

Nonlinear Observer Based on an Integrated Active Controller Applied to a Tractor with a Towed Implement System

 , , ,
, , ,  and
and 
Abstract
1. Introduction
- 1.
- The proposed controller integrates AFS and RTV to account for parameter variations while addressing the challenge of unmeasured state variables, such as lateral velocity and roll dynamics.
- 2.
- A nonlinear observer-based integrated active controller is designed for a tractor with a towed implement system. The observer reconstructs unmeasured states by deriving them from measurable quantities, including accelerations, longitudinal velocity, yaw rate, and steering angle.
- 3.
- The inclusion of Pacejka’s formula for tire dynamics provides a significant improvement in modeling nonlinear behaviors.
- 4.
- The controller’s performance is validated through two standard test maneuvers: the classic U-turn and the double-step maneuver, commonly used in ground vehicle testing.
- 5.
- MATLAB–Simulink simulations are conducted to demonstrate the effectiveness and applicability of the proposed approach.
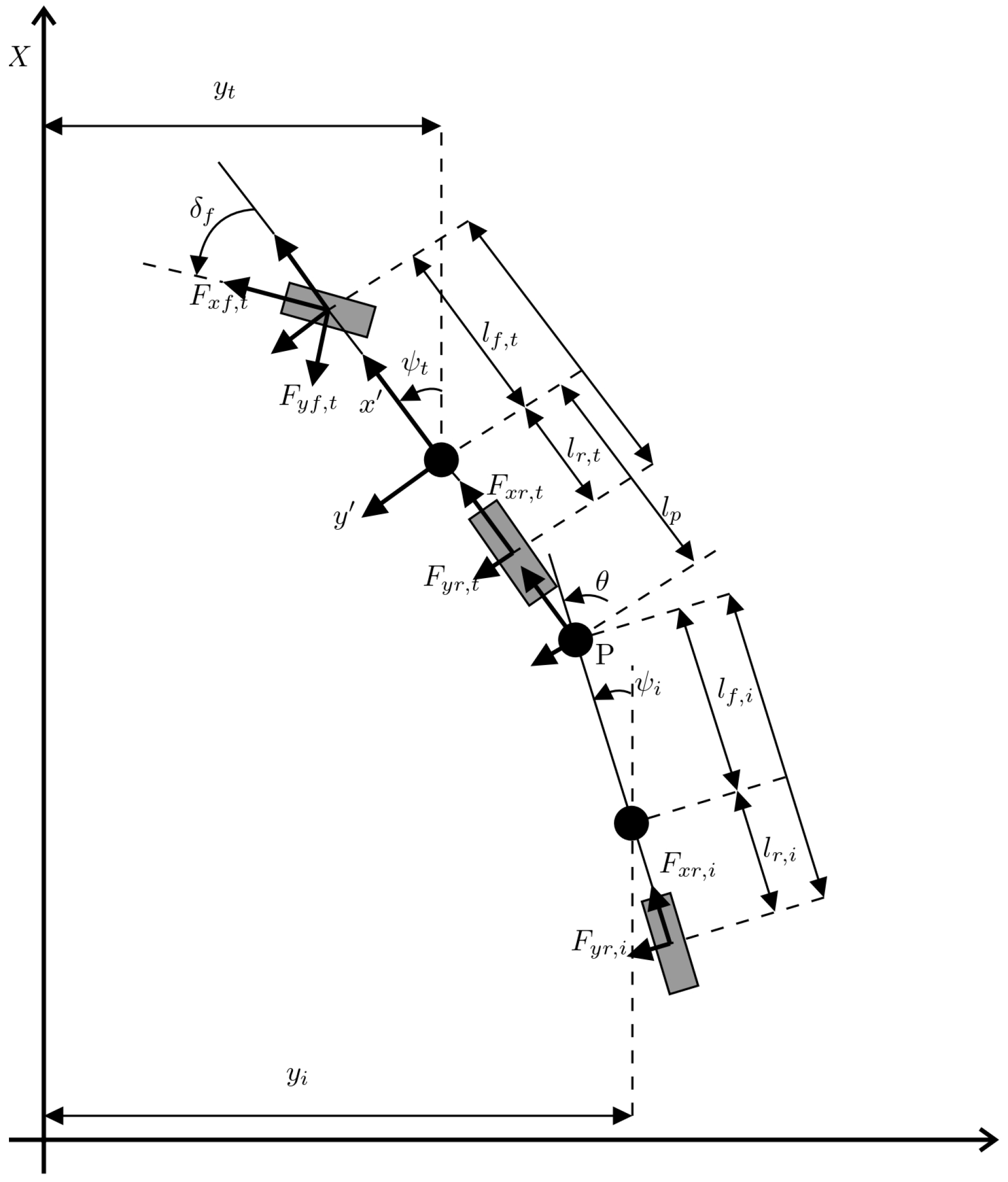
2. Mathematical Model
The Tractive Force
3. Nonlinear Observer Design
4. Dynamic Controller Design
5. Simulation Results
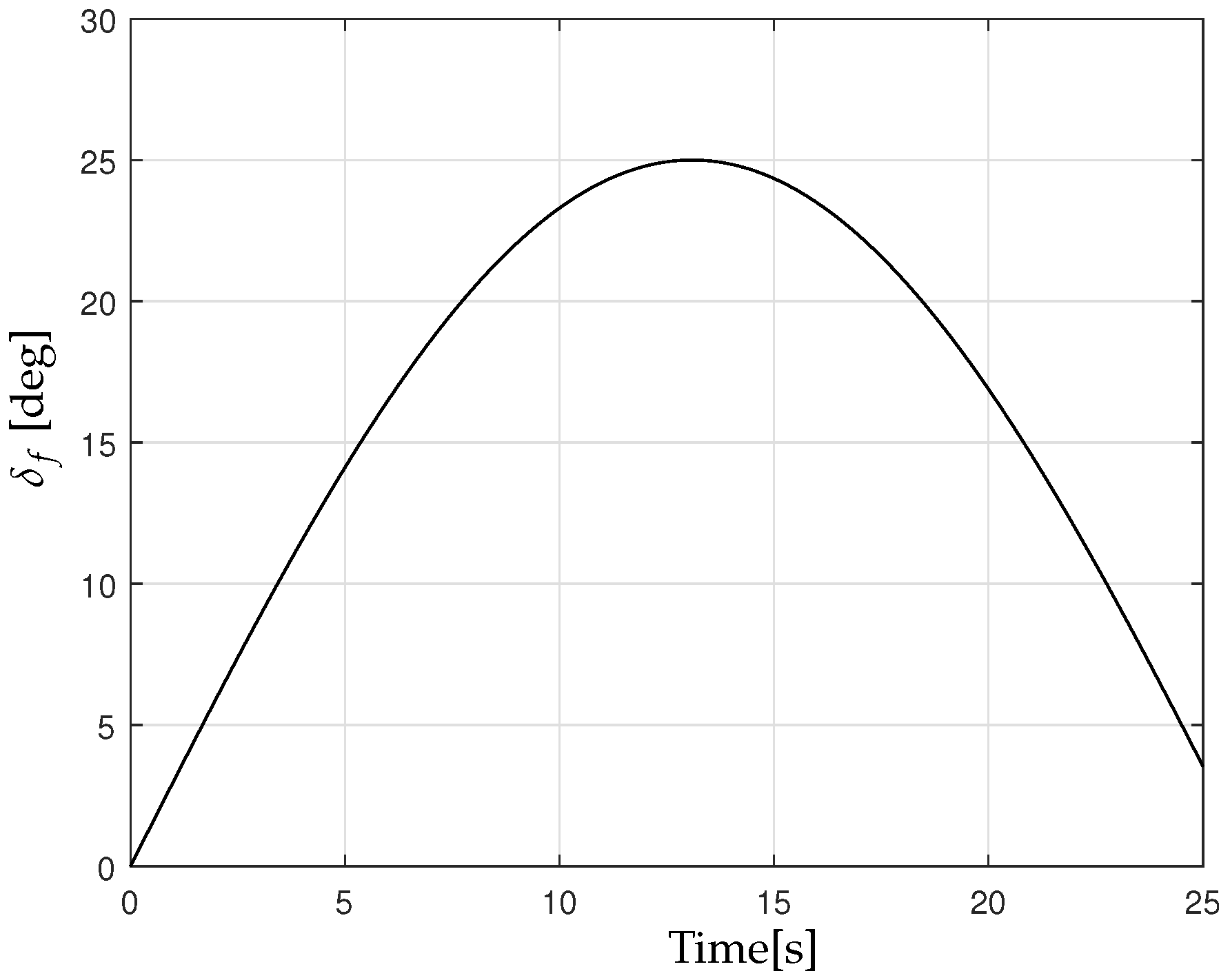
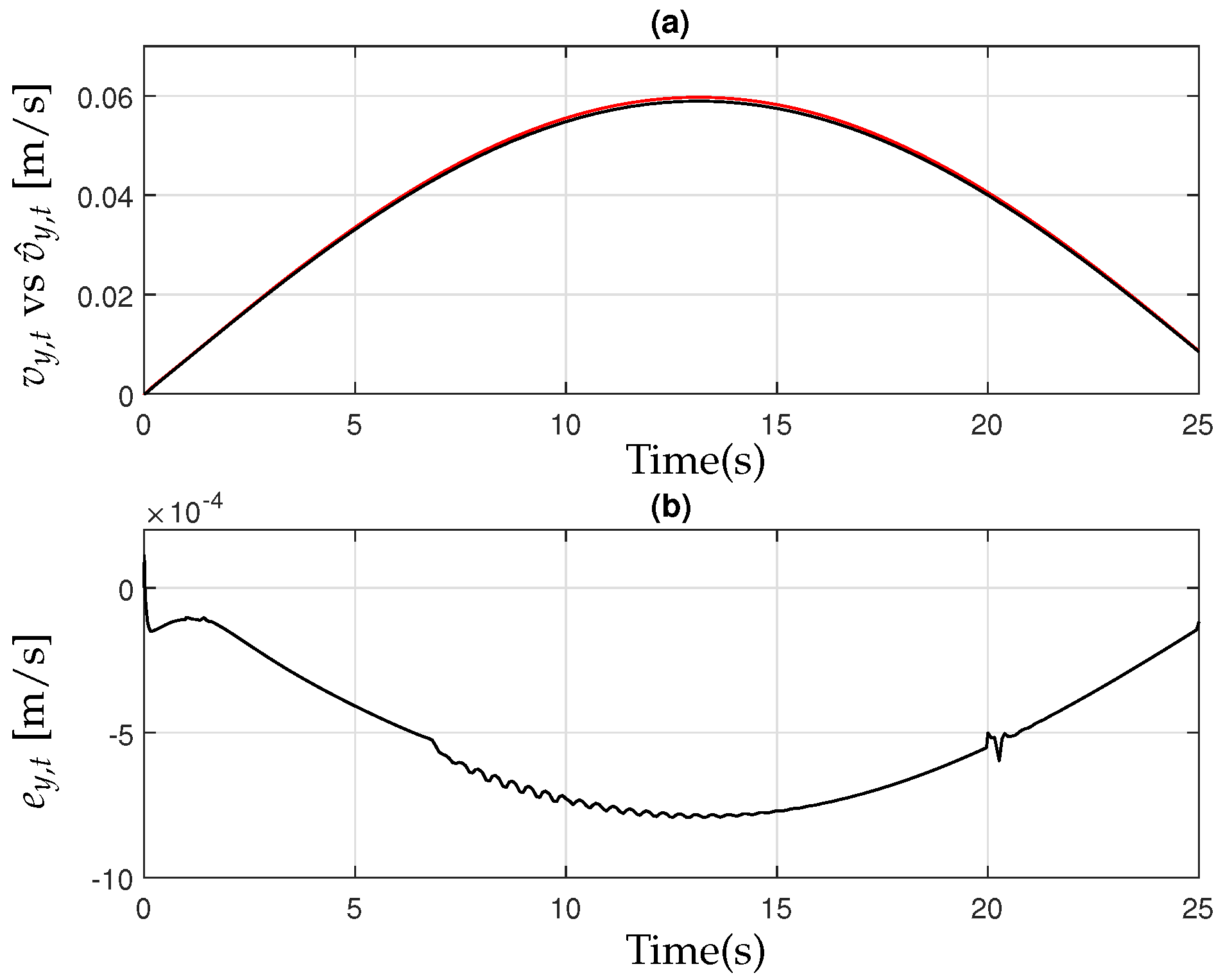
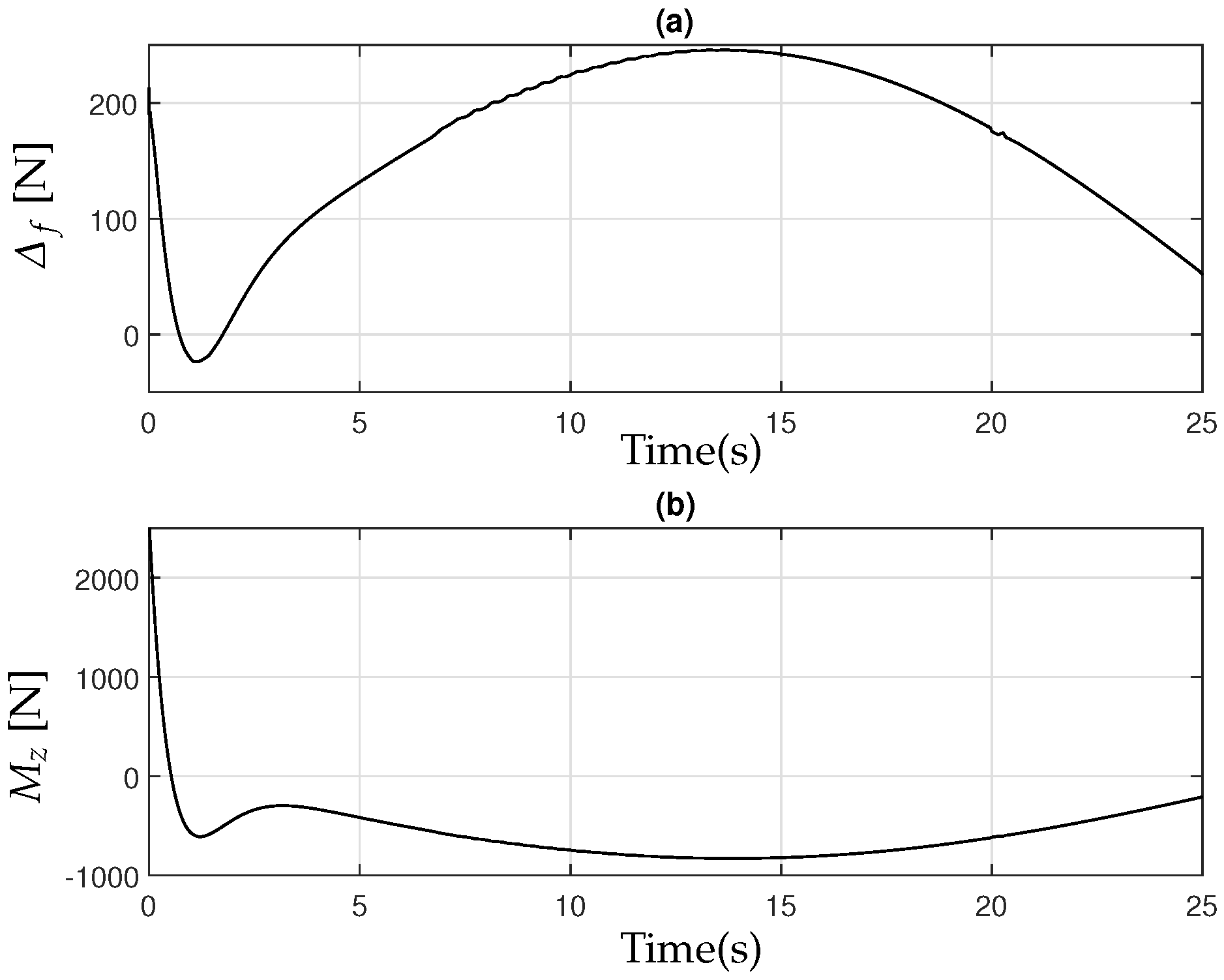
5.1. U-Turn Maneuver
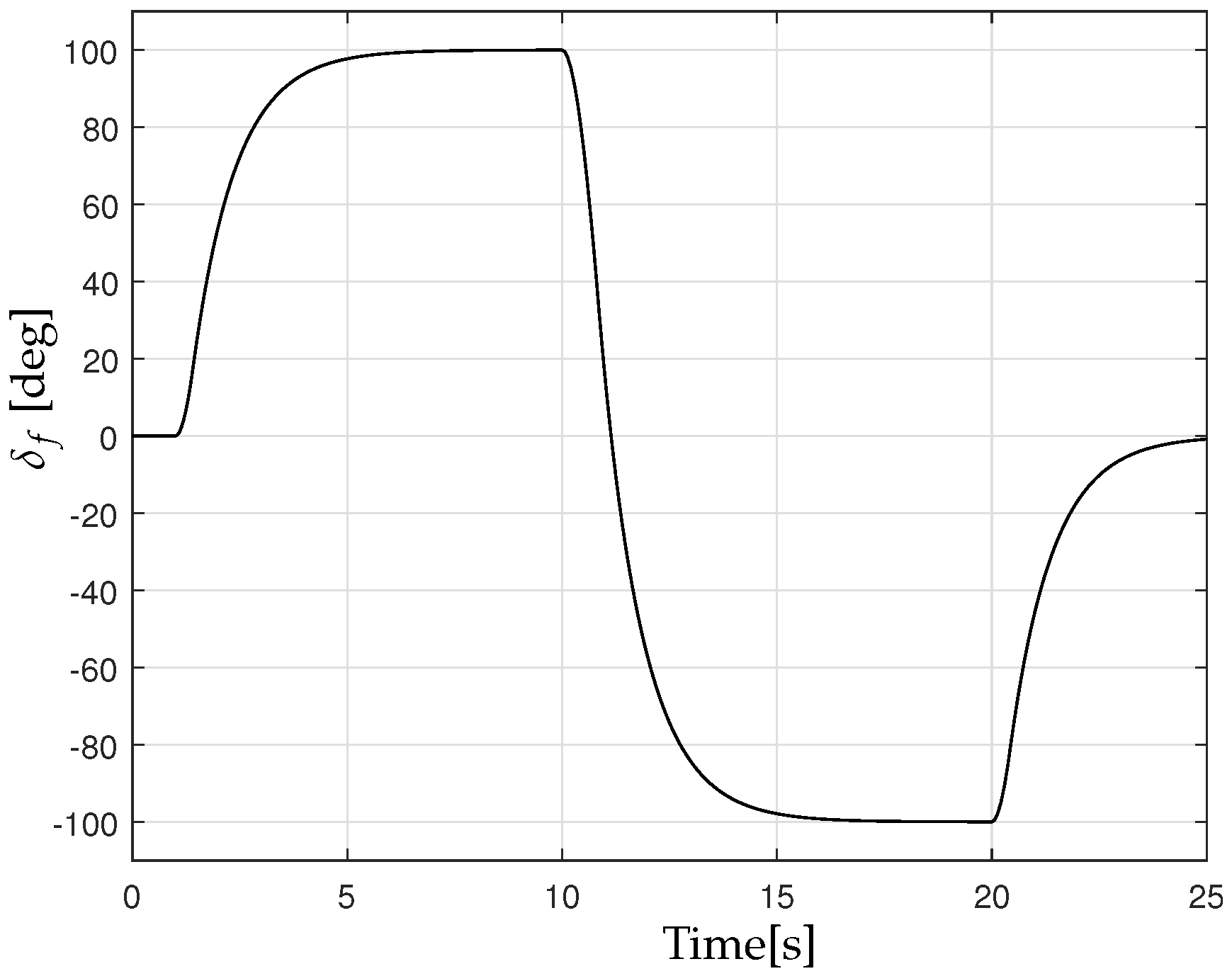
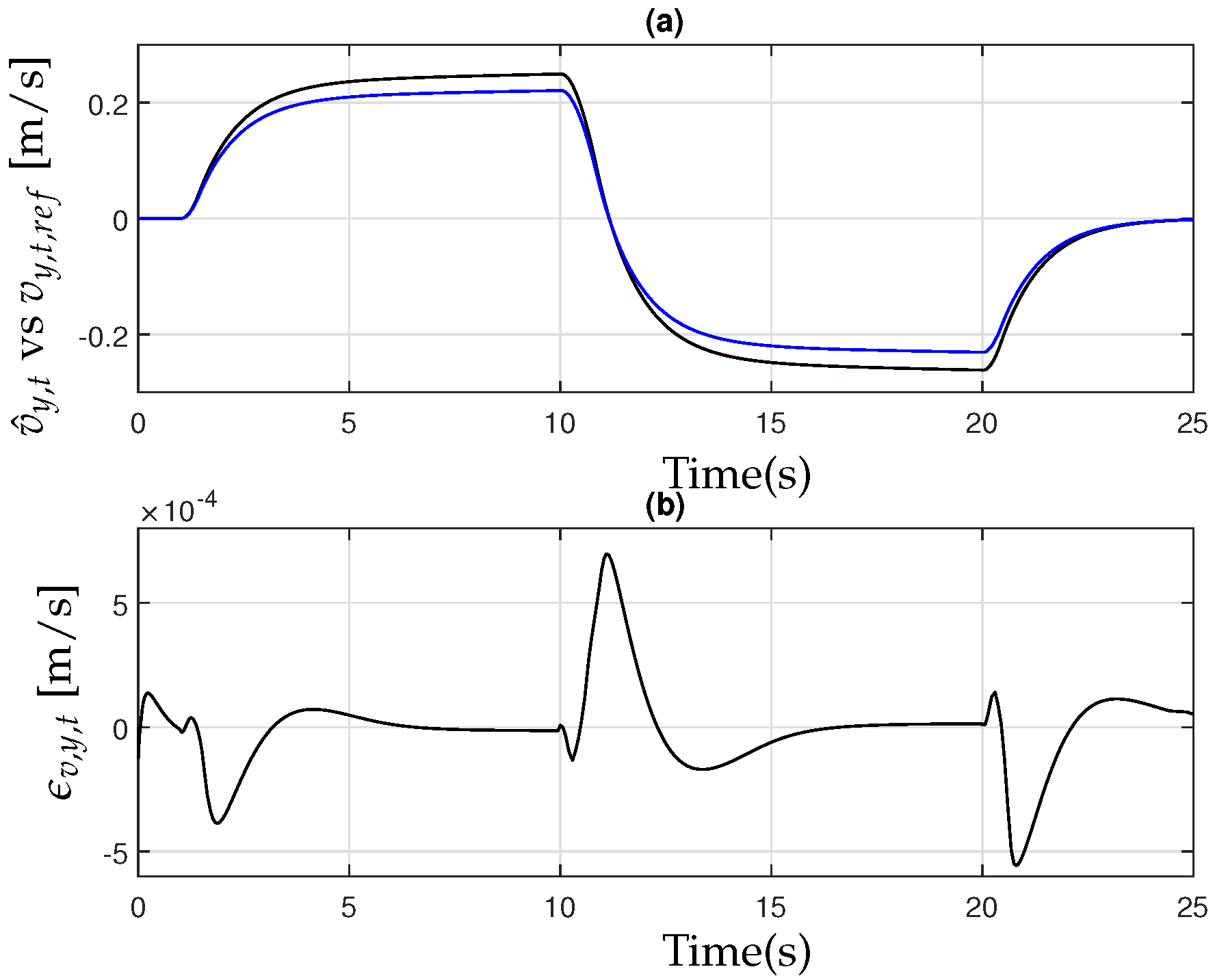
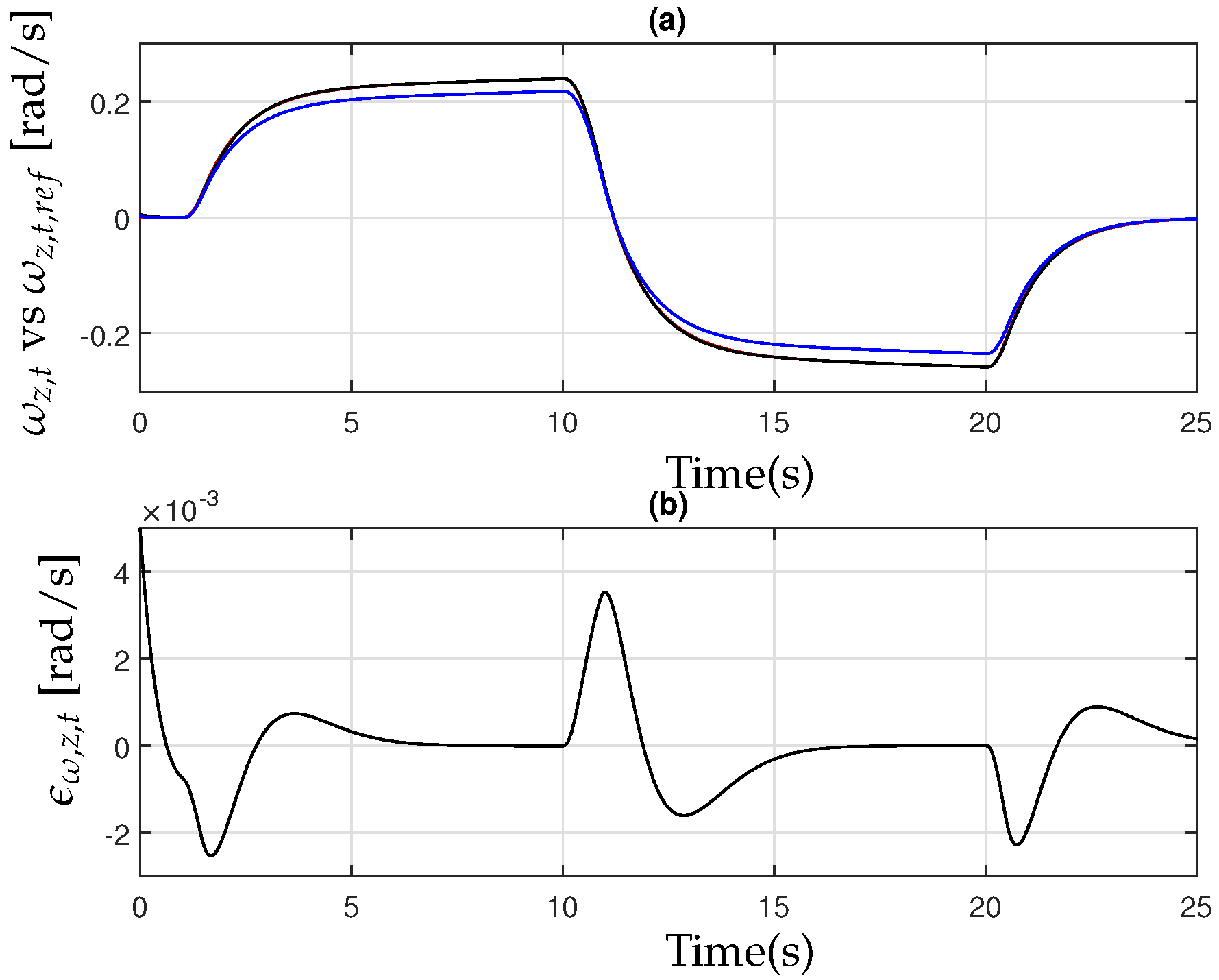
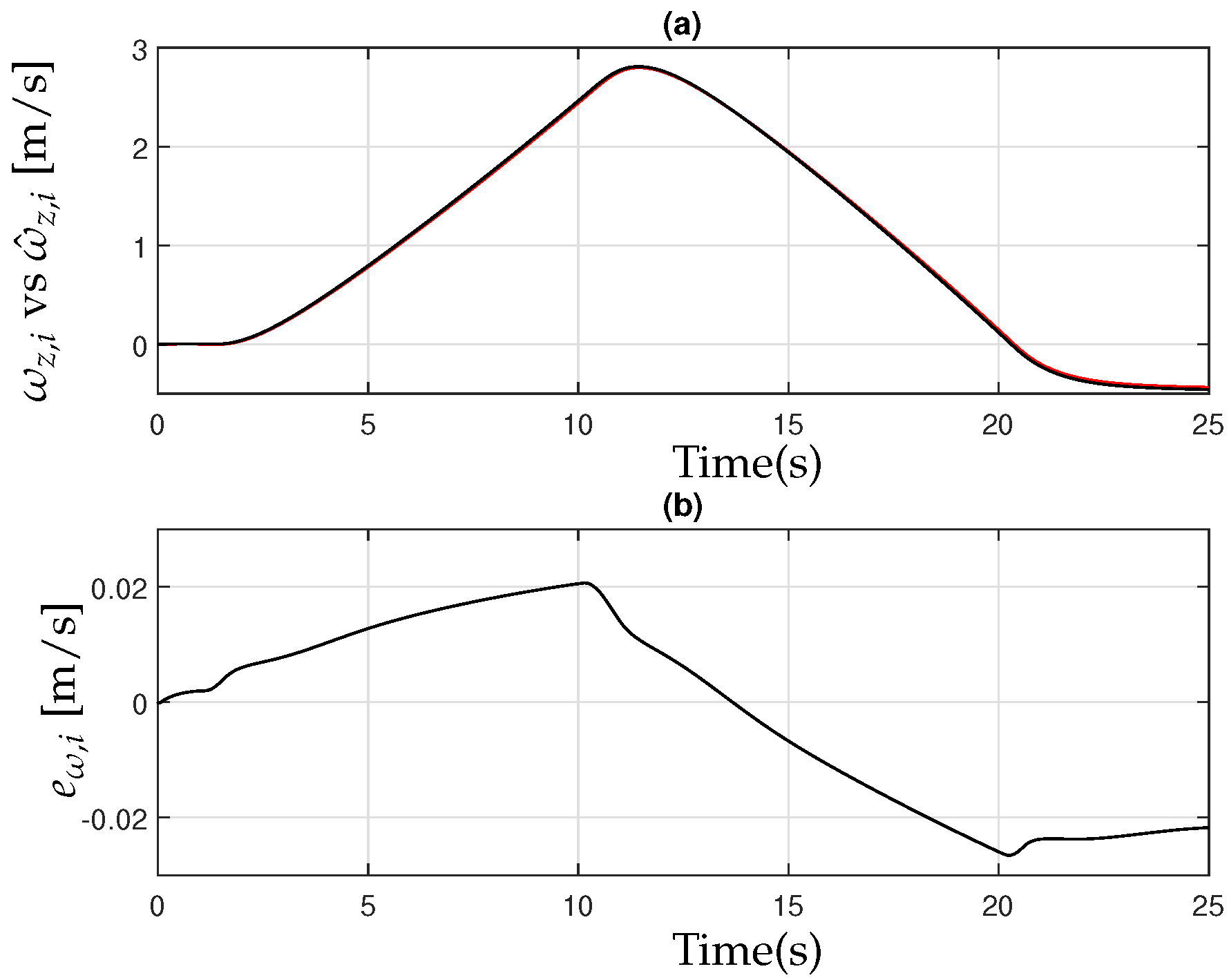
5.2. Double Steer Maneuver
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Nomenclature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| System Variables | |
| Tractor’s longitudinal velocity (m/s) | |
| Tractor’s lateral velocity (m/s) | |
