1. Introduction
In today’s digitally connected world, systems and applications must be able to communicate seamlessly to enable data and information exchange. Different systems and applications can function together if interoperability is established between them. Interoperability can be analyzed from multiple perspectives, i.e., technical, semantic, and syntactic approaches. Semantic interoperability refers to the capacity of different information systems to share and understand data, based on mutually accepted definitions and protocols, i.e., ensuring that data meaning is consistently interpreted across systems [
1,
2]. In this paper, we are particularly interested in semantic interoperability within the maritime domain. In globalized maritime transport, vessels communicate with various digital infrastructures and pass through multiple jurisdictions. Therefore, semantic interoperability is essential for optimization and ensuring operational continuity. Stakeholders such as ports, shipping operators, regulatory authorities, logistics providers, and insurance entities must be able to exchange information in a manner that preserves its semantic integrity and operational relevance. For example, vessel traffic services (VTS) must interpret heterogeneous data sources to maintain safe and efficient navigation. In an environment where many tasks are managed by autonomous systems, e.g., within smart ports or in situations when vessels are autonomous, semantic interoperability becomes especially important. Additionally, other aspects such as maritime safety, the reduction of harmful gas emissions, and the enhancement of energy efficiency should be considered when analyzing semantic interoperability requirements.
Multi-agent systems in autonomous maritime domains incorporate various autonomous entities, including autonomous ships, unmanned surface vehicles (USVs), port management systems, and communication networks. These systems must interact dynamically, exchanging structured and unstructured data in real time to enable operations such as efficient navigation, collision avoidance, environmental monitoring, and emergency response.
In the context of multi-agent maritime systems, semantic interoperability serves as a foundational enabler for a wide range of critical processes by ensuring that autonomous entities interpret and utilize shared information consistently. Its role is particularly evident in the following key areas:
Situational awareness: autonomous vessels, port infrastructures, and maritime authorities are able to exchange real-time navigational data, meteorological conditions, and hazard warnings through semantically standardized formats, thereby enhancing collective awareness and operational responsiveness [
3].
Optimized decision-making: the consistent semantic representation of shared data allows agents to perform distributed analysis and coordinate responses to rapidly changing maritime environments, improving both individual and system-level decision-making [
4].
Regulatory compliance: ensuring that all autonomous systems operate in accordance with international maritime legislation and safety protocols necessitates a shared semantic framework that enables the unambiguous interpretation and implementation of regulatory requirements [
5].
Efficient logistics and port management—semantic interoperability underpins the functioning of smart ports by enabling seamless coordination in areas such as cargo allocation, vessel berthing, and integrated supply chain optimization [
6].
Achieving semantic interoperability in maritime domains entails addressing a number of domain-specific challenges that arise from the complexity, heterogeneity, and global nature of maritime systems. These challenges span technical, organizational, and regulatory dimensions and must be systematically resolved to enable the reliable and scalable integration of agents across diverse operational contexts. Some of the key challenges include:
Different standards and protocols: the maritime sector relies on a variety of data exchange systems, such as the electronic chart display and information system (ECDIS) and others. However, the lack of a unified semantic framework across these standards makes consistent data integration and interpretation difficult [
7].
Regulatory differences: different countries and international bodies enforce their own sets of maritime regulations. This variation often leads to inconsistencies in terminology, definitions, and how data are interpreted across jurisdictions [
8].
Complexity and lack of maritime data standardization: maritime operations produce large and diverse data streams e.g., sensor readings, navigational data, environmental data, and legal documents. A major challenge is how to define a universally accepted semantic structure capable of encompassing the diversity and complexity of data [
9].
Advancements in maritime technologies: as new technologies emerge, novel data types and formats are introduced; however, older systems are often unable to interpret or handle this information properly, resulting in interoperability challenges [
10].
Contextual variations in terminology: the same maritime terms may carry different meanings, depending on geographic region, organizational context, or operational practice. For example, the term “pilotage” can imply different procedures in different ports, leading to potential misunderstandings [
11].
Cybersecurity and trust in data: in a setting where autonomous systems depend on continuous data exchange, ensuring the integrity and security of transmitted information is critical. Any compromise in data authenticity can undermine both operational safety and trust between systems [
12].
There are several ongoing activities aimed at enhancing interoperability within the maritime domain. These include the e-Navigation Strategy by the International Maritime Organization (IMO), the AUTOSHIP project funded by the European Union, and the S-100 framework developed by the International Hydrographic Organization (IHO) [
13,
14,
15].
The e-Navigation Strategy aims to improve the safety, efficiency, and sustainability of maritime navigation by integrating and harmonizing navigation systems and improving digital communication between vessels and shore-based infrastructure. Its primary focus is on achieving system-level interoperability, rather than addressing the dynamics of multi-agent architectures.
