
Research on Distributed Optimization Scheduling and Its Boundaries in Virtual Power Plants


Abstract
1. Introduction
- (1)
- This paper proposes a time decoupling strategy based on Lyapunov optimization, which transforms the long-term optimization problem within the virtual power plant into multiple independent single-period optimization problems. This strategy significantly improves solution efficiency and has been validated for its feasibility and effectiveness in virtual power plants.
- (2)
- This paper adopts an ADMM distributed optimization framework, which further decomposes the single-period optimization problem into multiple subproblems. It is solved using a hybrid strategy-improved particle swarm optimization algorithm. This method not only enhances computational accuracy but also significantly increases solving speed.
- (3)
- A dynamic scheduling boundary model is constructed by utilizing the remaining adjustment capacity of the virtual power plant’s controllable devices. Based on this and combined with the time decoupling strategy and algorithm improvements, efficient, reliable characterization and rolling updates of the scheduling boundary are achieved, thereby effectively promoting the interaction between the virtual power plant and the distribution network.
2. VPP Operation Strategy and Mathematical Model
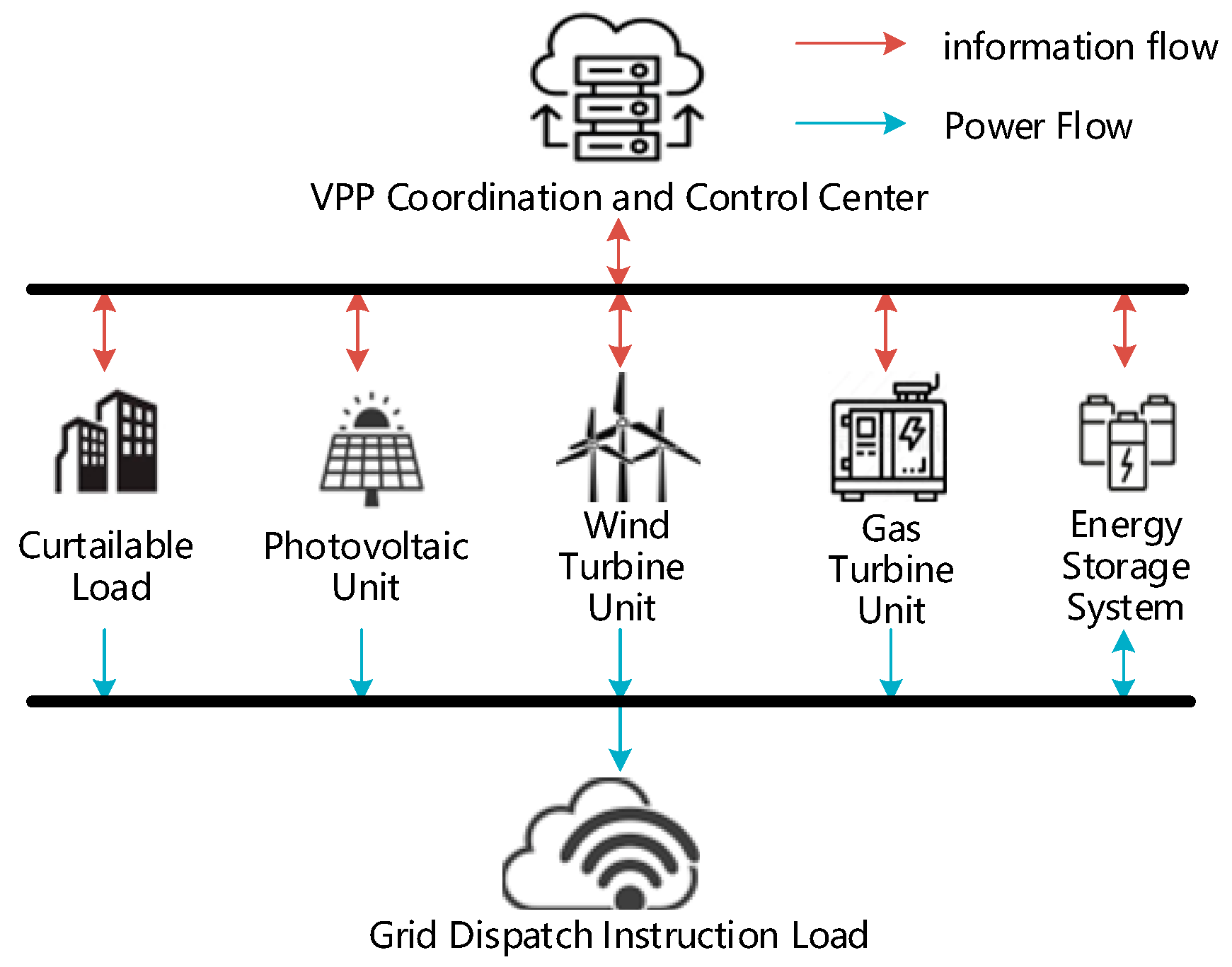
2.1. Structure of the Virtual Power Plant
- Completing the load plan predetermined with the distribution network:
- Characterizing the scheduling boundary for intra-day dispatch:
2.2. VPP Operation Strategy and Scheduling Process
2.3. Objective Function
2.4. Constraints
2.4.1. Power Balance Constraint
2.4.2. Energy Storage Battery Operation Constraint
2.4.3. The Reducible Load Constraint
2.4.4. Gas Turbine Constraints
2.4.5. Rotating Reserve Constraint
2.4.6. Surplus Power Feed-In Constraint
3. VPP Time Coupling Treatment and Problem Decomposition
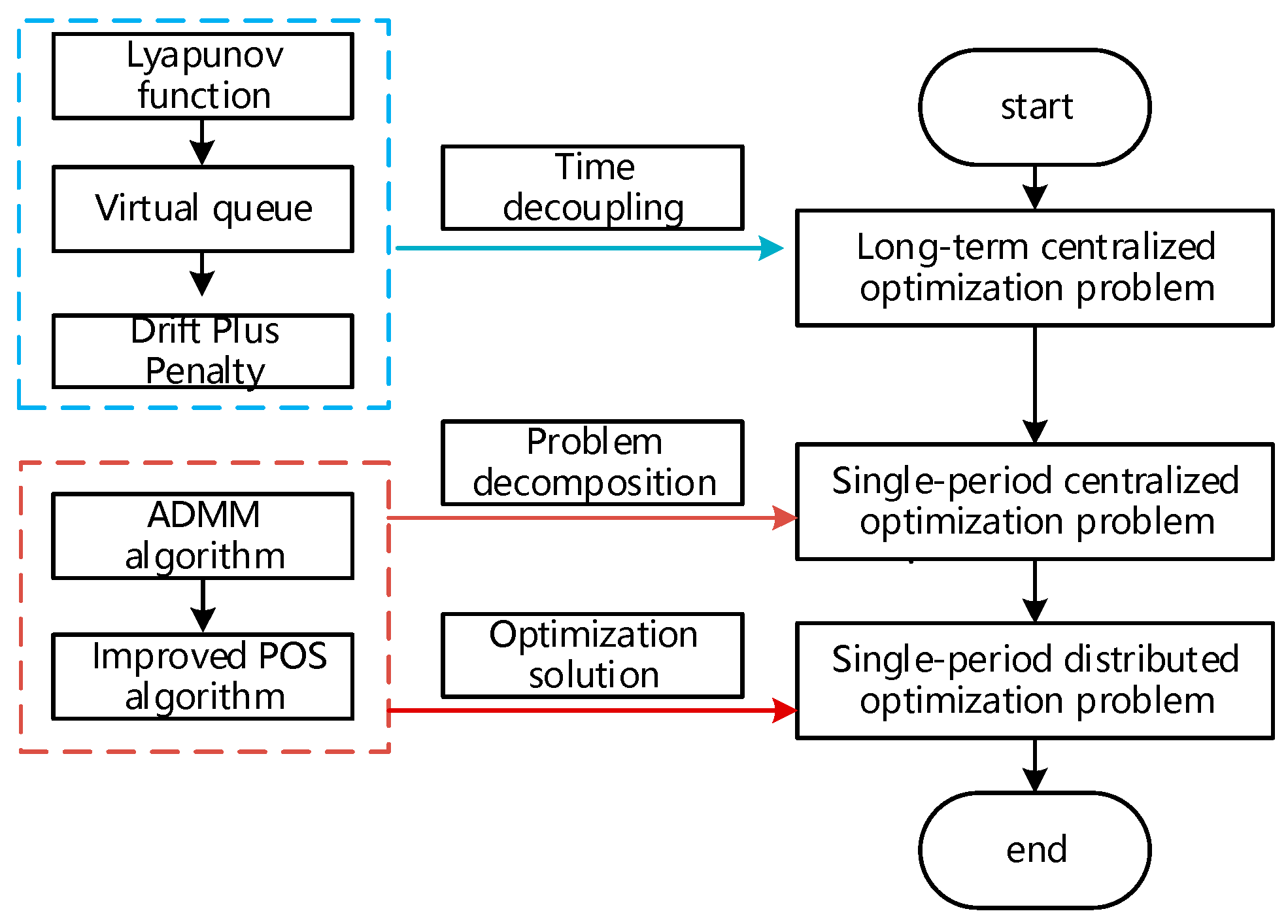
3.1. Overall Design Concept of Distributed Optimization
3.2. Lyapunov Optimization-Based Time Decoupling Strategy
3.3. Optimization Problem Transformation Based on Drift Plus Penalty
3.4. The Distributed Optimization Solution Method Based on ADMM-HSPSO
3.4.1. Optimization Problem Decomposition Based on ADMM
3.4.2. Subproblem Solving Based on Hybrid Strategy Improved PSO Algorithm
- Step 1: Sobol Sequence-Based Population Initialization
- Step 2: Adaptive Inertia Weight
- Step 3: Adaptive Cauchy Mutation Strategy
4. Interaction Between Dispatch Boundary and Distribution Network