| Tractor’s yaw rate (rad/s) | |
| Implement’s longitudinal velocity (m/s) | |
| Implement’s lateral velocity (m/s) | |
| Implement’s yaw rate (rad/s) | |
| Relative angle between the tractor and the implement (rad) | |
| Front wheel steering angle (rad) | |
| Driver’s steering input (rad) | |
| Active Front Steering (AFS) correction input (rad) | |
| Longitudinal acceleration of the tractor (m/s²) | |
| Tractor’s lateral acceleration (m/s²) | |
| Physical Parameters | |
| Tractor’s mass (kg) | |
| Implement’s mass (kg) | |
| Tractor’s moment of inertia about the z-axis (kg·m2) | |
| Implement’s moment of inertia about the z-axis (kg·m2) | |
| Distance from the tractor’s center of gravity (CG) to the front axle (m) | |
| Distance from the tractor’s CG to the rear axle (m) | |
| Distance from the hitch point to the tractor’s CG (m) | |
| Distance from the implement’s CG to its front axle (m) | |
| Distance from the implement’s CG to its rear axle (m) | |
| Forces and Tire Dynamics | |
| Longitudinal force on the tractor’s front tire (N) | |
| Longitudinal force on the tractor’s rear tire (N) | |
| Lateral force on the tractor’s front tire (N) | |
| Lateral force on the tractor’s rear tire (N) | |
| Lateral force at the hitch point (N) | |
| Lateral force at the implement’s hitch point (N) | |
| Lateral force on the implement’s rear tire (N) | |
| Front tire stiffness parameter (dimensionless) | |
| Rear tire stiffness parameter (dimensionless) | |
| Forces and Tire Dynamics | |
| Implement’s rear tire stiffness parameter (dimensionless) | |
| Front tire shape factor (N) | |
| Rear tire shape factor (N) | |
| Implement’s rear tire shape factor (N) | |
| Peak lateral force for the front tires (N) | |
| Peak lateral force for the rear tires (N) | |
