
Development of a Three-Phase Universal Programmable Electronic Load (UPEL) Using Adaptive Sliding Pulse Width Modulation (ASPWM) for Enhanced Power Electronics Performance

 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
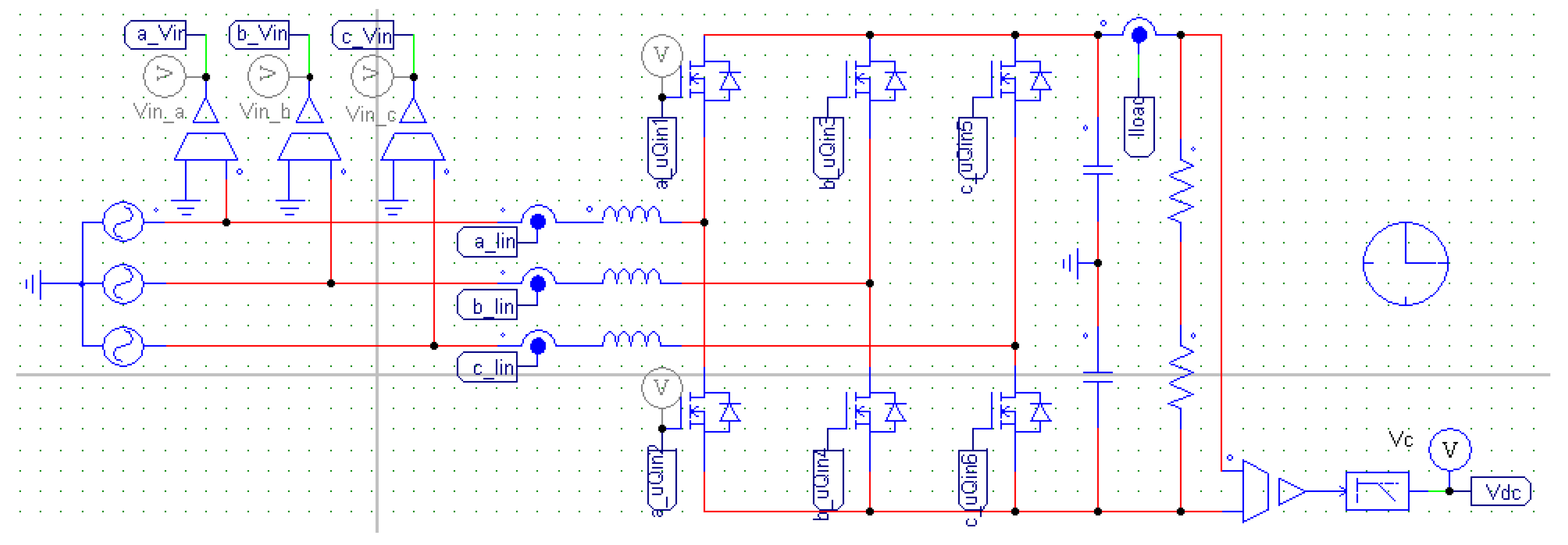
2. General Presentation of the Topology and Control
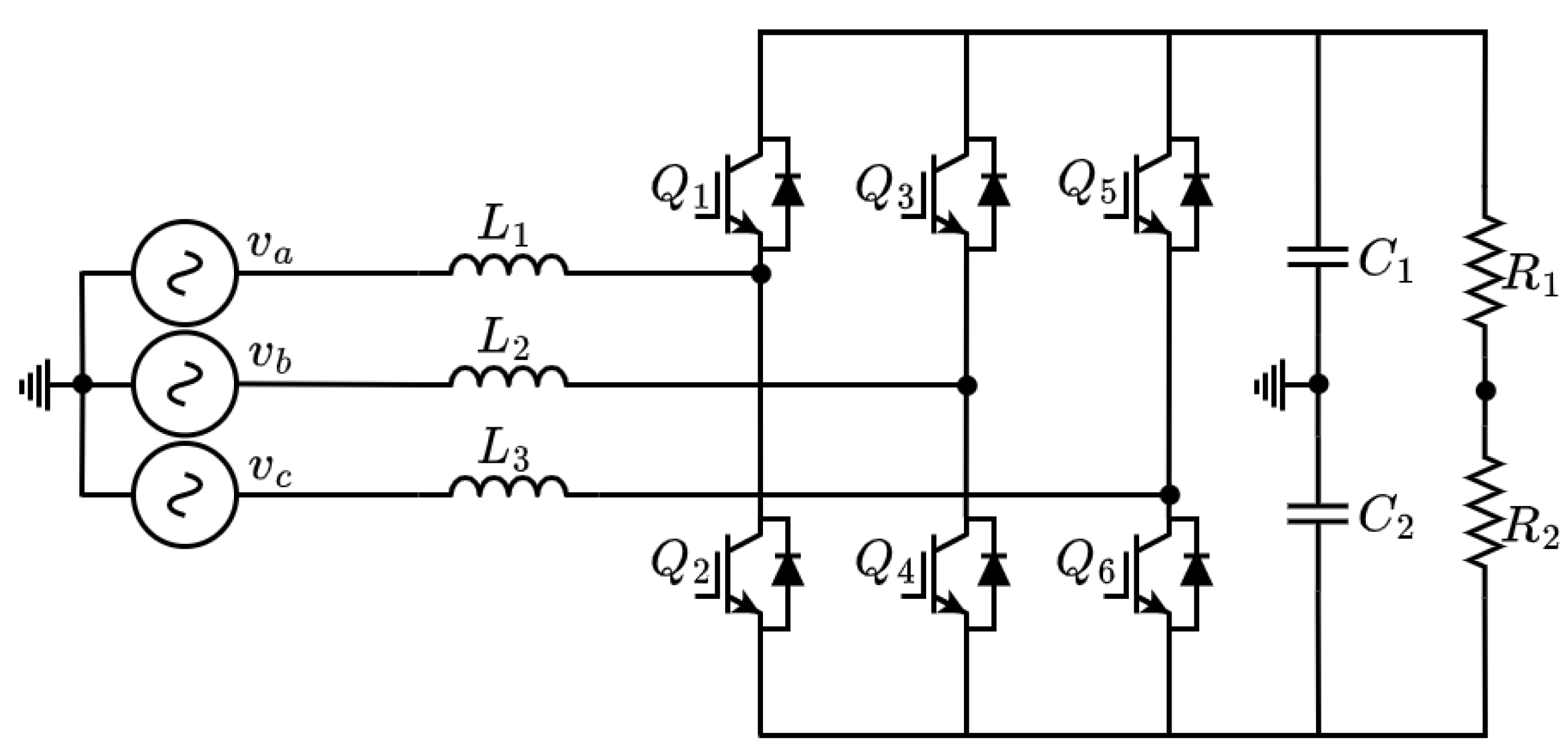
2.1. Three-Phase Inverter Topology: Three Branches, Four Wires
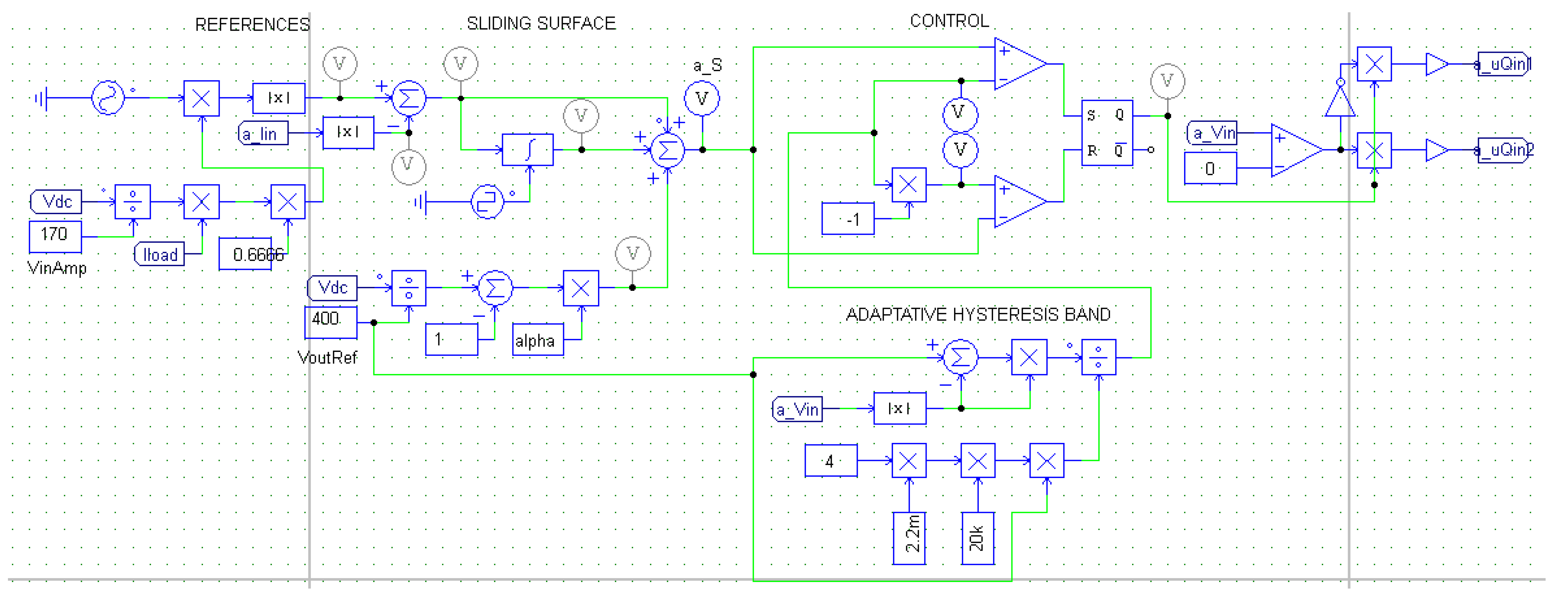
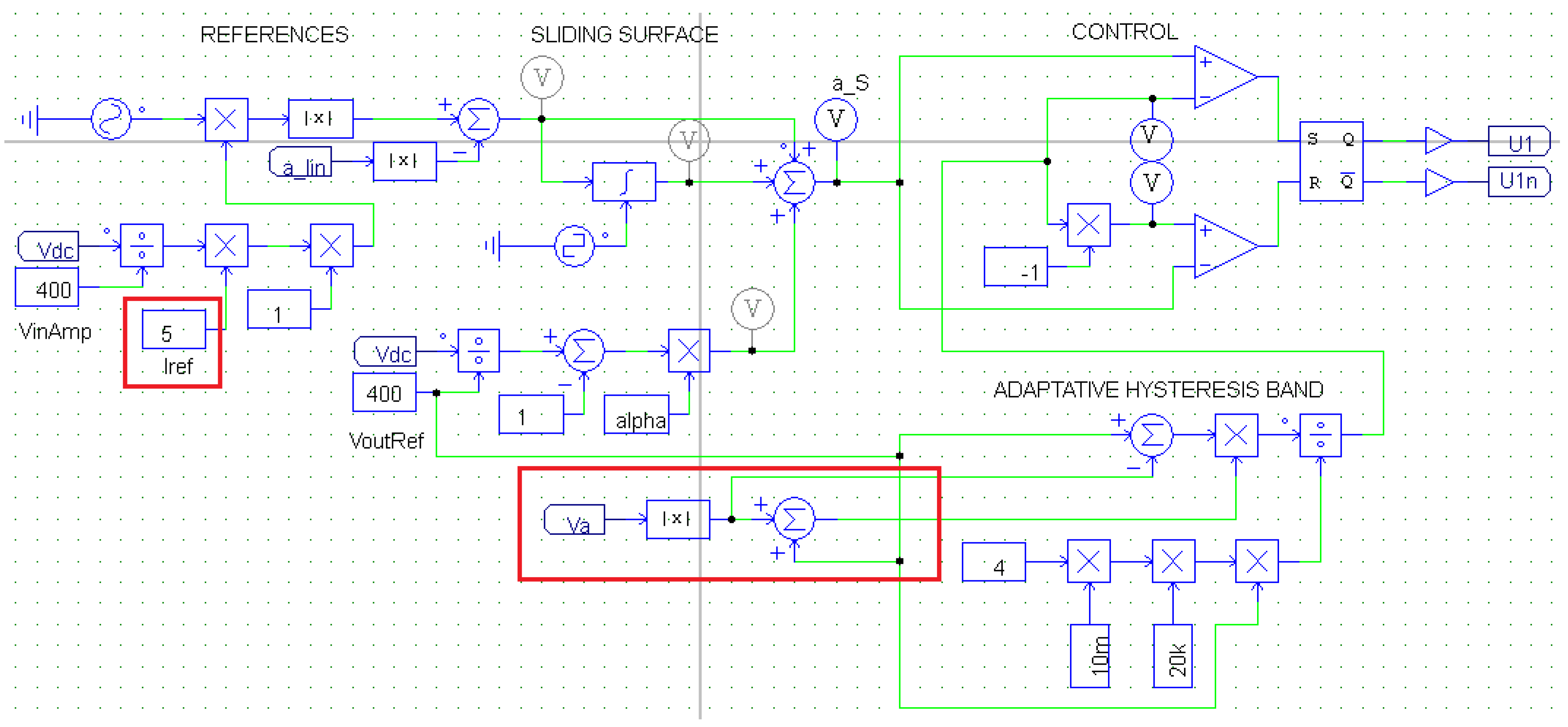
2.2. Adaptive Sliding Pulse Width Modulation
2.2.1. Sliding Surface
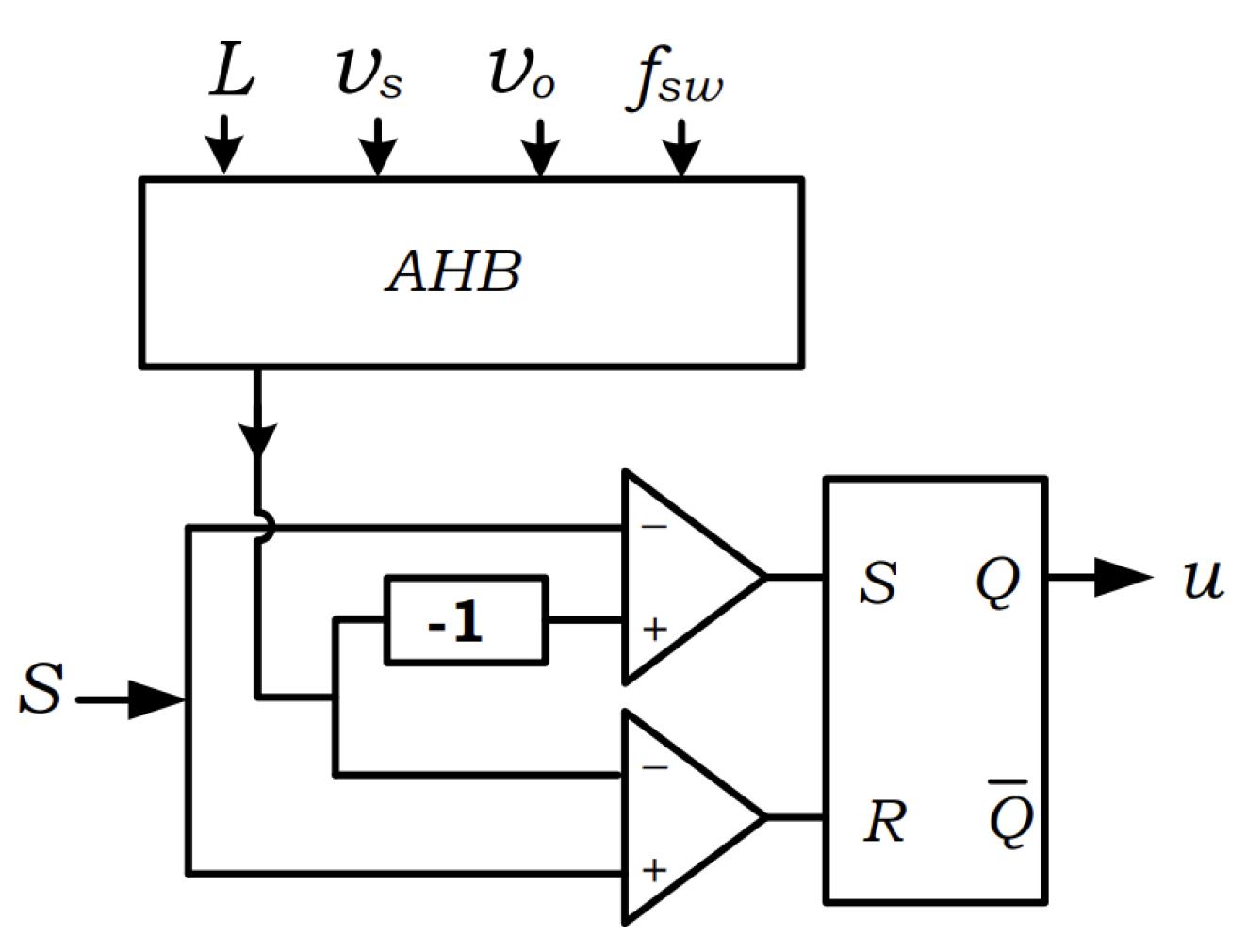
2.2.2. Adaptive Hysteresis Band
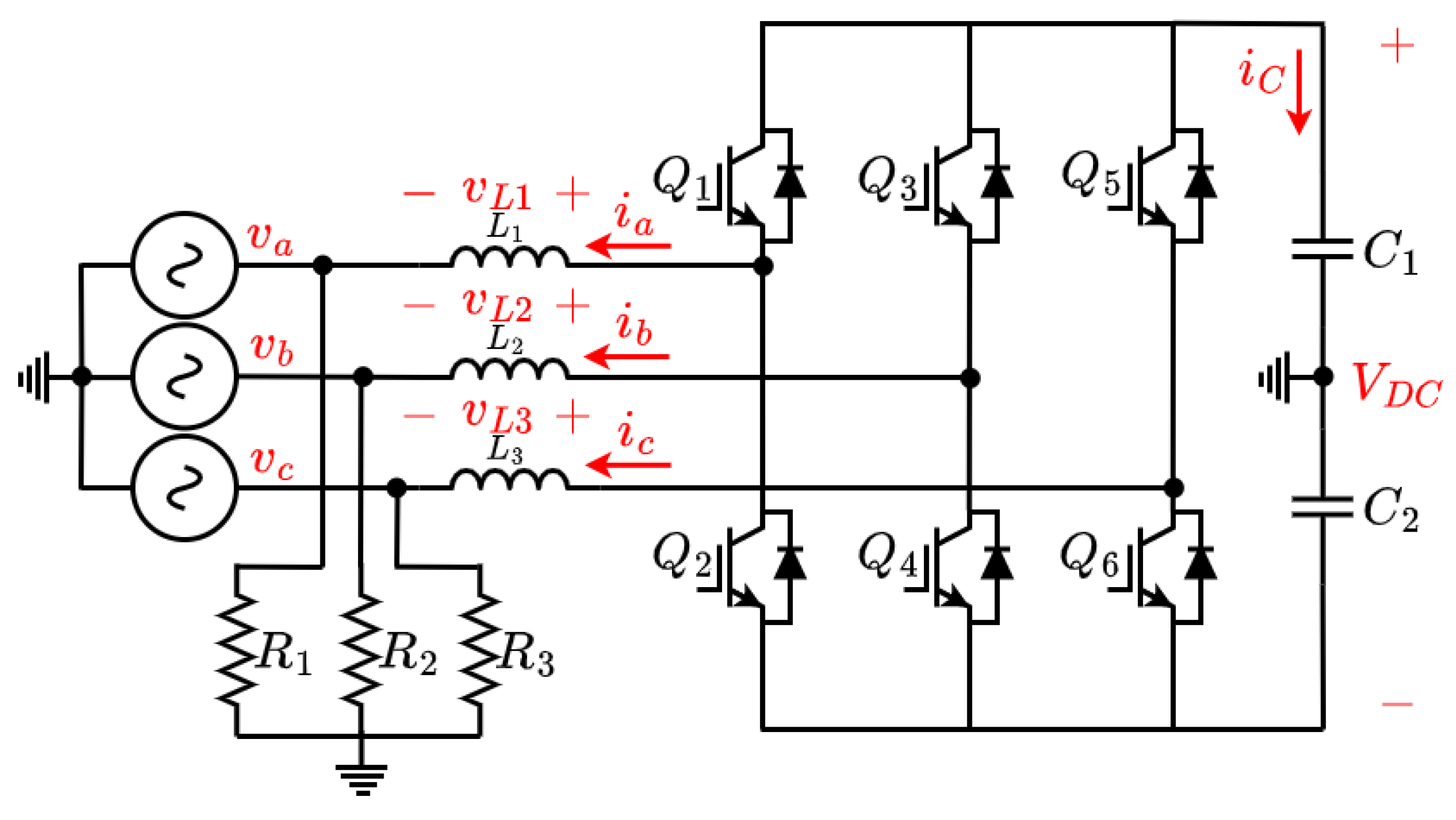
3. UPEL Operation as AC/DC Rectifier
3.1. Operating Principle
3.2. Adaptive Hysteresis Band
4. UPEL Operation as Three-Phase DC/AC Inverter
4.1. Operating Principle
4.2. Adaptive Hysteresis Band
4.3. SMC Validation