4.1. Subsection Virtual Power Plant Dispatch Command Analysis
4.2. Wind–Solar Fluctuation Factor and Dispatch Boundary Characterization
5. Case Analysis
5.1. Case Parameter Settings
5.2. Effectiveness and Feasibility Verification of Time Decoupling
5.2.1. Validation of Time Decoupling Effectiveness
5.2.2. Feasibility Validation of Time Decoupling
5.3. HSPSO Algorithm Performance Analysis and Validation
5.4. Analysis of Dispatch Boundary Characterization
5.4.1. Results Analysis of Dispatch Boundary Characterization
5.4.2. Comparison of Virtual Power Plant Optimization and Interaction with the Distribution Network
5.4.3. Comparison of Dispatch Boundary Characterization Methods
6. Conclusions
- (1)
- Through the Lyapunov optimization theory, this paper successfully implements time decoupling within the virtual power plant, transforming the long-term optimization problem into multiple single-period optimization problems, which significantly reduces the complexity of the optimization problem. Taking a 2 h intra-day optimization scheduling for the VPP as an example, the solving time after decoupling is reduced by 86.11%, and the overall daily operational cost error is only 2.4%, which validates the feasibility and effectiveness of this strategy.
- (2)
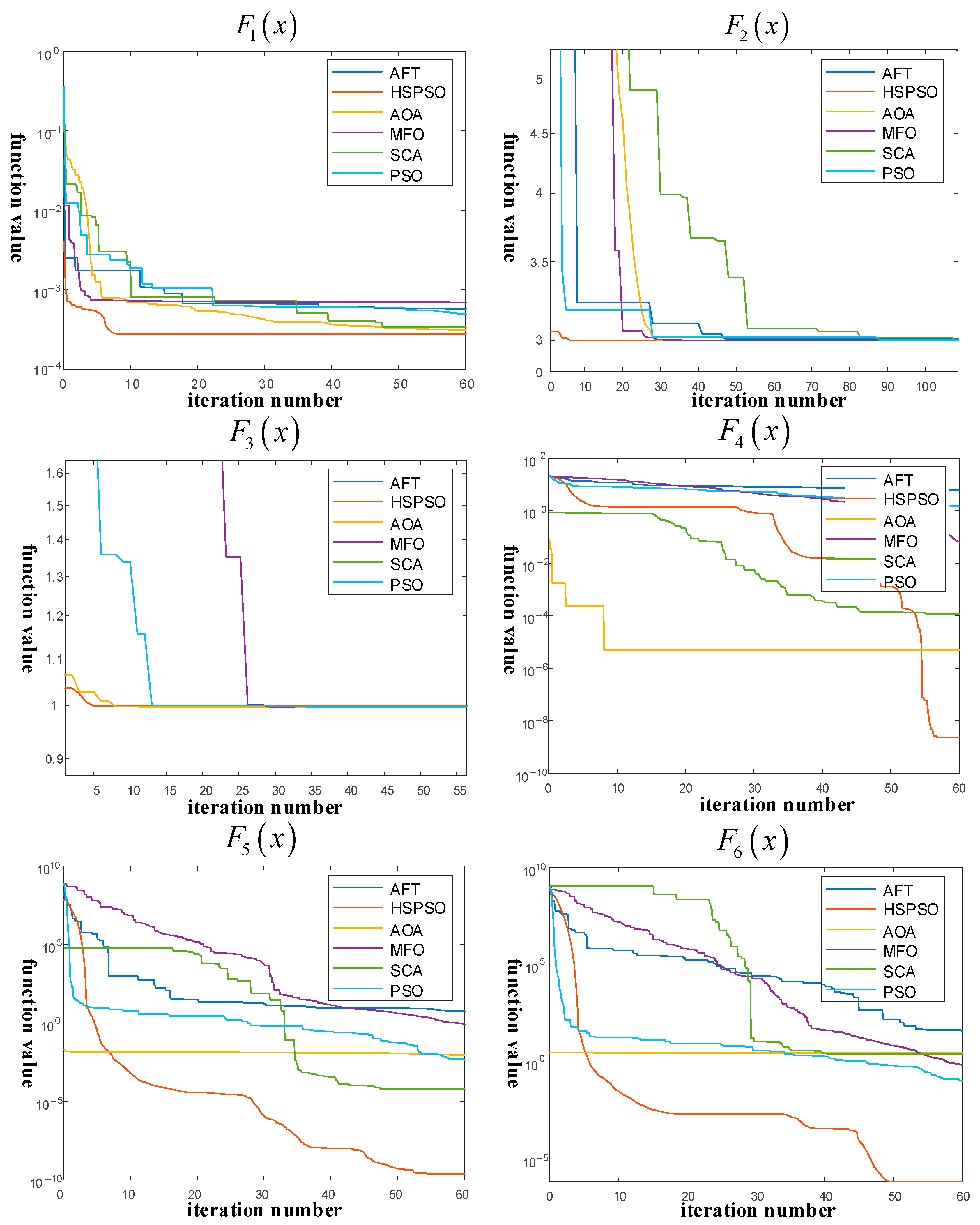
- The hybrid strategy improved Particle Swarm Optimization algorithm proposed in this paper shows significant advantages in both computational accuracy and solving speed. Test results demonstrate that the algorithm converges in fewer than 15 iterations for unimodal tests, and achieves an accuracy of 10−5 or better in multimodal tests, proving the efficiency and superiority of this algorithm.
- (3)
- Compared to the scenario generation method based on probability density functions, the scheduling boundary characterization method proposed in this paper offers higher reliability and computational efficiency. For example, for the 4 h period from 00:15 to 04:15, the scheduling boundary is characterized in 115 s with an execution probability of 100%. In contrast, the scenario generation method cannot guarantee a 100% execution probability for the scheduling boundary, and requires analysis and calculation for each scenario, making it difficult to meet the timeliness requirements for intra-day interactions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mathematical Expression |
|---|
| Algorithm | Parameter |
|---|---|
| AFT | Initial value of perceived potential: 0.15 Initial value of tracking distance: 1.5 |
