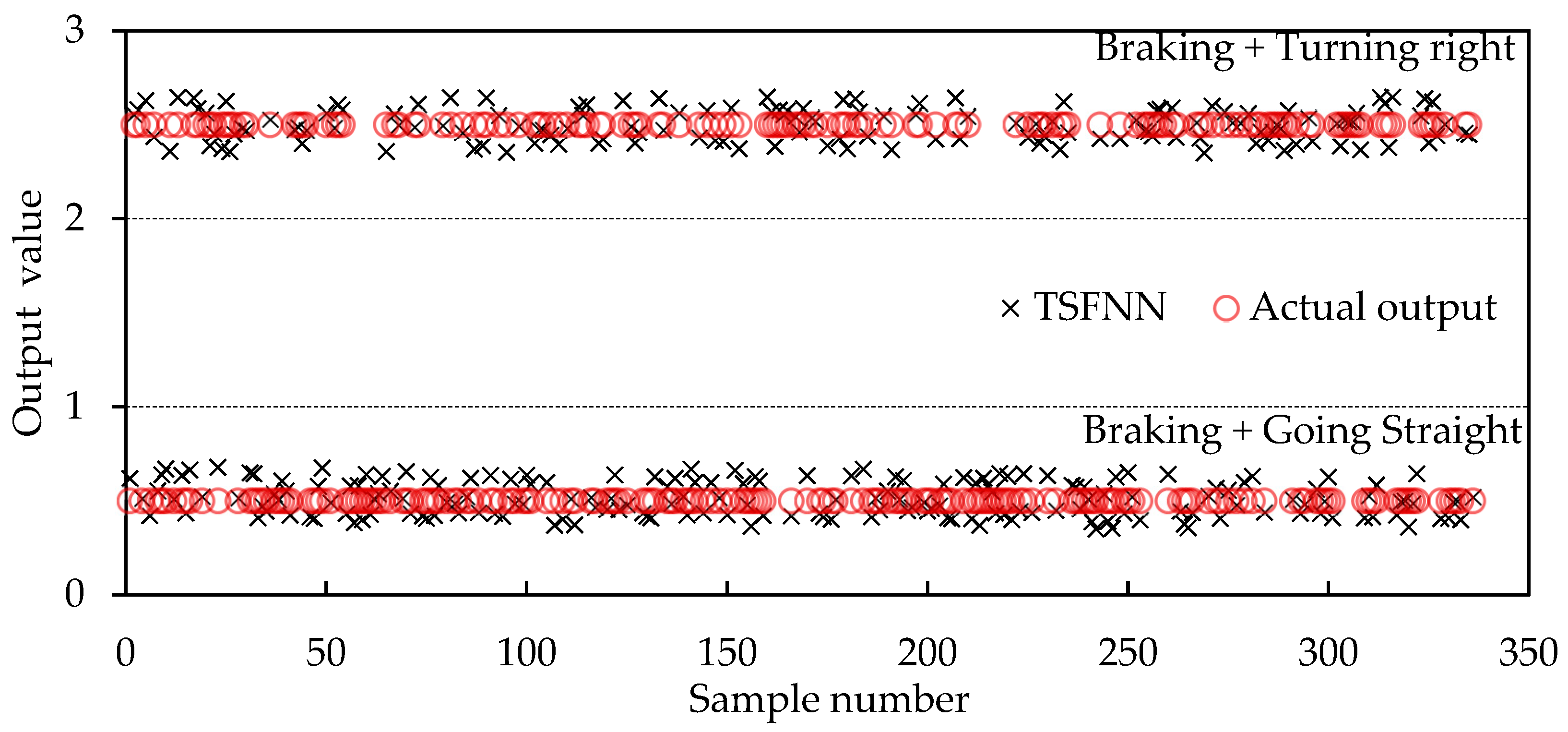
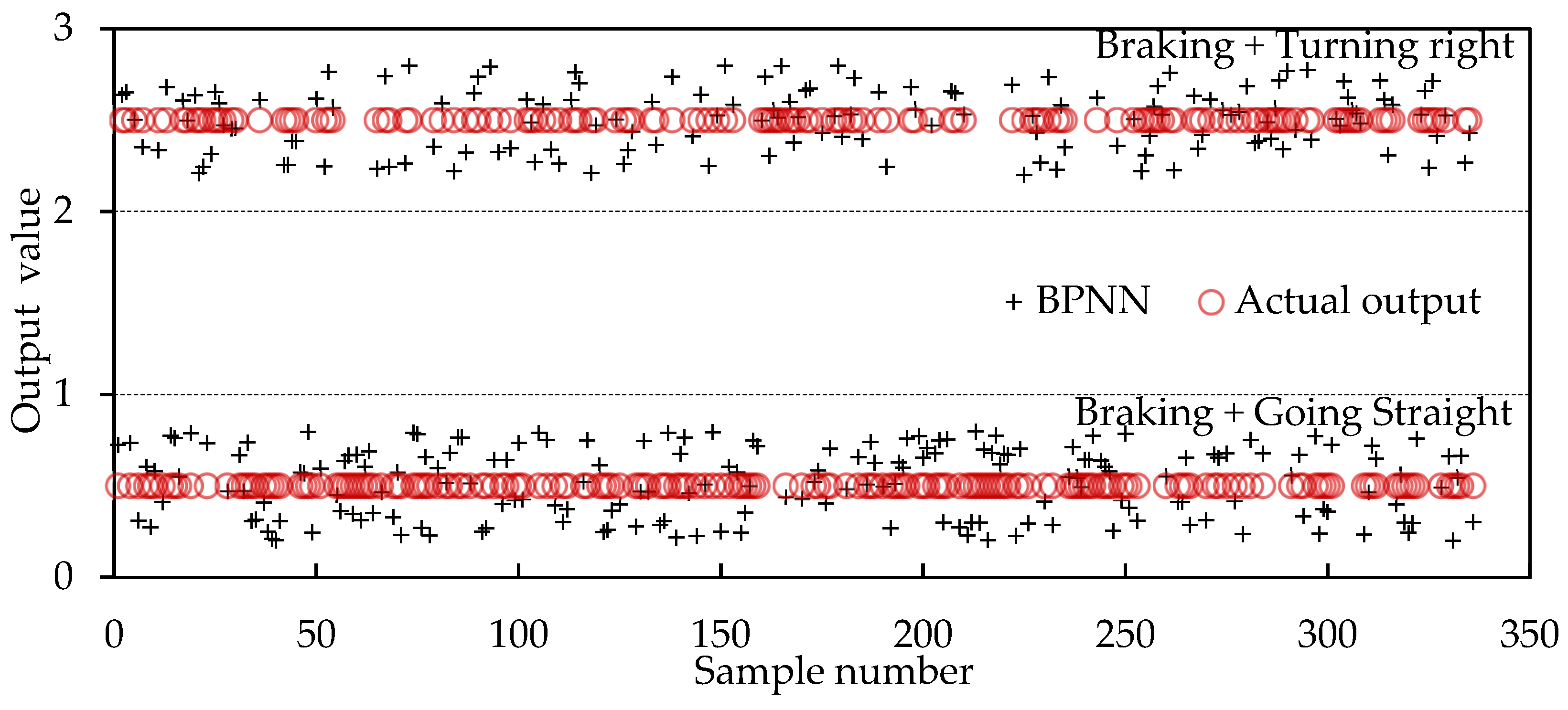
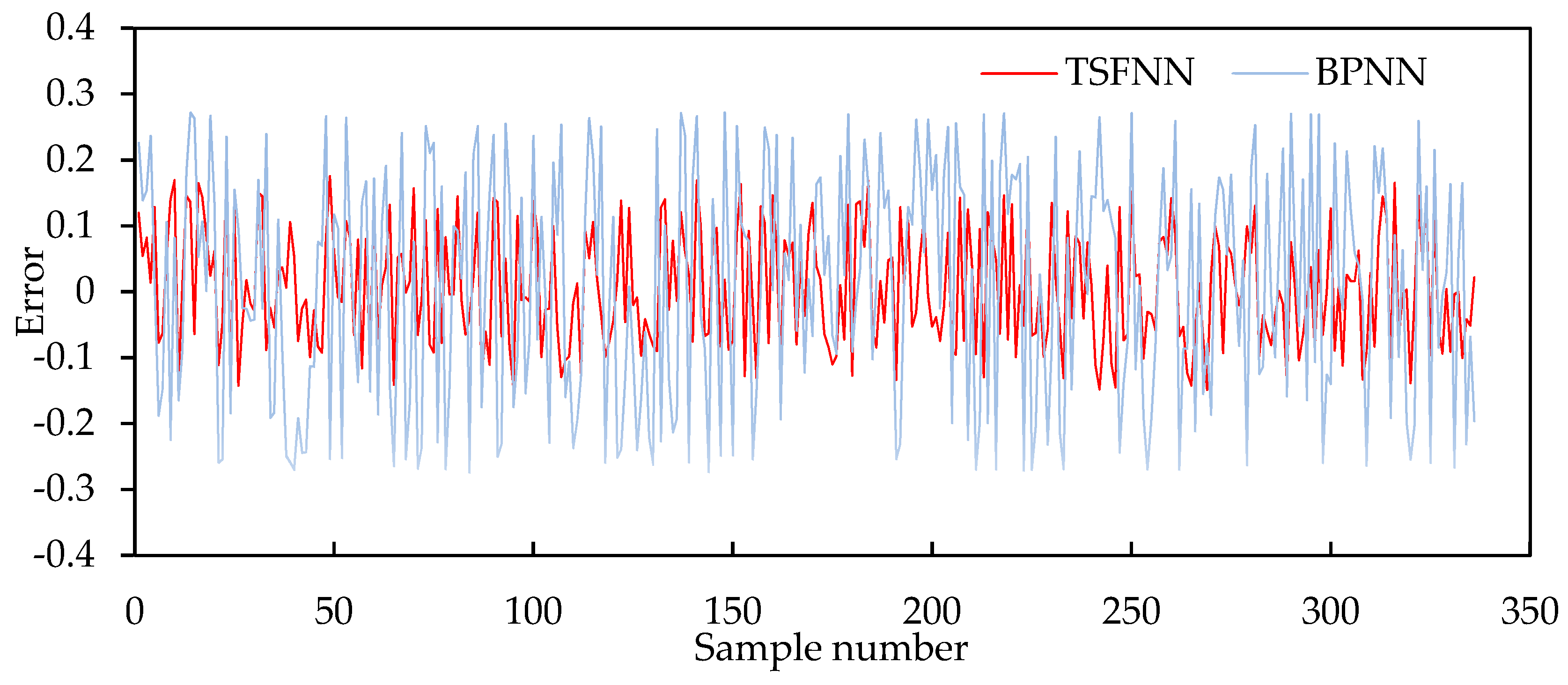
- TSFNN model is developed to accomplish the inherent complex driving decisions, including braking + going straight, braking + turning left, braking + turning right. By analyzing the experimental data, TSFNN has better performance, compared to BPNN, for establishing DDM.
2. Analysis of the Emergency Situations
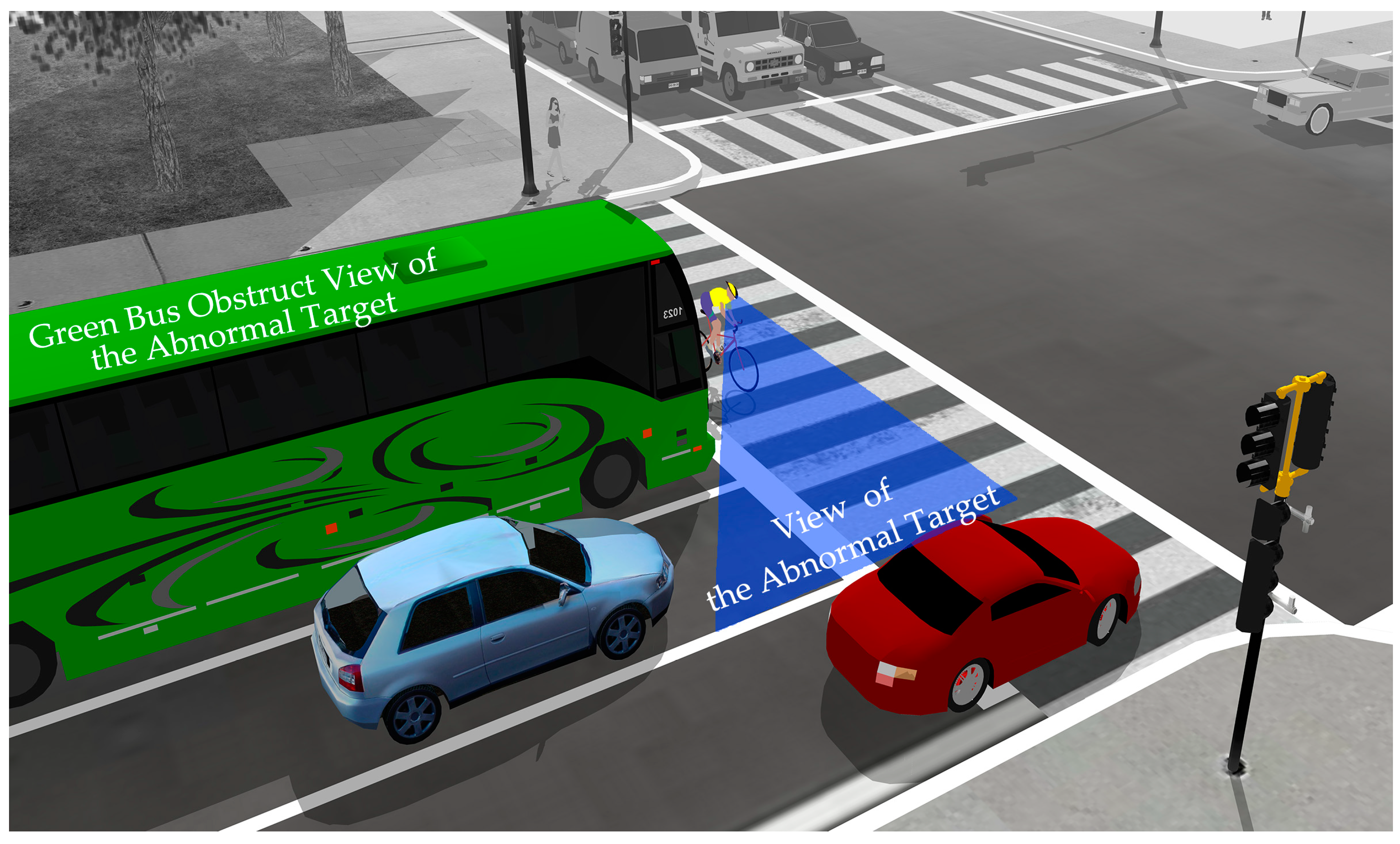