The AUTOSHIP project explores the deployment of advanced technologies such as automated navigation, collision avoidance, and remote monitoring. Although it does not specifically address multi-agent coordination, the project contributes significantly to the development of interoperable and autonomous functionalities within individual vessels and their interaction with shore-based systems.
A comparable approach is evident in the S-100 initiative, which was launched somewhat earlier and has since led to the establishment of a standardized framework by the International Hydrographic Organization. The S-100 standard is designed to support interoperability across a wide range of maritime systems by facilitating the exchange of navigational and environmental data, thereby enabling more consistent and reliable maritime operations.
While the e-Navigation and AUTOSHIP initiatives and the S-100 framework have significantly contributed to the advancement of digital infrastructure and interoperability in maritime operations, they remain primarily focused on system-level integration, syntactic standardization, and technical harmonization. The e-Navigation strategy emphasizes vessel-to-shore communication and centralized data services but lacks support for decentralized multi-agent coordination. The AUTOSHIP project advances automation at the level of individual vessels, yet it does not address semantic-level collaboration or interoperability among distributed agents. Similarly, S-100 provides a standardized framework for hydrographic and navigational data exchange but does not incorporate ontology-based reasoning, runtime semantic alignment, or support for adaptive decision-making by autonomous agents. In contrast, the framework proposed in this paper introduces a multilayered ontology-driven model that is specifically designed to support semantic interoperability among heterogeneous agents. By embedding formal semantics and inference mechanisms into agent interaction protocols, this system enables context-aware coordination, dynamic response, and scalable integration across vessels, ports, and infrastructure components.
The next section discusses the role of multi-agent systems in autonomous maritime domains, followed by a section presenting an overview of research that utilizes multi-agent systems to enhance fire protection on autonomous vessels. In addition, the section introduces an ontology-based semantic interoperability model that was specifically developed to support fire detection, response, and control systems in autonomous ship operations.
3. Framework for Semantic Interoperability
The interoperability model described in this paper is based on a system developed for fire detection and suppression aboard vessels, as described in Ref. [
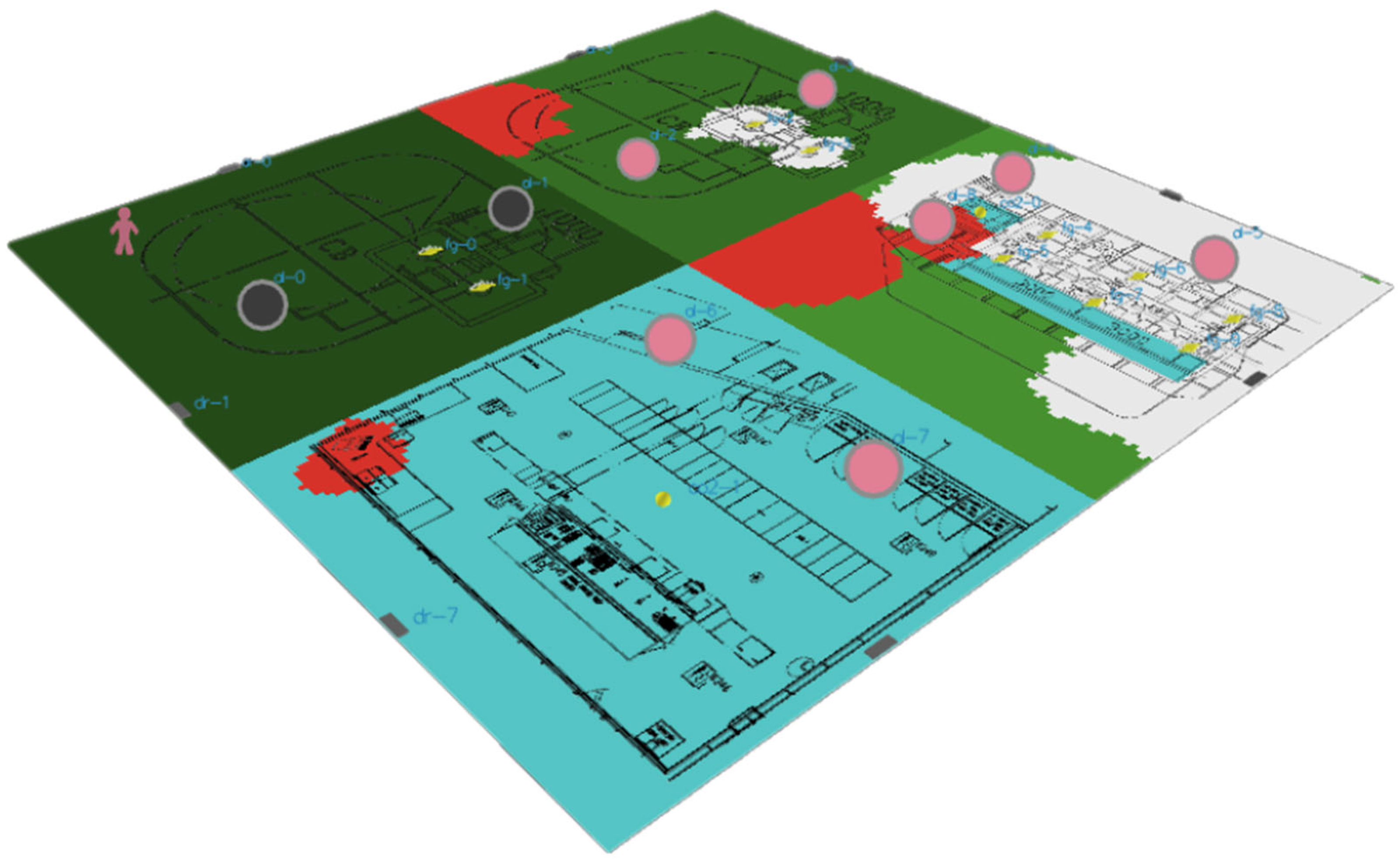