| MFO | Control search intensity: −1 Step size influence factor: 1 |
| AOA | Convergence parameters:7, adjustment amplitude: 0.2 maximum/small target probability: 0.8/0.3 |
| SCA | Control convergence rate: 2 |
| PSO |
| Function Index | Type | Dimensionality | Value Range | Optimal Value |
|---|---|---|---|---|
| unimodal function | 4 | 0.0003 | ||
| unimodal function | 2 | 3 | ||
| unimodal function | 2 | 1 | ||
| multimodal function | 30 | 0 | ||
| multimodal function | 30 | 0 | ||
| multimodal function | 30 | 0 |
References
- Kaiss, M.; Wan, Y.; Gebbran, D. Review on Virtual Power Plants/Virtual Aggregators: Concepts, applications, prospects and operation strategies. Renew. Sustain. Energy Rev. 2025, 211, 115242. [Google Scholar] [CrossRef]
- Jin, W.; Wang, P.; Yuan, J. Key Role and Optimization Dispatch Research of Technical Virtual Power Plants in the New Energy Era. Energies 2024, 17, 5796. [Google Scholar] [CrossRef]
- Gao, H.; Jin, T.; Feng, C.; Li, C.; Chen, Q.; Kang, C. Review of virtual power plant operations: Resource coordination and multidimensional interaction. Appl. Energy 2024, 357, 122284. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, Y.; Dai, Y. Combined optimization scheduling of virtual power plant including tram. Autom. Instrum. 2024, 11, 125–129. [Google Scholar]
- Xu, Y.; Xu, Y.; Yang, J. Low-carbon economic dispatch of electricity-to-gas virtual power plant based on ladder carbon trading. J. Power Syst. Autom. 2023, 35, 118–128. [Google Scholar]
- Song, J.; Yang, Y.; Xu, Q.; Liu, Z.; Zhang, X. Robust bidding game approach for multiple virtual power plants participating in day-ahead electricity market. Electr. Power Autom. Equip. 2019, 43, 77–85. [Google Scholar]
- Su, H.; Wang, X.; Ding, Z. Bi-Level Optimization Model for DERs Dispatch Based on an Improved Harmony Searching Algorithm in a Smart Grid. Electronics 2023, 12, 4515. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, J.; Tao, W.; Ai, Q. Optimization Scheduling of Combined Heat–Power–Hydrogen Supply Virtual Power Plant Based on Stepped Carbon Trading Mechanism. Electronics 2024, 13, 4798. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, H.; Lam, J.; Kwok, K.W. Differentially private consensus and distributed optimization in multi-agent systems: A review. Neurocomputing 2024, 597, 127986. [Google Scholar] [CrossRef]
- Zhu, J.; Dong, H.; Li, S.; Zhong, Z.; Chen, Z.; Wu, W. Review of Optimal Dispatching for the Aggregation of Micro-energy Grids Based on Distributed New Energy. Proc. CSEE 2024, 44, 7952–7970. [Google Scholar]
