
Research on INS/GNSS Integrated Navigation Algorithm for Autonomous Vehicles Based on Pseudo-Range Single Point Positioning




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Works
- (1)
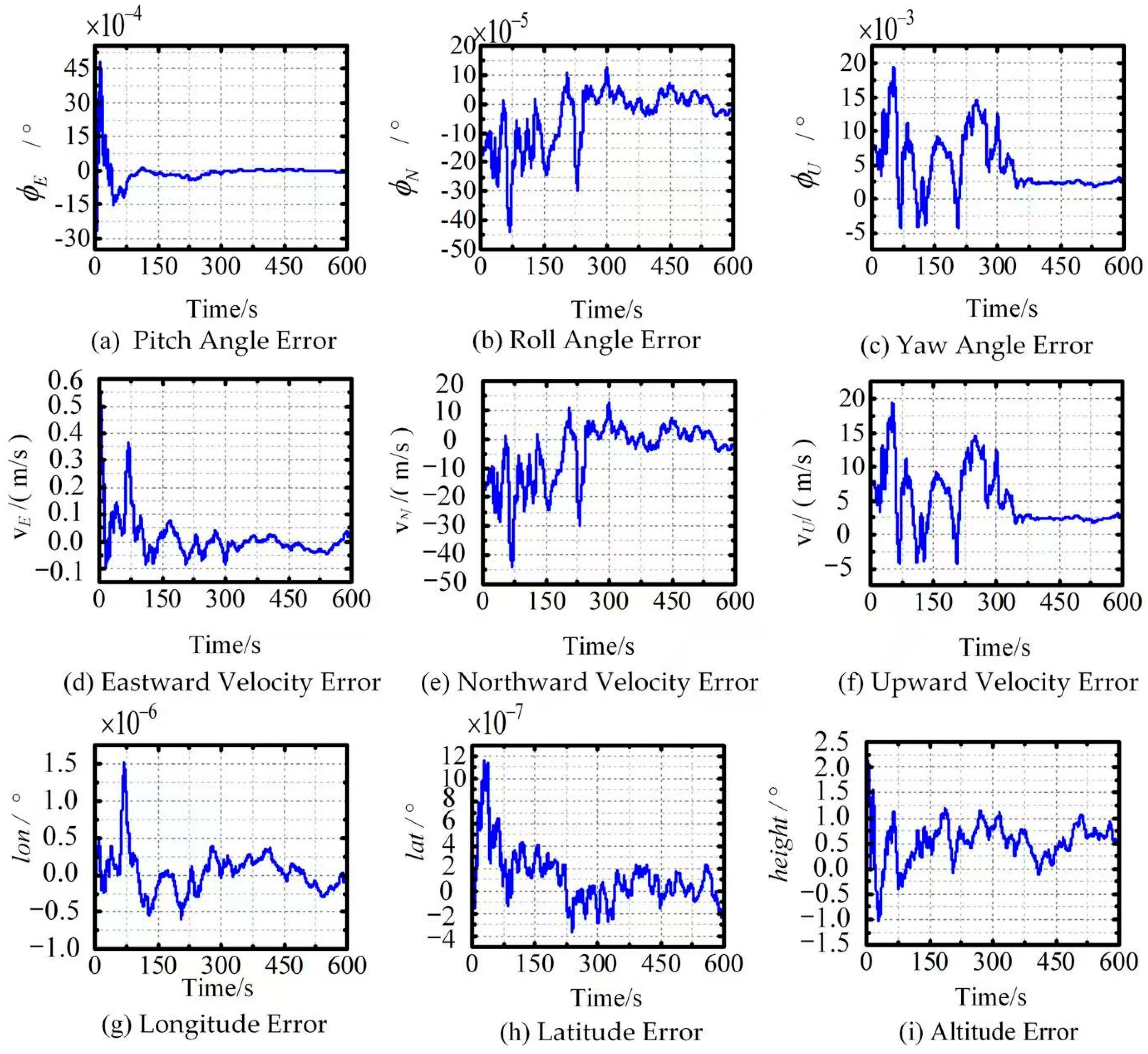
- The proposed integrated GNSS/INS navigation framework achieves reliable positioning performance at low cost by fusing real-time differential GNSS corrections with an adaptive EKF, enhancing the stability of vehicle localization through three key mechanisms. Leveraging low-cost off-the-shelf components (e.g., ATK1218-BD GNSS module and MPU6050 IMU), it effectively reduces IMU error accumulation and improves GNSS positioning accuracy via adaptive error compensation. Specifically, the EKF addresses misalignment angle errors by rapidly dampening fluctuations in pitch, roll, and heading angles. The integration of differential GNSS plays a key role in mitigating GNSS positioning errors caused by common environmental interferences in typical scenarios, thereby reducing error accumulation, while the EKF optimizes velocity error management, with oscillations in eastward and northward directions controlled and converging quickly.