- Transversality Condition: This evaluates if the inverter can be controlled using the control signal u according to Equation (9). This condition is fulfilled considering Equation (10) obtained to solve Equation (9) with Equations (1), (5) and (6), and evaluating in the system limits according to . The right side of Equation (10) is multiplied by 3 if the inverter is three-phase; nevertheless, operation as single-phase (Equation (10)) is more restrictive; therefore, this paper works with this restriction.
- Existence Condition: This ensures the existence of sliding mode around , such that the inverter must remain within the sliding surface when (Equation (11)), ensuring with . Under these conditions, the inverter remains controlled around the equilibrium point.Equation (12) provides the second condition for , which was obtained by solving Equation (11) with Equations (1), (5), and (6), and evaluating system boundaries in steady state: left side for and right side for . This condition is more restrictive than the transversality (Equation (10)).Finally, the logic control to satisfy the existence condition is presented in Equation (13). This logic is contrary to operation as rectifier.
- Equivalent control condition: This evaluates the system dynamics under ideal operating conditions with infinite switching frequency (Equation (14)) based on Equations (1), (5), and (6). The condition for ensuring equivalent control is Equation (12), which corresponds to the existence constraint for the entire range of operation, except in zero crossings.
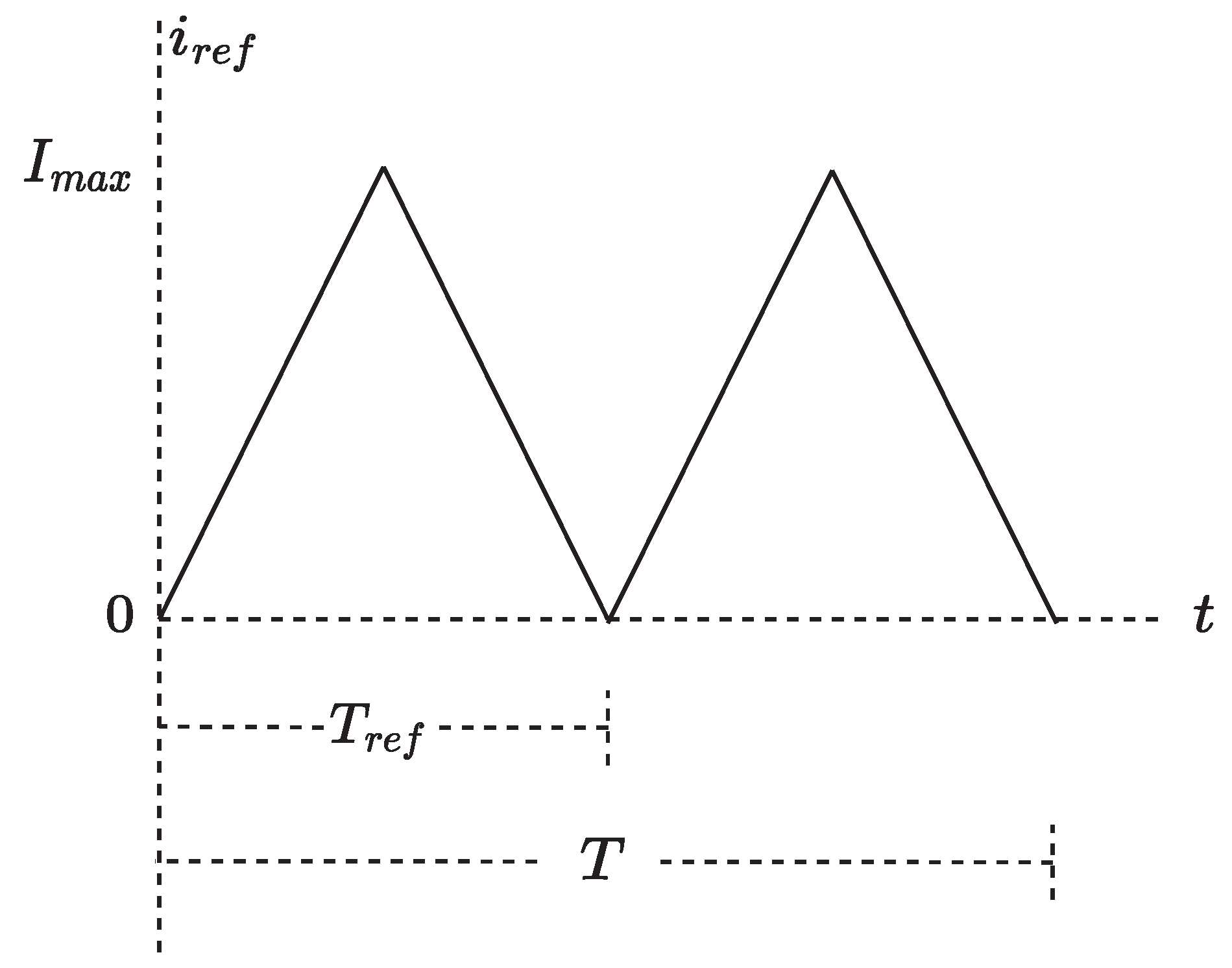
5. UPEL Operation as Distorted Current Source
5.1. Mathematical Modeling
5.2. Adaptive Hysteresis Band
5.3. SMC Validation
- Transversality Condition: This evaluates if the converter can be controlled using the control signal u according to Equation (9). This condition is fulfilled considering Equation (19) obtained to solve Equation (9) with Equations (1)–(3), and evaluating in the system limits according to . The operation as a single phase (Equation (10)) is more restrictive; therefore, this paper works with this restriction.