- Yang, J.; Hou, J.; Liu, Y.; Zhang, H. Distributed Cooperative Control Method and Application in Power System. Acta Electrotech. 2021, 36, 4035–4049. [Google Scholar]
- Chen, H.; Wang, Z.; Zhang, R.; Jiang, T.; Li, X.; Li, G. Decentralized optimal dispatching modeling for wind power integrated power system with virtual power plant. Proc. CSEE 2019, 39, 2615–2625. [Google Scholar]
- Kou, L.; Wu, M.; Li, Y.; Qu, X.; Xie, H. Optimization and control method of distributed active and reactive power in active distribution network. Proc. CSEE 2020, 40, 1856–1865. [Google Scholar]
- Siqin, Z.; Qiao, T.; Diao, R.; Wang, X.; Xu, G. Research on the Collaborative Operation of Diversified Energy Storage and Park Clusters: A Method Combining Data Generation and a Distributionally Robust Chance-Constrained Operational Model. Electronics 2024, 13, 4997. [Google Scholar] [CrossRef]
- Lu, W.; Liu, M.; Lin, S.; Li, L. Incremental-oriented ADMM for distributed optimal power flow with discrete variables in distribution networks. IEEE Trans. Smart Grid 2019, 10, 6320–6331. [Google Scholar] [CrossRef]
- Zang, Y.; Xia, S.; Li, J. A robust game optimization scheduling method for shared energy storage micro electric network group distribution. Power Syst. Prot. Control 2023, 51, 90–101. [Google Scholar]
- Guo, Z.; Li, G.; Zhou, M. Fast and dynamic robust optimization of integrated electricity-gas system operation with carbon trading. Power Syst. Technol. 2020, 44, 1220–1228. [Google Scholar]
- Fan, S.; He, G.; Zheng, X. Research on online distributed optimization-based self-approaching optimization operation method of Virtual Power Plant. Proc. CSEE 2023, 43, 4935–4950. [Google Scholar]
- Xu, Z.; He, J.; Liu, Z.; Chen, W.; Wang, X.; Zhang, P. Solution method of virtual power plant dynamic feasible region based on decoupling of coupling constraints. Proc. CSEE 2024, 44, 3440–3452. [Google Scholar]
- Sheng, W.; Li, P.; Duan, Q.; Li, Z.; Zhu, C. Research on Energy Management Strategy of Energy Hub with Energy Router Based on Lyapunov Optimization Method. Proc. CSEE 2019, 39, 6212–6225. [Google Scholar]
- Hao, R.; Fan, Y.; Hou, J.; Bai, X.; Liu, Y. Construction method of virtual power plant interaction model based on WKNN and KELM-GPR. Acta Energiae Solaris Sin. 2024, 45, 637–649. [Google Scholar]
- Chen, X.; Pei, W.; Deng, W.; Zhao, J.; Wang, X.; Pu, T. Data-driven Virtual Power Plant Dispatching Characteristic Packing Method. Proc. CSEE 2021, 41, 4816–4828. [Google Scholar]
