
FPGA Implementation of Image Encryption by Adopting New Shimizu–Morioka System-Based Chaos Synchronization


Abstract
1. Introduction
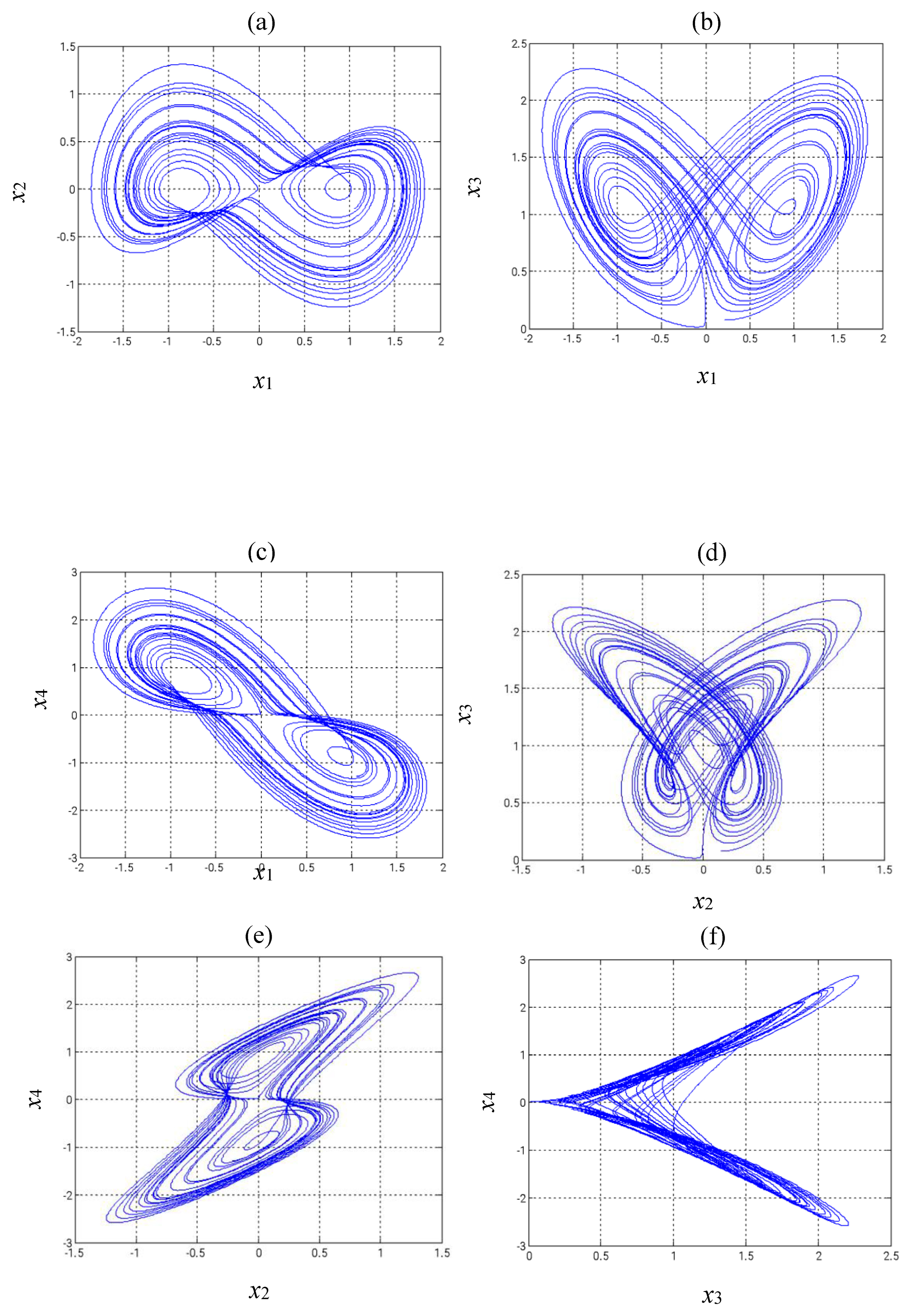