| Peak lateral force for the implement’s rear tires (N) | |
| Slip angle of the tractor’s front tire (rad) | |
| Slip angle of the tractor’s rear tire (rad) | |
| Slip angle of the implement’s rear tire (rad) | |
| Symbol | Description |
|---|---|
| Observer Variables | |
| Estimation error of the tractor’s longitudinal velocity (m/s) | |
| Estimation error of the tractor’s lateral velocity (m/s) | |
| Estimation error of the implement’s yaw rate (rad/s) | |
| Estimated longitudinal velocity of the tractor (m/s) | |
| Estimated lateral velocity of the tractor (m/s) | |
| Estimated yaw rate of the implement (rad/s) | |
| Estimated lateral force on the tractor’s front tire (N) | |
| Estimated lateral force on the tractor’s rear tire (N) | |
| Estimated lateral force on the implement’s rear tire (N) | |
| Observer gains | |
| Observer design parameters | |
| Controller Variables | |
| Tractor’s lateral velocity tracking error (m/s) | |
| Tractor’s yaw rate tracking error (rad/s) | |
| Reference lateral velocity of the tractor (m/s) | |
| Reference yaw rate of the tractor (rad/s) | |
| Active Front Steering (AFS) control input | |
| Yaw moment input applied via Rear Torque Vectoring (RTV) | |
| Controller gains | |
| Reference System Constants (Table 1) | |
| Tire stiffness parameter for the front tires (dimensionless) | |
| Tire stiffness parameter for the rear tires (dimensionless) | |
| Tire shape factor for the front tires (dimensionless) | |
| Tire shape factor for the rear tires (dimensionless) | |
| Peak lateral force for the front tires (N) | |
| Peak lateral force for the rear tires (N) | |
References
- Trimble. Available online: https://ptxtrimble.com/en/products/hardware/guidance-control/nav-500-guidance-controller (accessed on 4 March 2024).