- Lu, X.; Qiu, J.; Zhang, C.; Lei, G.; Zhu, J. Assembly and Competition for Virtual Power Plants with Multiple ESPs Through a “Recruitment–Participation” Approach. IEEE Trans. Power Syst. 2024, 39, 4382–4396. [Google Scholar] [CrossRef]
- Lu, X.; Qiu, J.; Zhang, C.; Lei, G.; Zhu, J. Seizing unconventional arbitrage opportunities in virtual power plants: A profitable and flexible recruitment approach. Appl. Energy 2024, 358, 122628. [Google Scholar] [CrossRef]
- Riaz, C.; Mancarella, P. On feasibility and flexibility operating regions of virtual power plants and TSO/DSO interfaces. In Proceedings of the 2019 IEEE Milan Power Tech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Liu, Y.; Wu, L.; Chen, Y.; Li, J. Integrating high DER-penetrated distribution systems into ISO energy market clearing: A feasible region projection approach. IEEE Trans. Power Syst. 2021, 36, 2262–2272. [Google Scholar] [CrossRef]
- Kalantar-Neyestanaki, M.; Sossan, F.; Bozorg, M.; Cherkaoui, R. Characterizing the reserve provision capability area of active distribution networks: A linear robust optimization method. IEEE Trans. Smart Grid 2020, 11, 2464–2475. [Google Scholar] [CrossRef]
- Wang, S.; Wu, W. Stochastic flexibility evaluation for virtual power plant by aggregating distributed energy resources. arXiv 2020, arXiv:2006.16170. [Google Scholar]
- Wang, S.; Wu, W. Aggregate Flexibility of Virtual Power Plants with Temporal Coupling Constraints. IEEE Trans. Smart Grid 2021, 12, 5043–5051. [Google Scholar] [CrossRef]
- Zhou, Y.; Essayeh, C.; Morstyn, T. Aggregated Feasible Active Power Region for Distributed Energy Resources with a Distributionally Robust Joint Probabilistic Guarantee. IEEE Trans. Power Syst. 2024, 40, 556–571. [Google Scholar] [CrossRef]
- Jiang, H.; Yang, Z.; Lin, W.; Yu, J. Probability distribution of dispatch region for a virtual power plant considering distributed renewable uncertainties. Proc. CSEE 2022, 42, 5565–5576. [Google Scholar]
- GB/T 40607-2021; Technical Requirements for Dispatching Side Forecasting System of Wind or Photovoltaic Power. National Electric Power Regulatory Standardization Technical Committee: Beijing, China, 2022.
- Neely, M.J. Stochastic Network Optimization with Application to Communication and Queueing Systems; Morgan & Claypool: San Rafael, CA, USA, 2010; pp. 1–160. [Google Scholar]
- Liu, T.; Li, Y.; Qin, X. Hybrid strategy improved Harris Hawks optimization algorithm for global optimization and microgrid economic scheduling problem. Clust. Comput. 2025, 28, 177. [Google Scholar] [CrossRef]