- Existence Condition: This ensures the existence of sliding mode around . The inverter must remain within the sliding surface when (Equation (11)), ensuring with . Under these conditions, the inverter remains controlled around the equilibrium point.Equation (20) provides the second condition for , which was obtained by solving Equation (11) with Equations (1)–(3), evaluating in the boundary of the system in steady state: left side for and the right side for .Finally, the logic control to satisfy the existence condition is presented in Equation (21). This logic is the same for the operation as a DC/DC converter or AC/DC rectifier.
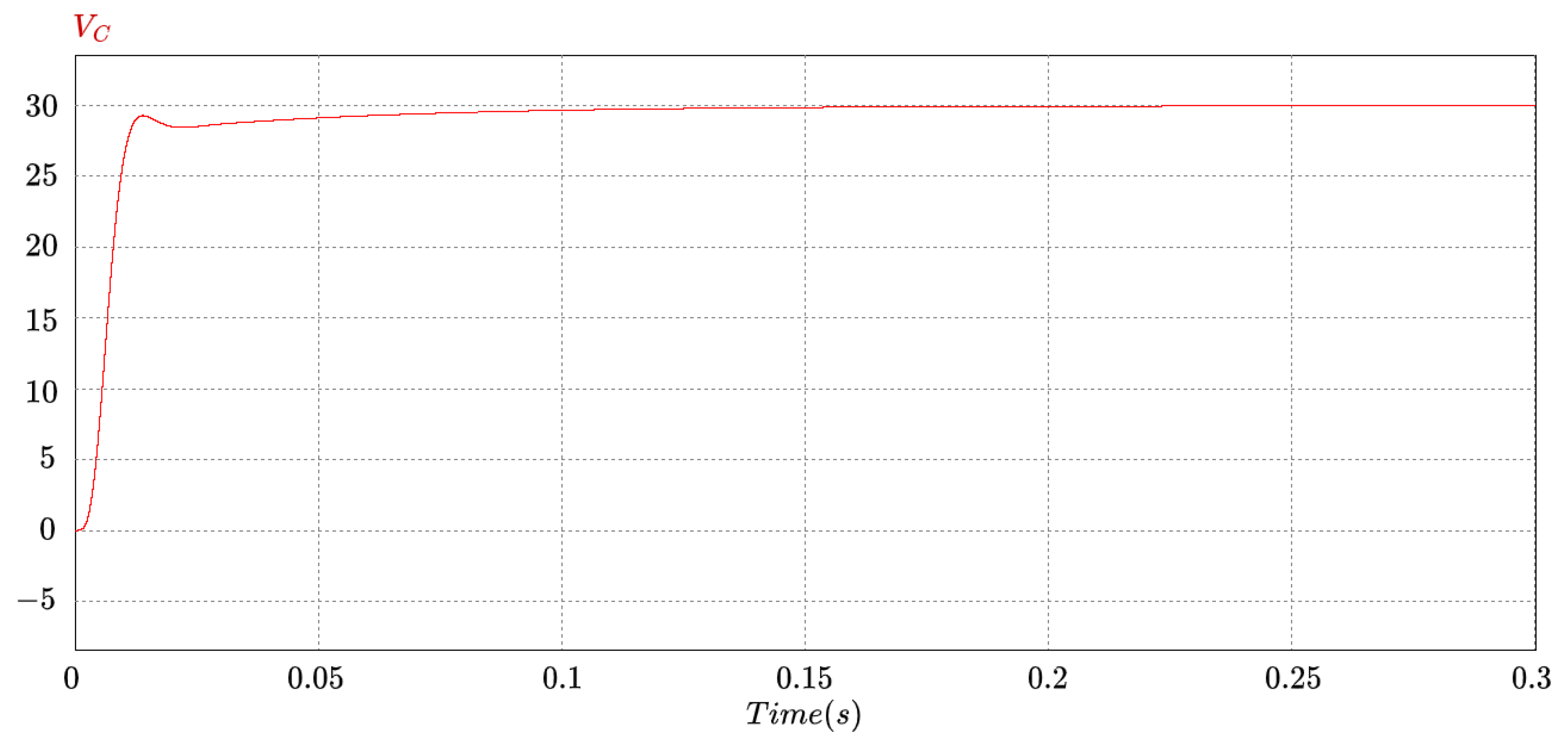
6. Simulation Results
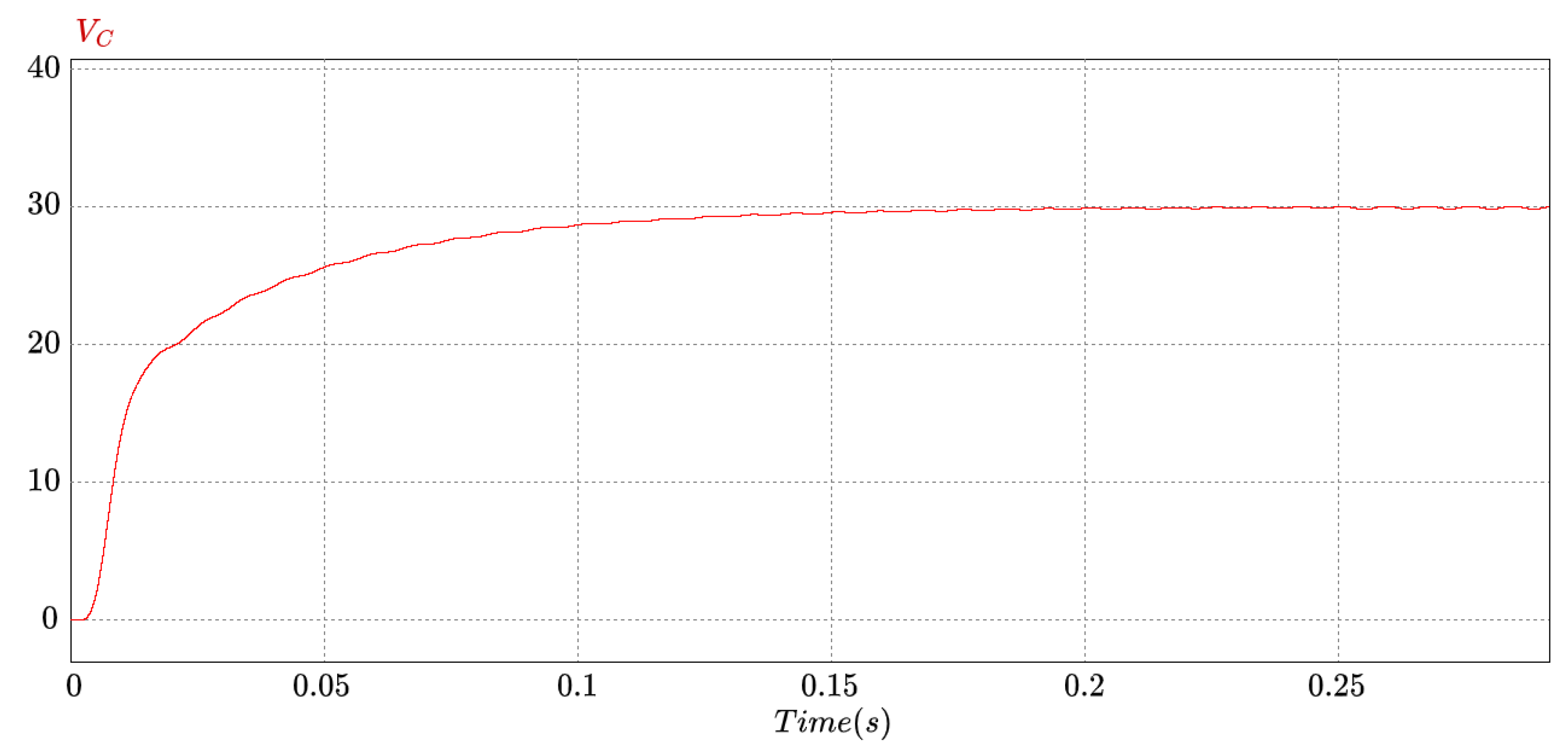
6.1. UPEL Operation as Rectifier
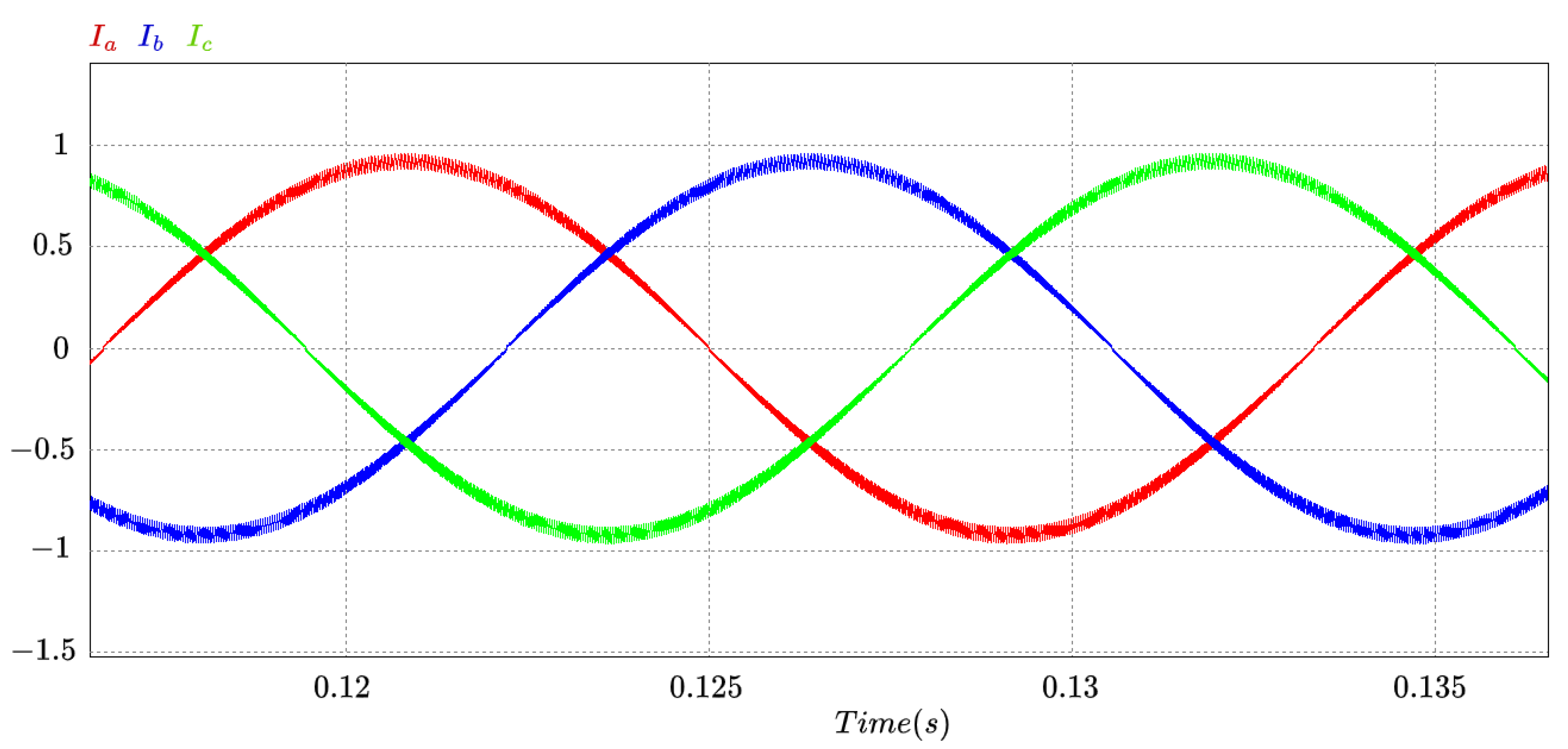
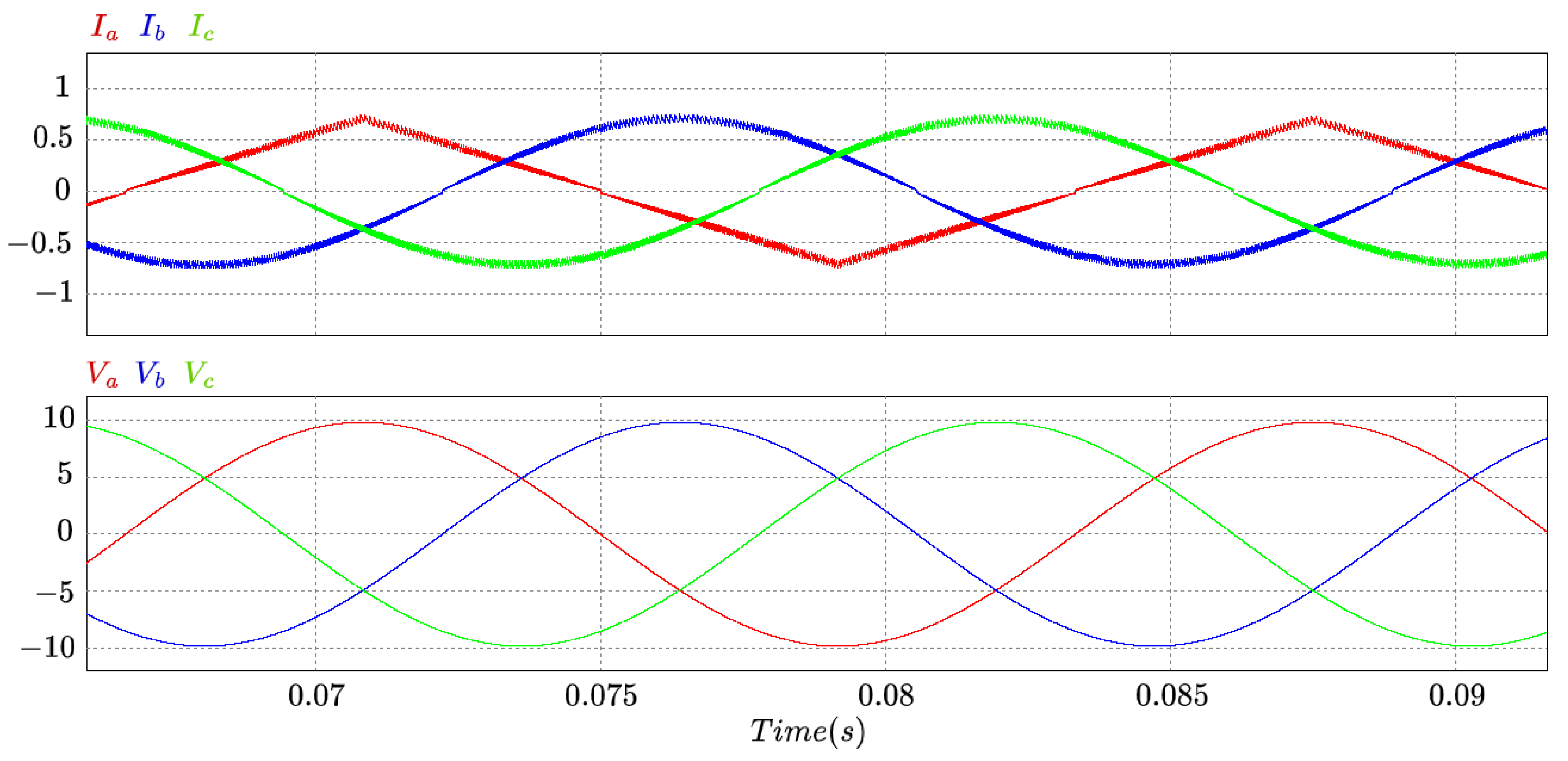
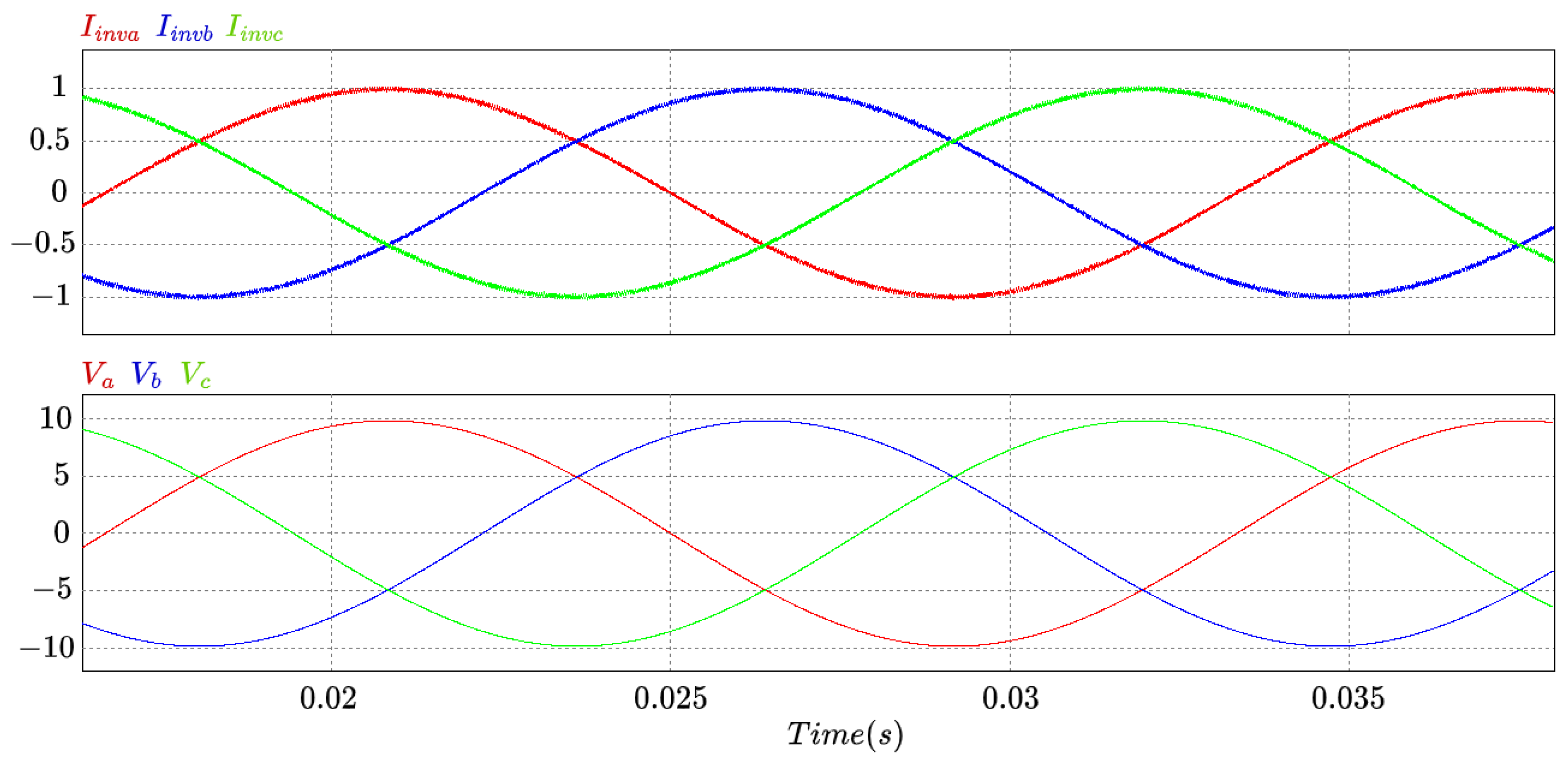
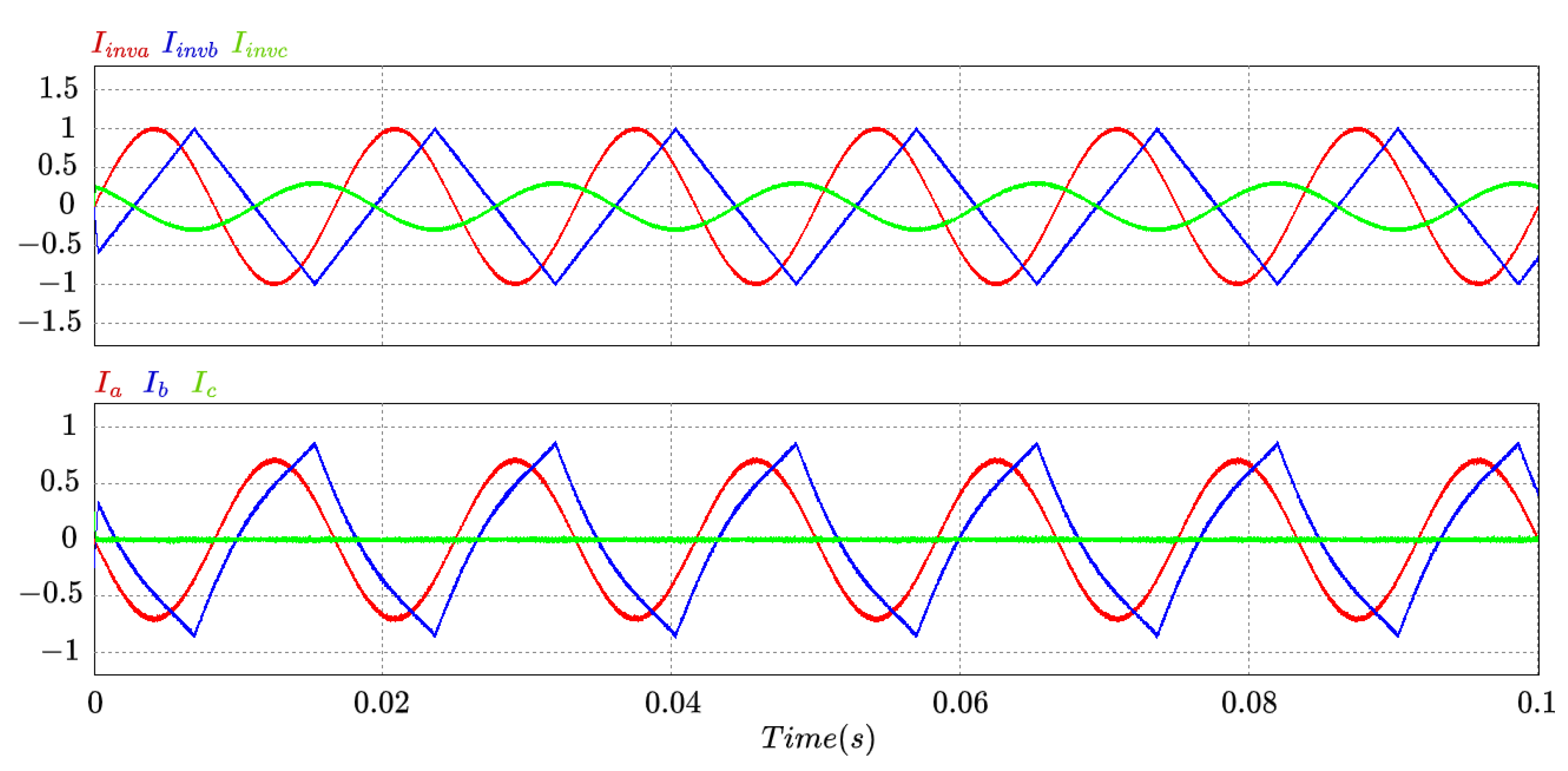
6.2. UPEL Operation as Three-Phase Inverter
7. Experimental Results
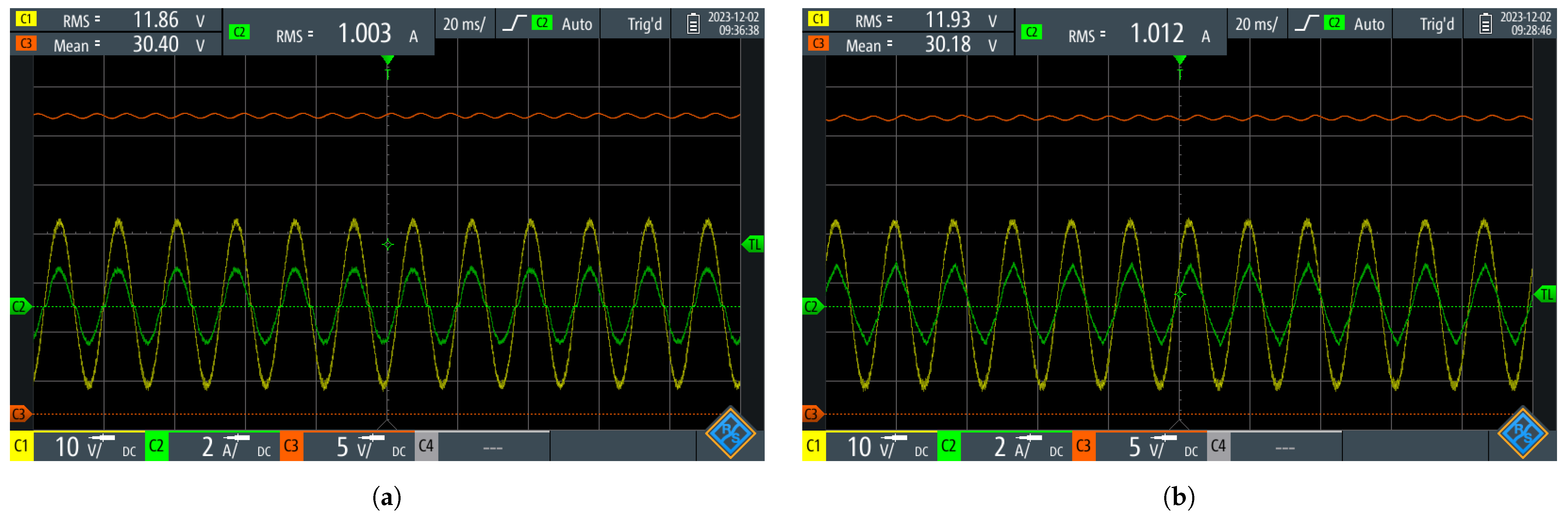
7.1. First Test: Controlled Rectifier
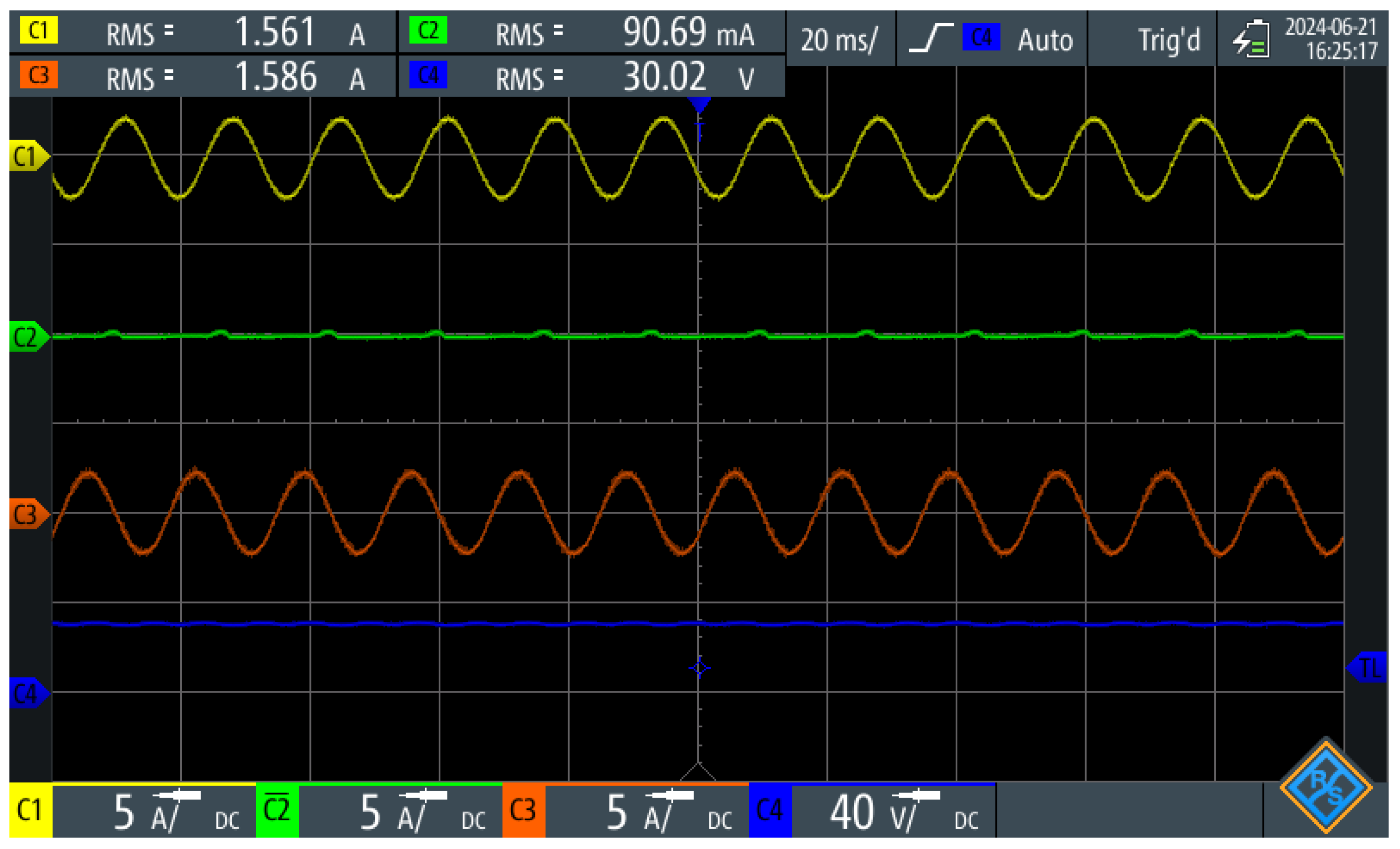
7.2. Second Test: Inverter
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Medina-Ortega, C.E.; Patiño-Noguera, M.A.; Revelo-Fuelagán, J.; Candelo-Becerra, J.E. Programmable Electronic Load Prototype for the Power Quality Analysis of an Experimental Microgrid. Sustainability 2022, 14, 11258. [Google Scholar] [CrossRef]
- Davis, P.N.; Wright, P.S. An Electronic Load to Verify Harmonic Emission Compliance. IEEE Trans. Instrum. Meas. 2017, 66, 1446–1453. [Google Scholar] [CrossRef]
- Geng, Z.; Gu, D.; Hong, T.; Czarkowski, D. Programmable Electronic AC Load Based on a Hybrid Multilevel Voltage Source Inverter. IEEE Trans. Ind. Appl. 2018, 54, 5512–5522. [Google Scholar] [CrossRef]
- De Rezende, G.M.; De Almeida, M.V.; Sá Ferreira, T.D.; De Sousa, C.V.; Mendes, V.F. Regenerative Active Electronic Load With Current, Voltage and Frequency Control for Power Transformer Testing. IEEE Access 2021, 9, 65319–65329. [Google Scholar] [CrossRef]