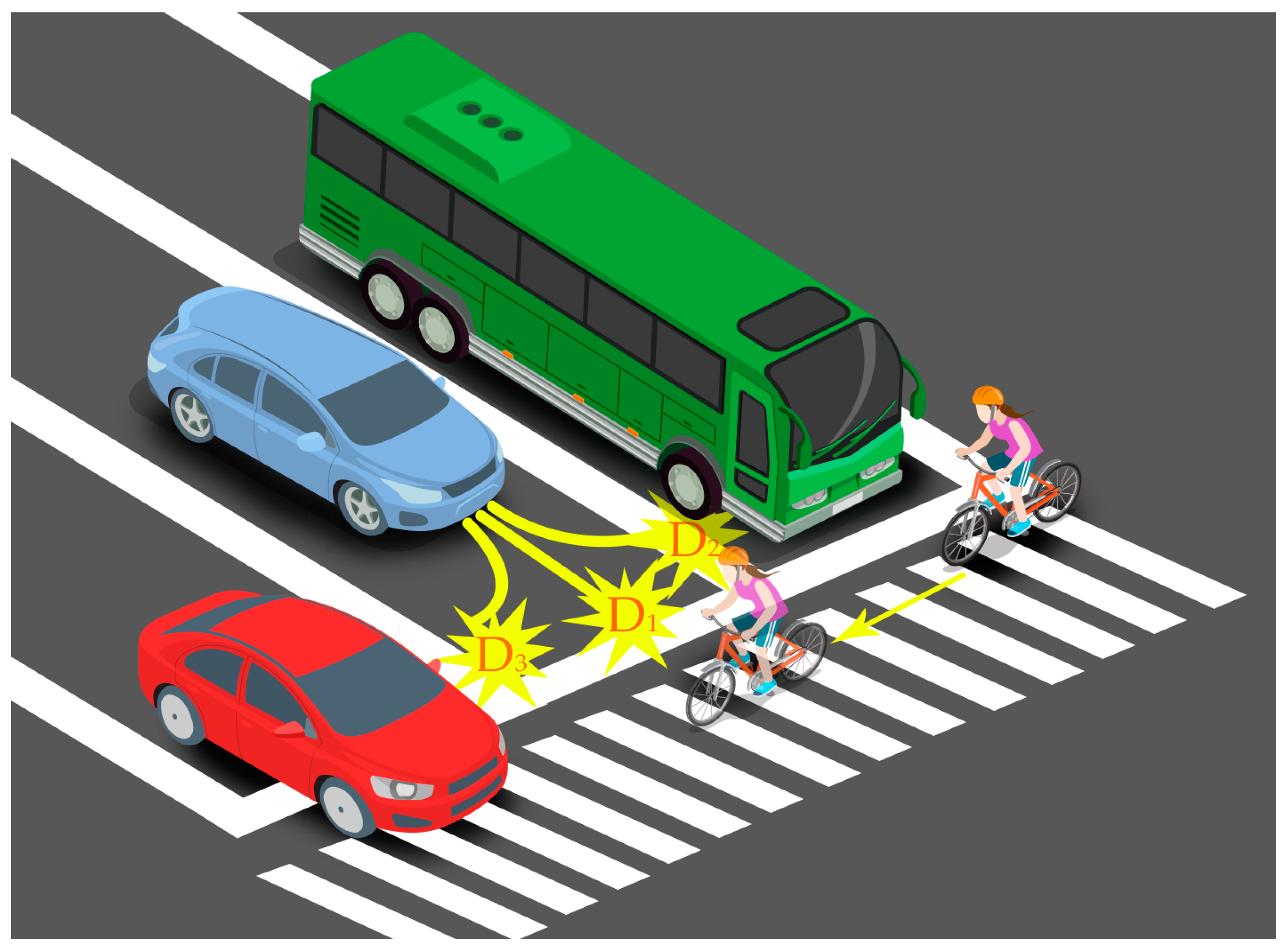
2.1. Definition of the Emergency Situations of the Red Light-Running Behaviors
2.2. Analysis the Ethical Factor of DDM
- Type of Abnormal Target: refers to the types of targets in front of AVs under emergency situations, which are divided into human beings, animals, and transportation facilities. Meanwhile, human beings can be further subdivided into age, gender, and physical condition and so on.
- Number of Abnormal Target: refers to the number of targets in front of AVs under emergency situations. In addition, a survey [8] shows that saving more lives is a significant factor in DDM. Decision-making made by human drivers will change dramatically as the number of rescue targets changes.
- Special State of Abnormal Target: refers to prominent features that distinguish a target from an ordinary person, such as thieves, pregnant women, tramps, etc., as well as people violating the law (red light-running or reverse driving).
