1. Introduction
The global energy transition has catalyzed the unprecedented proliferation of distributed photovoltaic (DPV) deployment worldwide. The European Union’s Renewable Energy Directive establishes binding renewable energy targets [
1]. The U.S. Inflation Reduction Act implements structured fiscal incentives for solar-storage hybridization [
2]. China’s dual carbon policy framework vigorously promotes renewable integration [
3]. However, the high-penetration integration of DPVs into active distribution networks (AND) brings significant spatiotemporal challenges [
4]. The intermittency and uncertainty of DPVs may cause reverse power flow, exacerbated net load fluctuations, increased voltage deviations and reliability degradation, which threaten network operation stability [
5]. Thus, the contradiction between maintaining network operation stability and large amounts of DPV integration brings worldwide attention.
Energy storage systems (ESSs) provide critical solutions for DPV integration through their unique bidirectional power regulation and temporal energy shifting capabilities [
6]. Considering the interaction between source, storage and load, the collaborative optimal configuration model for minimizing economic costs is an important research direction [
7]. Xie et al. [
8] listed several applicable functions in practical ESS projects, including peak cutting and valley filling, renewable energy output smoothing, overvoltage suppression and harmonic oscillation suppression. Yan et al. [
9] proposed a multi-stage, four-level intelligent optimization control algorithm that integrated electric vehicle charging stations with PVs and battery ESSs. The algorithm planned the optimal charging and discharging strategies for electric vehicles and battery packs to reduce distribution network operational costs and improve reliability. Liao et al. [
10] proposed a bi-level optimization model for DPVs and ESSs based on an improved deep-embedded K-means clustering algorithm, with the objective of minimizing daily operation costs, voltage deviations and network losses. Rawa et al. [
11] proposed a seasonal optimization framework for optimizing the short-term operations of a microgrid, including energy storage and PVs, to reduce the total operation costs of the grid-integrated microgrid. Cho et al. [
12] proposed a PV-ESS optimization configuration method for ADNs, improving renewable integration and economic performance through capacity configuration. Zhang et al. [
13] established a bi-level planning model for distribution networks. The aim was to minimize cost and voltage deviation. This model optimized the coordinated operation of source–grid–load–storage and determined the sitting and sizing of ESSs.
To optimize ESS configurations, researchers have developed various assessment methods. Zhou et al. [
14] used a bi-level optimization model to integrate multiple renewable sources and ESSs for cost-effective and reliable distribution network planning. Li et al. [
15] introduced the energy storage performance index to evaluate the importance of distributed energy storage systems in the grid, optimizing their daily operations and investment costs using a genetic algorithm. Picioroaga et al. [
16] proposed a resilience-driven ESS-sizing method based on a Mixed-Integer Linear Programming model to enhance microgrid reliability and resilience, using recovery and resilience indices. Rasool et al. [
17] further expanded the assessment scope by developing a multi-objective optimization framework for hybrid renewable energy systems, incorporating the renewable energy supply fraction and energy export index alongside the cost of energy to provide a comprehensive evaluation of ESS configurations.
DPV hosting capacity refers to the maximum DPV capacity that a distribution network can safely accommodate. It serves as a crucial basis for the planning and operation of ADNs. Koirala et al. [
18] evaluated various deterministic and stochastic methods for calculating the hosting capacity of photovoltaic systems in low-voltage distribution networks. By using real network data, the strengths and applicability of each approach were highlighted. Tan et al. [
19] established a DPV hosting capacity assessment model for medium-voltage distribution networks, with the equivalent grid-connected capacity of DPVs as the objective function. Jain et al. [
20] proposed a dynamic distributed photovoltaic hosting capacity methodology that could more fully capture the grid impacts of distributed photovoltaic systems compared to traditional methods. Allocating ESSs to enhance DPV hosting capacity has been proven effective. Shabbir et al. [
21] proposed a machine learning-based control solution to alleviate overloading and overvoltage issues caused by the high penetration of DPV installations in low-voltage ADNs. The strategy employs a long short-term memory algorithm for day-ahead PV forecasting to optimize the charging/discharging of residential ESSs. Zhou et al. [
22] proposed an optimal configuration and charging/discharging strategy for energy storage systems to improve the hosting capacity level of DPVs. Additionally, Vellingiri et al. [
23] proposed a method to estimate the maximum hosting capacity for renewables in power grids, considering both ESSs and transmission line expansion. Numerical studies demonstrated the efficiency of the proposed method in maximizing renewable energy source penetration and improving system reliability.
