

Distributed Adaptive Formation Control for Second-Order Multi-Agent Systems Without Collisions

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- (i)
- ,
- (ii)
- for some ,
- (iii)
- , for all , and
- (iv)
- .
- (i)
- if ,
- (ii)
- if ,
- (iii)
- if ,
- (iv)
- ,
- is lower-bounded;
- is negative semi-definite;
- is uniformly continuous in time;
3. Problem Statement
- (i)
- The agents achieve the desired formation by reaching their desired positions, that is, we have the following:
- (ii)
- The agents avoid collision by remaining at a distance greater than or equal to the safety distance, d;
- (iii)
- Once the desired formation is reached, the whole pattern does not move from its current location anymore, i.e., , .
Error Dynamics
4. Control Design
4.1. Adaptive Formation Control
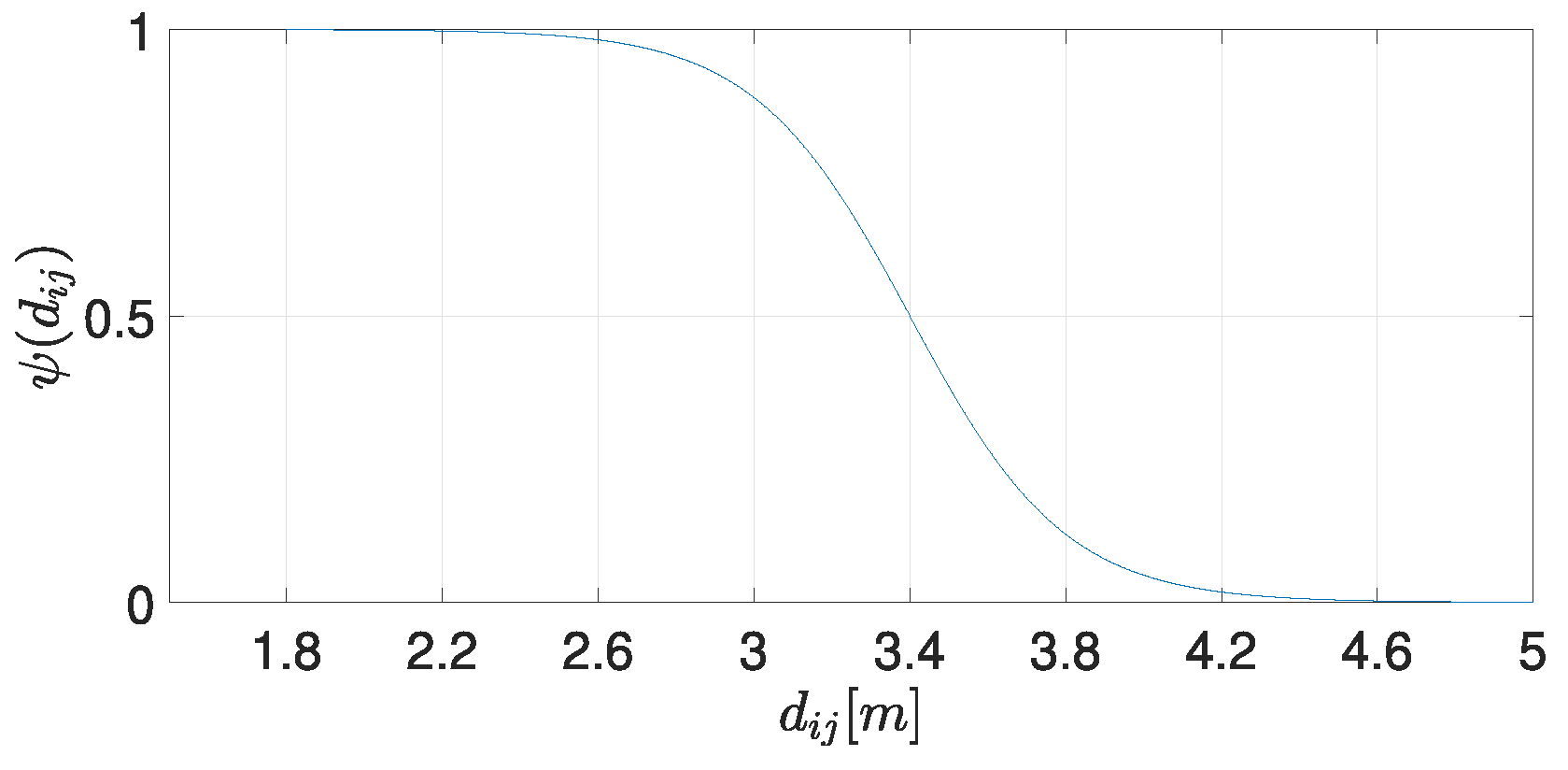
4.2. Collision Avoidance Strategy
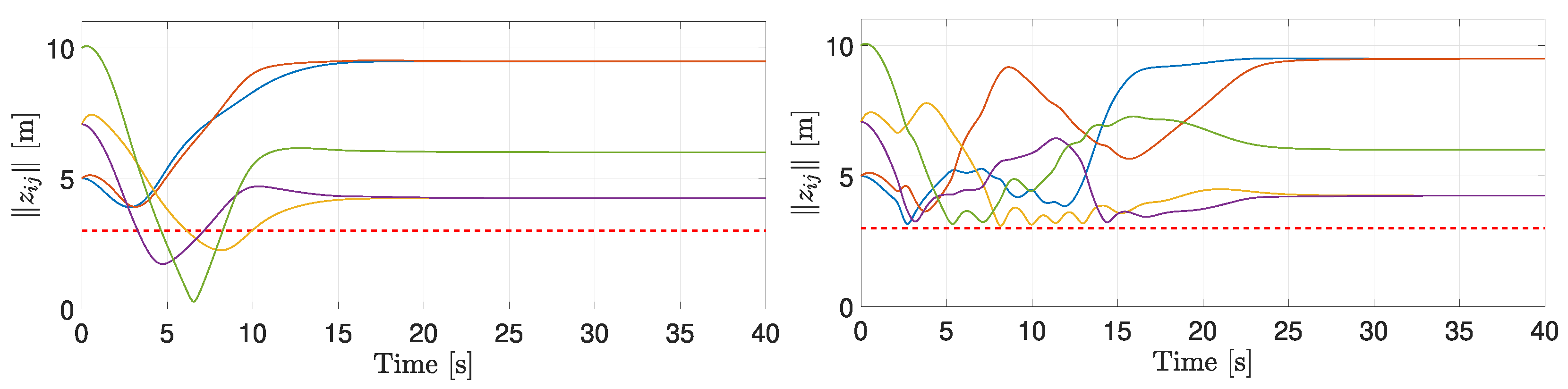
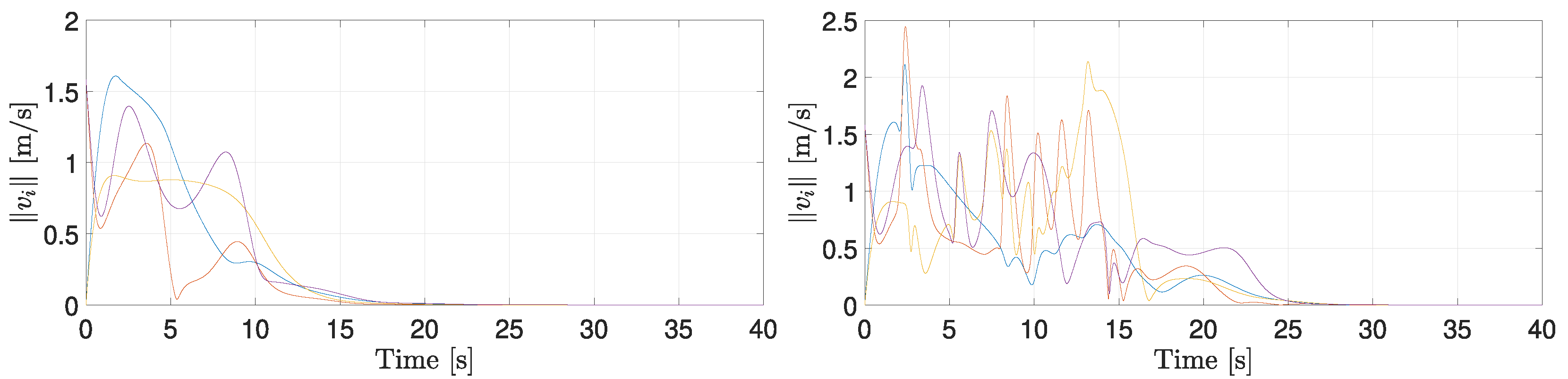
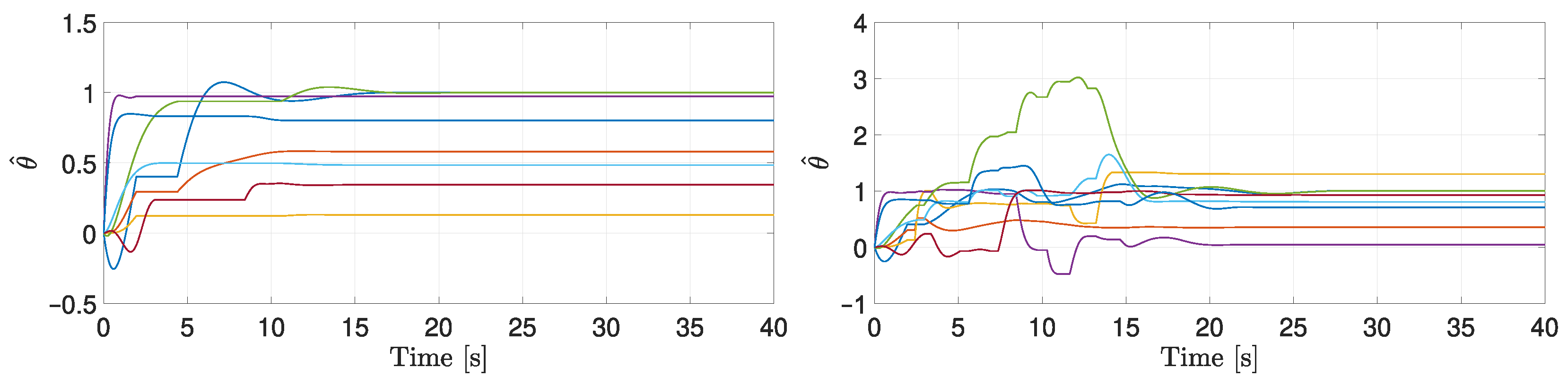
5. Simulation Results
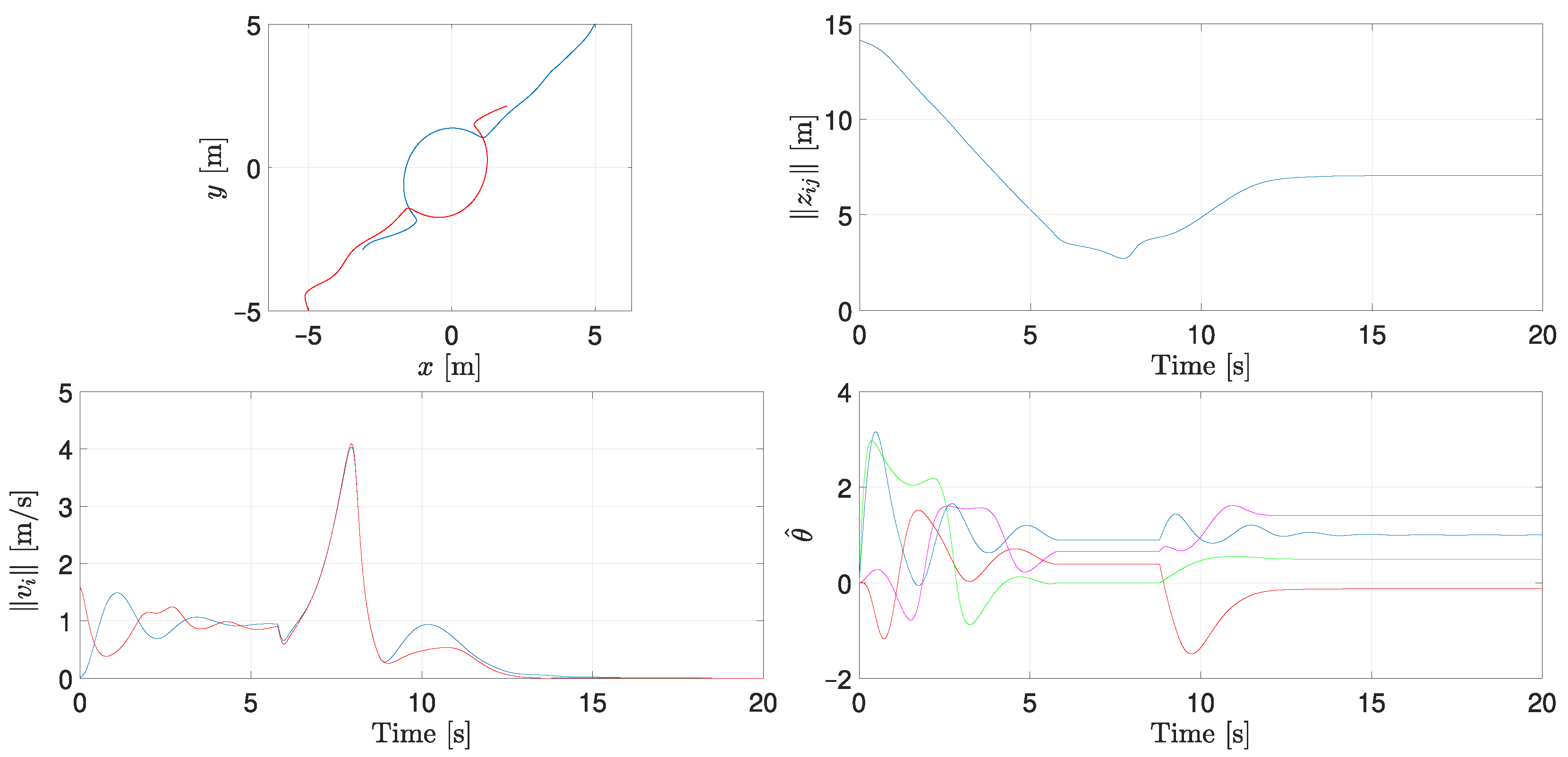
5.1. Two-Agent System with Bidirectional Communication
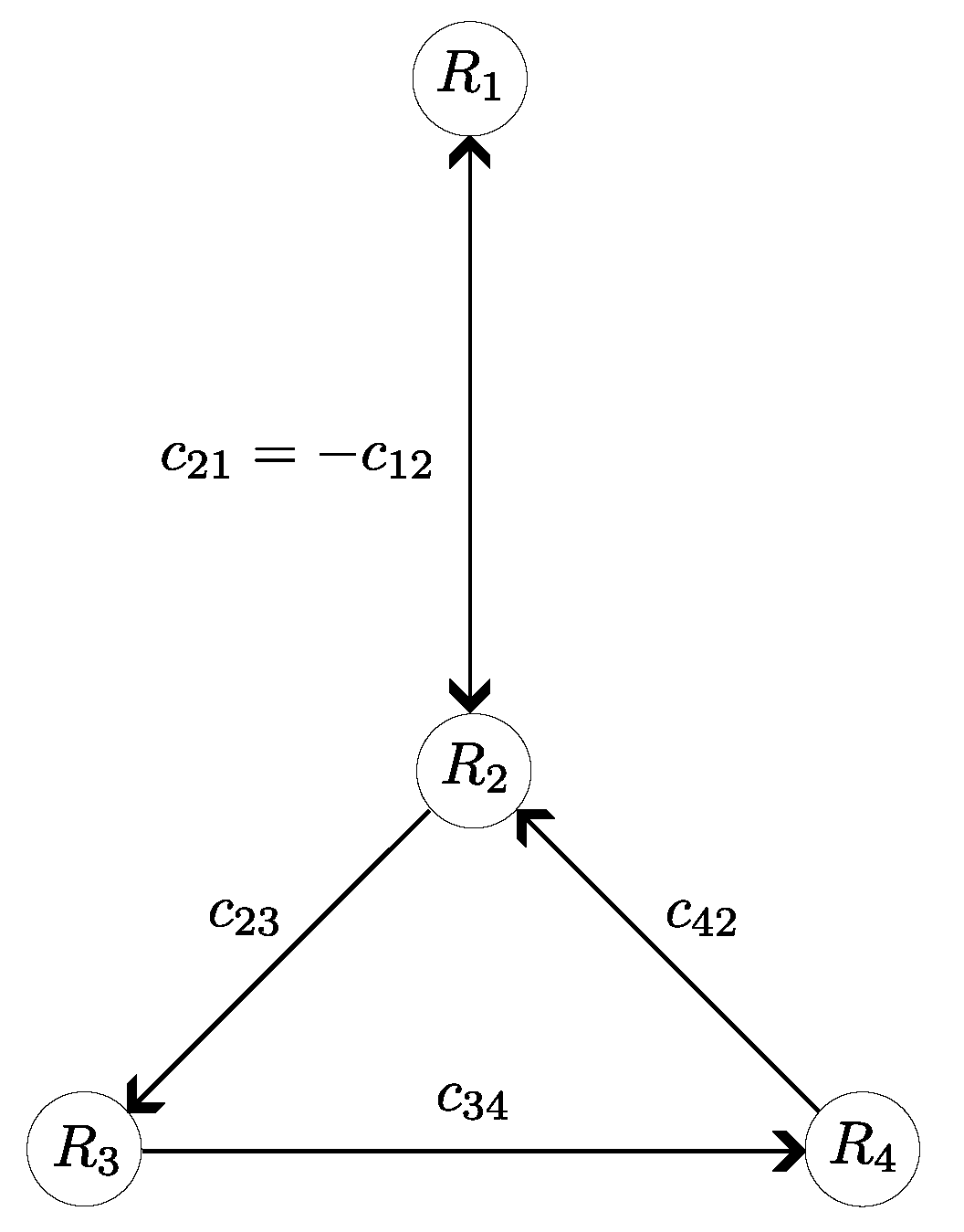
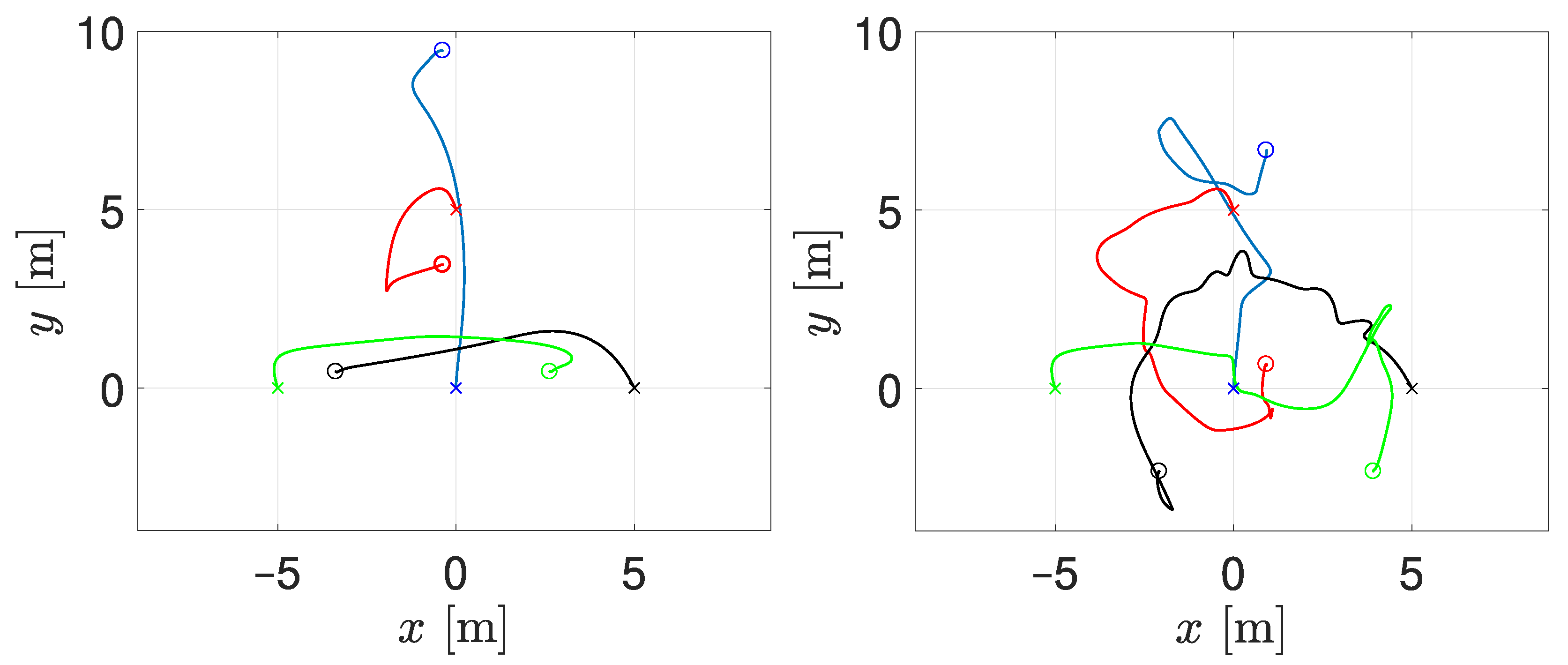
5.2. Four-Agents System with General Communication Topology
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MASs | multi-agent systems |
| ISS | input-to-state stable |
| LMI | linear matrix inequality |