- Priority Protection: The principle of priority protection in driving decision can be divided into protecting the passengers and personnel inside the vehicle, protecting the pedestrians outside the vehicle, or reducing the total loss of the collision and so on. AVs may avoid harming several pedestrians by swerving to sacrifice one pedestrian or be faced with the dilemma of sacrificing its own passenger to save one or more pedestrians.
2.3. Analysis the Legal Factor of DDM
- In case of the emergency situations, if the RL comes on and the abnormal target has passed the central line of the crosswalk, the driver has an obligation to avoid collision;
- If the RL has lasted for a period of time and the abnormal target fails to pass the central line of the crosswalk, the liability should be determined according to the specific situations.
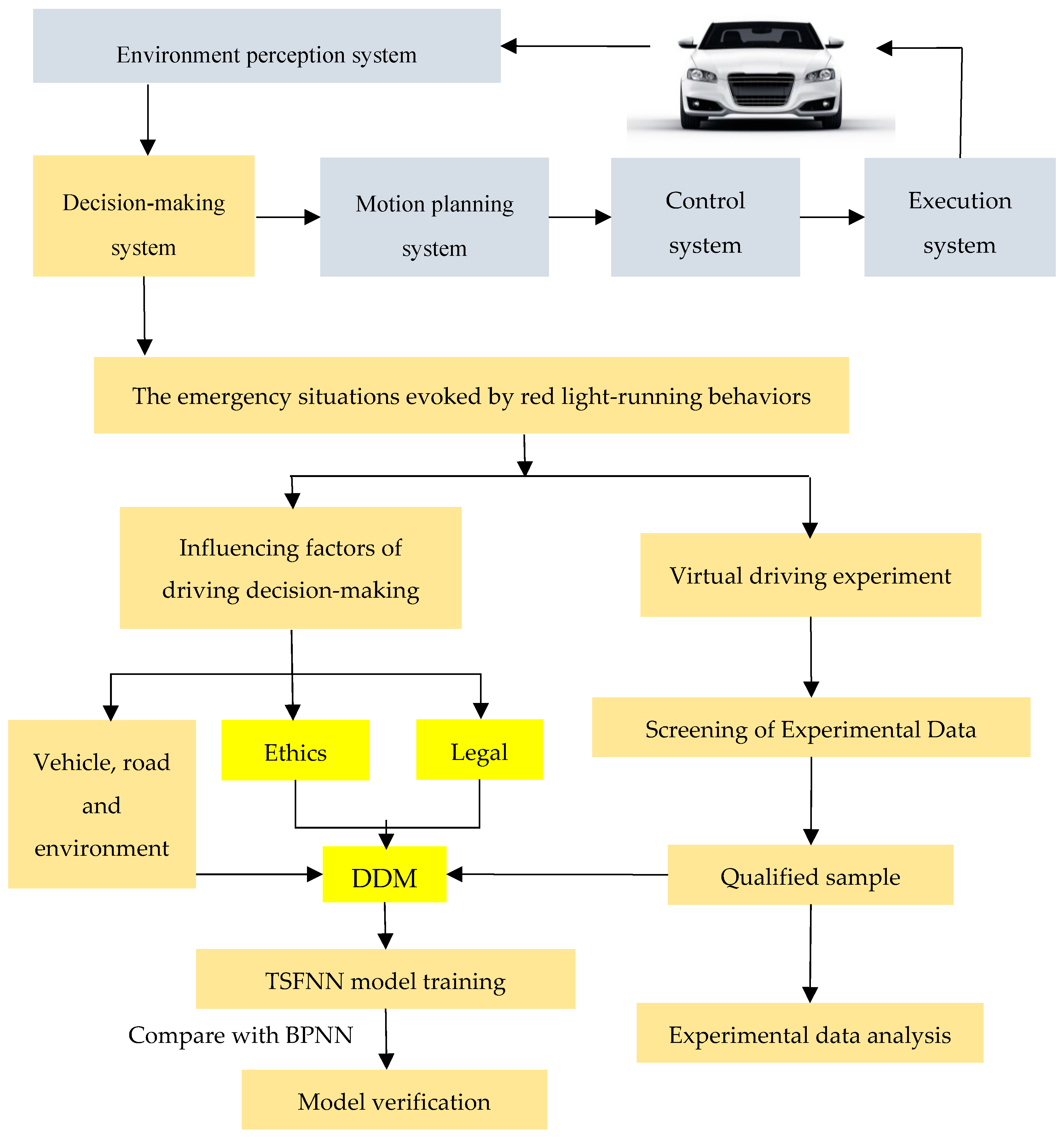
3. Design of DDM
3.1. Establish of DDM
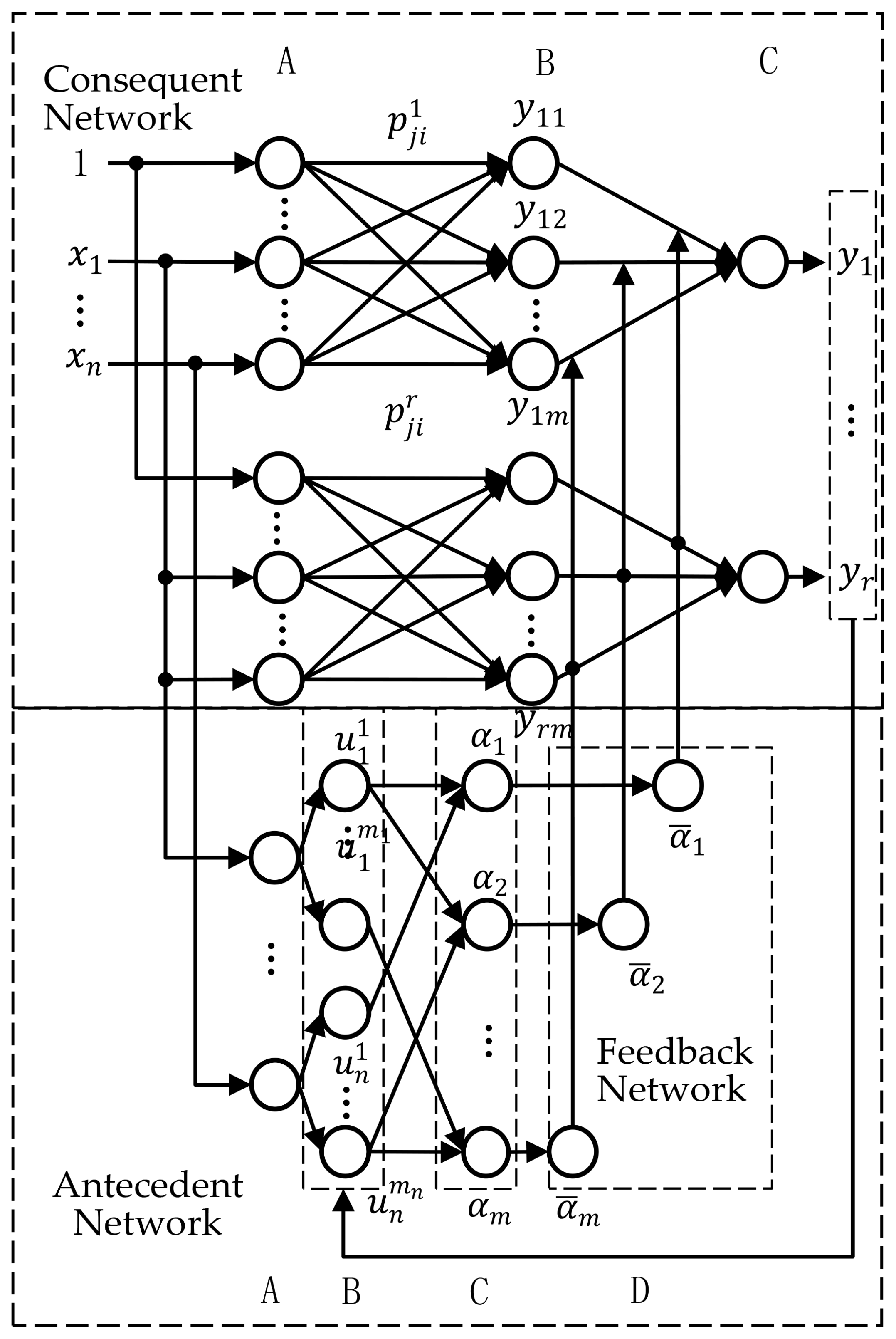
3.2. TSFNN
3.2.1. The Antecedent Network of TSFNN