In summary, ESSs play a crucial role in promoting renewable energy integration and enhancing hosting capacity. However, an ESS configuration method considering both current network operation optimization and the further improvement of DPV hosting capacity has not been reported. Thus, an ESS optimal configuration method is proposed for balancing and optimizing the above two aspects. The main contributions of this paper can be defined as follows:
- (1)
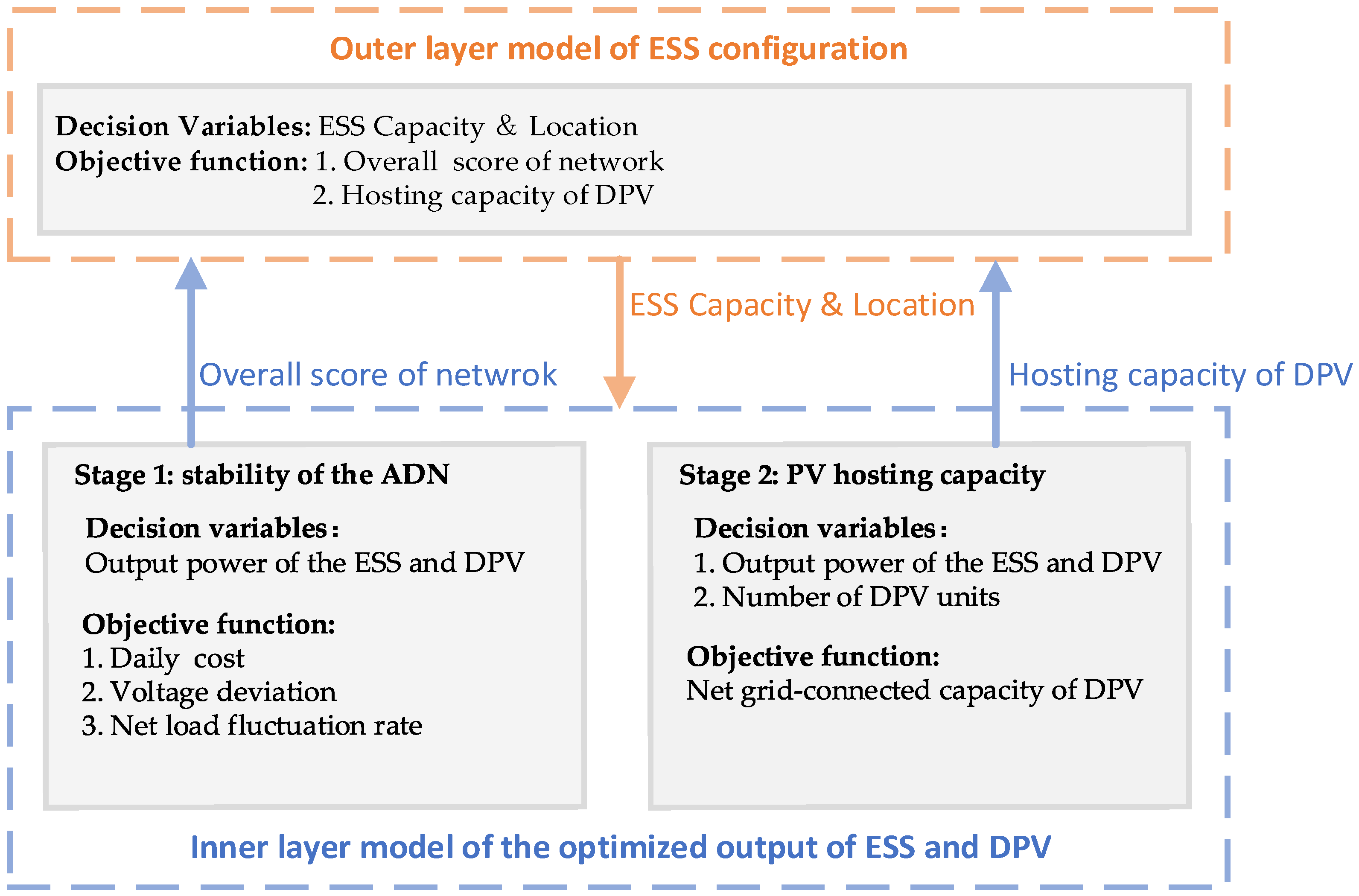
A two-layer, double-stage ESS configuration model is constructed. The outer layer is a configuration layer for the ESS position and capacity. The inner layer is the optimization operation layer, including the first stage of current network operation optimization and the second stage of further DPV hosting capacity improvement. By configuring the ESS, both the operation stability and the DPV hosting capacity are simultaneously improved.
