
Miniaturized Blood Pressure Telemetry System with RFID Interface


Abstract
:1. Introduction
2. RFID Pressure Sensing System
2.1. Requirements
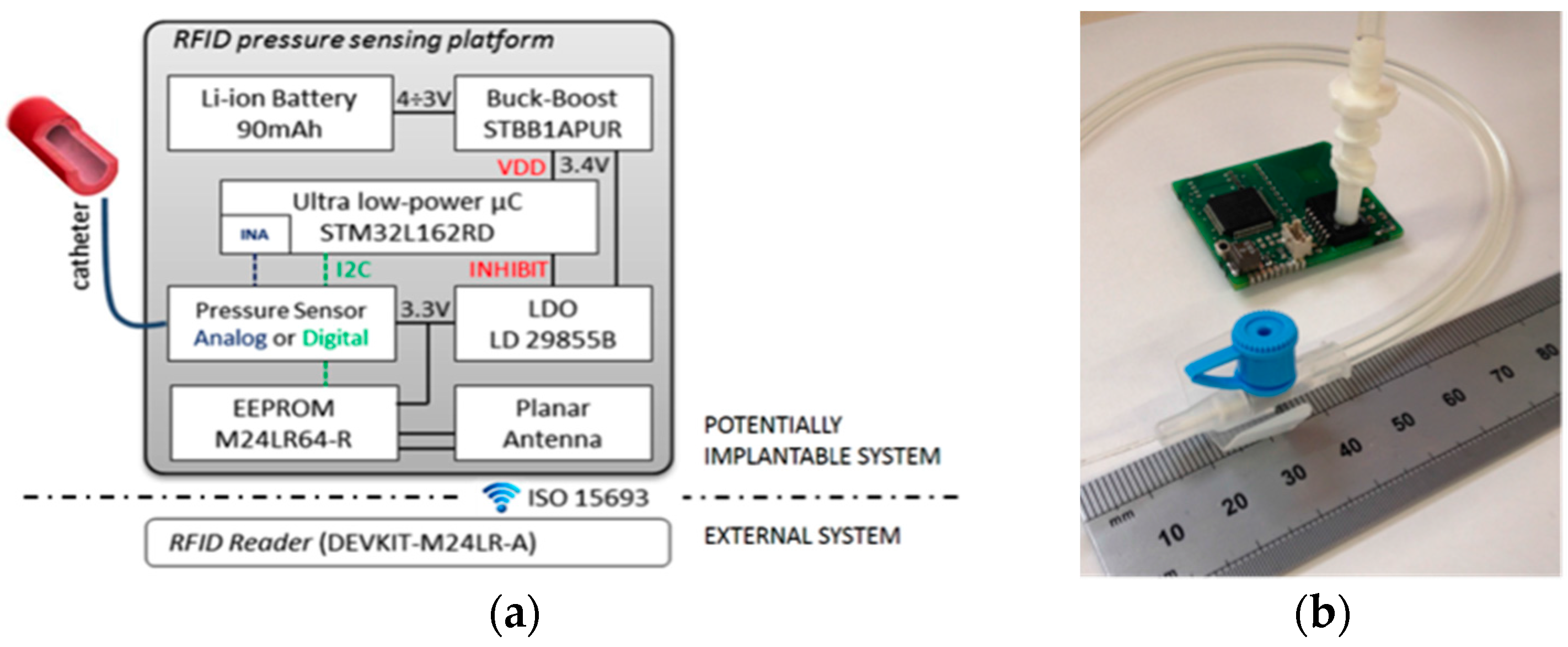
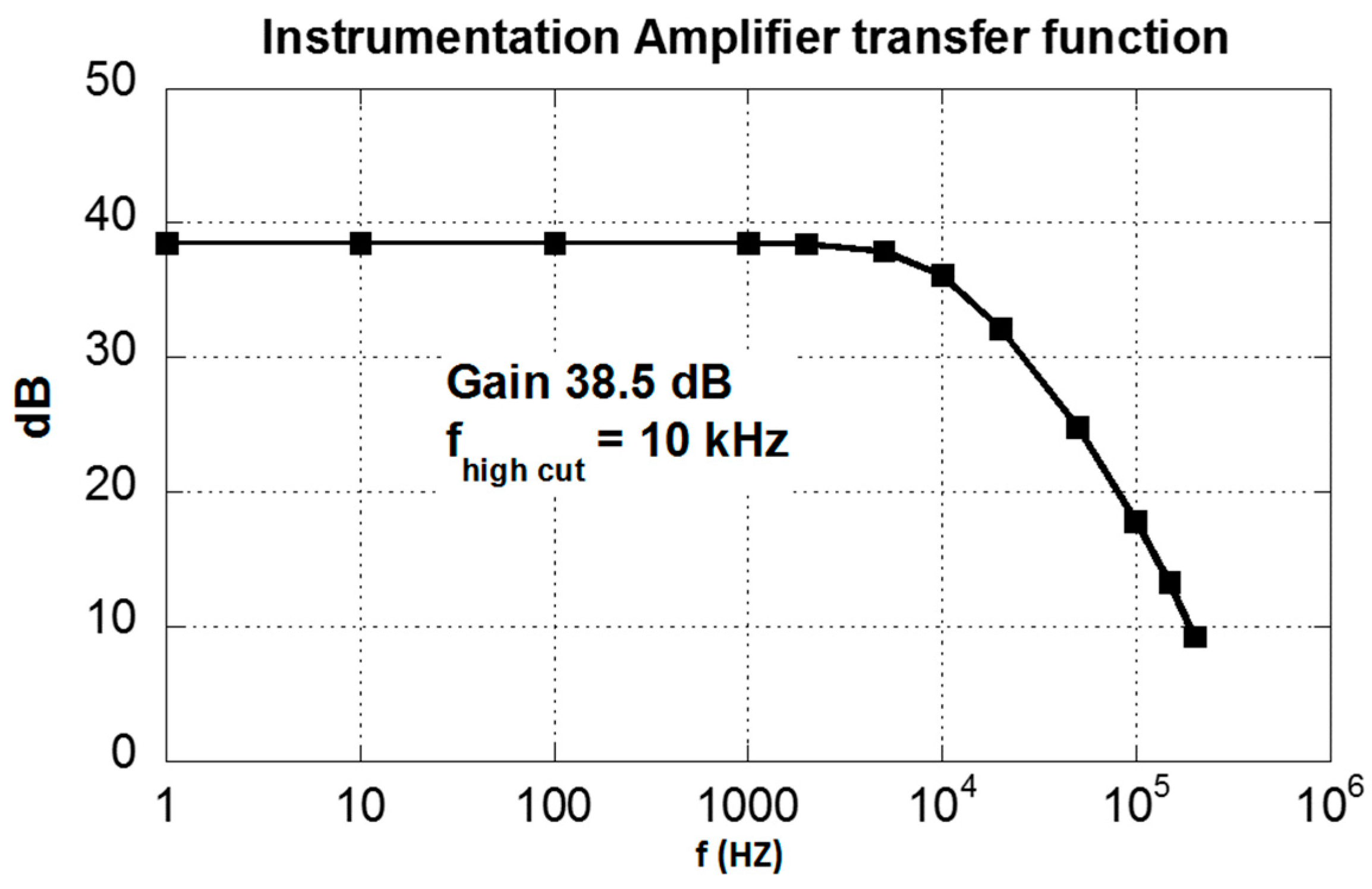
2.2. Sensor Platform Description
2.3. Firmware
2.4. Power Consumption
2.5. The RFID Interface
3. System Characterization and Experimental Results
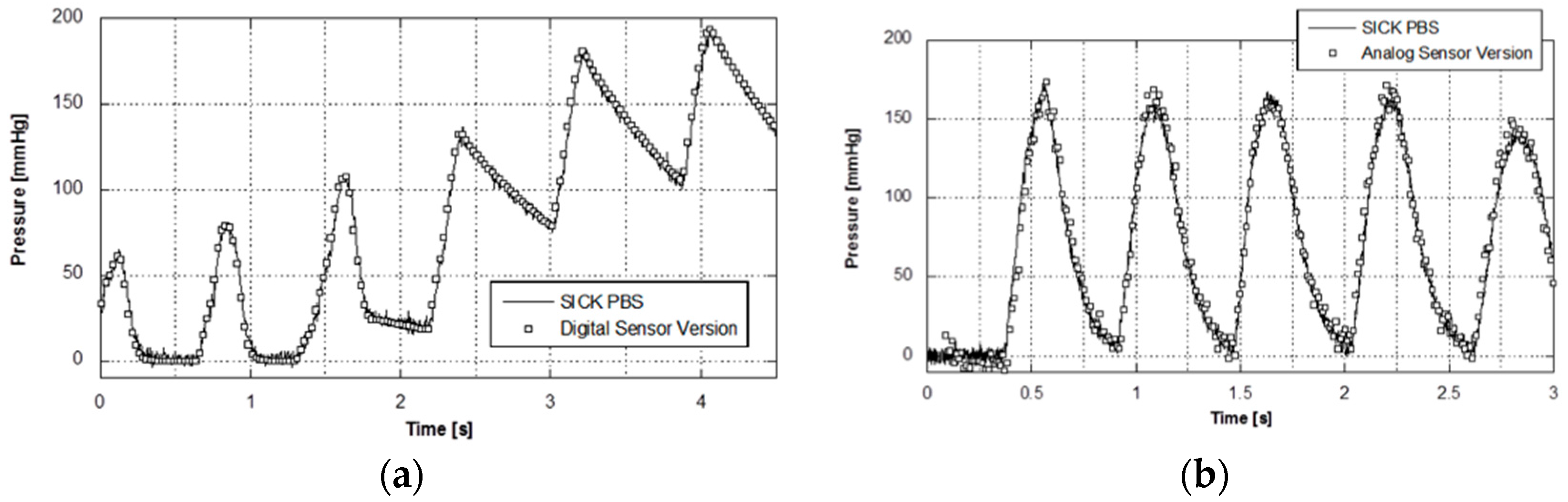
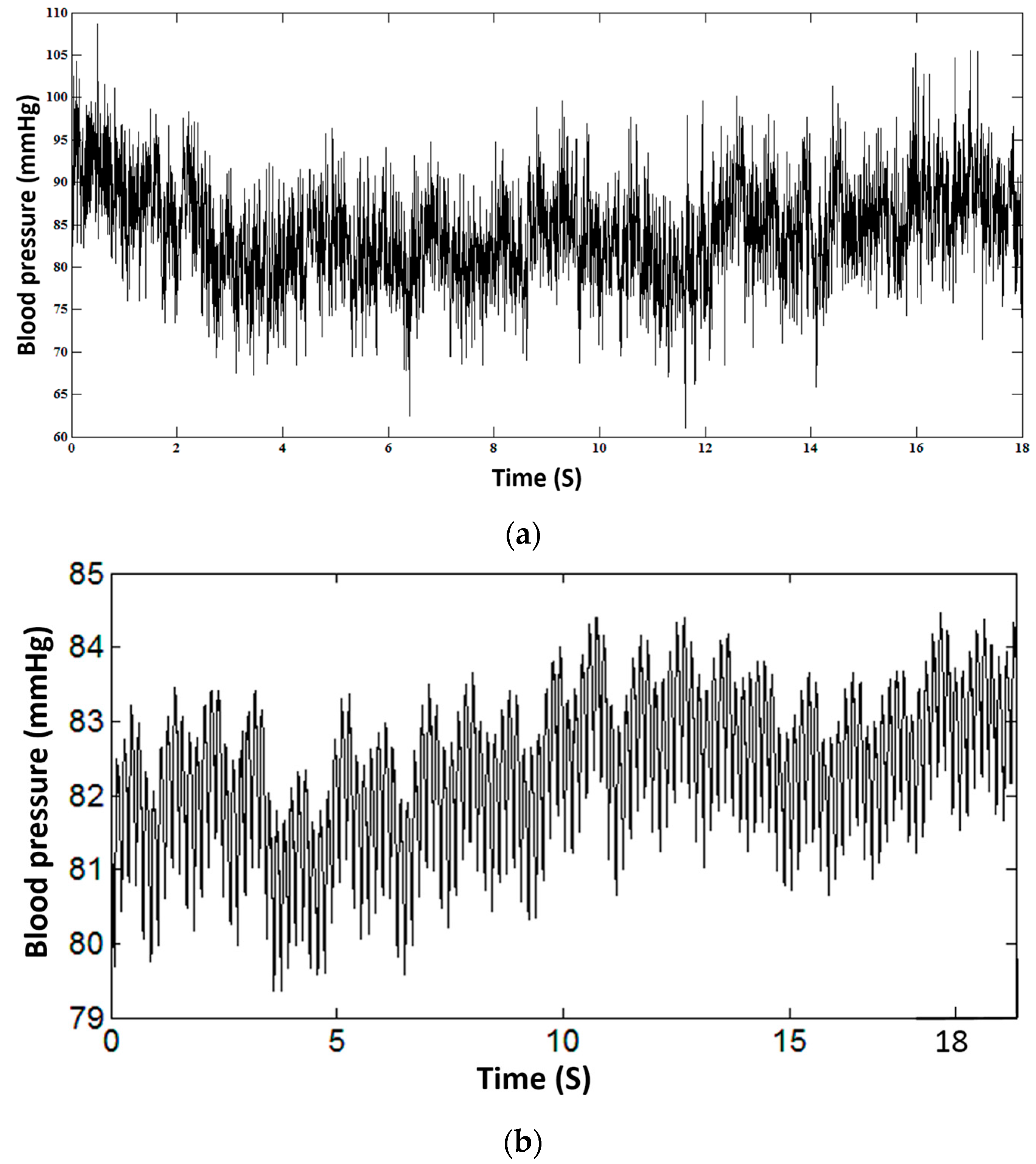
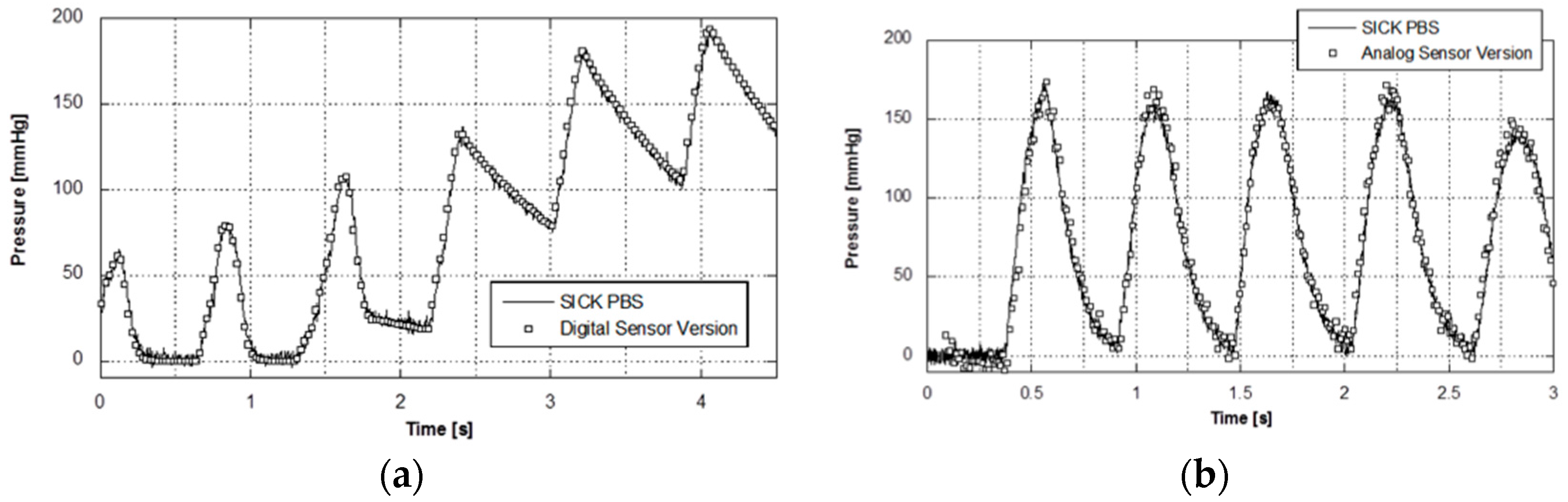
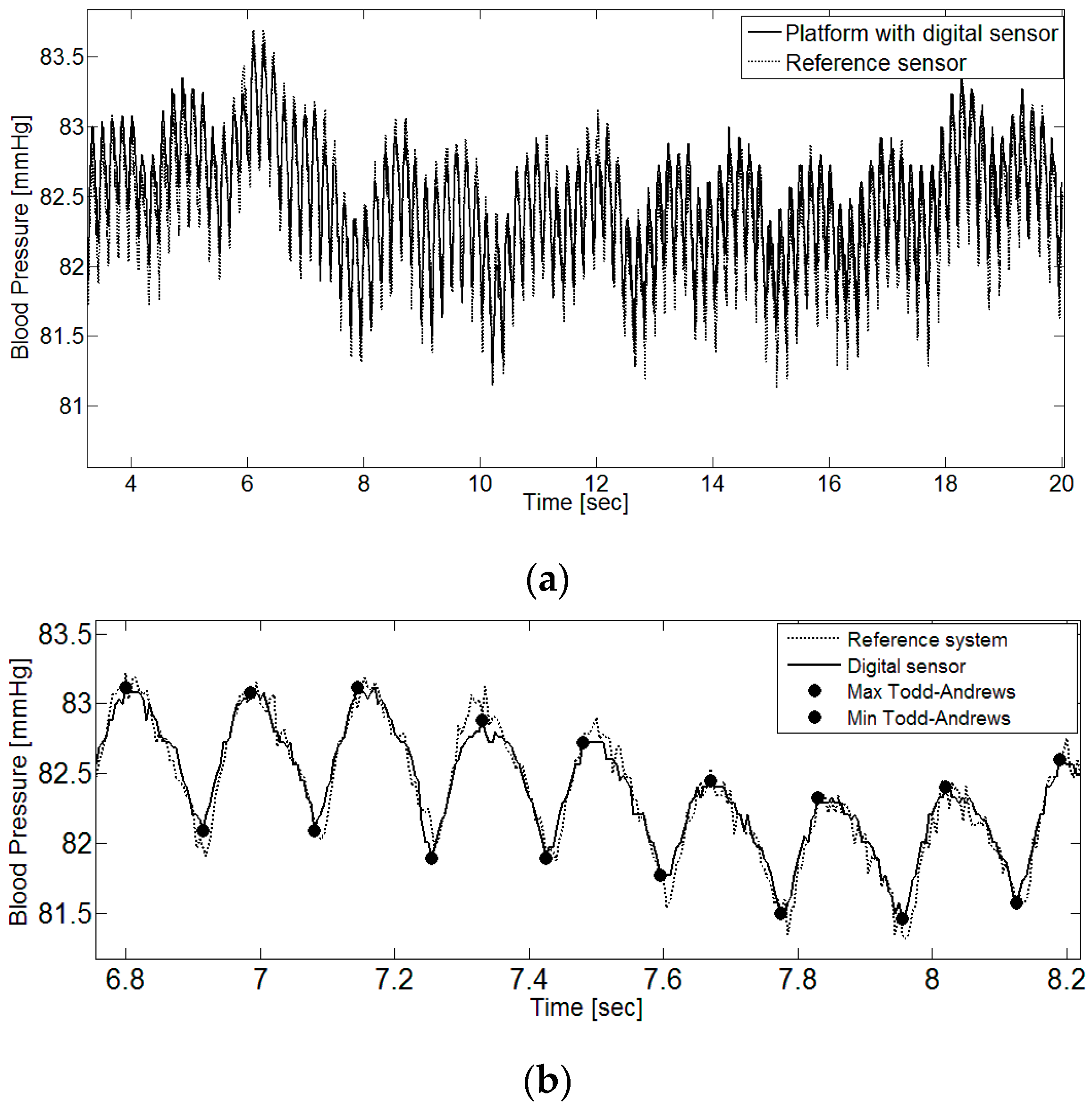
3.1. System with Digital Pressure Sensor
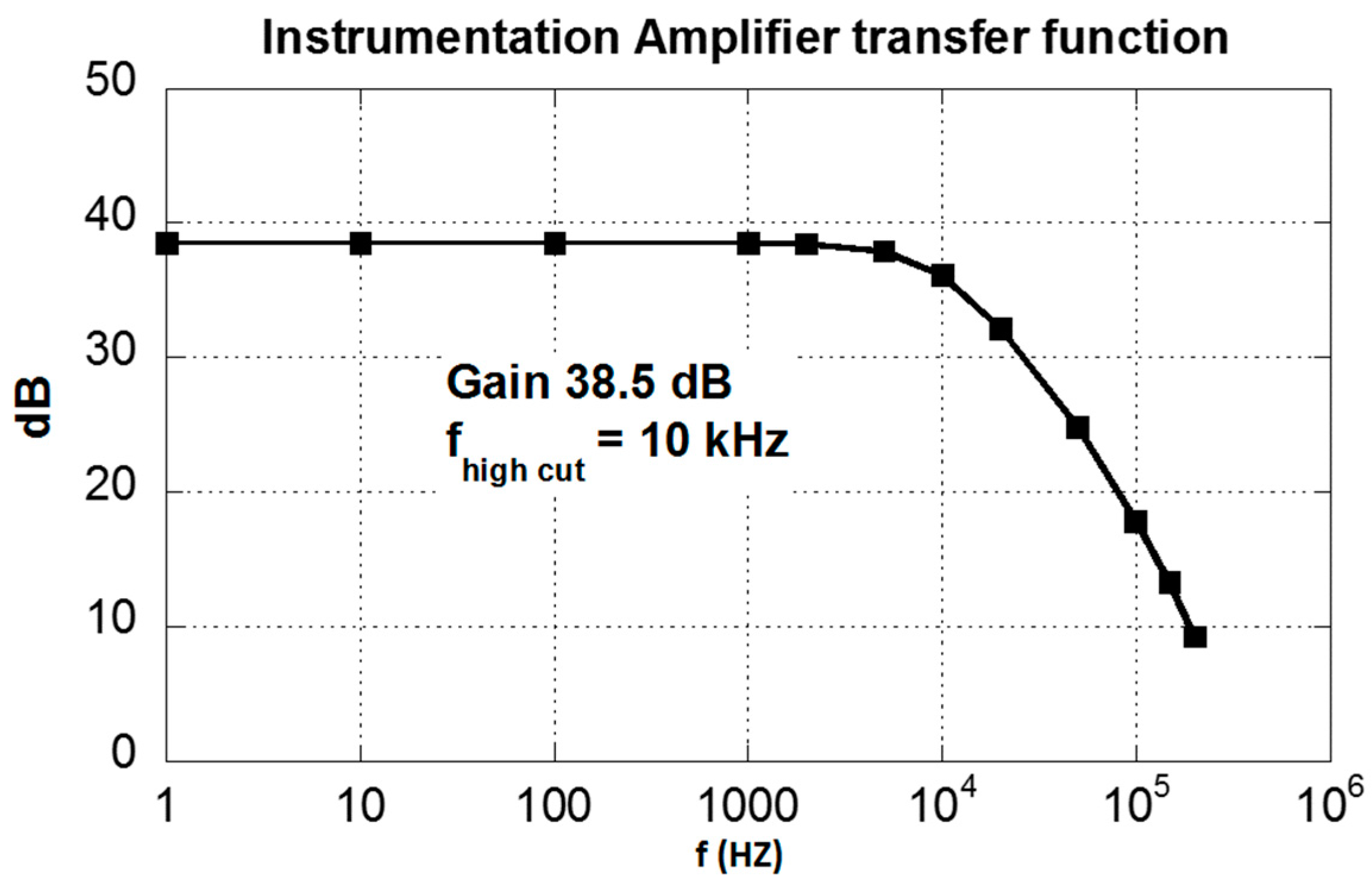
3.2. System with Analog Pressure Sensor
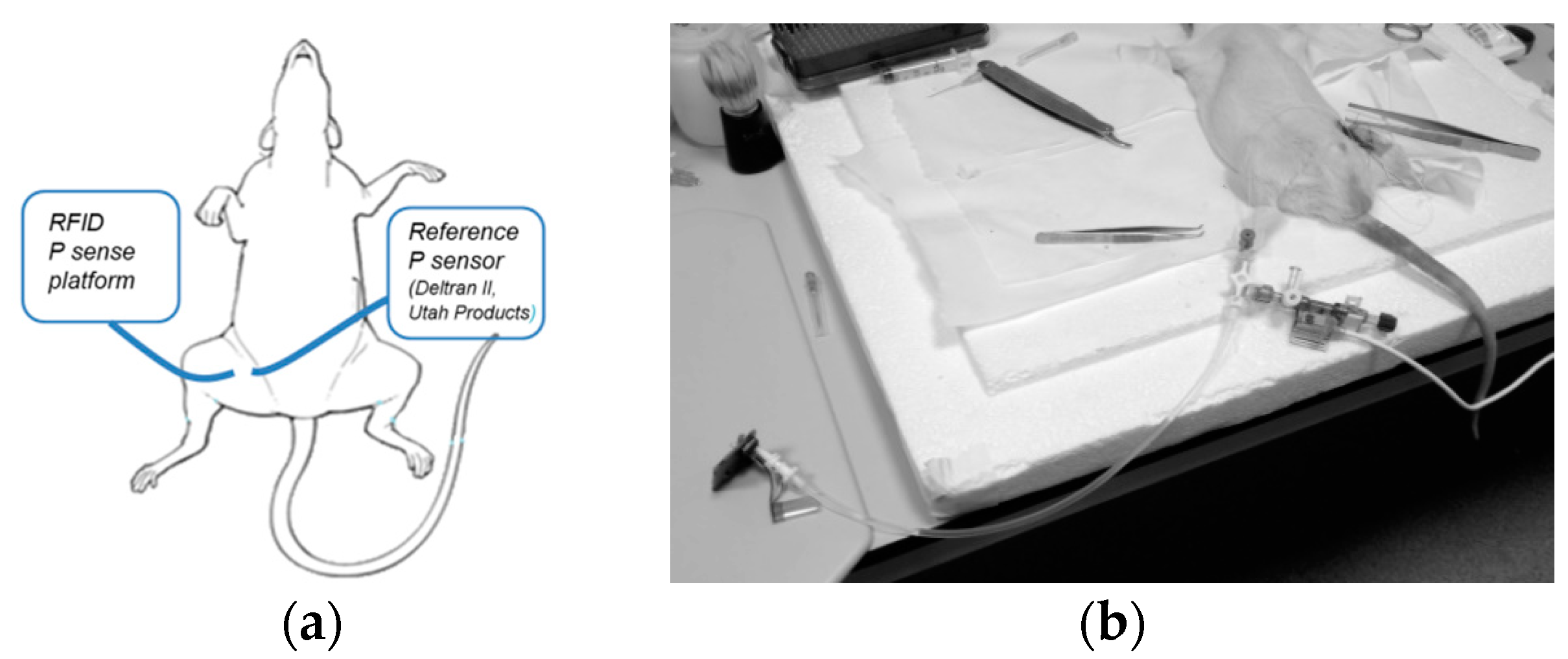