26]. This system serves as a replacement for conventional fire safety infrastructure on traditional, crewed ships. Within this new system, decision-making and operational responsibilities are delegated to intelligent agents that monitor and interact with shipboard fire safety components. The performance of the system was validated through an extensive simulation campaign analyzing 650,880 unique fire scenarios. Fires were extinguished within a timeframe ranging from 21 to 384 s post-ignition, with an average suppression time of 225 s.
Figure 3 shows a frame captured from a simulation based on real-world parameters such as fire propagation rates, the response latency of suppression mechanisms, and foam dispersion rates.
The results of the conducted simulations validate the feasibility of employing multi-agent systems as autonomous executors or advisory subsystems in maritime emergency management, thereby contributing significantly to maritime safety.
The objective of this section is to present the approach by which the developed system interfaces with external systems and shares its data, outlining the envisioned model of interoperability. To ensure interoperability with external systems, an ontology-driven approach has been adopted. An ontology tailored to the fire protection system was designed to define its essential components, promoting semantic interoperability and supporting flexible, machine-interpretable knowledge representation. A widely recognized and frequently referenced definition of ontology within computer science was articulated by Gruber [
33], who described it as an explicit specification of concepts within a particular domain. In essence, an ontology serves as a conceptual framework that supports the modeling and representation of domain-specific knowledge. The primary objective of employing ontologies is to facilitate shared understanding between humans and machines, thereby improving the interpretation and utilization of exchanged data and ensuring interoperability. Key advantages of using ontologies include:
the reduction of ambiguity in communication through the precise definition of concepts;
improved data integration across heterogeneous sources;
enhanced comprehension of the contextual meaning of data; and
more effective data retrieval by enabling the formulation of precise queries.
The application of ontologies within knowledge-based systems can be conceptualized through a three-layer architectural model. The foundational layer houses the formal languages employed for ontology definition. The intermediate layer comprises domain-specific ontologies constructed using the languages from the foundational layer. The uppermost layer contains data instances that are semantically annotated and structured according to the ontologies from the intermediate layer.
For an entity to access and utilize data described using a particular ontology, it must be capable of interpreting both the ontology itself and the language in which it is expressed. In more complex systems, data may be represented through multiple ontologies simultaneously. In such cases, full access to and semantic integration of the data is possible only for entities equipped with mechanisms for reconciling and merging the definitions across different ontologies.