- John Deere. Future of Farming. Available online: https://www.deere.co.uk/en-gb/your-start-into-the-future-of-farming (accessed on 4 March 2024).
- Reid, J.; Searcy, S. Vision–based guidance of an agricultural tractor. IEEE Control Syst. Mag. 1987, 7, 39–43. [Google Scholar] [CrossRef]
- Bell, T. Automatic tractor guidance using carrier–phase differential GPS. Comput. Electron. Agric. 2000, 25, 53–66. [Google Scholar] [CrossRef]
- Erickson, B.; Widmar, D.A. Precision Agricultural Services Dealership Survey Results; Purdue University: West Lafayette, IN, USA, 2015. [Google Scholar]
- Poteko, J.; Eder, D.; Noack, P.O. Identifying operation modes of agricultural vehicles based on GNSS measurements. Comput. Electron. Agric. 2021, 185, 106105. [Google Scholar] [CrossRef]
- Stombaugh, T.S.; Benson, E.R.; Hummel, J.W. Guidance control of agricultural vehicles at high field speeds. Trans. ASAE 1999, 42, 537. [Google Scholar] [CrossRef]
- Bevly, D.M.; Gerdes, J.C.; Parkinson, B.W. A new yaw dynamic model for improved high-speed control of a farm tractor. J. Dyn. Syst. Meas. Control 2002, 124, 659–667. [Google Scholar] [CrossRef]
- Bevly, D.M. High Speed, Dead Reckoning, and Towed Implement Control for Automatically Steered Farm Tractors Using GPS. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2001. [Google Scholar]
- Pota, H.; Katupitiya, J.; Eaton, R. Simulation of a tractor-implement model under the influence of lateral disturbances. In Proceedings of the IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 596–601. [Google Scholar]
- O’Connor, M.L.; Bell, T.; Elkaim, G.; Parkinson, B. Automatic steering of farm vehicles using GPS. In Proceedings of the Third International Conference on Precision Agriculture, Minneapolis, MN, USA, 23–26 June 1996; pp. 767–777. [Google Scholar]
- O’Connor, M.L. Carrier–Phase Differential GPS for Automatic Control of Land Vehicles. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1997. [Google Scholar]
- Bell, T. Precision Robotic Control of Agricultural Vehicles on Realistic Farm Trajectories. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1999. [Google Scholar]
- Eglington, M.; O’Connor, M.; Leckie, L.; Sapilewski, G. System and Method for Guiding an Agricultural Vehicle Through a Recorded Template of Guide Paths. U.S. Patent 20060178820A1, 4 February 2005. [Google Scholar]
- Blackwell, R.; Schildroth, R.; Myers, M.J.; Rolffs, M.J.; Becker, D. Autonomous Systems, Methods, and Apparatus for Ag-Based Operations. U.S. Patent 20150105963A1, 10 October 2014. [Google Scholar]
- Basset, D.; Arthur, R.J. Modular Autonomous Farm Vehicle. U.S. Patent 20170164548A1, 11 April 2017. [Google Scholar]
- Shah, J. Pull–Drift–Compensation Mittels AFS. U.S. Patent 20150105965A1, 3 August 2018. [Google Scholar]
- Etienne, L.; Acosta Lúa, C.; Di Gennaro, S.; Barbot, J.-P. A Super–Twisting Controller for Active Control of Ground Vehicles with Lateral Tire–Road Friction Estimation and CarSim Validation. IEEE Trans. Control Syst. Technol. 2020, 8, 1177–1189. [Google Scholar] [CrossRef]
- Acosta Lúa, C.; Di Gennaro, S. Nonlinear adaptive tracking for ground vehicles in the presence of lateral wind disturbances and parameter variations. J. Franklin Inst. 2017, 354, 2742–2768. [Google Scholar] [CrossRef]
- Acosta Lúa, C.; Castillo–Toledo, B.; Di Gennaro, S. Nonlinear output robust regulation of ground vehicles in presence of disturbances and parameter uncertainties. In Proceedings of the 17th IFAC World Congress, Seoul, Republic of Korea, 6–11 July 2008; pp. 141–146. [Google Scholar]
- Acosta Lúa, C.; Castillo–Toledo, B.; Cespi, R.; Di Gennaro, S. An integrated active nonlinear controller for wheeled vehicles. J. Franklin Inst. 2015, 352, 4890–4910. [Google Scholar] [CrossRef]
- Navarrete–Guzmán, A.; Vaca–García, C.C.; Di Gennaro, S.; Acosta Lúa, C. HOSM Controller Using PI Sliding Manifold for an Integrated Active Control for Wheeled Vehicles. Math. Probl. Eng. 2021, 2021, 5482421. [Google Scholar]
- Grip, H.V.; Imsland, L.; Johansen, T.A.; Fossen, T.I.; Kalkkulhl, J.C.; Suissa, A. Nonlinear vehicle side-slip estimation with friction adaptation. Automatica 2008, 44, 611–622. [Google Scholar] [CrossRef]
- Zhao, L.H.; Chen, H. Design of a nonlinear observer for vehicle velocity estimation and experiments. IEEE Trans. Control Syst. Technol. 2011, 19, 664–672. [Google Scholar] [CrossRef]
- Baffet, G.; Stephant, J.; Charara, A. Lateral vehicle–dynamic observers: Simulations and experiments. Int. J. Veh. Auton. Syst. 2007, 5, 184–203. [Google Scholar] [CrossRef]
- Guo, H.; Chen, H.; Cao, D.; Jin, W. Design of a reduced—Order nonlinear observer for vehicle velocities estimation. IET Control Theory Appl. 2013, 7, 2056–2068. [Google Scholar] [CrossRef]
- Solmaz, S.; Baçslamiçsli, S. Simultaneous estimation of road friction and sideslip angle based on switched multiple non–linear observers. IET Control Theory Appl. 2011, 6, 2235–2247. [Google Scholar] [CrossRef]