- (2)
- The experimental outcomes indicate that the integrated navigation system maintains a navigation accuracy within a 2-m range, exhibiting robust tracking performance. Outdoor tests showed a significant enhancement in positioning accuracy, with velocity errors controlled within ±0.15 m/s and heading angle errors within ±0.14°. The improvement in positioning accuracy was approximately 4.2 m. These results confirm the effectiveness of the position differential technique in enhancing positioning accuracy under practical operating conditions.
3. Positioning System Model
3.1. Differential GNSS Positioning System
3.2. Inertial Navigation System Algorithms and Mechanical Arrangement
3.3. Inertial Navigation Output Error Modeling and Initial Alignment
4. GNSS/INS Integrated Navigation
4.1. Error Modeling
4.2. State Space Model and EKF Filter
5. Simulation and Experiment Results
5.1. Simulation Results
5.1.1. Differential Positioning System Simulation
5.1.2. Simulation of Initial Alignment for Inertial Navigation
5.1.3. Inertial Navigation Simulation
5.1.4. Integrated Navigation Trajectory
5.2. Instrumentation and Experimental Platform Setup
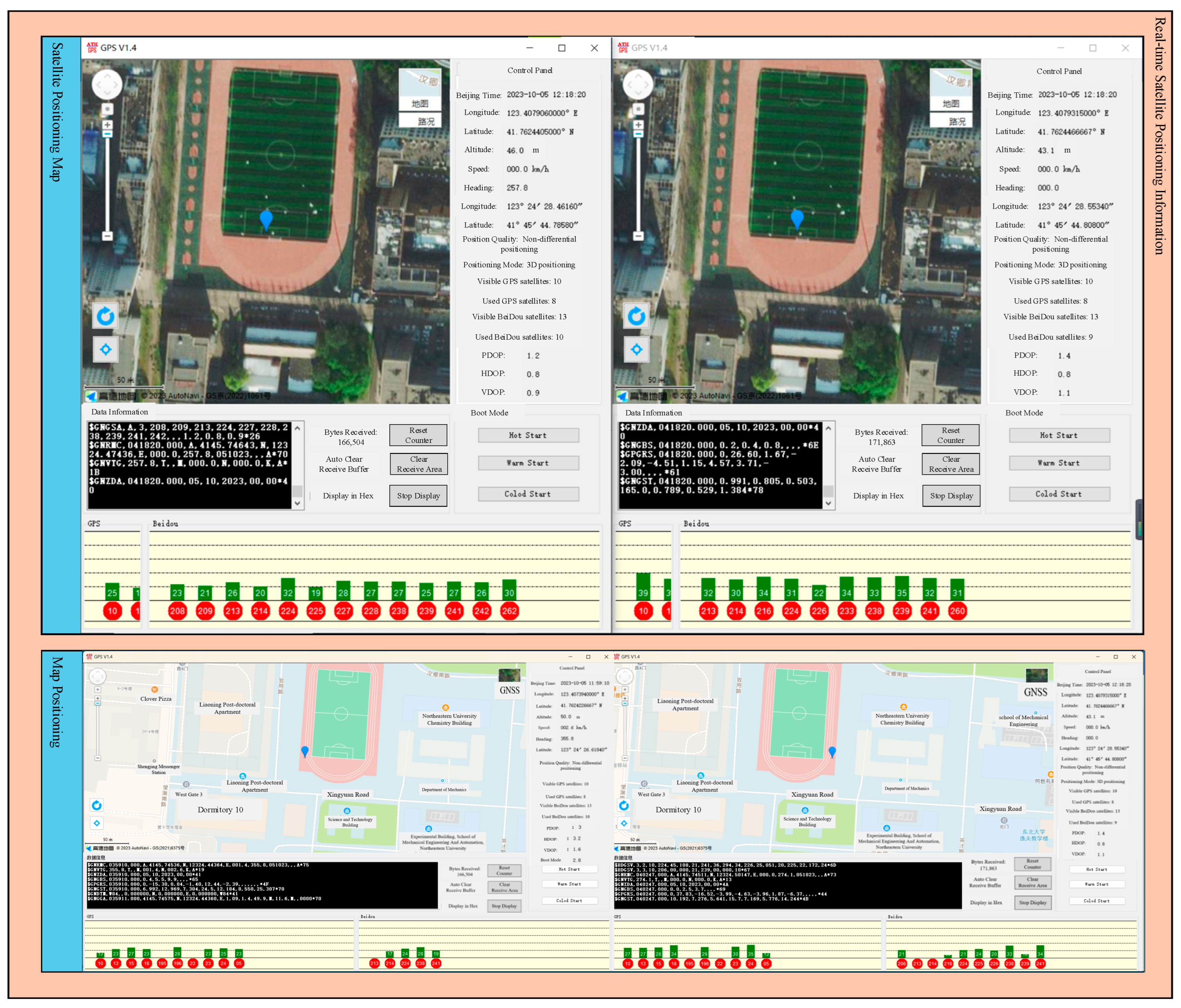