References
- Jawhar, I.; Mohamed, N.; Kesserwan, N.; Al-Jaroodi, J. Networking Architectures and Protocols for Multi-Robot Systems in Agriculture 4.0. In Proceedings of the 2022 IEEE International Systems Conference (SysCon), Virtual, 25– 28 April 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, L.; Zhou, M.; Hao, K.; Han, H. Multirobot Cooperative Patrolling Strategy for Moving Objects. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 2995–3007. [Google Scholar] [CrossRef]
- Noh, D.; Choi, J.; Choi, J.; Byun, D.; Kim, Y.; Kim, H.R.; Baek, S.; Lee, S.; Myung, H. MASS: Multi-Agent Scheduling System for Intelligent Surveillance. In Proceedings of the 2022 19th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 4–6 July 2022; pp. 252–257. [Google Scholar] [CrossRef]
- Abusalama, J.; Alkharabsheh, A.R.; Momani, L.; Razali, S. Multi-Agents System for Early Disaster Detection, Evacuation and Rescuing. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Queralta, J.P.; Taipalmaa, J.; Can Pullinen, B.; Sarker, V.K.; Nguyen Gia, T.; Tenhunen, H.; Gabbouj, M.; Raitoharju, J.; Westerlund, T. Collaborative Multi-Robot Search and Rescue: Planning, Coordination, Perception, and Active Vision. IEEE Access 2020, 8, 191617–191643. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Chung, S.J.; Slotine, J.J.E. Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems. IEEE Trans. Robot. 2009, 25, 686–700. [Google Scholar] [CrossRef]