3.2.2. The Consequent Network of TSFNN
3.2.3. Network Learning Parameters
4. Parameters of DDM
4.1. Input Variables of DDM
4.2. Output Variables of DDM
5. Verification and Analysis of DDM
5.1. Virtual Driving Experiment
5.1.1. Scenes and Equipment of Experiment
5.1.2. Staffs of Experiment
5.1.3. Process of Experiment
5.2. Process of Experimental Data
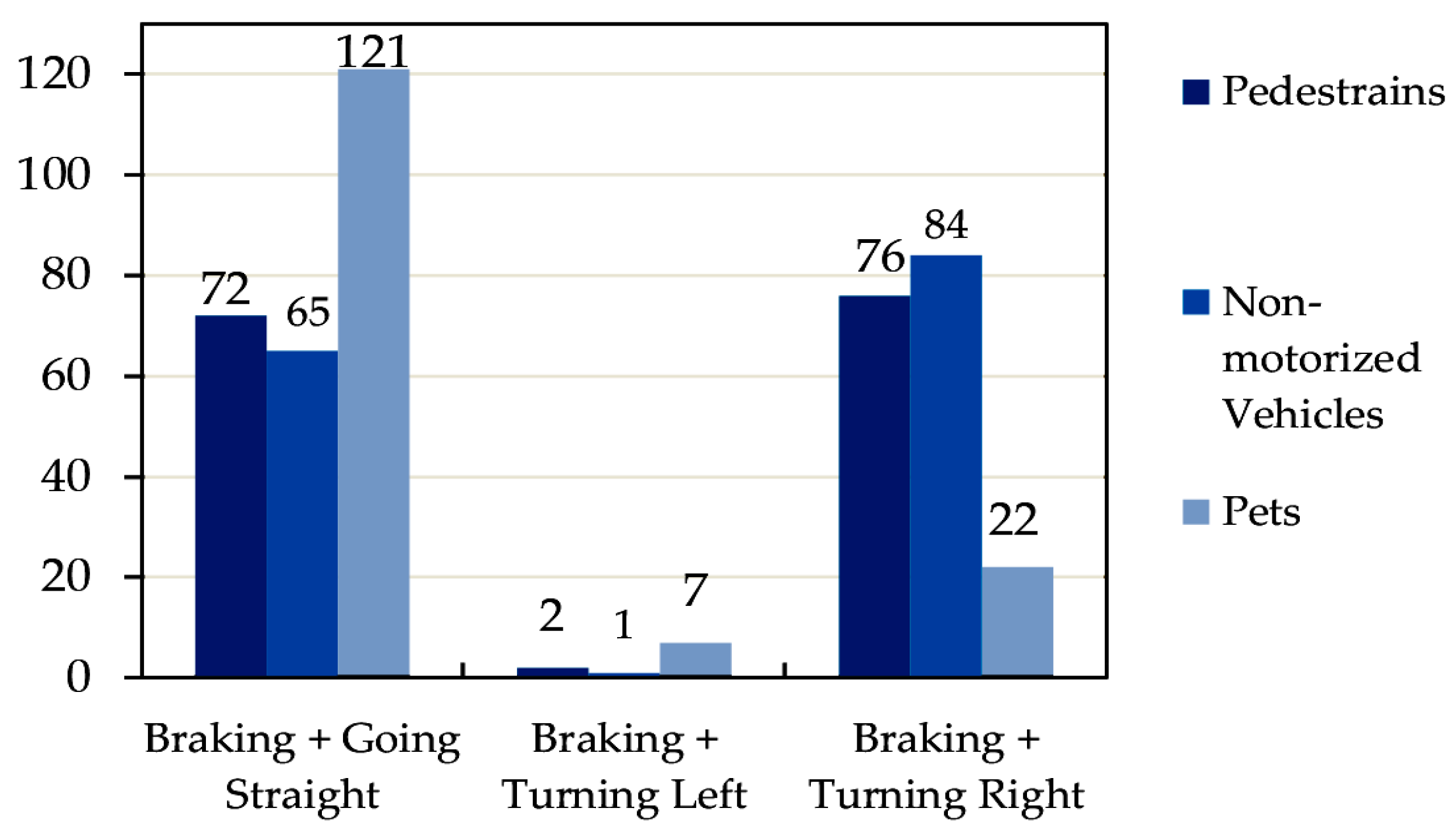
5.2.1. Statistics of Experimental Data
- Most drivers believe that braking + turning left decision will have more severe consequences. Drivers drive on the right side of the road in China. Therefore, the left-turning decision will cause the cockpit to hit the abnormal target directly, which is easy to cause damage to the driver.
- When the abnormal target is pedestrian, there is no significant difference in the number of decisions making between braking + going straight and braking + turning right; as for non-motorized vehicles, braking + turning right decision slightly increased.