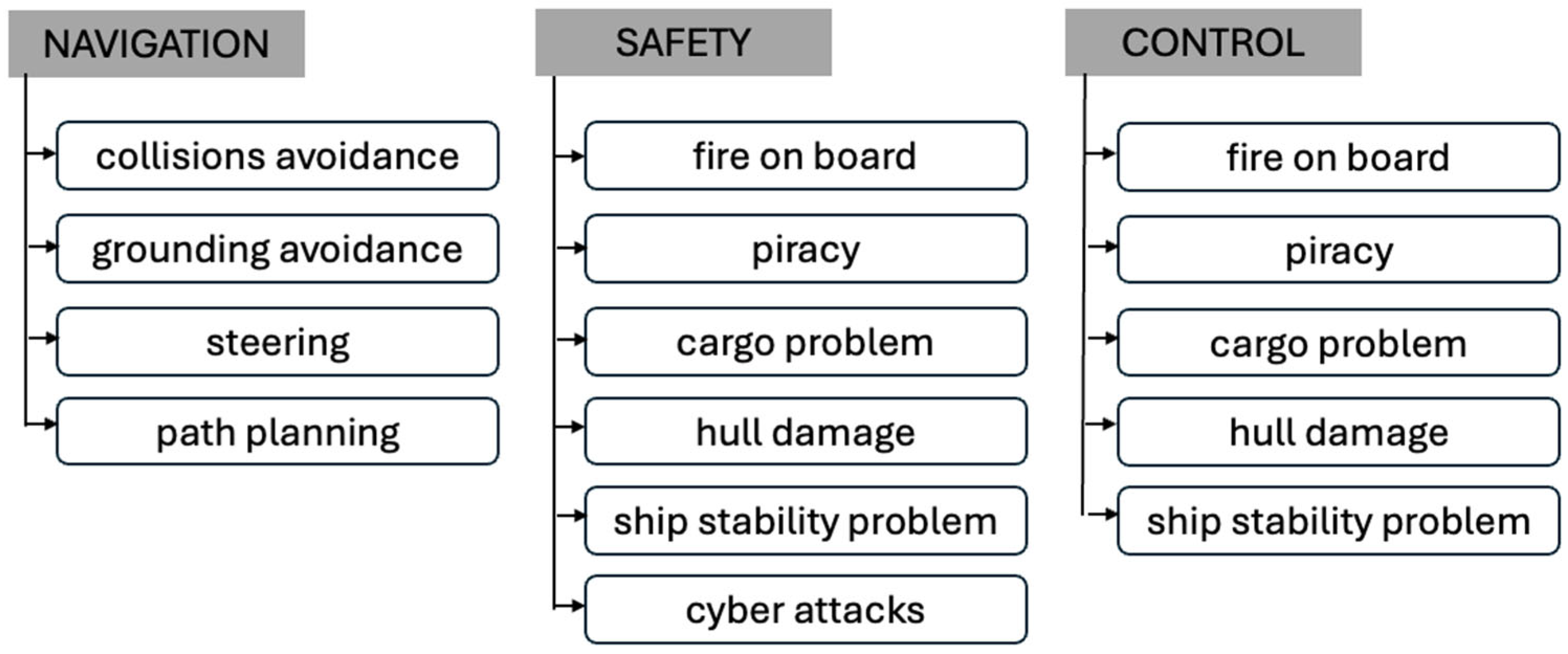
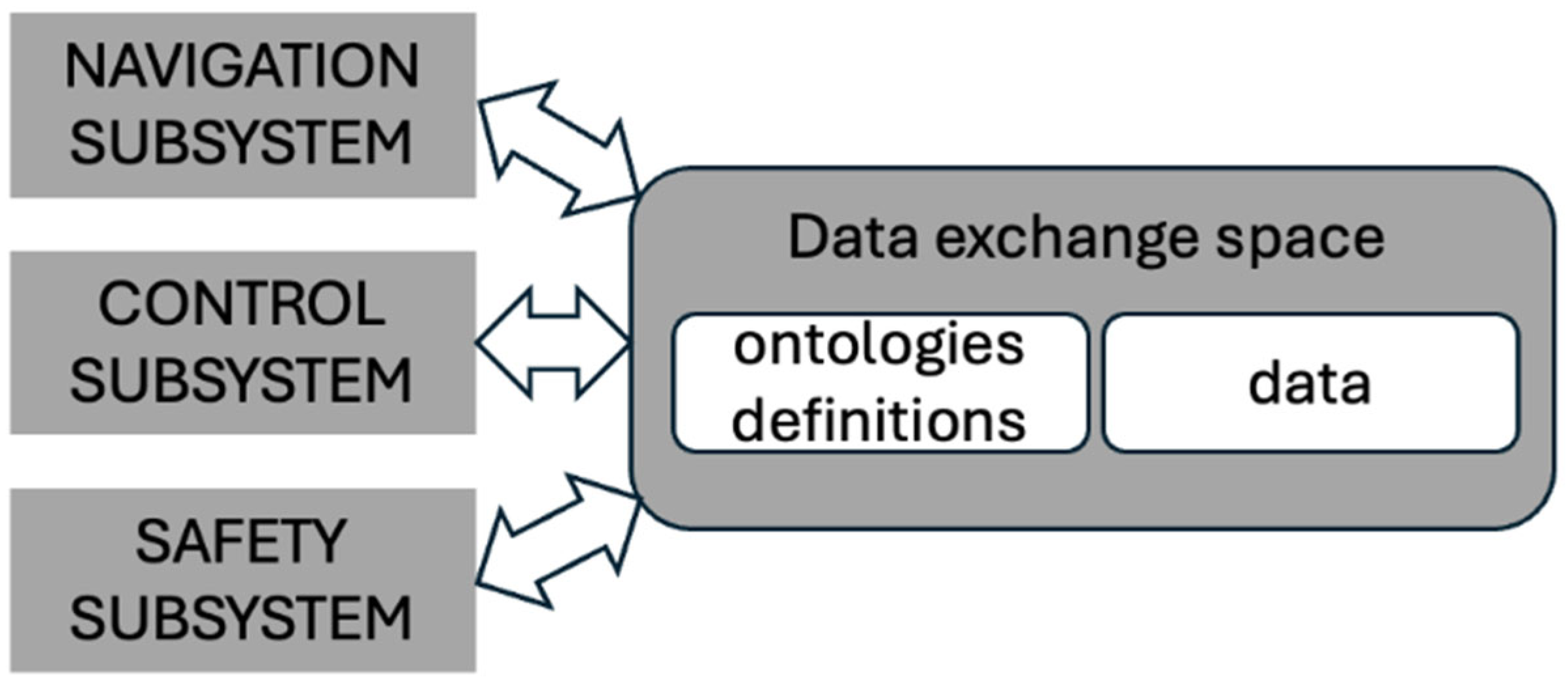
Figure 4 presents a conceptual model of ontology-based interoperability among distinct ship subsystems. The architecture includes three representative subsystems: navigation, control, and safety, each of which interacts bidirectionally with a centralized data exchange space. This shared space encapsulates two key components: ontology definitions, which provide formalized semantic structures, and data, which are annotated and interpreted according to these ontologies. Through this approach, semantic interoperability is established, enabling consistent, unambiguous communication and facilitating coordinated decision-making processes across the vessel’s digital infrastructure.