- Pan, H.; Sun, W.; Gao, H.; Hayat, T.; Alsaadi, F. Nonlinear tracking control based on extended state observer for vehicle active suspensions with performance constraints. Mechatronics 2014, 30, 363–370. [Google Scholar] [CrossRef]
- Shen, X.; Liu, G.; Liu, J.; Gao, Y.; Leon, J.I.; Wu, L.; Franquelo, L.G. Fixed-time sliding mode control for NPC converters with improved disturbance rejection performance. IEEE Trans. Ind. Inform. 2025. [Google Scholar] [CrossRef]
- Vo, A.T.; Truong, T.N.; Le, Q.D.; Kang, H.-J. Fixed-Time Sliding Mode-Based Active Disturbance Rejection Tracking Control Method for Robot Manipulators. Machines 2023, 11, 140. [Google Scholar] [CrossRef]
- Giap, N.V.; Vu, H.S.; Nguyen, Q.D.; Huang, S.C. Disturbance and Uncertainty Rejection-Based on Fixed-Time Sliding-Mode Control for the Secure Communication of Chaotic Systems. IEEE Access 2021, 9, 133663–133685. [Google Scholar] [CrossRef]
- Shen, X.; Liu, J.; Liu, G.; Zhang, J.; Leon, J.I.; Wu, L.; Franquelo, L.G. Finite-time sliding mode control for NPC converters with enhanced disturbance compensation. IEEE Trans. Circuits Syst. Regul. Pap. 2024, 72, 1822–1831. [Google Scholar] [CrossRef]
- Meng, J.; Tan, H.; Jiang, L.; Qian, C.; Xiao, H.; Hu, Z.; Li, G. Robust Finite-Time Sliding Mode Control of Unmanned Surface Vehicle with Active Compensation of Pose Estimation Uncertainty. Ocean Eng. 2024, 304, 117831. [Google Scholar] [CrossRef]
- Shen, X.; Liu, J.; Liu, Z.; Gao, Y.; Leon, J.I.; Vazquez, S.; Wu, L.; Franquelo, L.G. Sliding mode control of neutral-point-clamped power converters with gain adaptation. IEEE Trans. Power Electron. 2024, 39, 9189–9201. [Google Scholar] [CrossRef]
- Karkee, M.; Steward, B.L. Study of the open and closed loop characteristics of a tractor and a single axle towed implement system. J. Terramech. 2010, 47, 379–393. [Google Scholar] [CrossRef]
- Pacejka, H. Tyre and Vehicle Dynamics; Elsevier Butterworth–Heinemann: Butterworth, Malaysia, 2005. [Google Scholar]
- Imsland, L.; Johansen, T.A.; Fossen, T.I.; Grip, H.V.; Kalkkulhl, J.C.; Suissa, A. Vehicle estimation using nonlinear observer. Automatica 2006, 42, 2091–2103. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice–Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Lee, M.F.R.; Nugroho, A.; Purbowaskito, W.; Bastida, S.N. Path Following for Autonomous Tractor under Various Soil Conditions and Unstable Lateral Dynamic. In Proceedings of the 2020 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 19–21 August 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Lei, G.; Zhou, S.; Zhang, P.; Xie, F.; Gao, Z.; Shuang, L.; Xue, Y.; Fan, E.; Xin, Z. Stability Control of the Agricultural Tractor-Trailer System in Saline Alkali Land: A Collaborative Trajectory Planning Approach. Agriculture 2025, 15, 100. [Google Scholar] [CrossRef]
- Cutini, M.; Bisaglia, C.; Brambilla, M.; Bragaglio, A.; Pallottino, F.; Assirelli, A.; Romano, E.; Montaghi, A.; Leo, E.; Pezzola, M.; et al. A Co-Simulation Virtual Reality Machinery Simulator for Advanced Precision Agriculture Applications. Agriculture 2023, 13, 1603. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, Z.; Qin, Z.; Guo, K.; Li, D. Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review. Machines 2024, 12, 218. [Google Scholar] [CrossRef]
- Karkee, M. Modeling, Identification and Analysis of Tractor and Single Axle Towed Implement System. Ph.D. Dissertation, Iowa State University, Ames, IA, USA, 2008. [Google Scholar]
- Wang, H.; Noguchi, N. Real-time states estimation of a farm tractor using dynamic mode decomposition. GPS Solut. 2021, 25, 16. [Google Scholar] [CrossRef]







| = 60,000 | = 40,000 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vera Vaca, C.V.; Acosta Lúa, C.; Hinojosa-Dávalos, J.; Vaca García, C.C.; Di Gennaro, S. Nonlinear Observer Based on an Integrated Active Controller Applied to a Tractor with a Towed Implement System. Electronics 2025, 14, 1575. https://doi.org/10.3390/electronics14081575
Vera Vaca CV, Acosta Lúa C, Hinojosa-Dávalos J, Vaca García CC, Di Gennaro S. Nonlinear Observer Based on an Integrated Active Controller Applied to a Tractor with a Towed Implement System. Electronics. 2025; 14(8):1575. https://doi.org/10.3390/electronics14081575
Chicago/Turabian StyleVera Vaca, Claudia Verónica, Cuauhtémoc Acosta Lúa, Joel Hinojosa-Dávalos, Claudia Carolina Vaca García, and Stefano Di Gennaro. 2025. "Nonlinear Observer Based on an Integrated Active Controller Applied to a Tractor with a Towed Implement System" Electronics 14, no. 8: 1575. https://doi.org/10.3390/electronics14081575
APA StyleVera Vaca, C. V., Acosta Lúa, C., Hinojosa-Dávalos, J., Vaca García, C. C., & Di Gennaro, S. (2025). Nonlinear Observer Based on an Integrated Active Controller Applied to a Tractor with a Towed Implement System. Electronics, 14(8), 1575. https://doi.org/10.3390/electronics14081575