- (2)
A targeted solution strategy is designed to effectively support the configuration model. In the constructed model, single-objective, dual-objective and multi-objective optimization problems are all involved. Thus, solver and intelligent algorithms are used for the corresponding stage. To obtain a compromised optimal solution for multi-objective problems, a modified Technique for Order of Preference by Similarity to Ideal Solution (TOPSIS) and analytic hierarchy process–anti-entropy weighting method are used. The proposed solving strategy takes full advantage of the algorithms’ characteristics, which promotes solving efficiency.
- (3)
Multiple cases with different operation conditions, different solving algorithms and different configuration models are analyzed and compared. The proposed method offers optimal operation and configuration results for all cases. The effectiveness has been verified.
The remainder of this paper is organized as follows.
Section 2 introduces the modeling of ESSs and DPVs. The two-layer, double-stage ESS configuration model is also elaborated.
Section 3 designs the solution strategy and algorithm for the proposed optimization model.
Section 4 presents case studies under multiple conditions.
Section 5 gives the conclusions.
3. Solution Strategy and Algorithm
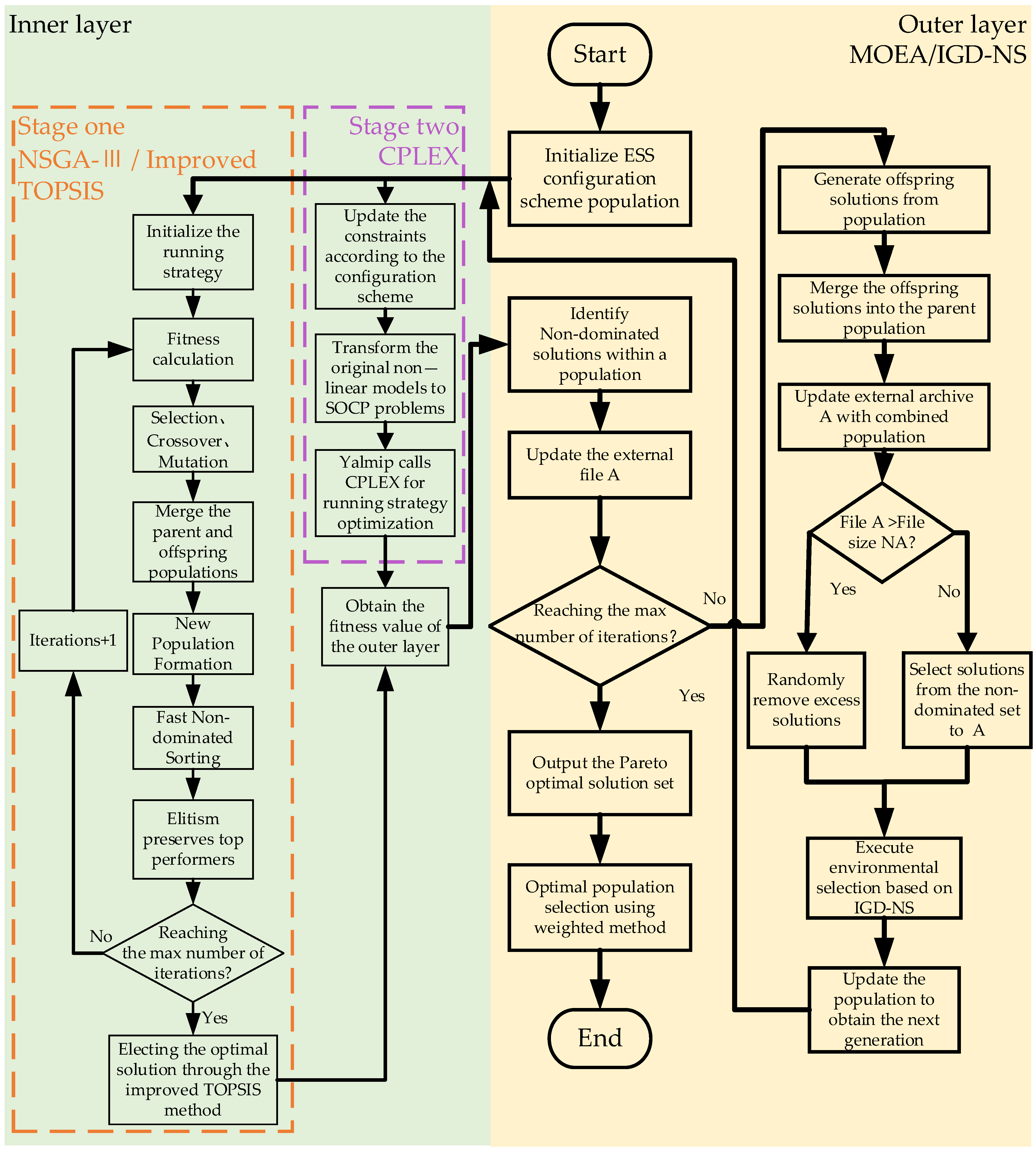
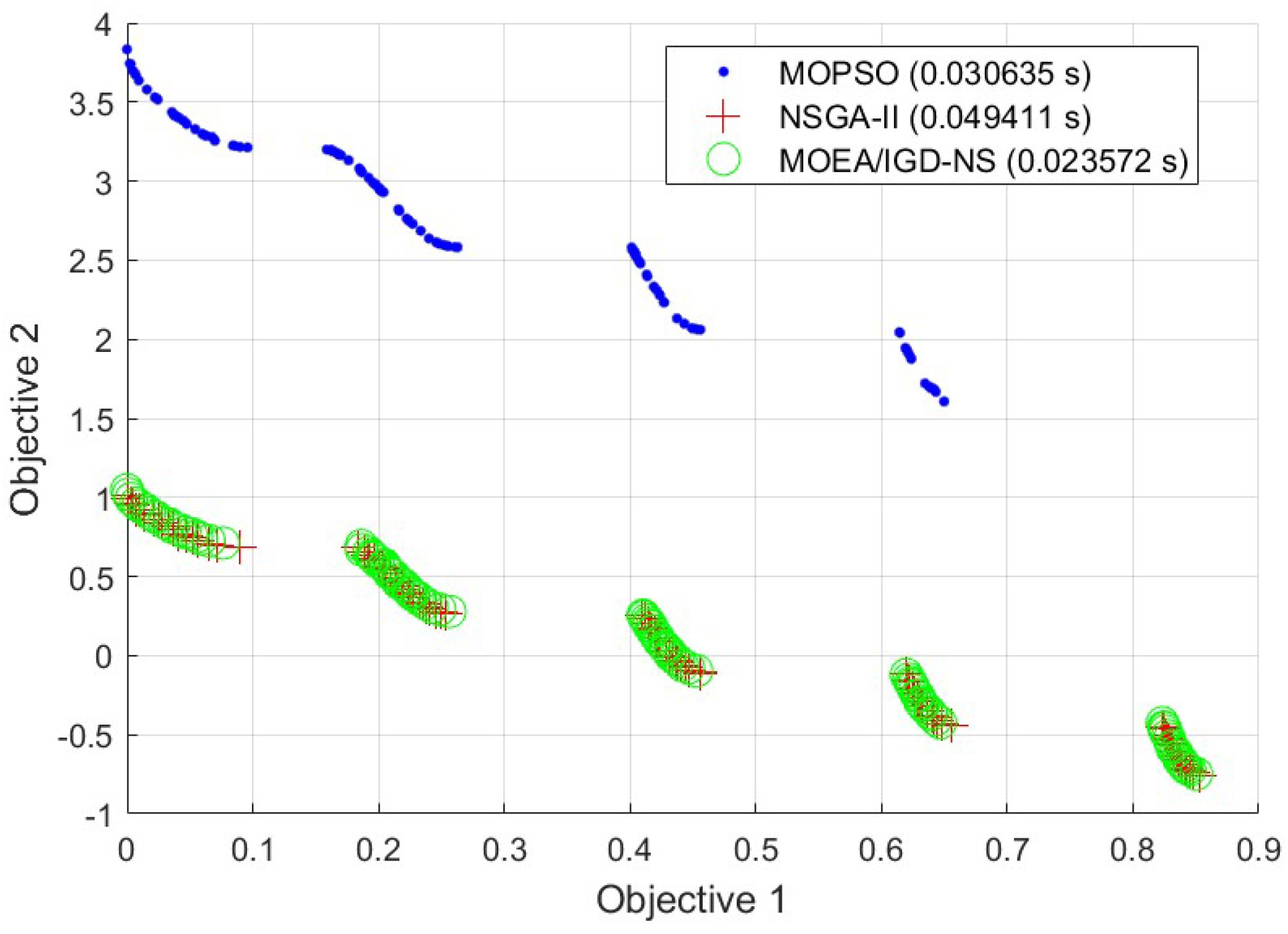
The proposed two-layer, double-stage ESS optimization configuration model requires several different solving processes, including single-objective optimization, multi-objective optimization and nested solving of both inner and outer layers. To improve solving efficiency, different solving methods are employed for different optimization problems. Specifically, Multi-Objective Evolutionary Algorithm based on Improved Inverted Generational Distance and Non-dominated Sorting (MOEA/IGD-NS), Non-dominated Sorting Genetic Algorithm-III (NSGA-III) and CPLEX solver are used to solve the respective optimization problems. The detailed workflow of this process is illustrated in
Figure 2.