- Mastellone, S.; StipanoviÄ, D.M.; Graunke, C.R.; Intlekofer, K.A.; Spong, M.W. Formation Control and Collision Avoidance for Multi-agent Non-holonomic Systems: Theory and Experiments. Int. J. Robot. Res. 2008, 27, 107–126. [Google Scholar] [CrossRef]
- Abhijith, U.P.; Thomas, S. Cyclic Pursuit of mobile robots: A linear approach. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Kollam, India, 8–10 August 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Oh, K.K.; Park, M.C.; Ahn, H.S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Carvalho Filho, J.G.N.D.; Carvalho, E.Á.N.; Molina, L.; Freire, E.O. The Impact of Parametric Uncertainties on Mobile Robots Velocities and Pose Estimation. IEEE Access 2019, 7, 69070–69086. [Google Scholar] [CrossRef]
- Fabris, M.; Fattore, G.; Cenedese, A. Optimal time-invariant distributed formation tracking for second-order multi-agent systems. Eur. J. Control 2024, 77, 100985. [Google Scholar] [CrossRef]
- Dong, X.; Li, Q.; Wang, R.; Ren, Z. Time-varying formation control for second-order swarm systems with switching directed topologies. Inf. Sci. 2016, 369, 1–13. Available online: https://www.sciencedirect.com/science/article/pii/S0020025516303826 (accessed on 20 April 2025). [CrossRef]