2. Nonlinear Dynamics Analysis of the New Shimizu–Morioka System
3. Achieving Chaotic Synchronization of the Updated Shimizu–Morioka System Through Adaptive Backstepping Control and GYC Partial Region Stability Theory
3.1. Chaos Synchronization Method
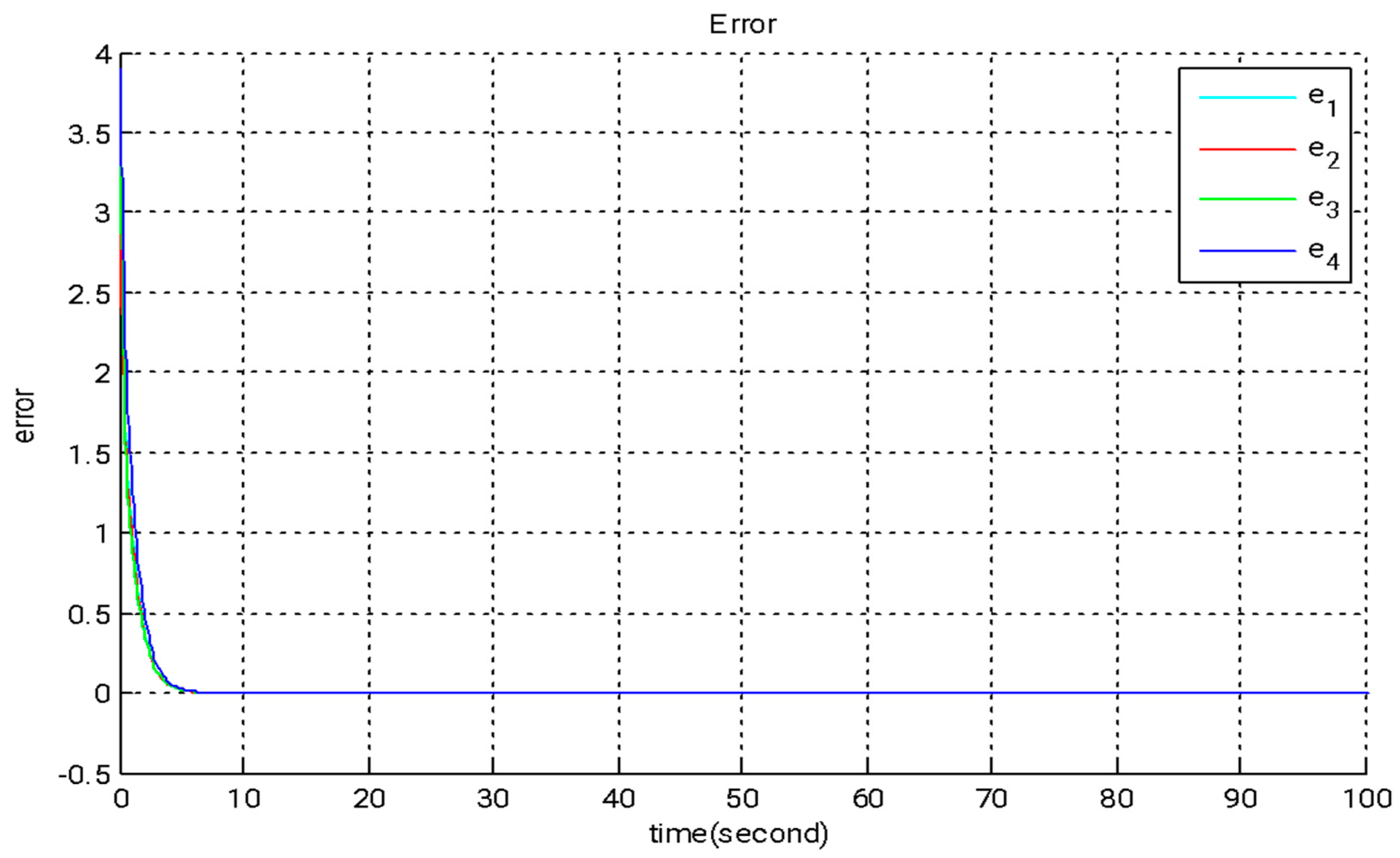
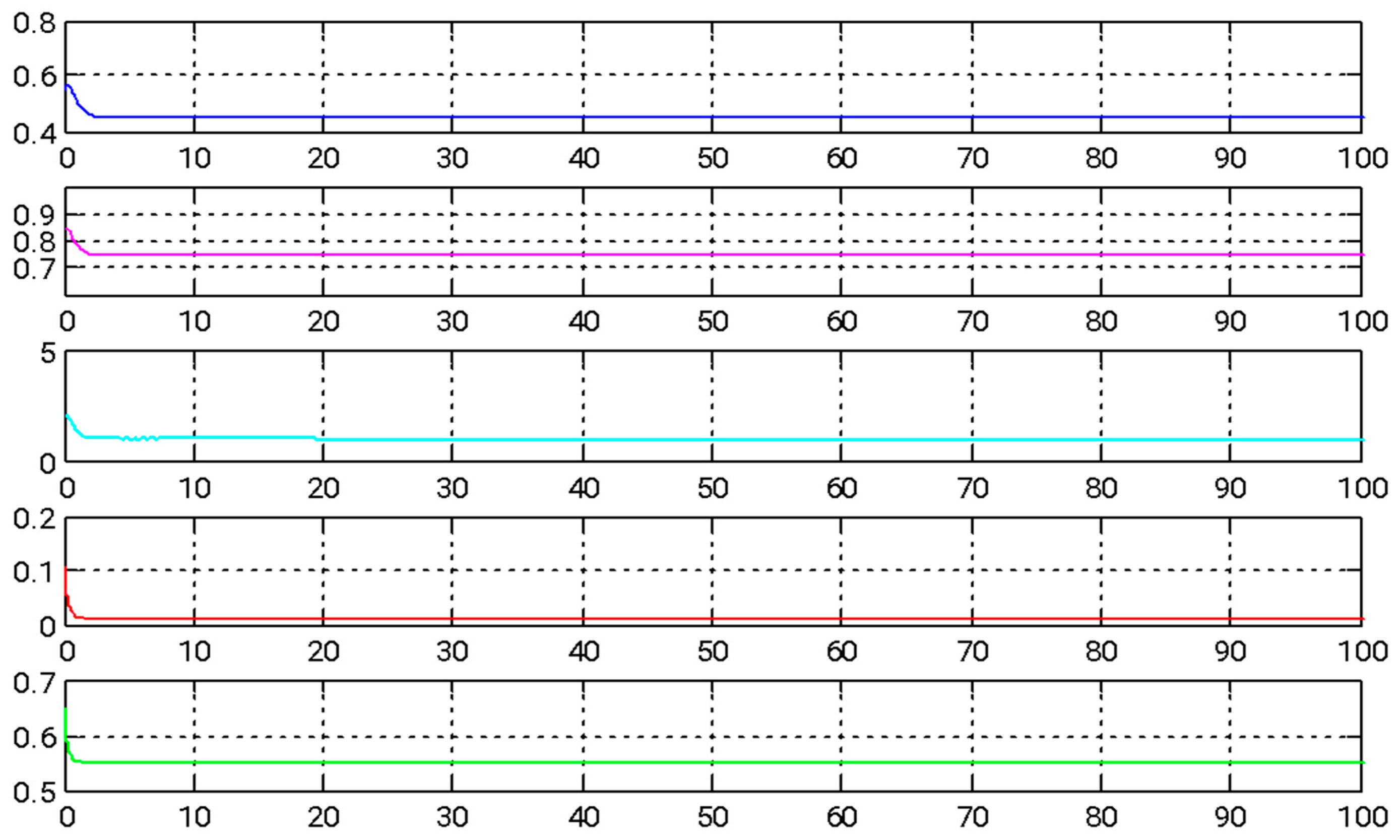
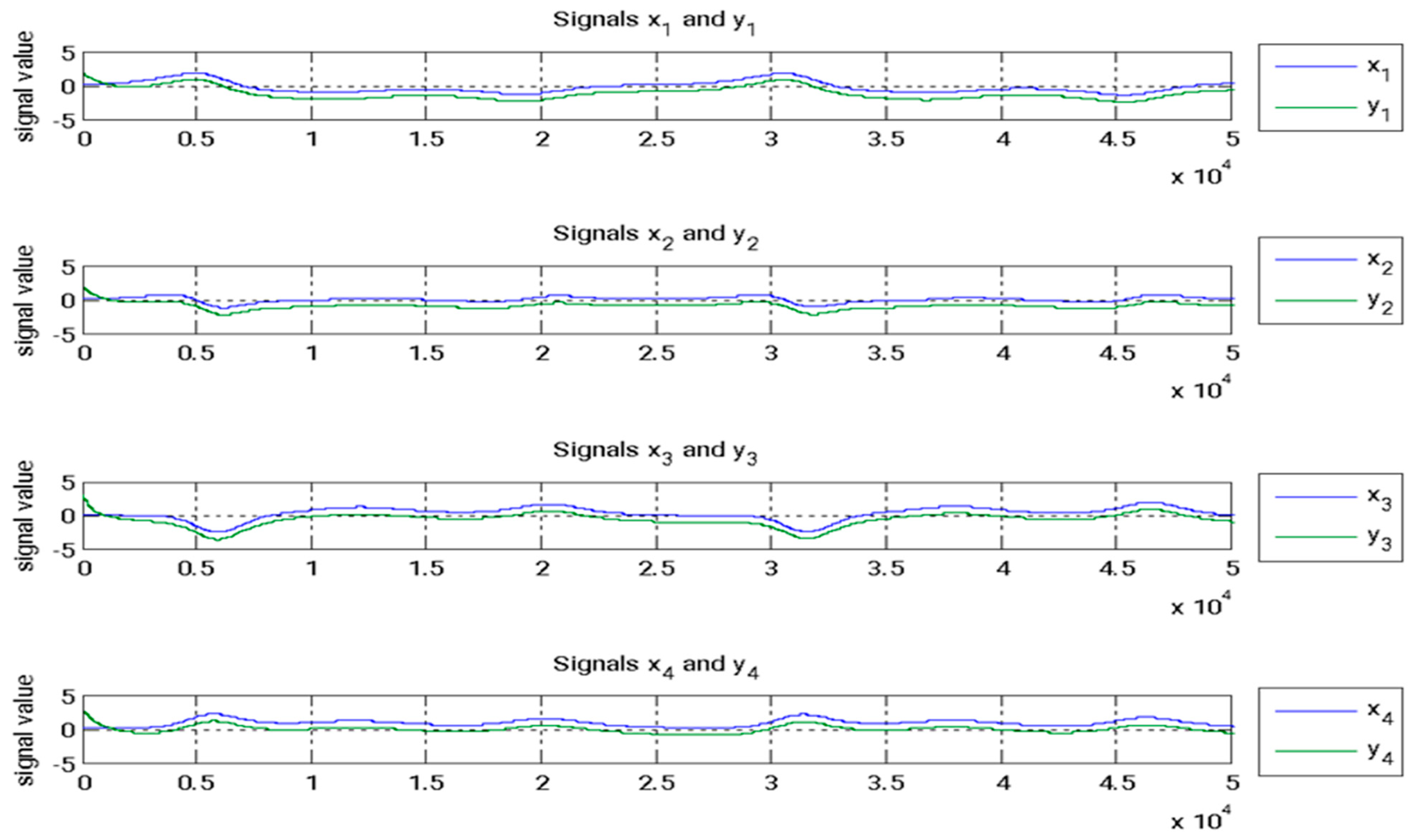
3.2. Design and Numerical Analysis of Synchronization