3.1. Solution Strategy for the Outer-Layer Model
The MOEA/IGD-NS is employed for solving the outer-layer model. The algorithm, inspired by biological evolution and population genetics mechanisms in nature, is renowned for its simplicity, minimal control parameters and outstanding optimization performance [
26]. The MOEA/IGD-NS introduces an enhanced IGD-NS to evaluate the convergence and diversity of the solution set. It identifies and removes non-contributing solutions. Only solutions that effectively contribute to the optimization objectives are retained in the solution set. Thus, it is suitable for addressing the two-stage ESS configuration problem in a comprehensive manner. The flowchart of the MOEA/IGD-NS applied for outer-layer optimization is illustrated in
Figure 2, which depicts the outer-layer ESS planning process.
Specific process introduction:
1. The values of the non-dominated solutions are passed from the inner layer.
2. Establish external archive A to store a set of the best non-dominated solutions discovered so far, as a reference set for IGD-NS calculations.
3. Update external archive A and repeat the evolutionary process until the termination condition is met.
4. Identify non-contributing solutions within the IGD-NS metric.
5. Eliminate the solutions that have the smallest contribution to the IGD-NS metric value.
6. Update the population and return to the inner layer to obtain the non-dominated solution.
7. Continue the iterative evolutionary process until the termination criteria are satisfied.
3.2. Solution Strategy for the Inner-Layer Model
The inner layer holds a two-stage optimization framework. The optimization of the first stage is a tri-objective optimization problem. It is solved by NSGA-III algorithm. The Pareto optimal solution is determined through an enhanced decision-making approach combining TOPSIS with the analytic hierarchy process (AHP)–anti–entropy weighting Method. The second stage focuses on DPV hosting capacity optimization. The objective function is the maximal equivalent grid-connected DPV capacity. It is solved by CPLEX optimizer.
Figure 2 illustrates the complete solution workflow, detailing the interaction between two stages.
3.2.1. Solution Strategy of the First Stage
NSGA-III is an evolutionary algorithm designed to solve multi-objective optimization problems [
27]. NSGA-III begins with non-dominated sorting of the individuals in the population, assigning each individual to a specific non-dominated rank. Then, a set of predefined reference points is used to guide the searching process. Finally, a niche-preservation operation is employed to select individuals, ensuring that the population covers different regions of the Pareto front. In this study, NSGA-III is used to optimize the output power of the DPV and ESS in the inner layer. NSGA-III yields a set of Pareto optimal solutions. To obtain the compromised optimal solution, an enhanced TOPSIS method incorporating subjective and objective weightings is employed.
- (1)
TOPSIS-based Pareto Solution Selection
The TOPSIS method makes decisions by calculating the distances between the alternatives and the positive ideal solution or negative ideal solution, respectively. The selected solution is the one that has the minimum distance to the positive ideal solution and the maximum distance to the negative ideal solution, thereby obtaining the final compromised optimal solution [
28].
To ensure comparability across objective functions with heterogeneous dimensions, normalization is performed as follows.
where
represents the
i-th set of optimization objectives, encompassing all
and
; the upper bound max(
fm) denotes the negative ideal solution of the
m-th objective function, corresponding to the optimization result obtained without ESS deployment; and min(
fm) represents the ideal minimum value as 0, corresponding to the theoretically optimal solution.
The TOPSIS method selects the compromised optimal solution from the Pareto front by maximizing the optimal fit degree
and quantifying the solution’s proximity to the positive ideal solution while maximizing its distance from the negative ideal solution. The formula is given as follows:
where
and
represent the distances from solution
to the positive ideal solution or the negative ideal solution, respectively. After normalization, the positive ideal solution is the point
(0,0,0), and the negative ideal solution is the point
(1,1,1).
represents the weight corresponding to the optimization objective
,
, and
.
- (2)
Combined Weighting: AHP and Anti-Entropy Method
To ensure reliable TOPSIS evaluation results, a combined weighting approach is used by integrating subjective AHP weights with objective entropy weights. Thus, expert judgment and objectivity can be balanced.
Based on the established indicator system, a three-indicator AHP is used to determine the subjective weights of each indicator. The specific algorithm steps are as follows [
29].
Based on expert opinions, the importance of each indicator is compared pairwise to form a judgment matrix
A, which is as follows:
where
represents the importance of objective
i relative to objective
j, with values ranging from [1, 9]. The values indicate the level of importance, ranging from “equally important” to “extremely more important” for the former objective compared to the latter.