5.2.1. GNSS Positioning Module
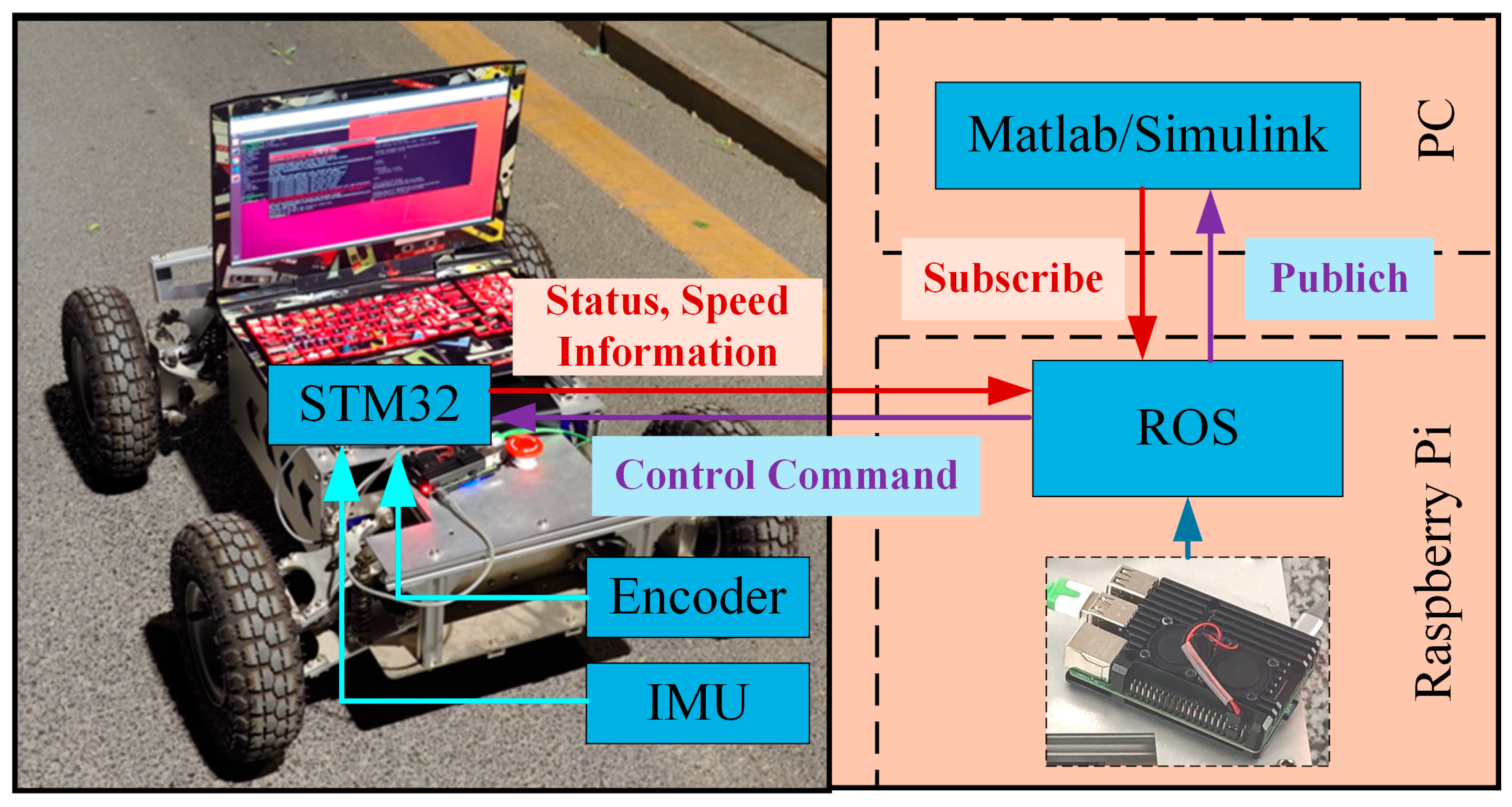
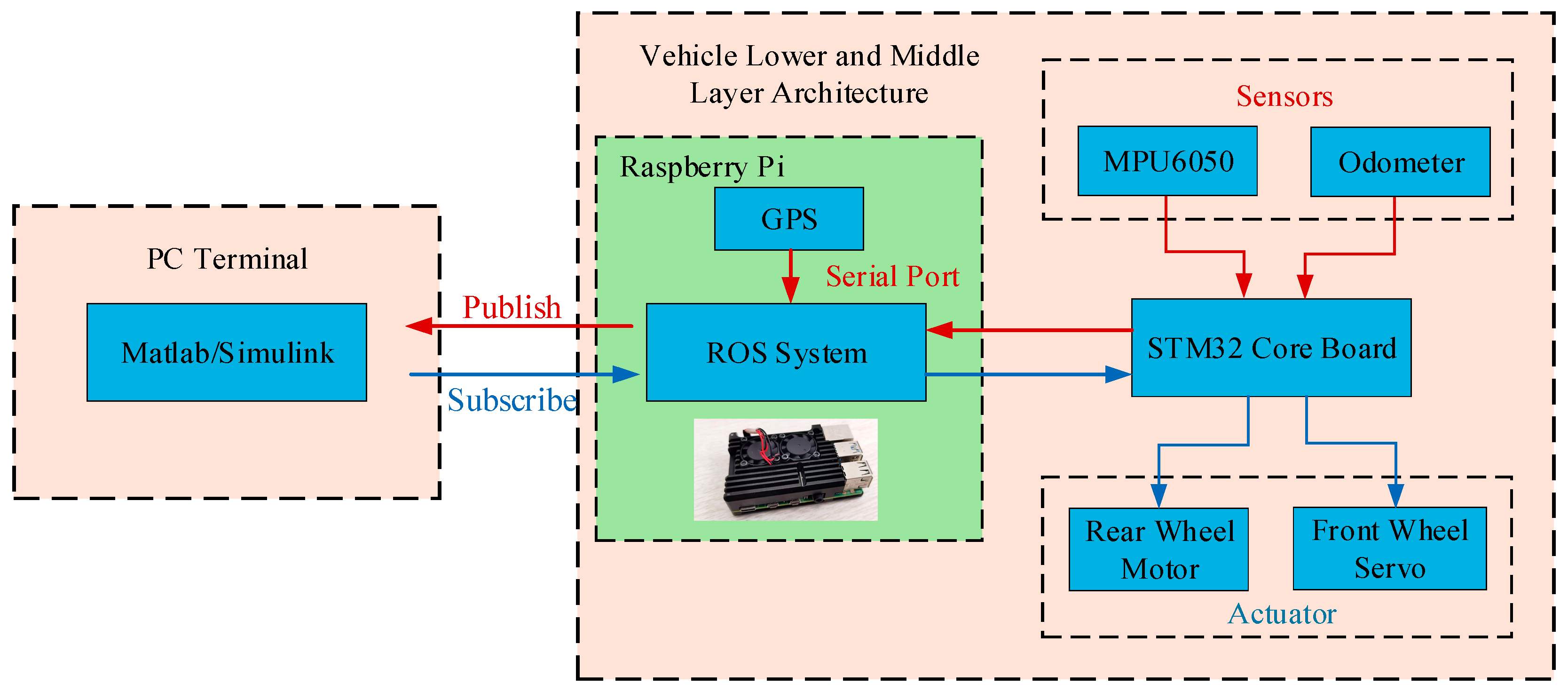
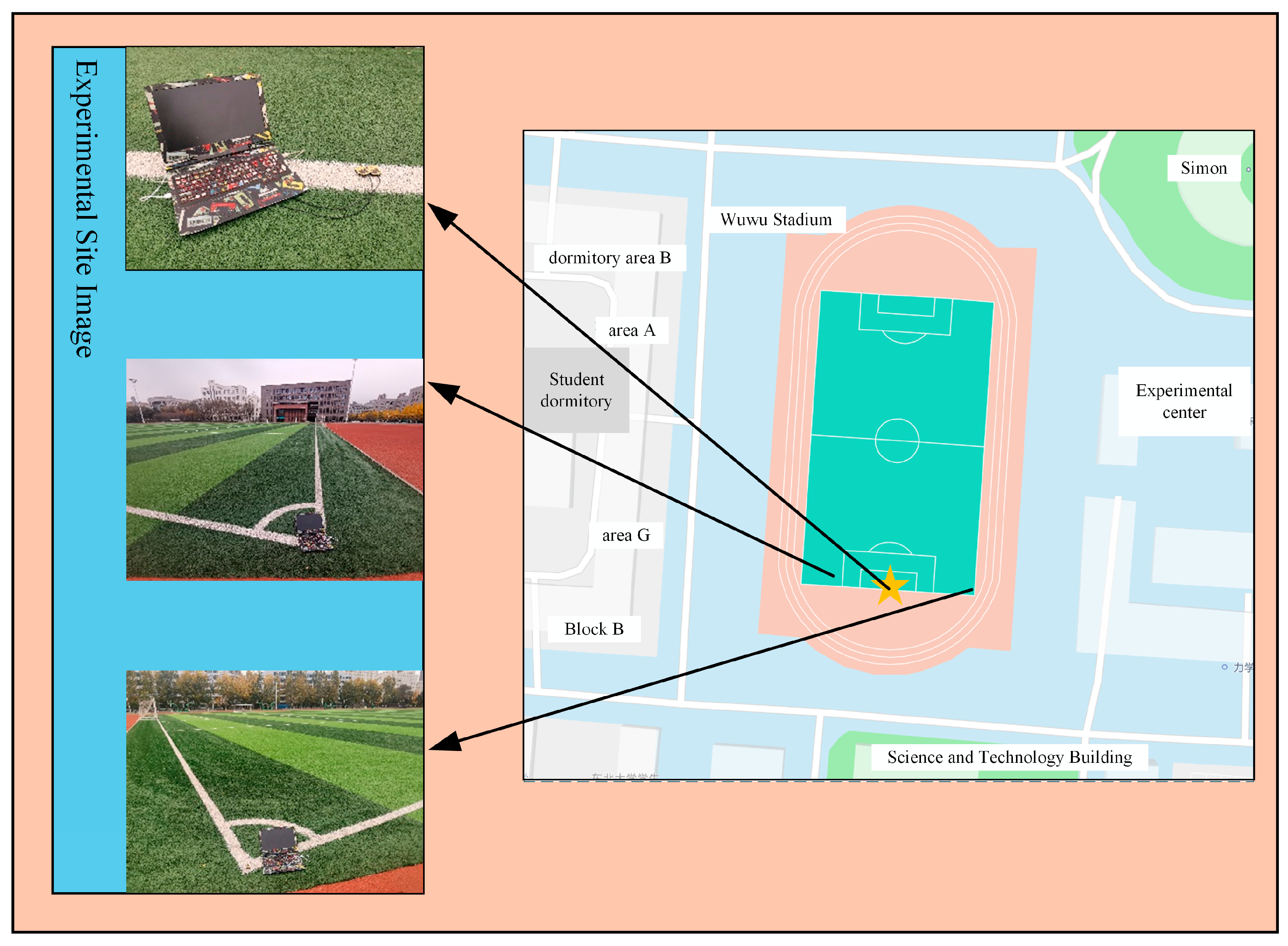
5.2.2. Experimental Platform Setup
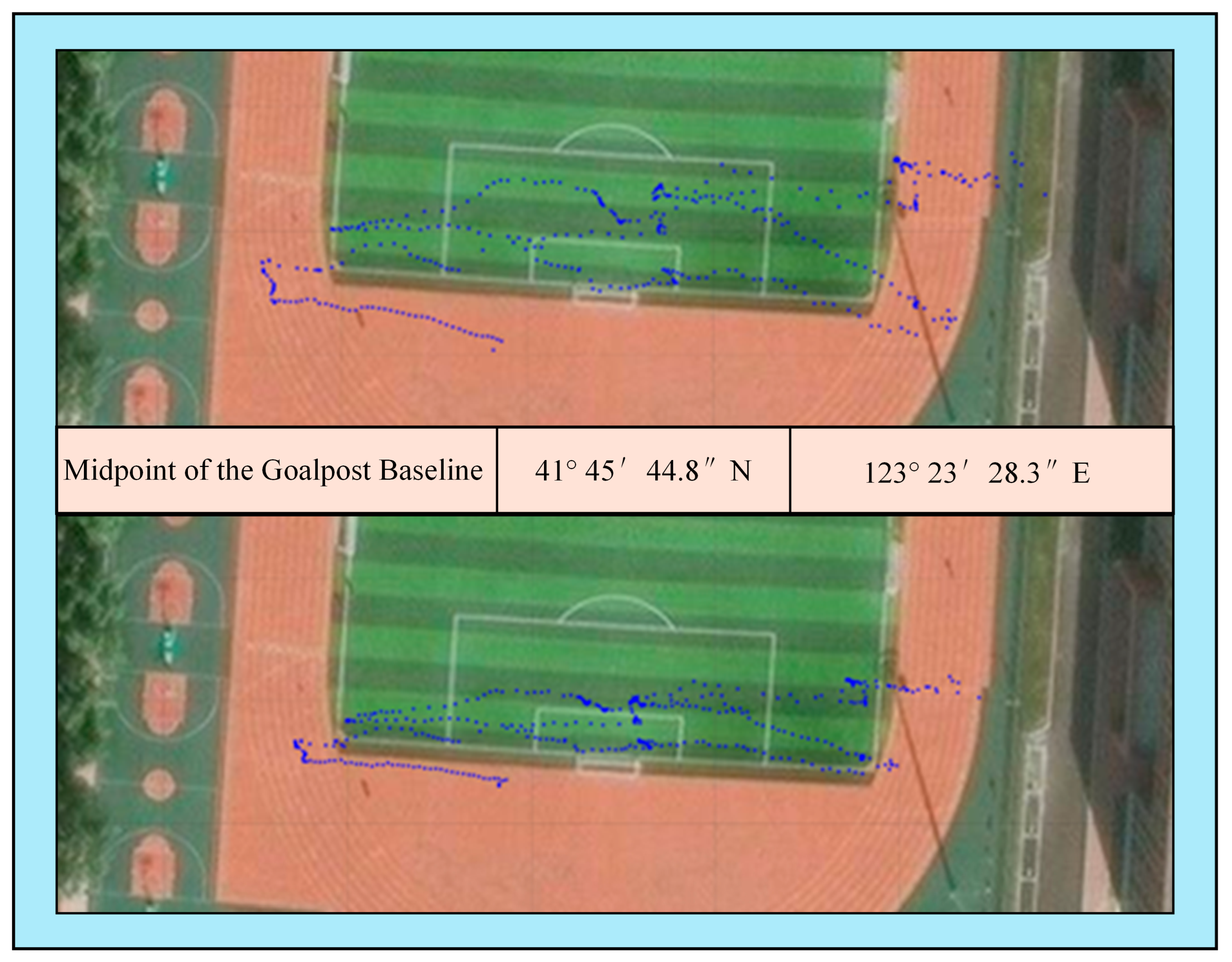
5.3. Experimental Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, Z.; Li, J.-L.; Zhao, X.-M.; Li, L.; Wang, Z.-R.; Tong, X.; Tian, B.; Hou, J.; Wang, G.-P.; Zhang, Q. A review on intelligent road and its related key technologies. China J. Highw. Transp. 2019, 32, 1–24. [Google Scholar]