To ensure the long-term adaptability of the ontology framework in evolving maritime environments, ontology maintenance, and versioning procedures are incorporated into the design. The ontology is modularly constructed, which facilitates the dynamic addition of new sensor types, actuators, or control rules without disrupting existing semantic structures. Version control mechanisms track changes and ensure backward compatibility. In distributed multi-agent environments, agents periodically synchronize ontology versions via the shared data exchange space. When mismatches or undefined concepts are detected, alignment strategies are applied, such as semantic mapping or external ontology queries. This capability ensures semantic consistency during runtime and supports ontology evolution without compromising interoperability or system stability.
In practice, maritime systems are subject to continuous technological upgrades, regulatory changes, and situational variability. New equipment types, updated operational procedures, or domain-specific extensions (e.g., green shipping or cybersecurity layers) require the updating of the shared ontologies. The modular design enables localized updates, such as the addition of new actuator classes or property refinements, without requiring a full redefinition of the global schema. Each module can be versioned independently and is associated with specific agent roles or subsystems, preserving system agility.
During runtime, agents validate the incoming data and ontological assertions against their currently loaded ontology version. If discrepancies are encountered, such as unknown categories or outdated property structures, the agents initiate alignment protocols that include semantic negotiation, ontology translation layers, or fallback procedures based on previously validated rules. This ensures operations continuity, even when agents operate under temporarily inconsistent ontological views. This system balances ontological rigidity with practical flexibility, enabling it to evolve reliably across diverse operational scenarios.
Within the ship’s firefighting model, the developed ontology specifies the following fundamental components:
Structural and functional elements of the vessel pertinent to fire detection and suppression, including devices such as infrared cameras, smoke detectors, and foam generators. In the formal ontology specification, these entities are referred to as categories, denoted by the symbol Ca.
Relationships among the structural and functional elements, which represent functional, spatial, or logical connections relevant to firefighting processes. These are formally defined as relations, denoted by the symbol Re.
Attributes or properties associated with each category, capturing specific characteristics such as operational status, detection range, or activation thresholds. These are formally identified as category properties, denoted by the symbol CP.
Together, these components constitute a structured, machine-interpretable representation of the firefighting domain on board ships, enabling consistent knowledge modeling and supporting autonomous reasoning and decision-making processes. Such an ontological framework can describe the following elements:
Fire detection and suppression equipment, comprising the array of firefighting tools on board, such as extinguishers, water systems, and alarm sensors.
Emergency protocols encode procedural workflows for responding to fire incidents, including alert mechanisms, suppression strategies, evacuation pathways, and coordination with external rescue services.
These elements constitute the core knowledge used by agents to execute context-sensitive decision-making during fire emergencies.
Additional modules embedded in the ontology are:
Fire hazard classification categorizing potential ignition sources, including electrical faults, fuel leaks, and overheating machinery.
Material and substance profiles detailing the flammability and combustion characteristics of onboard materials.
Risk assessments integrating vessel layout, cargo types, and environmental conditions to inform preventive planning and resource allocation.
Formally, the ontological structure of the model is captured through the following triplet (Ca, Re, CP), where each component defines a fundamental aspect of domain representation:
is a set of categories of an area.
is a set of relationships on Ca.
is a category property set, where f is a category property name, DP is a category property domain, AV is a category property value area, and BDT is a set of basic data types.