- Zou, Y.; Wen, C.; Guan, M. Distributed adaptive control for distance-based formation and flocking control of multi-agent systems. IET Control Theory Appl. 2019, 13, 878–885. [Google Scholar] [CrossRef]
- Zhi, H.; Chen, L.; Li, C.; Guo, Y. Leader-Follower Affine Formation Control of Second-Order Nonlinear Uncertain Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3547–3551. [Google Scholar] [CrossRef]
- Cheng, X.; Huang, J.; Gao, T.; Wang, S.; Zhang, M. Distributed adaptive control of mobile robots with unknown parameters. In Proceedings of the 2023 35th Chinese Control and Decision Conference (CCDC), Yichang, China, 20–22 May 2023; IEEE: New York, NY, USA, 2023; Volume 5, pp. 2624–2629. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, Y.; Fu, J. Adaptive Finite-Time Optimal Formation Control for Second-Order Nonlinear Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6132–6144. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Lewis, F.L.; Wang, X. Data-Driven Optimal Formation Control for Quadrotor Team with Unknown Dynamics. IEEE Trans. Cybern. 2022, 52, 7889–7898. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Liu, H.; Wan, Y.; Lin, Z. Data-Driven Formation Control for Multiple Heterogeneous Vehicles in Air-Ground Coordination. IEEE Trans. Control Netw. Syst. 2022, 9, 1851–1862. [Google Scholar] [CrossRef]
- Parlangeli, G. Data-Driven Formation Control for Multi-Vehicle Systems Induced by Leader Motion. Algorithms 2024, 17, 514. [Google Scholar] [CrossRef]