- Lingkon RL, M.; Ahmmed, S.M. Application of an improved ant colony optimization algorithm of hybrid strategies using scheduling for patient management in hospitals. Heliyon 2024, 10, e40134. [Google Scholar] [CrossRef]
- Zhao, C.; Wu, L.; Zuo, C.; Zhang, H. An improved fruit fly optimization algorithm with Q-learning for solving distributed permutation flow shop scheduling problems. Complex Intell. Syst. 2024, 10, 5965–5988. [Google Scholar] [CrossRef]
- Zhao, F.; Fan, Y. Bi level optimal dispatching of multi energy virtual power plant influenced by TOU price. Power Syst. Prot. Control 2019, 47, 33–40. [Google Scholar]













| Parameters | Description |
|---|---|
| Daily operating cost of VPP | |
| Total number of time periods in the scheduling cycle | |
| Total operating cost during time period t | |
| Wind power operating cost during time period t | |
| Photovoltaic operating cost during time period t | |
| Energy storage operating cost during time period t | |
| Gas turbine operating cost during time period t | |
| Demand response cost during time period t | |
| Unserved load penalty cost during time period t | |
| Surplus electricity selling revenue during time period t | |
| Wind power operating cost coefficient | |
| Photovoltaic operating cost coefficient | |
| Energy storage battery operating cost coefficient | |
| Demand response compensation cost coefficient | |
| Unserved load penalty coefficient | |
| Surplus electricity selling price | |
| Gas turbine operating cost coefficient | |
| Wind power output during time period t | |
| Photovoltaic output during time period t | |
| Energy storage output during time period t | |
| Gas turbine output during time period t | |
| Dispatchable load output during time period t | |
| Unserved load power during time period t | |
| Surplus electricity injected into the grid during time period t | |
| Duration of a time period | |
| New dispatch instructions issued by the distribution network | |
| 0–1 variable | |
| Charge and discharge power of energy storage during time period t | |
| Maximum charging and discharging power of energy storage | |
| Charging and discharging efficiency of the energy storage battery | |
| Rated capacity of energy storage | |
| State of charge of energy storage at the end of time period t | |
| Minimum and maximum allowable state of charge for energy storage | |
| State of charge of energy storage at the beginning and end of the day | |
| Maximum reducible load at time t | |
| Maximum and minimum power of gas turbine | |
| Ramp-up and ramp-down limits of gas turbine power | |
| Forecast error coefficient of photovoltaic/wind power | |