This formal definition enables a category property to be specified either as a reference to another category within the ontology, thereby establishing hierarchical or associative relationships, or as a primitive data type such as string, integer, or Boolean data. This flexible structure supports both the modeling of complex inter-category relationships and also the inclusion of basic attribute values that are essential for system operation. Ontologies constructed following this methodology can be effectively represented as semantic networks, which offer a graphical framework for visualizing both the structural hierarchy and the relational interdependencies that are inherent in domain knowledge. Such representations facilitate better comprehension, validation, and communication of the ontological model among system designers, stakeholders, and automated reasoning agents.
Also, a selection of the pertinent properties is provided with each category, to make clear their roles and interrelations within the system. The hierarchical structure of the ontology guarantees that subcategory properties are inherited from parent categories, which ensures semantic consistency, minimizes redundancy, and is conducive to more effective knowledge management and inference processes. This mechanism of inheritance is especially useful in multi-agent systems of complexity, where the uniform interpretation of properties across affiliated categories is essential for interoperability, as well as for coordinated decision-making.
Figure 5 illustrates an abstract conceptual model of the created ontology, with an emphasis on its hierarchical structure and the semantic connections between principal components. At the foundation of the ontology is the general category “Elements of environment”, which includes all those entities applicable to fire detection, suppression, and safety management. In the model, the element “Compartments” is established as a discrete, non-hierarchical category that is logically distinct from the main taxonomy of “Elements of environment”. Even with its autonomy in the conceptual model, “Compartments” exists as the basis of spatial representation and operational control.
Each compartment has its own autonomous agent, which is tasked with the duty of monitoring events and executing control actions in its functional area. The agents are semantically related to different physical component classes like infrared (IR) cameras, smoke detectors, and flame detectors, as well as to active suppression systems, which include foam and CO2 suppression units. The agents also communicate with a spectrum of ancillary systems: alarm modules, air and fuel valves, voltage control units, and fire-resistant doors.
All the components falling within the “Elements of environment” category inherit a standard set of basic attributes in order to provide semantic consistency and interoperability throughout the ontology. These are:
ID, a unique identifier assigned to each element;
Compartment, a reference linking the element to a specific compartment; and
X_coordinate and Y_coordinate, which are spatial metadata defining the element’s physical position.
Moreover, individual elements define specialized, function-specific properties tailored to their operational roles. For example:
Detection devices utilize the detecting_state attribute to report sensing activity;
Fire suppression actuators employ the activity property to indicate their current engagement status;
Valves, switches, and fire doors expose an open_state parameter reflecting their binary condition (open/closed); and
Fire doors additionally include the compartment_2_ID attribute to specify their connectivity with adjacent compartments, facilitating spatial reasoning and route management during fire scenarios.
This modular and semantically rich structure supports advanced reasoning, real-time monitoring, and adaptive control in intelligent fire response systems. The presented ontology is designed to represent the internal knowledge and states of the system. Although its application within the system boundaries improves internal interoperability, the primary goal remains the achievement of external interoperability. Accordingly, it is essential that both the ontology and the data it encapsulates are represented using widely accepted and standardized methodologies. To achieve this, technologies developed within the semantic web framework, specifically the RDF (resource description framework), the RDF schema, and OWL (web ontology language) have been employed.
The RDF provides a foundational model for representing information about resources on the internet through subject-predicate-object triples.
The RDF schema extends the RDF by introducing basic semantic constructs such as classes, properties, and subclass relationships, enabling the definition of lightweight ontologies.
However, for more expressive modeling, OWL is used. OWL builds on RDF and RDFS but adds richer vocabulary for describing complex relationships, class constraints, cardinalities, equivalence, and logical reasoning. Together, these standards form the core of the semantic web stack, supporting interoperability, automated inference, and intelligent data integration.
For illustrative purposes, a simplified segment of the ontology will be presented here to demonstrate the representation of data and processes within the modeled system. This example includes three core concept categories: compartments, foam generators, and infrared cameras. Each category is defined with fundamental properties such as a unique ID, while foam generators and infrared cameras also incorporate a compartment_ID attribute to establish a spatial association with a designated compartment. The operational state of infrared cameras is expressed through the detecting_state property, capturing real-time detection status, whereas foam generators utilize the activity property to indicate their suppression readiness or their active engagement. This ontological structure provides a semantic framework that supports agents in their reasoning over the current system state and when executing context-appropriate actions.