- When the target is a pet, in the case of uncertainty about the collision consequences of turning right, a host of drivers will choose to go straight to sacrifice pets avoiding the right side of the vehicle caused by unknown consequences.
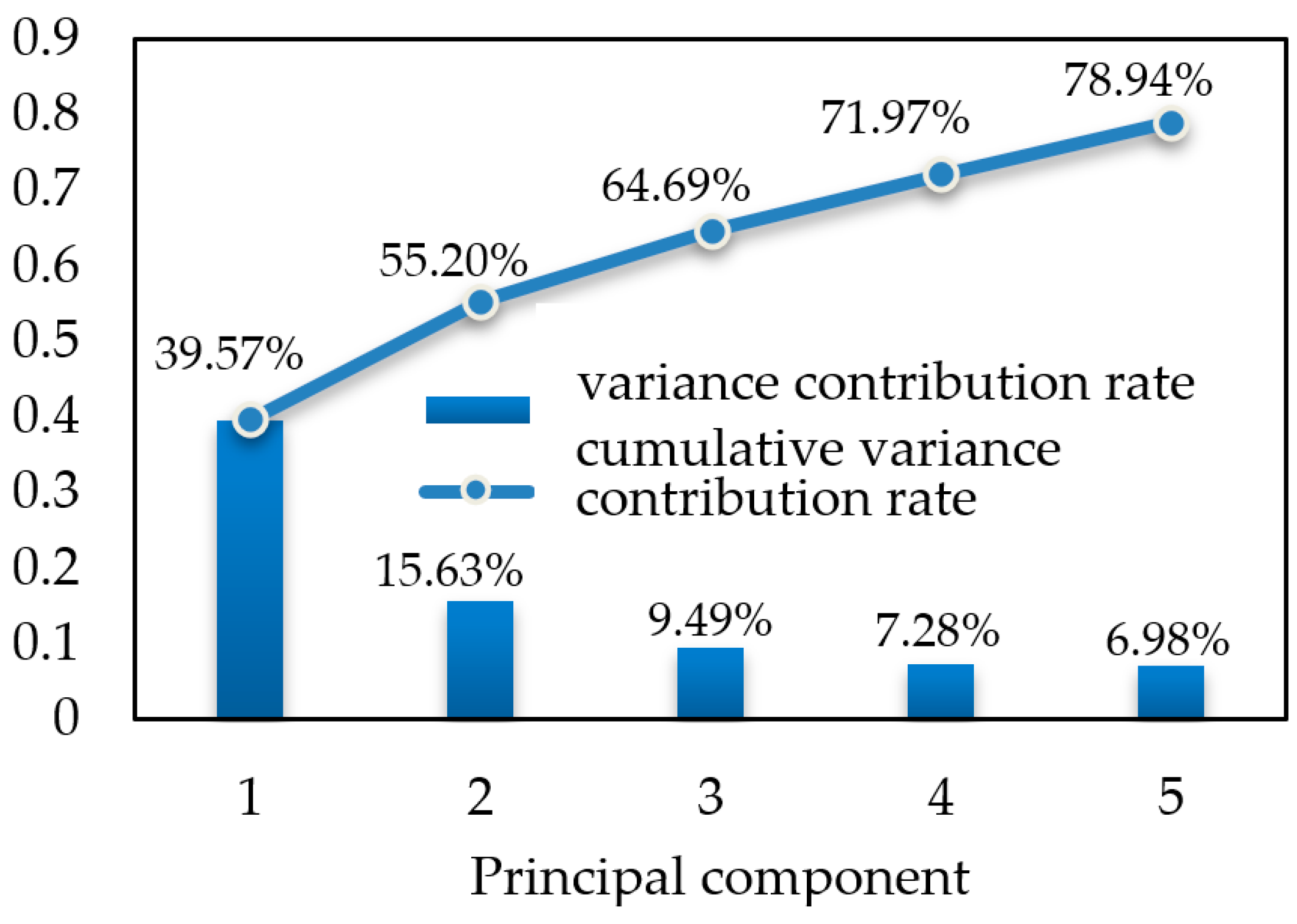
5.2.2. Screening of Experimental Data
5.3. Results of Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P.; Rosen, M.A. Unintended effects of autonomous driving: A study on mobility preferences in the future. Sustainability 2018, 10, 2404. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, P.; Liang, H.; Mei, T. Motion planning for autonomous vehicle based on radial basis function neural network in unstructured environment. Sensors 2014, 14, 17548–17566. [Google Scholar] [CrossRef] [PubMed]
- Herrera-Viedma, E.; Chiclana, F.; Dong, Y.; Cabrerizo, F.J. Special issue on intelligent decision support systems based on soft computing and their applications in real-world problems. Appl. Soft Comput. 2018, 67, 610–612. [Google Scholar] [CrossRef]
- Chen, X.; Tian, G.; Chan, C.Y.; Miao, Y.; Gong, J.; Jiang, Y. Bionic lane driving of autonomous vehicles in complex urban environments: Decision-making analysis. Transp. Res. Rec. J. Transp. Res. Board 2016, 2559, 120–130. [Google Scholar] [CrossRef]
- Lv, W.; Song, W.; Liu, X.; Ma, J. A Microscopic lane changing process model for multilane traffic. Phys. A Stat. Mech. Appl. 2013, 392, 1142–1152. [Google Scholar] [CrossRef]
- Wang, X.; Yang, X. Study on decision mechanism of driving behavior based on decision tree. J. Syst. Simul. 2008, 20, 414–415. [Google Scholar]
- Castaño, F.; Beruvides, G.; Villalonga, A.; Haber, R. Self-tuning method for increased obstacle detection reliability based on internet of things LiDAR sensor models. Sensors 2018, 18, 1508. [Google Scholar] [CrossRef] [PubMed]
- Bonnefon, J.F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef] [PubMed]
- Blackburn, S. Trolley problem. Yale Law J. 2016, 94, 1395–1415. [Google Scholar]
- Martin, R.; Kusev, I.; Cooke, A.J.; Baranova, V.; Schaik, P.V.; Kusev, P. Commentary: The social dilemma of autonomous vehicles. Front. Psychol. 2017, 8, 808. [Google Scholar] [CrossRef] [PubMed]
- Greene, J. Our Driverless Dilemma. Science 2016, 352, 1514–1515. [Google Scholar] [CrossRef] [PubMed]
- Hevelke, A.; Nida-Rümelin, J. Responsibility for crashes of autonomous vehicles: An ethical analysis. Sci. Eng. Ethics 2015, 21, 619–630. [Google Scholar] [CrossRef] [PubMed]
- Hauser, M.; Cushman, F.; Young, L.; Jin, K.X.; Mikhail, J. A dissociation between moral judgments and justifications. Mind Lang. 2007, 22, 1–21. [Google Scholar] [CrossRef]
- Barman, B.; Kanjilal, R.; Mukhopadhyay, A. Neuro-Fuzzy controller design to navigate unmanned vehicle with construction of traffic rules to avoid obstacles. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 2016, 24, 433–449. [Google Scholar] [CrossRef]
- Thornton, S.M.; Pan, S.; Erlien, S.M.; Gerdes, J.C. Incorporating ethical considerations into automated vehicle control. IEEE Trans. Intell. Transp. 2017, 18, 1429–1439. [Google Scholar] [CrossRef]
- Goodall, N. Ethical decision making during automated vehicle crashes. Transp. Res. Rec. J. Transp. Res. Board 2014, 2424, 58–65. [Google Scholar] [CrossRef]
- Rahwan, I. Moral Machine. Available online: http://moralmachine.mit.edu/ (accessed on 28 May 2017).