Using Adaptive Backstepping Control with the GYC Partial Region Stability Framework
4. The Process of Discretizing the Chaos Synchronization Mechanism for the Updated Shimizu–Morioka System
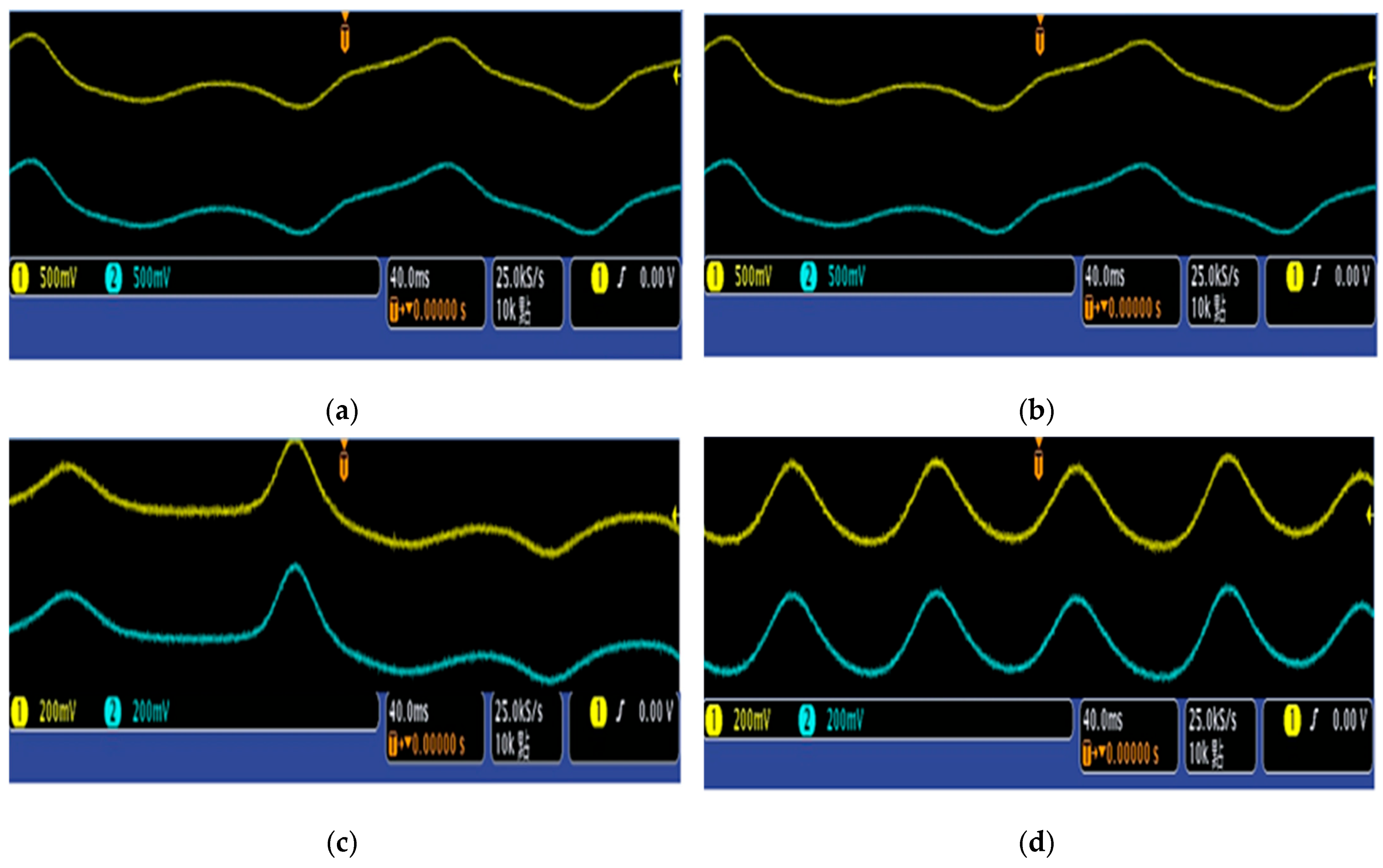
5. FPGA-Based Implementation of the Updated Shimizu–Morioka System for Image Encryption
5.1. Research and Method
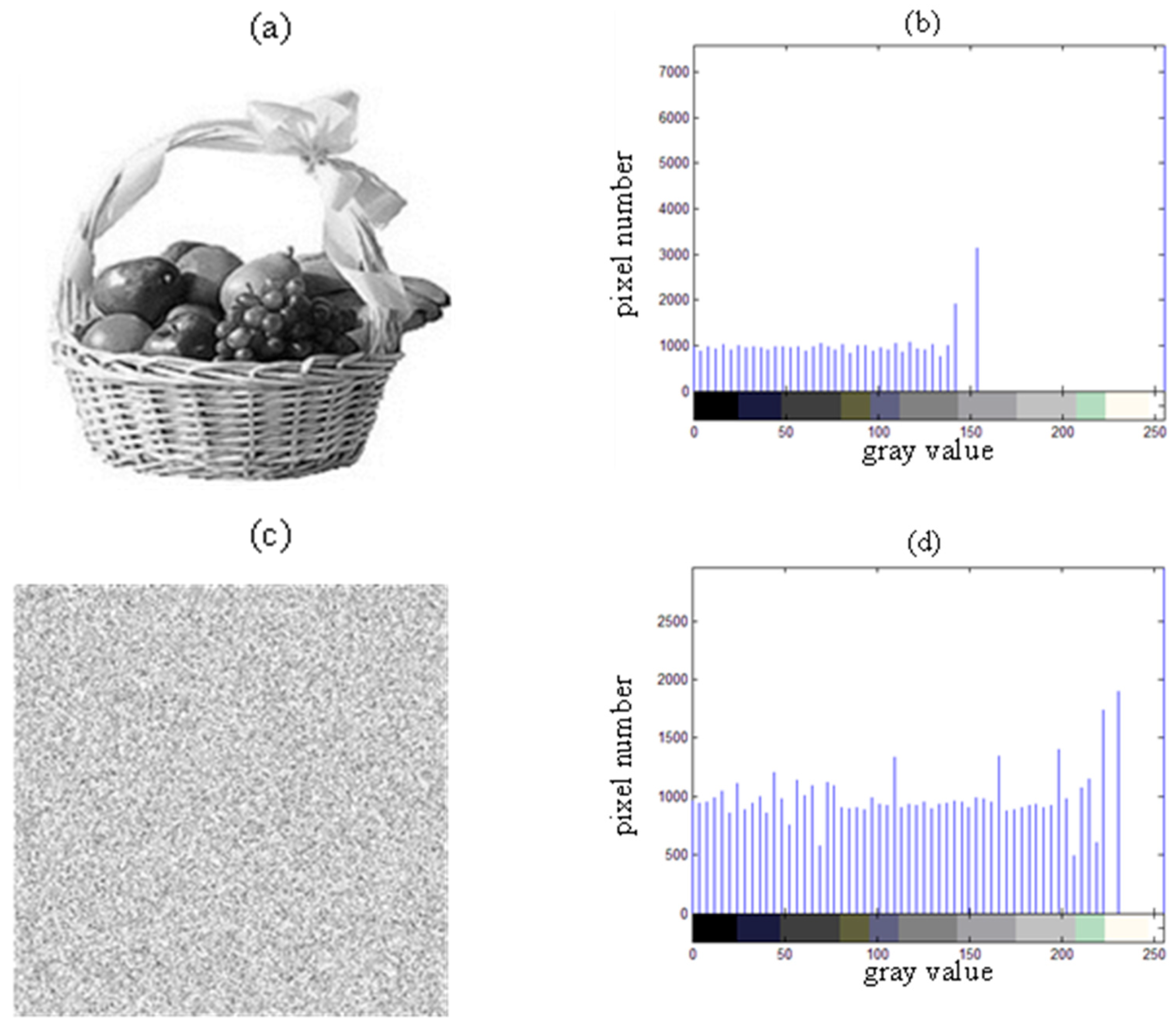
5.2. Image Encryption
5.3. Image Decryption
5.4. Histogram Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CISCO. Available online: https://www.cisco.com/#tabs-35d568e0ff-item-194f491212-tab (accessed on 29 January 2025).