- Golmisheh, F.M.; Shamaghdari, S. Data-Driven Inverse Reinforcement Learning for Heterogeneous Optimal Robust Formation Control. IEEE Trans. Cybern. 2025, 55, 2024–2037. [Google Scholar] [CrossRef]
- Yu, M.; Wang, H.; Xie, G.; Jin, K. Event-triggered circle formation control for second-order-agent system. Neurocomputing 2018, 275, 462–469. [Google Scholar] [CrossRef]
- Wang, X.; Sun, S.; Xiao, F.; Yu, M. Dynamic event-triggered formation control of second-order nonholonomic systems. J. Syst. Eng. Electron. 2023, 34, 501–514. [Google Scholar] [CrossRef]
- Li, Y.; Qu, F.; Tong, S. Observer-Based Fuzzy Adaptive Finite-Time Containment Control of Nonlinear Multiagent Systems with Input Delay. IEEE Trans. Cybern. 2021, 51, 126–137. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, J.; Tong, S. Fuzzy Adaptive Optimized Leader-Following Formation Control for Second-Order Stochastic Multiagent Systems. IEEE Trans. Ind. Inform. 2022, 18, 6026–6037. [Google Scholar] [CrossRef]
- Lan, J.; Liu, Y.J.; Xu, T.; Tong, S.; Liu, L. Adaptive Fuzzy Fast Finite-Time Formation Control for Second-Order MASs Based on Capability Boundaries of Agents. IEEE Trans. Fuzzy Syst. 2022, 30, 3905–3917. [Google Scholar] [CrossRef]
- Wu, W.; Li, Y.; Tong, S. Neural Network Output-Feedback Consensus Fault-Tolerant Control for Nonlinear Multiagent Systems with Intermittent Actuator Faults. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 4728–4740. [Google Scholar] [CrossRef] [PubMed]