- Yang, Q.; He, M.; Xu, J.h.; Li, X.; Zhu, J.; Zhang, Z.; Gu, Z.; Ren, X.; Chen, Q. Wide Input Voltage DC Electronic Load Architecture With SiC MOSFETs for High Efficiency Energy Recycling. IEEE Trans. Power Electron. 2020, 35, 13053–13067. [Google Scholar] [CrossRef]
- Park, B.W.; Park, S.J.; Kang, F.S. Electronic Load System With Interleaved Structure Applicable to DC, Single-Phase AC, and Three-Phase AC. IEEE Access 2022, 10, 58677–58688. [Google Scholar] [CrossRef]
- Upadhyay, S.; Mishra, S.; Joshi, A. A Wide Bandwidth Electronic Load. IEEE Trans. Ind. Electron. 2012, 59, 733–739. [Google Scholar] [CrossRef]
- Primavera, S.; Rella, G.; Maddaleno, F.; Smedley, K.; Abramovitz, A. One-cycle controlled three-phase electronic load. IET Power Electron. 2012, 5, 827–832. [Google Scholar] [CrossRef]
- Kazerani, M. A high-performance controllable AC load. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 442–447. [Google Scholar] [CrossRef]
- Younsi, S.; Hamrouni, N. Control of Grid Connected Three-Phase Inverter for Hybrid Renewable Systems using Sliding Mode Controller. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 336–341. [Google Scholar] [CrossRef]
- Mahlooji, M.H.; Mohammadi, H.R.; Rahimi, M. A review on modeling and control of grid-connected photovoltaic inverters with LCL filter. Renew. Sustain. Energy Rev. 2018, 81, 563–578. [Google Scholar] [CrossRef]
- Roodsari, B.N.; Nowicki, E.P. Analysis and Experimental Investigation of the Improved Distributed Electronic Load Controller. IEEE Trans. Energy Convers. 2018, 33, 905–914. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X.; Zhang, Y.; Zhang, C.; Deng, W. A Novel Current Control Method Based on Dual-Mode Structure Repetitive Control for Three-Phase Power Electronic Load. IEEE Access 2021, 9, 144406–144416. [Google Scholar] [CrossRef]
- Errouissi, R.; Muyeen, S.M.; Al-Durra, A.; Leng, S. Experimental Validation of a Robust Continuous Nonlinear Model Predictive Control Based Grid-Interlinked Photovoltaic Inverter. IEEE Trans. Ind. Electron. 2016, 63, 4495–4505. [Google Scholar] [CrossRef]
- de Brito, M.A.G.; Dourado, E.H.B.; Sampaio, L.P.; da Silva, S.A.O.; Garcia, R.C. Sliding Mode Control for Single-Phase Grid-Connected Voltage Source Inverter with L and LCL Filters. Eng 2023, 4, 301–316. [Google Scholar] [CrossRef]