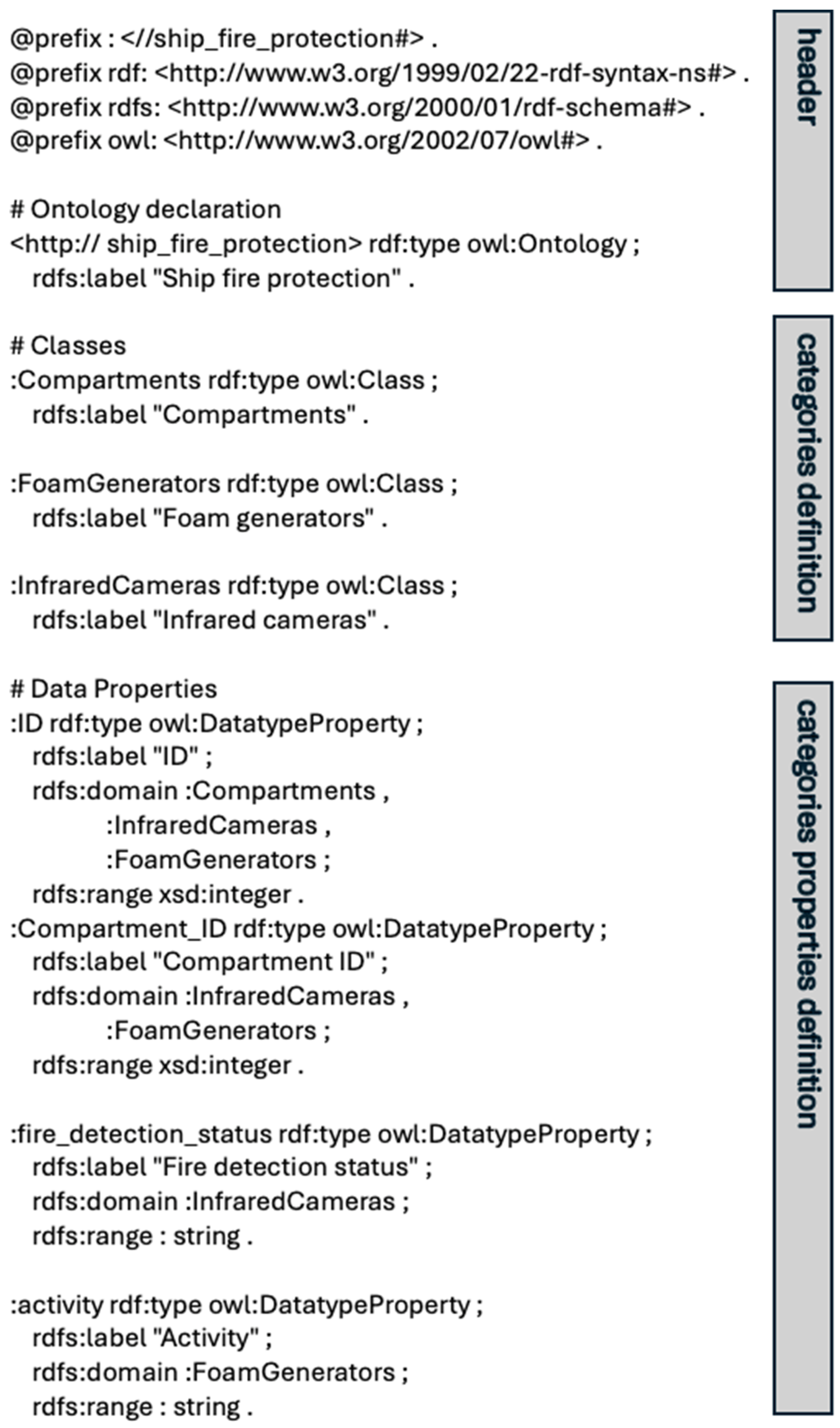
Figure 6 presents a selected excerpt from the definition of the example ontology, highlighting key structural components. The illustrated elements include the ontology header, the category definitions, and specifications of the corresponding category properties. This visual representation serves to clarify the formal structure used to model domain knowledge, demonstrating how entities and their attributes are semantically defined. While the example omits explicit value constraints for certain properties, such as permissible values for the detecting_state (e.g., fire_in_compartment), such constraints are formally specified in a complete implementation scenario.
To enable semantic reasoning, the ontology must also incorporate inference rules. A simplified example involves the automatic activation of foam suppression upon fire detection by an infrared camera. This rule is operationalized through category-level properties and can be described as follows:
- 1.
Continuously monitor the detecting_state property of all infrared camera instances.
- 2.
Upon detection of a value equal to fire_in_compartment:
- (i)
Identify the corresponding foam generator within the same compartment_ID and
- (ii)
set the activity property of the foam generator to active.
Such inference rules are integrated into a broader decision-making framework that combines additional sensor inputs and initiates more complex operational procedures, such as alarm activation, subsystem isolation, and fire containment protocols. Inference rules are specified analogously to the definition of categories and their properties, utilizing the RDF, RDF schema, and OWL.