- Mondal, A.; Bhowmick, C.; Behera, L.; Jamshidi, M. Trajectory Tracking by Multiple Agents in Formation with Collision Avoidance and Connectivity Assurance. IEEE Syst. J. 2018, 12, 2449–2460. [Google Scholar] [CrossRef]
- Pang, Z.H.; Zheng, C.B.; Sun, J.; Han, Q.L.; Liu, G.P. Distance- And velocity-based collision avoidance for time-varying formation control of second-order multi-agent systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 1253–1257. [Google Scholar] [CrossRef]
- Mu, C.; Peng, J. Learning-Based Cooperative Multiagent Formation Control with Collision Avoidance. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7341–7352. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Q.; Tan, H.; Shen, Z.; Wu, D. Collision-Free and Connectivity-Preserving Formation Control of Nonlinear Multi-Agent Systems with External Disturbances. IEEE Trans. Veh. Technol. 2023, 72, 9956–9968. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, C.; Guo, J.; Chadli, M.; Xiang, Z. Adaptive Formation Control for Unmanned Aerial Vehicles with Collision Avoidance and Switching Communication Network. IEEE Trans. Fuzzy Syst. 2024, 32, 1435–1445. [Google Scholar] [CrossRef]
- Catellani, M.; Sabattini, L. Distributed Control of a Limited Angular Field-of-View Multi-Robot System in Communication-Denied Scenarios: A Probabilistic Approach. IEEE Robot. Autom. Lett. 2024, 9, 739–746. [Google Scholar] [CrossRef]
- Palani, T.; Fukushima, H.; Izuhara, S. Collision Avoidance Control for Distributed Multi-Robot Systems Using Collision Cones and CBF-Based Constraints. In Proceedings of the 2024 IEEE Conference on Control Technology and Applications (CCTA), Newcastle upon Tyne, UK, 21–23 August 2024; pp. 787–792. [Google Scholar] [CrossRef]
- Tang, J.; Lao, S.; Wan, Y. Systematic Review of Collision-Avoidance Approaches for Unmanned Aerial Vehicles. IEEE Syst. J. 2022, 16, 4356–4367. [Google Scholar] [CrossRef]
- Kot, R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics 2022, 11, 2301. [Google Scholar] [CrossRef]
- Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Slotine, J.; Li, W. Applied Nonlinear Control; Prentice-Hall International Editions; Prentice-Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Flores-Resendiz, J.F.; Aranda-Bricaire, E. A General Solution to the Formation Control Problem Without Collisions for First-Order Multi-Agent Systems. Robotica 2020, 38, 1123–1137. [Google Scholar] [CrossRef]
- Flores-Resendiz, J.F.; Avilés, D.; Aranda-Bricaire, E. Formation Control for Second-Order Multi-Agent Systems with Collision Avoidance. Machines 2023, 11, 208. [Google Scholar] [CrossRef]