- Sadeghian, R.; Sadeghian, M.R. A decision support system based on artificial neural network and fuzzy analytic network process for selection of machine tools in a flexible manufacturing system. Int. J. Adv. Manuf. Technol. 2016, 82, 1795–1803. [Google Scholar] [CrossRef]
- Azadeh, A.; Saberi, M.; Anvari, M.; Mohamadi, M.A. Integrated artificial neural network-genetic algorithm clustering ensemble for performance assessment of decision making units. J. Intell. Manuf. 2011, 22, 229–245. [Google Scholar] [CrossRef]
- Efendigil, T.; Önüt, S.; Kahraman, C. A decision support system for demand forecasting with artificial neural networks and neuro-fuzzy models: A comparative analysis. Expert Syst. Appl. 2009, 36, 6697–6707. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; Zhang, J.; Ban, X. Driver’s behavior and decision-making optimization model in mixed traffic environment. Adv. Mech. Eng. 2015, 7, 759571. [Google Scholar] [CrossRef]
- Zhang, J.; Liao, Y.; Wang, S.; Han, J. Study on driving decision-making mechanism of autonomous vehicle based on an optimized support vector machine regression. Appl. Sci. 2018, 8, 13. [Google Scholar] [CrossRef]
- Campos, A.C.S.M.; Mareschal, B.; Almeida, A.T.D. Fuzzy Flowsort: An integration of the flowsort method and fuzzy set theory for decision making on the basis of inaccurate quantitative data. Inform. Sci. 2015, 293, 115–124. [Google Scholar] [CrossRef]
- Jan-Jaap, V.D.B.; Sandell, M.; Borjesson, P.O. ML estimation of time and frequency offset in OFDM systems. IEEE Trans. Signal Process. 1997, 45, 1800–1805. [Google Scholar]
- Chun, M.G.; Bien, Z. Fuzzy petri net representation and reasoning methods for rule-based decision making systems. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 1993, 76, 974–983. [Google Scholar]
- He, K.; Sun, H.; Cheng, W. Application of fuzzy neural network based on t-s model for mobile robot to avoid obstacles intelligent control and automation. In Proceedings of the World Congress on Intelligent Control and Automation (WCICA), Chongqing, China, 25–27 June 2008; pp. 8282–8285. [Google Scholar]
- Wang, P. Improved T-S Fuzzy Neural Network in Application of Speech Recognition System. Comput. Eng. Appl. 2009, 45, 246–248. [Google Scholar]
- Zhang, Q. Intelligent vehicle fuzzy neural network—Based obstacle avoidance intelligent vehicle fuzzy neural network—Based obstacle avoidance. Agric. Equip. Veh. Eng. 2015, 53, 33–35. [Google Scholar]
- Nyholm, S.; Smids, J. The ethics of accident-algorithms for self-driving cars: An applied trolley problem? Eth. Theory Moral Pract. 2016, 19, 1275–1289. [Google Scholar] [CrossRef]
- Louis. German Autonomen: Morality Police. Available online: http://louisproyect.wordpress.com/2011/12/06/german-autonomen-morality-police/ (accessed on 12 June 2011).
- Wu, C.; Yao, L.; Zhang, K. The Red-Light Running Behavior of Electric Bike Riders and Cyclists at Urban Intersections in China: An Observational Study. Accid. Anal. Prev. 2012, 49, 186–192. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Shao, Z. The essence, legal basis and principle of Traffic accident responsibility determination of public security organs. J. Shanghai Police Coll. 2016, 26, 57–65. [Google Scholar]
- Zhao, J.; Shao, X.; Zhao, L.; Zhao, S.; Niu, X. Driving behavior theory and computer simulation system of driver’s risk perception based on 3D. Procedia Soc. Behav. Sci. 2013, 96, 1686–1695. [Google Scholar] [CrossRef]
- Du, G.; Jiang, Z.; Diao, X.; Ye, Y.; Yao, Y. Variances handling method of clinical pathways based on T-S fuzzy neural networks with novel hybrid learning algorithm. J. Med. Syst. 2012, 36, 1283–1300. [Google Scholar] [CrossRef] [PubMed]
- Hyun, C.H.; Park, C.W.; Kim, S. Takagi–Sugeno fuzzy model based indirect adaptive fuzzy observer and controller design. Inform. Sci. 2010, 180, 2314–2327. [Google Scholar] [CrossRef]
- Wei, S. Driving Fatigue Fusion Detection Based on T-S Fuzzy Neural Network Evolved by Subtractive Clustering and Particle Swarm Optimization. J. Southeast Univ. 2009, 25, 356–361. [Google Scholar]
- Urmson, C.; Anhalt, J.; Bagnell, D.; Baker, C.; Bittner, R.; Clark, M.N.; Dolan, J.; Duggins, D.; Galatali, T.; Geyer, C. Autonomous driving in urban environments: Boss and the urban challenge. J. Field Robot. 2008, 25, 425–466. [Google Scholar] [CrossRef]
- .Halko, N.; Martinsson, P.G.; Shkolnisky, Y.; Tygert, M. An Algorithm for the Principal Component Analysis of Large Data Sets. SIAM J. Sci. Comput. 2011, 33, 2580–2594. [Google Scholar] [CrossRef]
- Chen, Y.; Yi, Z. The BP Artificial Neural Network Model on Expressway Construction Phase Risk. Syst. Eng. Procedia 2012, 4, 409–415. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | RL | AT-T | AT-S | Location of Abnormal Target | Liability of Drivers | |
|---|---|---|---|---|---|---|
| Going Straight | Changing Lanes | |||||
| 1 | Red light Comes on Just Now | Pedestrians | Run | Has Already Passed the Center Line Just Now | Above Primary Liability | |
| 2 | Non-motor Vehicles | Hold | ||||
| 3 | Ride | |||||
| 4 | Pet | Hold | ||||
| 5 | Not Pull | |||||