- Rayane, K.; Bougrine, M.; Benalia, A.; Guesmi, K. Sliding Mode Control of a Three-Phase Inverter with an Output LC Filter. In Proceedings of the 2018 International Conference on Applied Smart Systems (ICASS), Medea, Algeria, 24–25 November 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Guo, B.; Su, M.; Wang, H.; Tang, Z.; Liao, Y.; Zhang, L.; Shi, S. Observer-based second-order sliding mode control for grid-connected VSI with LCL-type filter under weak grid. Electr. Power Syst. Res. 2020, 183, 106270. [Google Scholar] [CrossRef]
- Dang, C.; Tong, X.; Song, W. Sliding-mode control in dq-frame for a three-phase grid-connected inverter with LCL-filter. J. Frankl. Inst. 2020, 357, 10159–10174. [Google Scholar] [CrossRef]
- Sufyan, A.; Jamil, M.; Ghafoor, S.; Awais, Q.; Ahmad, H.A.; Khan, A.A.; Abouobaida, H. A Robust Nonlinear Sliding Mode Controller for a Three-Phase Grid-Connected Inverter with an LCL Filter. Energies 2022, 15, 9428. [Google Scholar] [CrossRef]
- Liang, Y.; Nwankpa, C. A power-line conditioner based on flying-capacitor multilevel voltage-source converter with phase-shift SPWM. IEEE Trans. Ind. Appl. 2000, 36, 965–971. [Google Scholar] [CrossRef]
- Yu, H.; Chen, B.; Yao, W.; Lu, Z. Hybrid Seven-Level Converter Based on T-Type Converter and H-Bridge Cascaded Under SPWM and SVM. IEEE Trans. Power Electron. 2018, 33, 689–702. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. A Modified Hysteresis-Modulation-Based Sliding Mode Control for Improved Performance in Hybrid DC–DC Boost Converter. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1683–1687. [Google Scholar] [CrossRef]
- Mejía-Ruiz, G.E.; Muñoz-Galeano, N.; Ortiz-Castrillón, J.R. Banda de Histéresis Adaptativa para un Convertidor AC-DC Elevador sin Puente, con Correccion del Factor de Potencia y Control por Modos Deslizantes. Inf. Tecnológica 2019, 30, 283–292. [Google Scholar] [CrossRef]