- Flores-Resendiz, J.F.; Aranda-Bricaire, E.; González-Sierra, J.; Santiaguillo-Salinas, J. Finite-Time Formation Control without Collisions for Multiagent Systems with Communication Graphs Composed of Cyclic Paths. Math. Probl. Eng. 2015, 2015, 948086. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Flores-Resendiz, J.F.; Aviles-Velazquez, J.D.; Marquez, C.; Martinez-Clark, R.; Rojas-Ruiz, M.A. Distributed Adaptive Formation Control for Second-Order Multi-Agent Systems Without Collisions. Electronics 2025, 14, 1751. https://doi.org/10.3390/electronics14091751
Flores-Resendiz JF, Aviles-Velazquez JD, Marquez C, Martinez-Clark R, Rojas-Ruiz MA. Distributed Adaptive Formation Control for Second-Order Multi-Agent Systems Without Collisions. Electronics. 2025; 14(9):1751. https://doi.org/10.3390/electronics14091751
Chicago/Turabian StyleFlores-Resendiz, Juan Francisco, Jesus David Aviles-Velazquez, Claudia Marquez, Rigoberto Martinez-Clark, and Maria Alejandra Rojas-Ruiz. 2025. "Distributed Adaptive Formation Control for Second-Order Multi-Agent Systems Without Collisions" Electronics 14, no. 9: 1751. https://doi.org/10.3390/electronics14091751
APA StyleFlores-Resendiz, J. F., Aviles-Velazquez, J. D., Marquez, C., Martinez-Clark, R., & Rojas-Ruiz, M. A. (2025). Distributed Adaptive Formation Control for Second-Order Multi-Agent Systems Without Collisions. Electronics, 14(9), 1751. https://doi.org/10.3390/electronics14091751