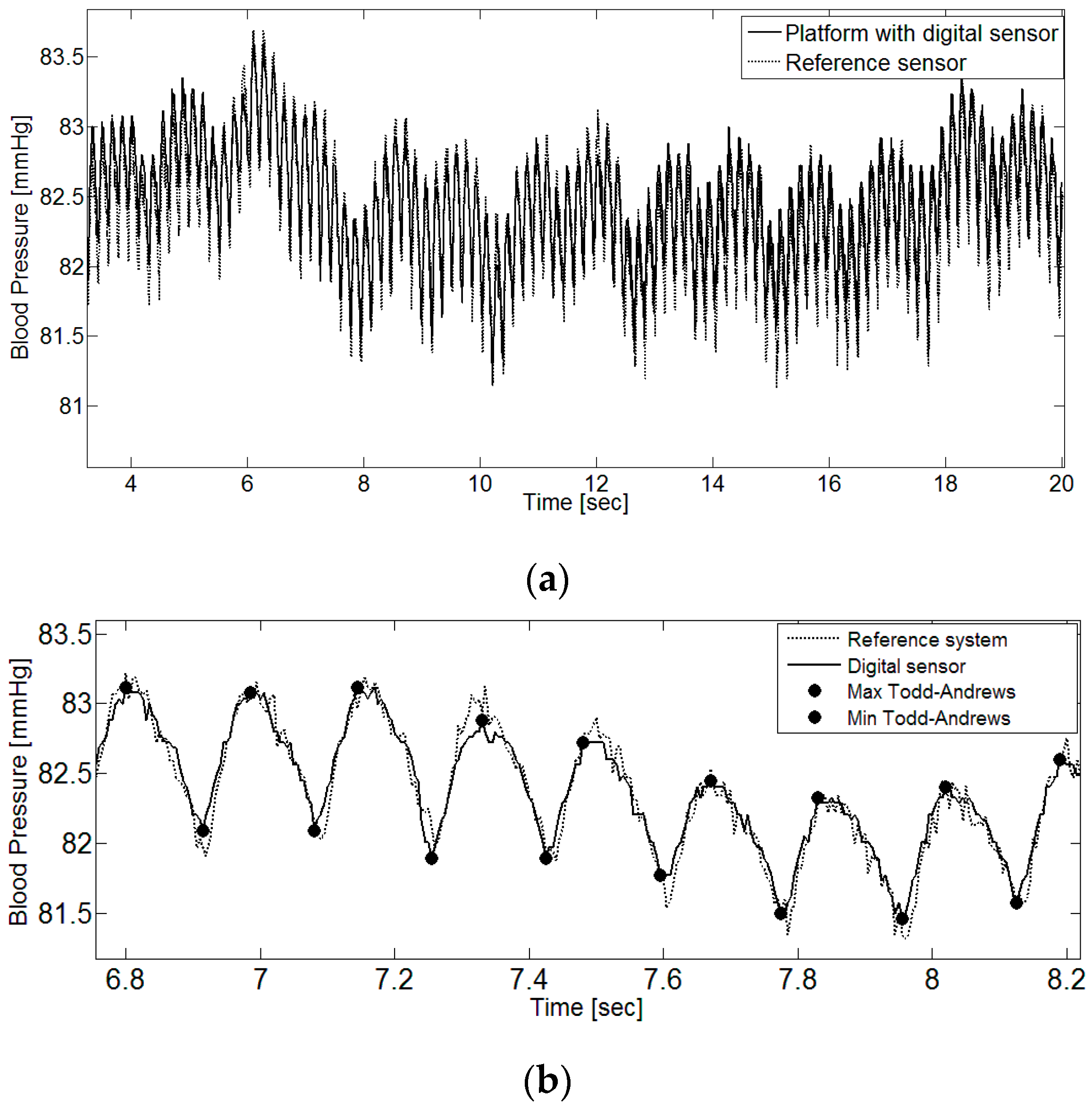
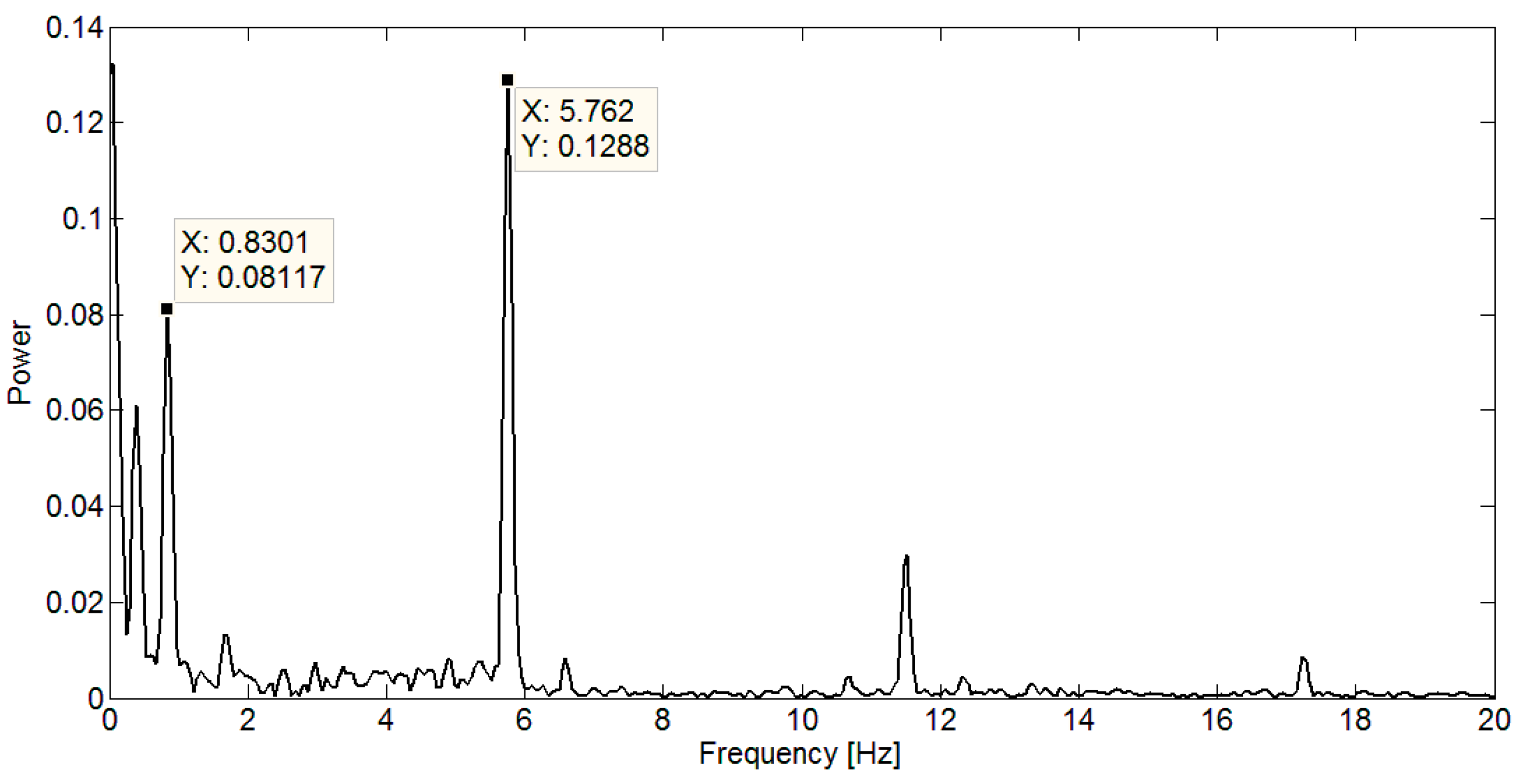
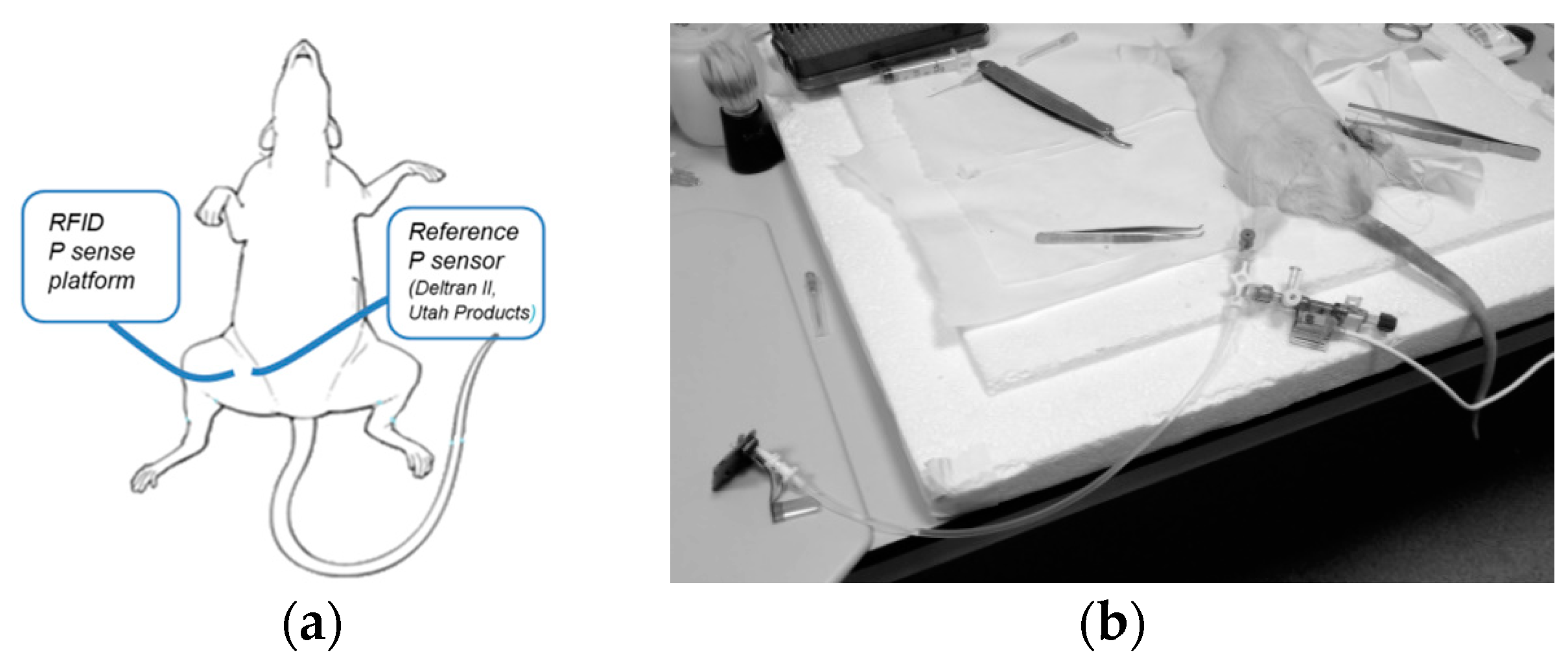
3.3. In-Vivo Tests
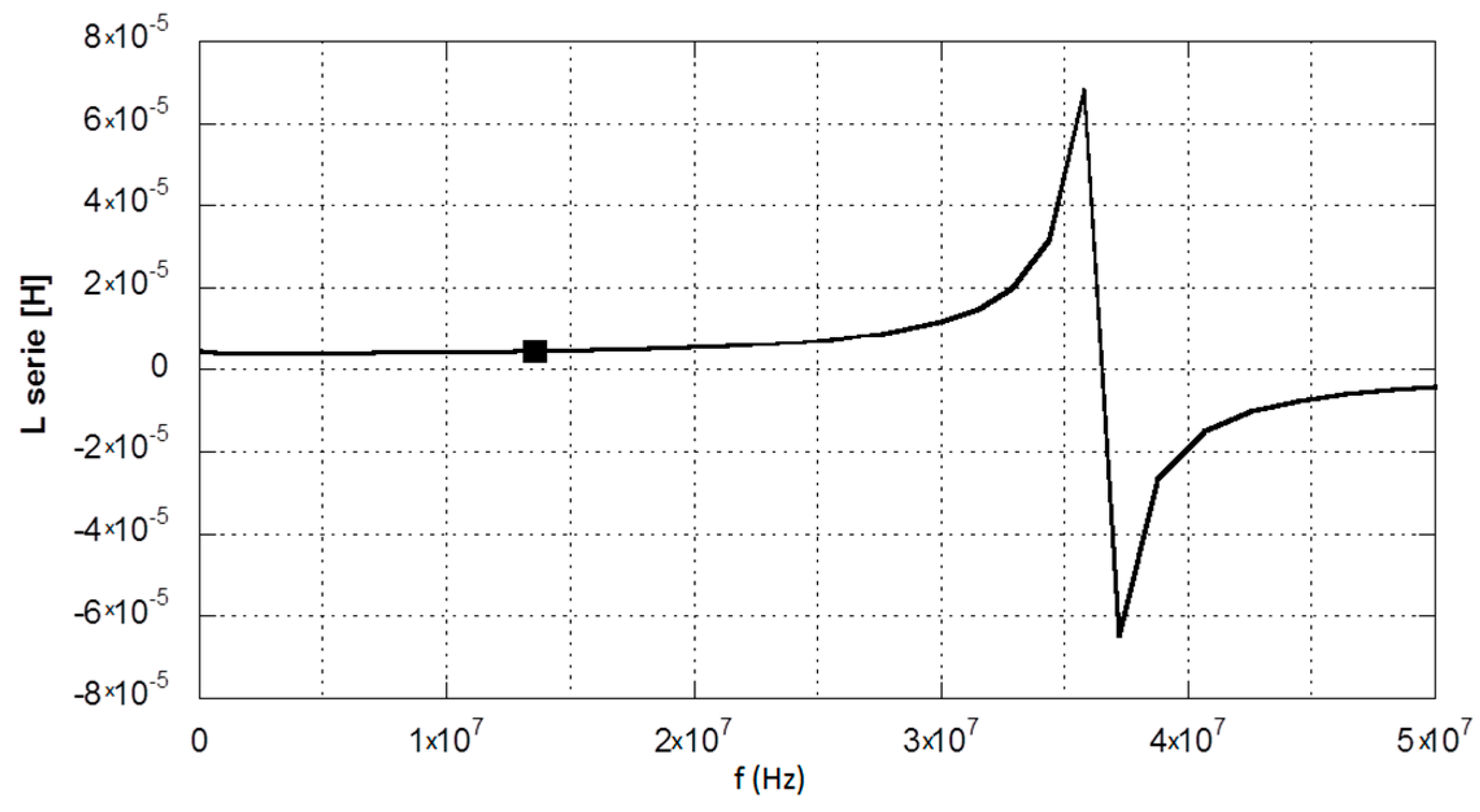
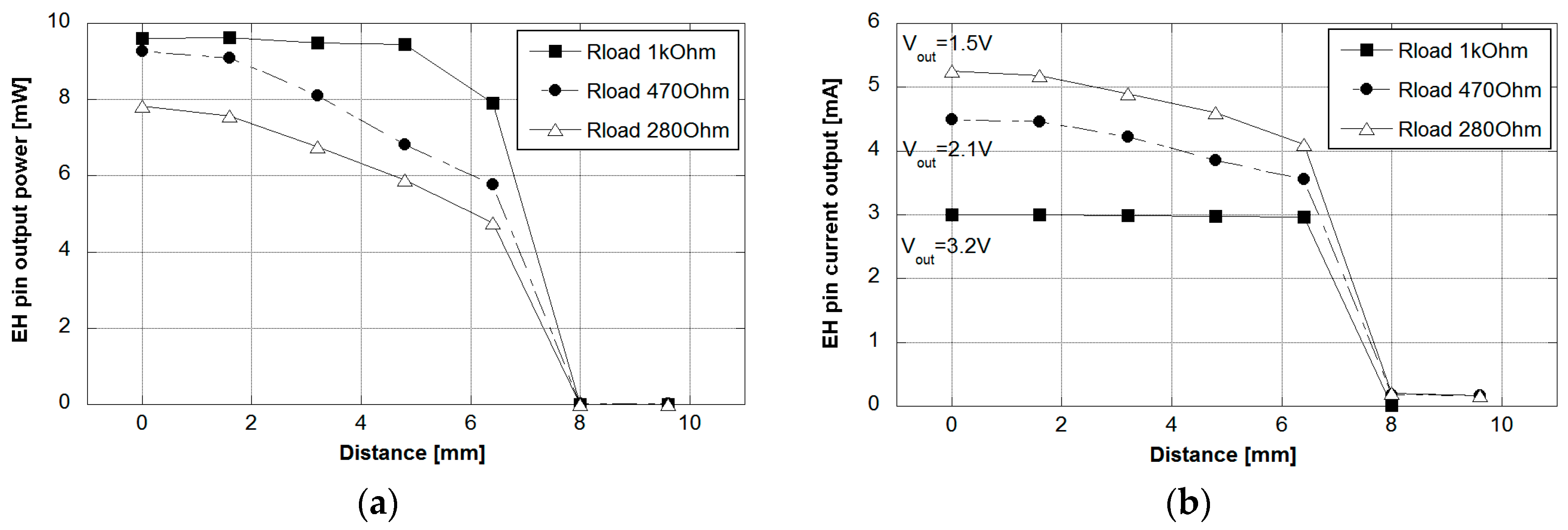
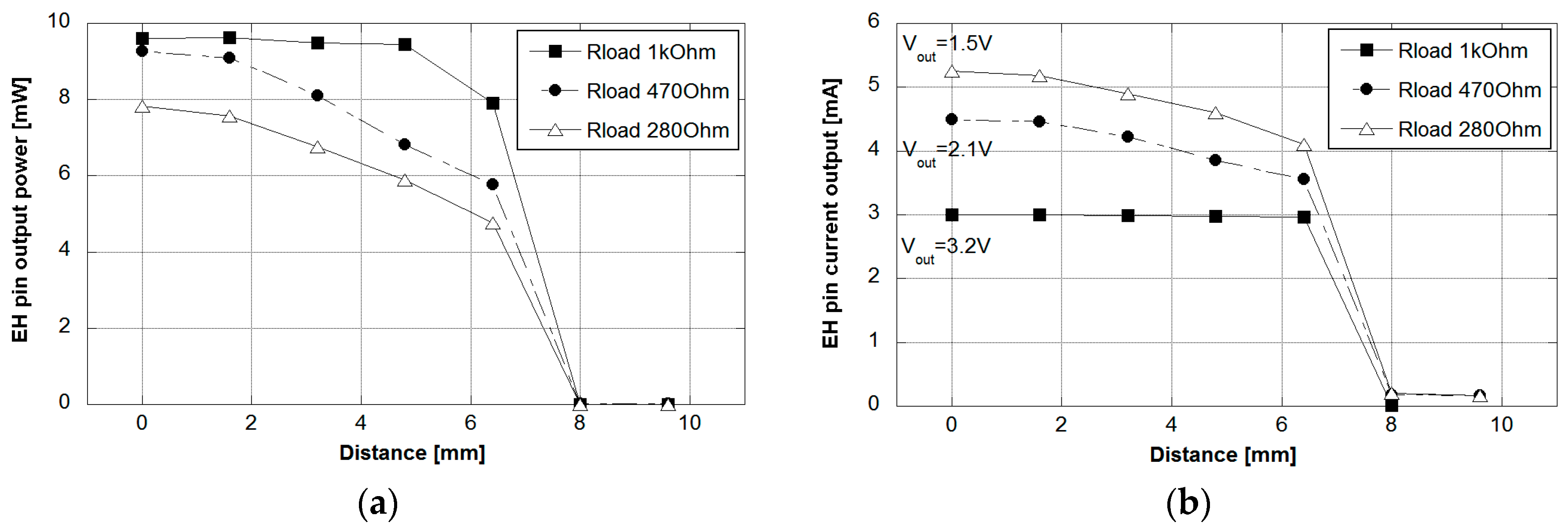
3.4. Energy Harvesting Investigation
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Braga, V.A.; Burmeister, M. Applications of Telemetry in Small Laboratory Animals for Studying Cardiovascular Diseases. In Modern Telemetry; InTech: Rijeka, Croatia, 2011. [Google Scholar]
- Rey, M.; Weber, E.W.; Hess, P.D. Simultaneous pulmonary and systemic blood pressure and ECG interval measurement in conscious, freely moving rats. J. Am. Assoc. Lab. Anim. Sci. 2012, 51, 231–238. [Google Scholar] [PubMed]