- Ortiz-Castrillón, J.R.; Mejía-Ruiz, G.E.; Muñoz-Galeano, N.; López-Lezama, J.M.; Cano-Quintero, J.B. A Sliding Surface for Controlling a Semi-Bridgeless Boost Converter with Power Factor Correction and Adaptive Hysteresis Band. Appl. Sci. 2021, 11, 1873. [Google Scholar] [CrossRef]
- Ortiz-Castrillón, J.R.; Saldarriaga-Zuluaga, S.D.; Muñoz-Galeano, N.; López-Lezama, J.M.; Benavides-Córdoba, S.; Cano-Quintero, J.B. Optimal Sliding-Mode Control of Semi-Bridgeless Boost Converters Considering Power Factor Corrections. Energies 2023, 16, 6282. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61000-3-2; Electromagnetic compatibility (EMC)—Part 3-2: Limits—Limits for harmonic current emissions (equipment input current lower or equal 16 A per phase). International Electrotechnical Commission: Geneva, Switzerland, 2020. [Google Scholar]
- Institute of Electrical and Electronics Engineers. IEEE 519-2022; IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. Institute of Electrical and Electronics Engineers: New York, NY, USA, 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | ASPWM | SPWM | SVM | Hysteresis SMC |
|---|---|---|---|---|
| Switching Frequency Stability | Fixed | Fixed | Fixed | Variable |
| Harmonic Distortion (THD) | Low | Moderate | Low | High |
| Dynamic Response Speed | Fast | Slow | Moderate | Fast |
| Computational Complexity | Moderate | Low | High | Low |
| Power Factor Control | Yes | Limited | Yes | Limited |
| Performance with Nonlinear Loads | Excellent | Poor | Good | Moderate |
| Frequency Stability | High | High | High | Low |
| Harmonic Injection Capability | Yes | No | Limited | Limited |
| Robustness to Parameter Variations | High | Low | Moderate | High |
| Implementation Complexity | Moderate | Low | High | Low |
| Parameter | Value |
|---|---|
| Grid voltage | 12 Vrms, 60 Hz |
| DC bus capacitor | 2200 μF |
| DC bus voltage | 30 V |
| Inductors | 23 mH–10 mH |
| Switching frequency | 40 kHz |
| Load | 108 |
| Parameter | Single Phase Results | Three Phase Results |
|---|---|---|
| Input Voltage (RMS) | 12 V | 12 V per phase |
| DC Bus Voltage | 30 V | 30 V |
| Load Resistance | 108 | 3 × 108 |
| Switching Frequency | 40 kHz | 40 kHz |
| Input Current (RMS) | 1 A | 1.56 A (Phase A, C), 0 A (Phase B) |