- Brown, R.; Chua, L.O. Clarifying chaos: Examples and counterexamples. Int. J. Bifurc. Chaos 1996, 6, 219–249. [Google Scholar] [CrossRef]
- Dachselt, F.; Schwarz, W. Chaos and cryptography. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 1498–1509. [Google Scholar] [CrossRef]
- Jakimoski, G.; Kocarev, L. Chaos and cryptography: Block encryption ciphers based on chaotic maps. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 163–169. [Google Scholar] [CrossRef]
- Schmitz, R. Use of chaotic dynamical systems in cryptography. J. Frankl. Inst. 2001, 338, 429–441. [Google Scholar] [CrossRef]
- Kocarev, L.; Jakimoski, G.; Stojanovski, T.; Parlitz, U. From chaotic maps to encryption schemes. In Proceedings of the 1998 IEEE International Symposium on Circuits and Systems (ISCAS), Monterey, CA, USA, 31 May–3 June 1998; pp. 514–517. [Google Scholar]
- Alvarez, G.; Li, S. Some basic cryptographic requirements for chaos-based cryptosystems. Int. J. Bifurc. Chaos 2006, 16, 2129–2151. [Google Scholar] [CrossRef]
- Sankpal, P.R.; Vijaya, P. Image encryption using chaotic maps: A survey. In Proceedings of the 2014 Fifth International Conference on Signal and Image Processing, Bangalore, India, 8–10 January 2014; pp. 102–107. [Google Scholar]
- Ephin, M.; Joy, J.A.; Vasanthi, N. Survey of Chaos based Image encryption and decryption techniques. In Proceedings of the Amrita International Conference of Women in Computing (AICWIC’13), Coimbatore, India, 9–11 January 2013; International Journal of Computer Applications (IJCA): Wilmington, NC, USA, 2013. [Google Scholar]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Hsu, W.-T.; Tsai, J.S.-H.; Guo, F.-C.; Guo, S.-M.; Shieh, L.-S. From fault-diagnosis and performance recovery of a controlled system to chaotic secure communication. Int. J. Bifurc. Chaos 2014, 24, 1450151. [Google Scholar] [CrossRef]
- Mittal, A.; Dwivedi, A.; Dwivedi, S. Parameter adaptation technique for rapid synchronization and secure communication. Eur. Phys. J. Spec. Top. 2014, 223, 1549–1560. [Google Scholar] [CrossRef]
- Hu, H.; Deng, Y.; Liu, L. Counteracting the dynamical degradation of digital chaos via hybrid control. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1970–1984. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, F. Complex function projective synchronization of complex chaotic system and its applications in secure communication. Nonlinear Dyn. 2014, 76, 1087–1097. [Google Scholar] [CrossRef]
- Padmanaban, E.; Boccaletti, S.; Dana, S. Emergent hybrid synchronization in coupled chaotic systems. Phys. Rev. E 2015, 91, 022920. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Mahmoud, E.E.; Arafa, A.A. Passive control of n-dimensional chaotic complex nonlinear systems. J. Vib. Control 2013, 19, 1061–1071. [Google Scholar] [CrossRef]
- Hung, M.-L.; Yau, H.-T. Circuit implementation and synchronization control of chaotic horizontal platform systems by wireless sensors. Math. Probl. Eng. 2013, 2013, 903584. [Google Scholar] [CrossRef]
- Eskov, V.; Gavrilenko, T.; Vokhmina, Y.V.; Zimin, M.; Filatov, M. Measurement of chaotic dynamics for two types of tapping as voluntary movements. Meas. Tech. 2014, 57, 720–724. [Google Scholar] [CrossRef]
- Ge, Z.-M.; Yu, J.-K.; Chen, H.-K. Three asymptotical stability theorems on partial region with applications. Jpn. J. Appl. Phys. 1998, 37, 2762. [Google Scholar] [CrossRef]
- El-Dessoky, M.; Yassen, M.; Aly, E. Bifurcation analysis and chaos control in Shimizu–Morioka chaotic system with delayed feedback. Appl. Math. Comput. 2014, 243, 283–297. [Google Scholar] [CrossRef]