- Romain, O.; Mazeyrat, J.; Garda, P.; Talleb, H.; Lautru, D.; Wong, M.-F.; Wiart, J.; Hanna, V.F.; Lagrée, P.-Y.; Bonneau, M.; et al. ENDOCOM: Implantable wireless pressure sensor for the follow-up of abdominal aortic aneurysm stented. IRBM 2011, 32, 163–168. [Google Scholar]
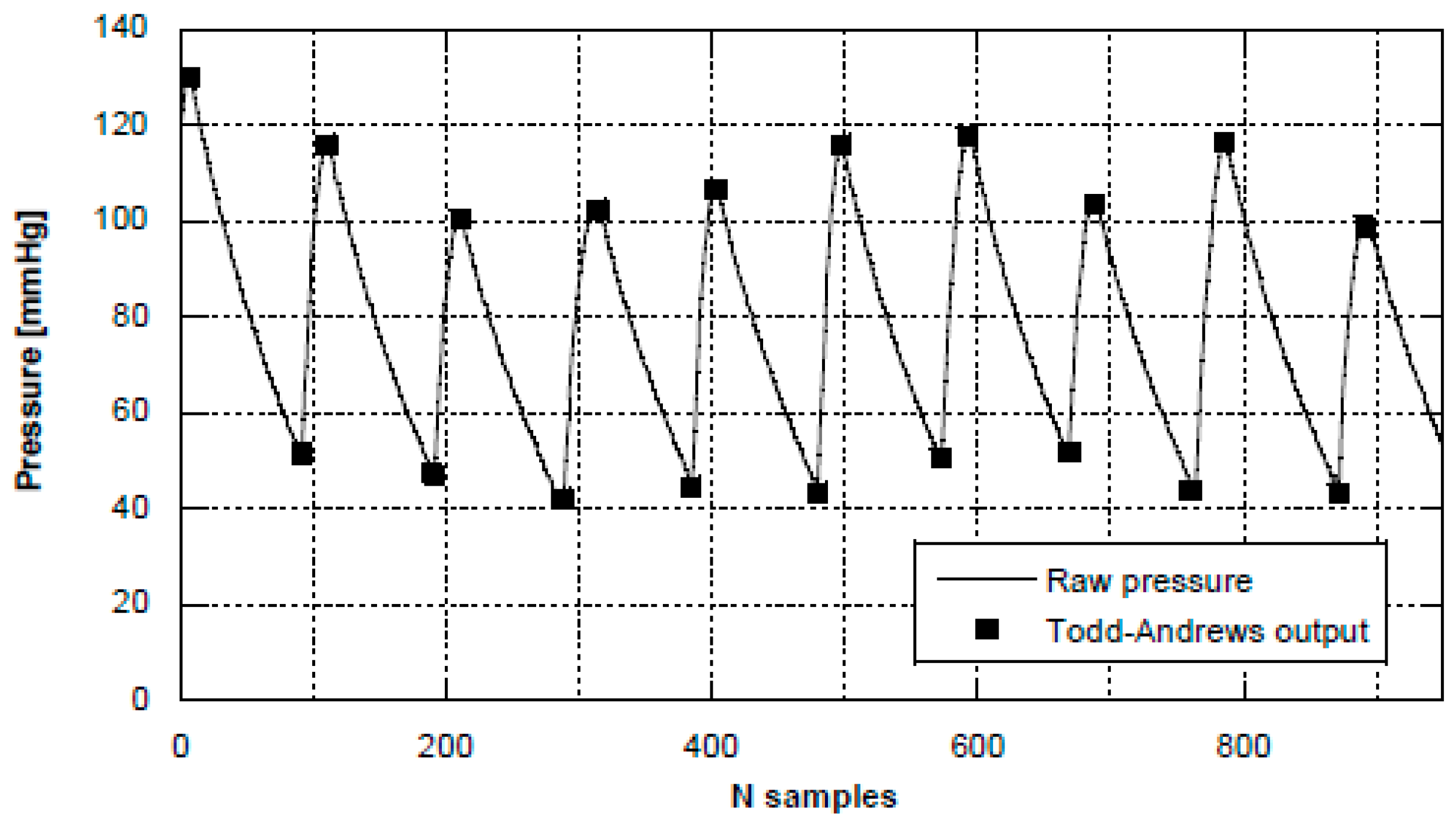
- Todd, B.S.; Andrews, D.C. The identification of peaks in physiological signal. Comput. Biomed. Res. 1998, 32, 322–335. [Google Scholar] [CrossRef] [PubMed]
- Identification Cards—Contactless Integrated Circuit Cards—Vicinity Cards—Part 2: Air Interface and Initialization; ISO/IEC 15693-2; International Organization for Standardization: Geneva, Switzerland.