To avoid significant discrepancies between subjective judgment and objective reality, a consistency check is performed on the judgment matrix by calculating the consistency ratio (CR) value, which is calculated as follows:
where
is the maximum eigenvalue of the judgment matrix.
CI represents consistency indicators;
RI is the Random Consistency Index.
If the CR value is less than 0.1, the consistency of the judgment matrix is acceptable. The normalized eigenvector of the judgment matrix is then used as the weight vector to obtain the subjective weights for each indicator, denoted as
.
where
represents the component corresponding to the
j-th indicator in the initial feature vector.
A low-sensitivity anti-entropy weighting approach is employed for objective indicator weighting. The anti-entropy weight formula is calculated as follows:
In the formula, represents the inverse entropy of the j-th indicator of solution .
After the normalization of anti-entropy, the final calculation for obtaining the objective weights
is calculated as follows:
The comprehensive weight calculation is as follows, which is obtained by combining the subjective and objective weights.
Take the comprehensive weight results into Equations (30) and (31) to calculate the optimal fit of each candidate objective set. After ranking, the solution with the highest fit is selected as the final compromised solution.
3.2.2. Solution Strategy of the Second Stage
In the second stage of the inner layer, optimization is a single-objective problem. The CPLEX solver is used for solving the problem. In the power flow model, there are nonlinear terms such as complex power flow
and active power
. This causes the optimal power flow model to be non-convex, making it difficult for solvers to solve directly. To facilitate rapid solving, the paper adopts a second-order cone relaxation method to convexify the above model, converting the non-convex model into a convex model [
30].
5. Conclusions
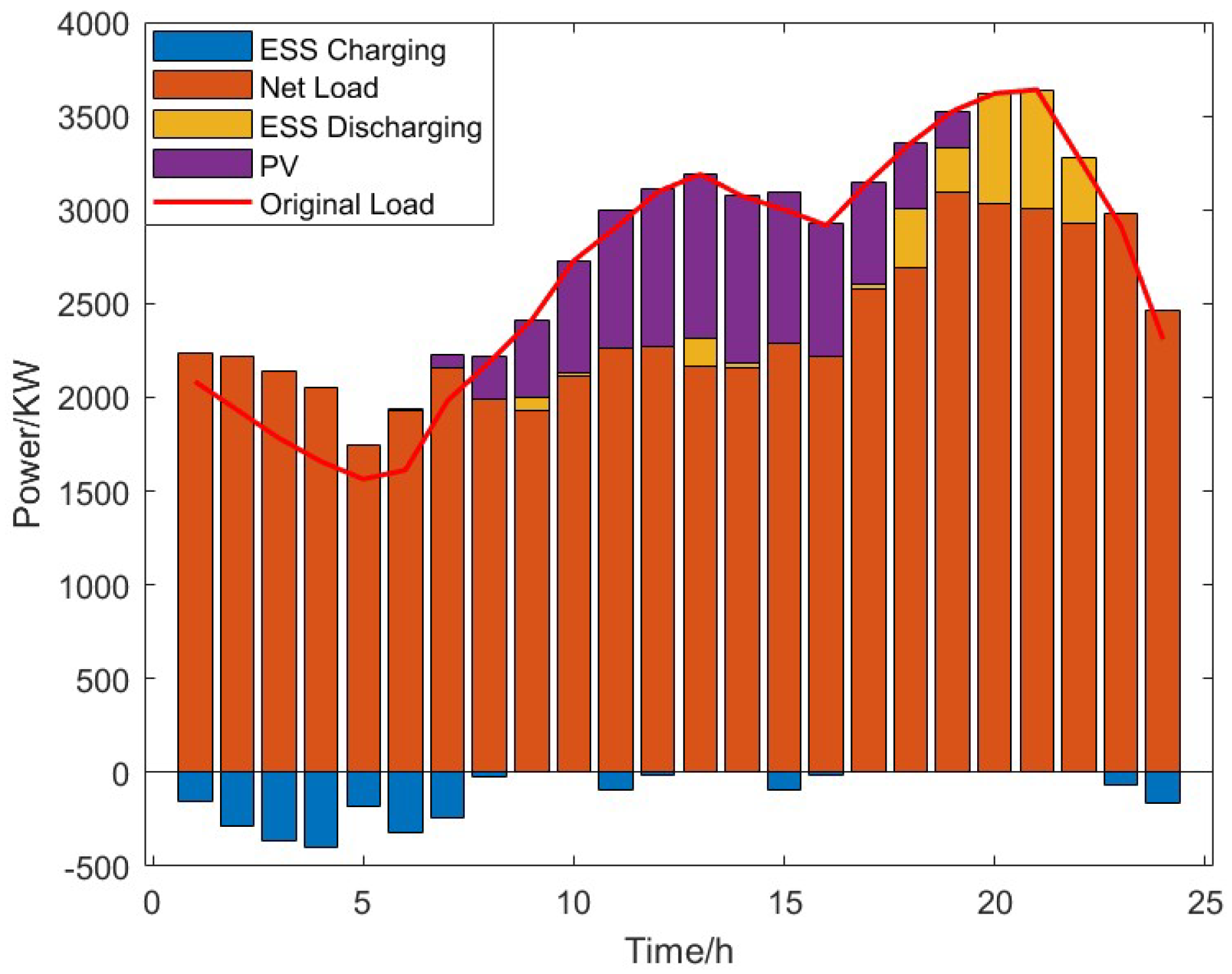
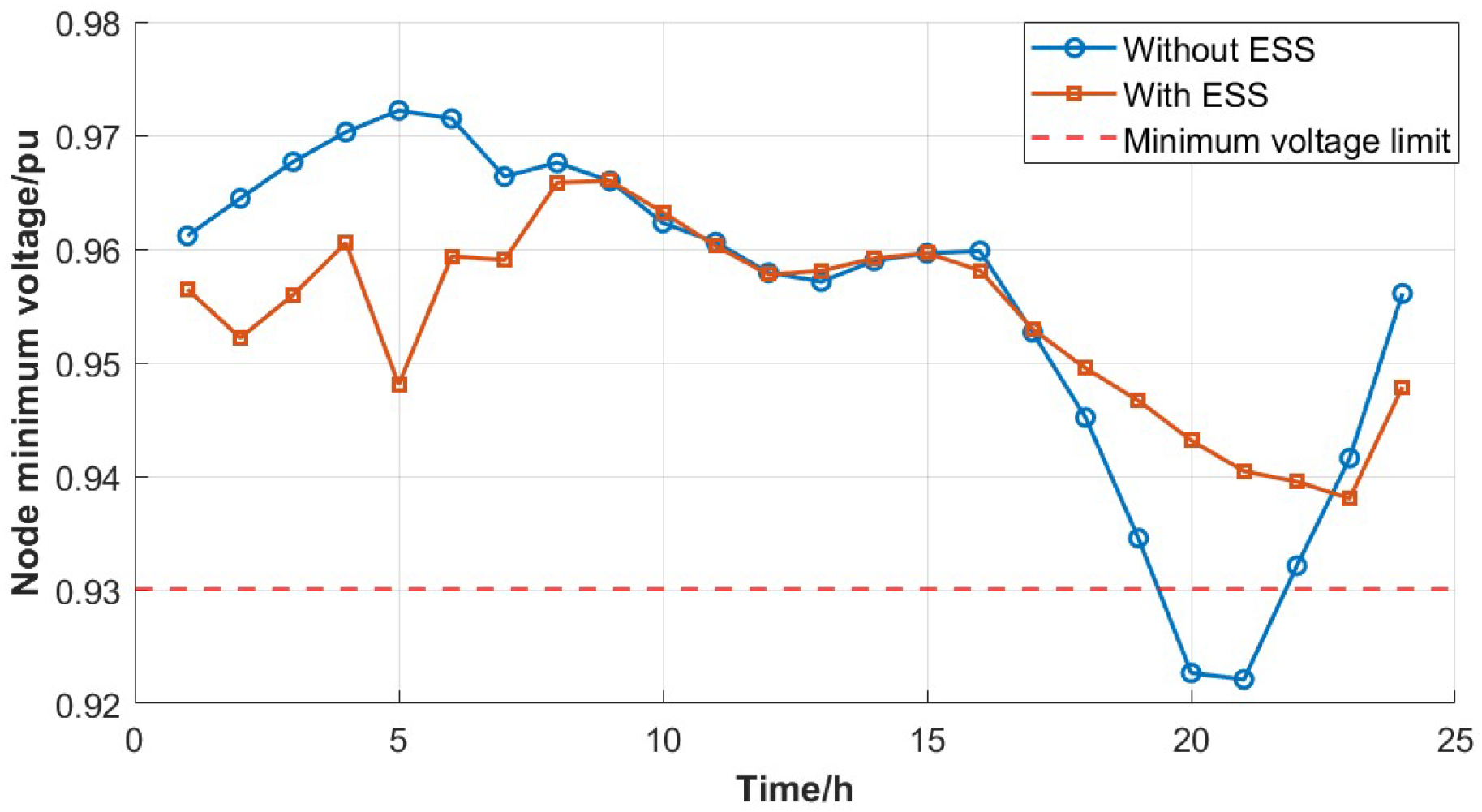
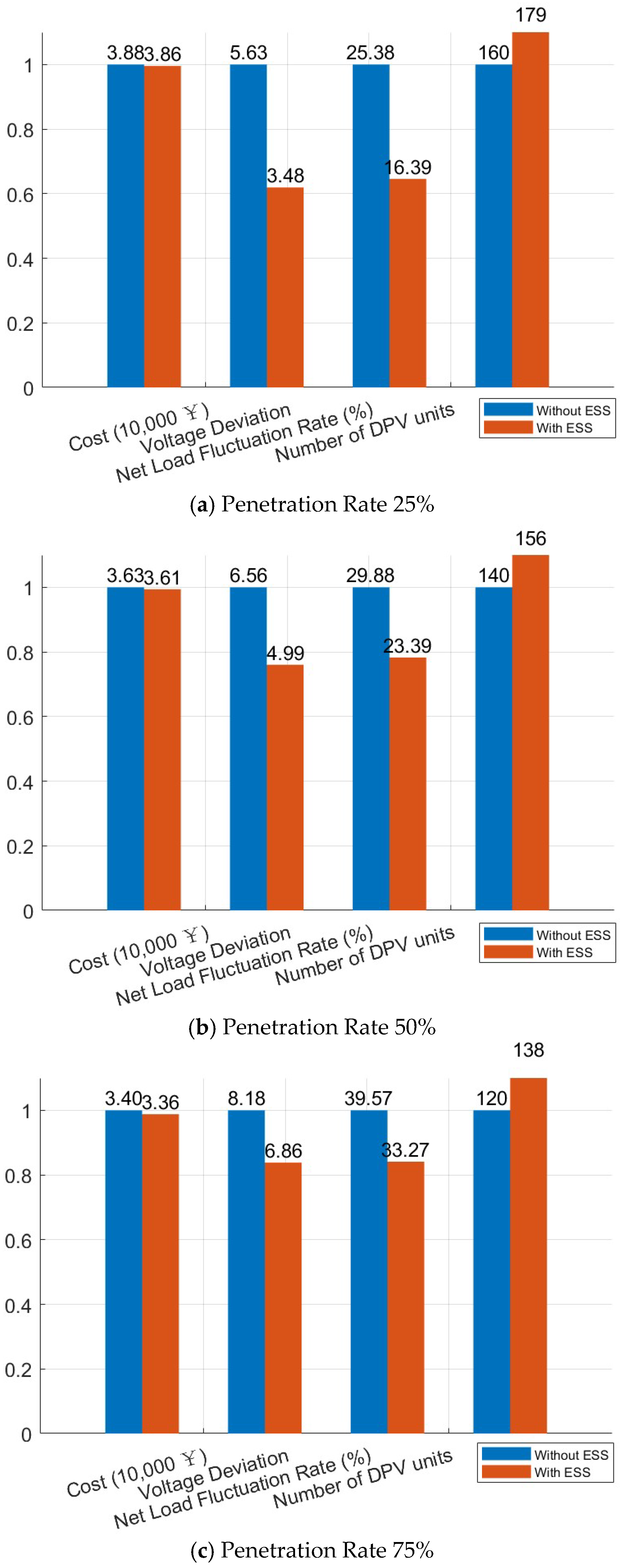
Owing to the rapid development of renewable energy, more DPVs are being injected into distribution networks. DPV hosting capacity and the stable operation of distribution networks are issues of broad concern. ESSs hold flexible charging and discharging characteristics, which provide an effective means for solving these problems. Thus, a two-layer, double-stage ESS configuration method was proposed. An ESS configuration model was constructed with two layers and two stages. The outer layer is a configuration layer for the ESS position and capacity. The two stages of the inner layer include the current network operation optimization stage and the hosting capacity improvement stage. Solving strategies and algorithms were well designed according to the characteristics of different layers and stages. Simulations were conducted and the effectiveness of the proposed method was verified. By optimizing the ESS configuration, the cost, voltage deviation and net load fluctuation rate were all reduced, improving the operation performance of the distribution network. In addition, the hosting capacity of the DPV increased by nearly 12%.
Overall, the proposed two-layer, double-stage ESS configuration method demonstrates significant advantages in improving operation stability and DPV hosting capacity, providing a potential solution for large-scale DPV integration in the future. In the following study, uncertainty modeling of DPVs, practical concerns in ESS installation and operation, and a comprehensive evaluation of hosting capacity will be focused on for the practical engineering applications of the proposed method.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}