| Maximum selling power | |
| Non-negative weight coefficient | |
| Virtual queue | |
| Power of the -th unit during the t-th time period | |
| Function vector composed of constraint conditions | |
| Vector composed of dual multipliers corresponding to the constraints during time period t | |
| Penalty coefficient | |
| Squared L2 norm of the vector | |
| Relaxation variable vector | |
| Maximum and minimum inertia coefficients | |
| The average and minimum fitness of all particles during the -th iteration | |
| The fitness value of the i-th particle in the -th iteration and the flag indicating local optimality | |
| Threshold for determining local optimality |
| Parameter | Value |
|---|---|
| 0.13 | |
| 0.1 | |
| ADMM penalty coefficient | 1.2 |
| Non-negative weight coefficient | 20 |
| 0.9/0.4 | |
| Local convergence judgment threshold | 0.6 |
| Unit Type | Cost | Value |
|---|---|---|
| Wind turbine | CNY/(MWh) | 30.6 |
| Photovoltaic unit | CNY/(MWh) | 9.8 |
| Energy storage | /(MWh) | 8 |
| /(MW) | 2.5 | |
| 0.9/0.1/0.625 | ||
| 0.9/0.9 | ||
| CNY/(MWh) | 430 | |
| Gas turbine | 8/2 | |
| 400/120 | ||
| Reducible load | CNY/MWh) | 780 |
| surplus electricity export | CNY/(MWh) | 200 |
| Scenario | Objective Function | Number of Constraints | Number of Variables |
|---|---|---|---|
| 1 | 150 | 32 | |
| 2 | 15 | 4 |
| Method | Model Update and Training | Model Solving | Total Time/s |
|---|---|---|---|
| Method A | 0 | 121.7 | 121.7 |
| Method B | 98 | 15 | 113 |
| Method | Upper Scheduling Boundary | Execution Probability |
|---|---|---|
| Proposed method | 3 MW | 100% |
| Scenario generation method | 3.5 MW | 71% |
| 3.2 MW | 92% | |
| 3 MW | 95.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Fan, Y.; Hou, J. Research on Distributed Optimization Scheduling and Its Boundaries in Virtual Power Plants. Electronics 2025, 14, 932. https://doi.org/10.3390/electronics14050932
Yu J, Fan Y, Hou J. Research on Distributed Optimization Scheduling and Its Boundaries in Virtual Power Plants. Electronics. 2025; 14(5):932. https://doi.org/10.3390/electronics14050932
Chicago/Turabian StyleYu, Jiaquan, Yanfang Fan, and Junjie Hou. 2025. "Research on Distributed Optimization Scheduling and Its Boundaries in Virtual Power Plants" Electronics 14, no. 5: 932. https://doi.org/10.3390/electronics14050932
APA StyleYu, J., Fan, Y., & Hou, J. (2025). Research on Distributed Optimization Scheduling and Its Boundaries in Virtual Power Plants. Electronics, 14(5), 932. https://doi.org/10.3390/electronics14050932