- Identification Cards—Contactless Integrated Circuit(s) Cards—Vicinity Cards—Part 3: Anti-Collision and Transmission Protocol; ISO/IEC 15693-3; International Organization for Standardization: Geneva, Switzerland.
- Valdastri, P.; Menciassi, A.; Dario, P. Transmission power requirements for novel Zigbee implants in the gastrointestinal tract. IEEE Trans. Biomed. Eng. 2008, 55, 1705–1710. [Google Scholar] [CrossRef] [PubMed]
- Aubert, H. RFID technology for human implant devices. C. R. Phys. 2011, 12, 675–683. [Google Scholar] [CrossRef]
- Zhao, J. A new calculation for designing multilayer planar spiral inductors. EDN (Electr. Des. News) 2010, 55, 37–40. [Google Scholar]
- Caldara, M.; Nodari, B.; Re, V. Development of a potentially implantable pressure sensing platform with RFID interface. In Proceedings of the 2013 IEEE Sensors, Baltimore, MD, USA, 3–6 November 2013.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Use | Sensor Dimensions | Range | Resolution & Accuracy |
|---|---|---|---|---|
| DataSCI (HD-S21) | Blood pressure (small animals) | 5.9 cc; 8 gr; | −20–300 mmHg | ±3 mmHg; −0.25 mmHg/month; |
| TSE (Stellar) | Blood pressure (small animals) | 6 cc; 11 gr; 16 × 30 mm2; | 0–300 mmHg | - |
| Millar (TRM54P) | Blood pressure (small animals) | 12 gr; | −20–300 mmHg | ±2 mmHg; <4 mmHg/month |
| Mitter (G2 HR) | Heart rate (small animals) | 11 gr; 15.5 × 6.5 mm2; | 120–780 BPM | 1.5% |