| 6 | Red light Has Already On | Pedestrians | Run | Has Not Passed the Center Line Yet | Equal Liability | No Liability |
| 7 | Non-motor Vehicles | Hold | ||||
| 8 | Ride | Secondary Liability | ||||
| 9 | Pet | Pull | ||||
| 10 | Not Pull | No Liability | ||||
| Indicators | Components | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| V1 | 0.938 | −0.045 | −0.088 | 0.022 | −0.052 |
| RL | 0.927 | −0.009 | −0.027 | 0.209 | −0.118 |
| AT-N | 0.889 | −0.073 | −0.014 | 0.255 | 0.037 |
| W | 0.787 | −0.106 | −0.091 | 0.303 | −0.109 |
| B | −0.079 | 0.413 | 0.741 | −0.131 | 0.053 |
| LS | 0.728 | −0.012 | 0.134 | 0.061 | −0.112 |
| V2 | 0.699 | −0.156 | −0.122 | 0.318 | 0.097 |
| AT-T | −0.129 | 0.924 | 0.064 | −0.046 | 0.048 |
| AT-S | −0.014 | 0.907 | 0.127 | −0.054 | −0.046 |
| RM | −0.207 | −0.047 | 0.898 | 0.250 | −0.228 |
| AT-T | −0.079 | 0.413 | −0.131 | 0.864 | 0.053 |
| DA | 0.255 | 0.030 | 0.691 | −0.424 | 0.242 |
| T | 0.511 | 0.001 | −0.014 | 0.612 | 0.142 |
| WE | 0.491 | 0.096 | −0.086 | 0.530 | −0.148 |
| D | −0.168 | 0.004 | −0.011 | 0.049 | 0.832 |
| θ | −0.191 | 0.032 | 0.105 | −0017 | 0.593 |
| Number | Indicator of Decision-Making |
|---|---|
| 1 | Velocity of host vehicle (V1) |
| 2 | Duration of red light (RL) |
| 3 | Number of abnormal target (AT-N) |
| 4 | Type of abnormal target (AT-T) |
| 5 | State of abnormal target (AT-S) |
| 6 | The road marking RM |
| 7 | Velocity of the right-lane vehicle (V2) |
| 8 | The distance between the host vehicle and the obstacle (D) |
| Input Variables | Meanings of Input Variables | Principle of Process Data |
|---|---|---|
| Velocity of host vehicle (V1) refers to the instantaneous speed of the experimental vehicle when the driver is making decisions. | , keep the data; , eliminate the data. | |
| Duration of red light (RL). , the right light is on just now; , the right light has already been on. | , X2 = 1; , X2 = 2. | |
| Number of abnormal target (AT-N). Two groups of control experiments of AT-N = 1 and AT-N = 3 are set. | AT-N = 1, X3 = 1; AT-N = 3, X3 = 2. | |
| Type of abnormal target (AT-T) is divided into pedestrians, non-motorized vehicles, pets. | AT-T = pedestrians, X4 = 1; AT-T = non-motorized vehicles, X4 = 2; AT-T = pets, X4 = 3. | |
| State of abnormal target (AT-S) is divided into legal and illegal behaviors. Pedestrian running, holding non-motorized vehicles, pulling pets are classified as the legal behaviors; cycling non-motorized vehicles, not pulling pets are classified as the illegal behaviors. | AT-S = legal behaviors, X5 = 1; AT-S = illegal behaviors, X5 = 2. | |
| . | Velocity of the right-lane vehicle (V2) refers to the instantaneous speed of the vehicle in the right lane when the driver is making a decision. | , keep the data; , eliminate the data. |
| The distance between the host vehicle and the obstacle (D) refers to the distance between the centroid of the host vehicle and the abnormal target. | It is obtainedy joint calculation of the centroid coordinate of each object in the situations, regardless of the height difference in the centroid of two vehicles. |
| Decision-Making | Symbol | Threshold | Output Threshold Range |
|---|---|---|---|
| Braking + going straight | D1 | 0.5 | [0, 1] |
| Braking + turning left | D2 | 1.5 | (1, 2) |
| Braking + turning right | D3 | 2.5 | [2, 3] |
| TSFNN | BPNN | |||||||
|---|---|---|---|---|---|---|---|---|
| Training Samples | Test Samples | Training Samples | Test Samples | |||||
| Braking + Going Straight | Braking + Turning Right | Braking + Going Straight | Braking + Turning Right | Braking + Going Straight | Braking + Turning Right | Braking + Going Straight | Braking + Turning Right | |
| MAE | 8.08% | 8.80% | 7.24% | 10.77% | 12.11% | 12.35% | 11.43% | 15.44% |
| RMSE | 0.0044 | 0.0053 | 0.0037 | 0.0083 | 0.0099 | 0.0112 | 0.0092 | 0.0146 |
| Maximum absolute error | 17.96% | 16.51% | 19.60% | 17.40% | 27.18% | 27.43% | 31.18% | 29.52% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Zhang, J.; Wang, S.; Li, P.; Liao, Y. Ethical and Legal Dilemma of Autonomous Vehicles: Study on Driving Decision-Making Model under the Emergency Situations of Red Light-Running Behaviors. Electronics 2018, 7, 264. https://doi.org/10.3390/electronics7100264
Li S, Zhang J, Wang S, Li P, Liao Y. Ethical and Legal Dilemma of Autonomous Vehicles: Study on Driving Decision-Making Model under the Emergency Situations of Red Light-Running Behaviors. Electronics. 2018; 7(10):264. https://doi.org/10.3390/electronics7100264
Chicago/Turabian StyleLi, Sixian, Junyou Zhang, Shufeng Wang, Pengcheng Li, and Yaping Liao. 2018. "Ethical and Legal Dilemma of Autonomous Vehicles: Study on Driving Decision-Making Model under the Emergency Situations of Red Light-Running Behaviors" Electronics 7, no. 10: 264. https://doi.org/10.3390/electronics7100264
APA StyleLi, S., Zhang, J., Wang, S., Li, P., & Liao, Y. (2018). Ethical and Legal Dilemma of Autonomous Vehicles: Study on Driving Decision-Making Model under the Emergency Situations of Red Light-Running Behaviors. Electronics, 7(10), 264. https://doi.org/10.3390/electronics7100264