- Tlelo-Cuautle, E.; Carbajal-Gomez, V.; Obeso-Rodelo, P.; Rangel-Magdaleno, J.; Nunez-Perez, J.C. FPGA realization of a chaotic communication system applied to image processing. Nonlinear Dyn. 2015, 82, 1879–1892. [Google Scholar] [CrossRef]
- Masmoudi, A.; Puech, W. Lossless chaos-based crypto-compression scheme for image protection. IET Image Process. 2014, 8, 671–686. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chaotic Systems | Cryptography Algorithms |
|---|---|
| Phase space: set of real numbers | Phase space: finite set of integer numbers |
| Iterations | Rounds |
| Parameters | Keys |
| Sensitivity to initial conditions and control parameters | Diffusion |
| Ergodicity | Confusion |
| Sensitivity to initial conditions/ control parameter | Diffusion with a small change in the plaintext/secret key |
| Deterministic dynamics | Deterministic pseudo-randomness |
| Mixing property | Diffusion with a small change in one plain-block of the whole plaintext |
| Structure complexity | Algorithm (attack) complexity |
| Method of Control | Error States | e1 | e2 | e3 | e4 |
|---|---|---|---|---|---|
| Adaptive backstepping control | t = 18.00 s | t = 16.20 s | t = 16.74 s | t = 17.28 s | |
| t = 19.44 s | t = 20.16 s | t = 33.48 s | t = 55.26 s | ||
| Adaptive backstepping control with GYC partial region stability theory | t = 3.533 s | t = 3.366 s | t = 3.366 s | t = 3.700 s | |
| t = 5.684 s | t = 5.684 s | t = 5.684 s | t = 5.988 s |
| Method of Control | Error States | e1 | e2 | e3 | e4 |
|---|---|---|---|---|---|
| Adaptive backstepping control | t = 2.652 s | t = 3.677 s | t = 7.576 s | t = 9.773 s | |
| t = 5.911 s | t = 6.988 s | t = 15.378 s | t = 13.644 s | ||
| Adaptive backstepping control with GYC partial region stability theory | t = 3.361 s | t = 3.334 s | t = 3.366 s | t = 3.526 s | |
| t = 5.655 s | t = 5.690 s | t = 5.724 s | t = 5.033 s |
| Error States | e1 | e2 | e3 | e4 | |
|---|---|---|---|---|---|
| Controllers | |||||
| Adaptive backstepping | t = 1.858 ms | t = 1.509 ms | t = 1.491 ms | t = 1.480 ms | |
| Adaptive backstepping control with GYC partial region stability theory | t = 1.070 ms | t = 1.467 ms | t = 1.049 ms | t = 1.101 ms | |
| Plain text: | 11101110 | 00000111 | |
| Encryption key: | 10101111 | 10101111 | |
| Cipher text message: | 01000001 | 10101000 |  The first XOR encryption The first XOR encryption |
| Decryption key: | 10101111 | 10101111 | |
| Decrypt the message: | 11101110 | 00000111 | The second XOR decryption |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.-H.; Lee, J.-D.; Tam, L.-M.; Li, S.-Y.; Cheng, S.-C. FPGA Implementation of Image Encryption by Adopting New Shimizu–Morioka System-Based Chaos Synchronization. Electronics 2025, 14, 740. https://doi.org/10.3390/electronics14040740
Yang C-H, Lee J-D, Tam L-M, Li S-Y, Cheng S-C. FPGA Implementation of Image Encryption by Adopting New Shimizu–Morioka System-Based Chaos Synchronization. Electronics. 2025; 14(4):740. https://doi.org/10.3390/electronics14040740
Chicago/Turabian StyleYang, Cheng-Hsiung, Jian-De Lee, Lap-Mou Tam, Shih-Yu Li, and Shyi-Chyi Cheng. 2025. "FPGA Implementation of Image Encryption by Adopting New Shimizu–Morioka System-Based Chaos Synchronization" Electronics 14, no. 4: 740. https://doi.org/10.3390/electronics14040740
APA StyleYang, C.-H., Lee, J.-D., Tam, L.-M., Li, S.-Y., & Cheng, S.-C. (2025). FPGA Implementation of Image Encryption by Adopting New Shimizu–Morioka System-Based Chaos Synchronization. Electronics, 14(4), 740. https://doi.org/10.3390/electronics14040740