In practical deployments, rule-based systems often encounter situations where several inference rules are triggered at the same time, potentially creating conflicts or incompatible commands. These conflicts usually occur when rules have overlapping conditions, but they recommend different responses. For instance, one rule might suggest activating a ventilation response, while another calls for closing the bulkheads in a fire zone. Without a mechanism to resolve such conflicts, these discrepancies can destabilize the system or pose safety risks. To manage this, the proposed framework uses a conflict resolution strategy that is based on rule prioritization and contextual awareness. Each rule is assigned a priority level according to factors like operational importance, regulatory guidelines, or safety considerations. When conflicts arise, the system uses these priority levels to decide which rule takes precedence. It also evaluates contextual factors such as the severity of the fire, the condition of the compartment, sensor accuracy, and the urgency of the situation to deactivate lower-priority or irrelevant rules. For example, if a compartment’s temperature exceeds a set threshold, a foam suppression rule could override a ventilation command.
At a technical level, the system operates with a runtime rule agenda that queues all active rules and applies both predefined priorities and real-time filters to determine which ones should be executed. This design ensures that agents behave coherently, even in complex, asynchronous scenarios. In cases where the rules are interdependent, the framework introduces extra safeguards like mutual exclusion rules, prerequisite checks, or timing constraints to prevent unsafe outcomes.
The developed ontology adopts a three-layer architectural model, which provides a modular and semantically robust framework for knowledge representation and reasoning in intelligent fire safety systems. This architecture promotes clear conceptual and functional separations among the different aspects of the ontological system, namely, syntactic representation, semantic modeling, and data instantiation.
At the lowest level, the representation layer handles the syntactic encoding of ontological structures using standardized technologies such as the RDF, RDF schema, and OWL. These languages enable the ontology to be expressed in a machine-readable format, ensuring compatibility across platforms and tools. The RDF and RDF schema provide the triple-based model used for describing resources, while OWL extends this with formal semantics for expressing complex relationships, constraints, and logic-based inference.
The middle layer of the architecture is the ontology or knowledge layer, which describes the fundamental conceptual model of the domain. It consists of the declaration of categories (e.g., compartments, infrared cameras, and foam generators), object and data properties (e.g., hasSensor, detecting_state, and compartment_ID), and hierarchical relations. It also includes the ability to specify the axioms and constraints necessary for semantic reasoning, consistency checking, and automatically making decisions. It encloses the logic of the domain and gives a common vocabulary to agents and systems that interact with this ontology.
At the highest level, the data layer consists of instances (individuals) of the specified categories. These instances are physical entities and events in the modeled world; for example, a particular compartment, an IR camera, and a foam generator. The data layer reflects the real-time or scenario-specific state of the system and serves as the substrate over which the inference rules operate.
By adhering to this three-tier structure, this ontology achieves several key advantages:
- (1)
Modularity, enabling the independent development and maintenance of each layer;
- (2)
Scalability, allowing the ontology to accommodate increasingly complex system components and interactions;
- (3)
Semantic interoperability, ensuring consistent understanding and interpretation of data across heterogeneous systems;
- (4)
Support for automated reasoning, through formal logic embedded in the ontology and expressed via OWL semantics.
This architecture not only enhances the clarity and maintainability of the ontology but also provides a solid foundation for integrating it into multi-agent frameworks.
Figure 7 presents an expanded view of the framework initially introduced in
Figure 4, offering a more detailed representation of the components and interactions that support semantic interoperability. In this model, each vessel is equipped with its own data exchange space, a dedicated environment in which the ontologies representing its subsystems are stored, alongside the data instantiated according to those ontologies. This structure allows for the formalization, organization, and sharing of both static and dynamic knowledge, which is essential to vessel operations.
Similarly, other key stakeholders within the maritime domain, including smart ports, shipping companies, regulatory maritime authorities, and additional actors, maintain their own data exchange spaces. These entities are depicted in the figure as integral components of a distributed, semantically interoperable network. Within this network, the multi-agent systems deployed by each stakeholder can exchange information and collaborate effectively, while adhering to established security and data protection standards. The model enables horizontal communication among peer agents (e.g., between the ship and the port), as well as vertical coordination within organizations (e.g., between port gate agents and the terminal control). All data exchanges respect contextual semantics and are governed by authentication, access control, and integrity mechanisms. This structure supports runtime semantic alignment, allowing newly added agents or systems to negotiate meanings and integrate dynamically into the network without centralized control. The result is a robust, flexible, and scalable framework that is capable of supporting complex, coordinated behavior in a heterogeneous and evolving maritime environment.
To ensure secure information exchange among agents and external systems, the framework employs basic security mechanisms, including message integrity verification using checksums and agent authentication via key certificates. Additionally, role-based access control is enforced at the ontology interface layer, restricting read/write privileges for sensitive classes (e.g., alarm triggers and compartment status) based on the agent’s functional domain.
By facilitating structured, ontology-driven data sharing, the framework enhances interoperability not only at the technical and syntactic levels but also at the semantic level, ensuring that autonomous agents across diverse organizations can accurately interpret and utilize the exchanged information. This capability is essential for achieving coordinated decision-making, optimizing operations, and maintaining safety and compliance across complex, multi-agent maritime environments.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}