| Developed system | Blood pressure (small animals) | 8 gr; 5.6cc; 30 × 17.5 × 11 mm3 | 0–300 mmHg | ±3 mmHg; |
| ENDOCOM | Blood pressure (Human) | 15 × 18.5 mm2 | - | - |
| Cardio MEMS | Blood pressure (Human) | 2 × 3.4 × 15 mm3 | - | - |
| Features | Digital Sensor | Analog Sensor |
|---|---|---|
| Pressure range | 0–260 mmHg | 0–300 mmHg |
| Dimension | 9 × 11 mm2 | 9 × 6 mm2 |
| Sensitivity | 50 counts/mmHg | 5 µV/V/mmHg |
| Accuracy | ±1.5% | ±1.5% |
| Interface | I2C | Analog differential |
| Max ODR * | 833 Hz | ADC ** sample rate |
| Supply current (at 10 V) | 1.5 mA | 1 mA |
| Features | DEVKIT-M24LR-A |
|---|---|
| Antenna dimensions | 337 × 237 mm2 |
| Operating frequency | 13.56 MHz |
| Max transmitting power | 1 W |
| Interface | I2C and RF |
| Pressure Sensor Mounted | Average Current Provided by the Battery (V = 3.7 V) | |||
|---|---|---|---|---|
| Irun (∆T = 5 s) | Isleep (∆T = 55 s) | Iaverage (∆T = 60 s) | ||
| Isensor + EEPROM | Itotal | |||
| Analog | 3.41 mA | 9.49 mA | 0.7 mA | 1.43 mA |
| Digital | 3.53 mA | 8.51 mA | 0.7 mA | 1.35 mA |
| Value | Digital Sensor | Reference Sensor | Error |
|---|---|---|---|
| Mean | 82.57 mmHg | 82.47 mmHg | 0.12% |
| Max | 83.89 mmHg | 82.69 mmHg | 1.43% |
| Min | 81.14 mmHg | 81.16 mmHg | 0.02% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caldara, M.; Nodari, B.; Re, V.; Bonandrini, B. Miniaturized Blood Pressure Telemetry System with RFID Interface. Electronics 2016, 5, 51. https://doi.org/10.3390/electronics5030051
Caldara M, Nodari B, Re V, Bonandrini B. Miniaturized Blood Pressure Telemetry System with RFID Interface. Electronics. 2016; 5(3):51. https://doi.org/10.3390/electronics5030051
Chicago/Turabian StyleCaldara, Michele, Benedetta Nodari, Valerio Re, and Barbara Bonandrini. 2016. "Miniaturized Blood Pressure Telemetry System with RFID Interface" Electronics 5, no. 3: 51. https://doi.org/10.3390/electronics5030051
APA StyleCaldara, M., Nodari, B., Re, V., & Bonandrini, B. (2016). Miniaturized Blood Pressure Telemetry System with RFID Interface. Electronics, 5(3), 51. https://doi.org/10.3390/electronics5030051