| Current Reference Waveform | Sinusoidal/Triangular | Sinusoidal/Triangular (Phase A) |
| Power Factor (PF) | ≈0.99 | ≈0.99 |
| Transient Response (Load Step) | <0.5 ms | <1 ms |
| Parameter | Measured Value |
|---|---|
| Grid voltage () | 12 Vrms, 60 Hz |
| DC bus voltage () | 30 V |
| Phase A current (balanced) | 1.54 Apeak |
| Phase A current (distorted) | 1 Apeak, Phase shift: 90°, Triangle waveform |
| Phase B and C currents | Balanced: 120° shift, Unbalanced: 180° and 270° shift |
| Phase B load variation | Initial: 0 A, Final: 2 Apeak |
| THD in current | Adjustable |
| Power factor | Adjustable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortiz-Castrillón, J.R.; Saldarriaga-Zuluaga, S.D.; Muñoz-Galeano, N.; López-Lezama, J.M.; Benavides-Córdoba, S. Development of a Three-Phase Universal Programmable Electronic Load (UPEL) Using Adaptive Sliding Pulse Width Modulation (ASPWM) for Enhanced Power Electronics Performance. Electronics 2025, 14, 1100. https://doi.org/10.3390/electronics14061100
Ortiz-Castrillón JR, Saldarriaga-Zuluaga SD, Muñoz-Galeano N, López-Lezama JM, Benavides-Córdoba S. Development of a Three-Phase Universal Programmable Electronic Load (UPEL) Using Adaptive Sliding Pulse Width Modulation (ASPWM) for Enhanced Power Electronics Performance. Electronics. 2025; 14(6):1100. https://doi.org/10.3390/electronics14061100
Chicago/Turabian StyleOrtiz-Castrillón, José R., Sergio D. Saldarriaga-Zuluaga, Nicolás Muñoz-Galeano, Jesús M. López-Lezama, and Santiago Benavides-Córdoba. 2025. "Development of a Three-Phase Universal Programmable Electronic Load (UPEL) Using Adaptive Sliding Pulse Width Modulation (ASPWM) for Enhanced Power Electronics Performance" Electronics 14, no. 6: 1100. https://doi.org/10.3390/electronics14061100
APA StyleOrtiz-Castrillón, J. R., Saldarriaga-Zuluaga, S. D., Muñoz-Galeano, N., López-Lezama, J. M., & Benavides-Córdoba, S. (2025). Development of a Three-Phase Universal Programmable Electronic Load (UPEL) Using Adaptive Sliding Pulse Width Modulation (ASPWM) for Enhanced Power Electronics Performance. Electronics, 14(6), 1100. https://doi.org/10.3390/electronics14061100