- Liang, Z.C.; Wang, Z.N.; Zhao, J.; Wong, P.K.; Yang, Z.X.; Ding, Z.T. Fixed-time prescribed performance path-following control for autonomous vehicle with complete unknown parameters. IEEE Trans. Ind. Electron. 2023, 70, 8426–8436. [Google Scholar] [CrossRef]
- Xu, H.; Geng, D.; Fan, Z.; Wu, D.; Chen, M. An Automatic Vehicle Navigation System Based on Filters Integrating Inertial Navigation and Global Positioning Systems. Machines 2024, 12, 663. [Google Scholar] [CrossRef]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A Comprehensive Review of GNSS/INS Integration Techniques for Land and Air Vehicle Applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Guo, G.; Sun, X.; Liu, J. 5G/GNSS Integrated Vehicle Localization with Adaptive Step Size Kalman Filter. IEEE Trans. Veh. Technol. 2024, 73, 1458–1472. [Google Scholar] [CrossRef]
- Karlgaard, C.D.; Schaub, H. GPS/INS integration for dynamic environments: A review of recent developments. J. Guid. Control Dyn. 2020, 43, 987–1002. [Google Scholar]
- Wang, H.; Li, J. GPS/INS integration using tightly coupled approach for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 22, 5000–5010. [Google Scholar]
- Zhang, W.; Li, N.; Wang, L. Research on INS error prediction model based on deep neural network. J. Univ. Electron. Sci. Technol. China 2022, 51, 456–465. [Google Scholar]
- Wang, Z.Y.; Zhou, H.W.; Yu, G.Z.; Li, H.Z.; Liu, R.S.; Leng, R.; Xu, J.Y. Autonomous localization method for autonomous driving vehicles in feature degradation scenarios based on hierarchical optimization strategy. China J. Highw. Transp. 2024, 37, 303–316. [Google Scholar]
- Ge, Z.; Jiang, J.; Zhang, C.; Wang, L.; Li, Q. Application of Improved Robust and Adaptive EKF Algorithm in GNSS/INS Integrated Navigation. J. Geod. Geodyn. 2023, 43, 740–744. [Google Scholar]
- He, Y.; Li, J.; Liu, J. Research on GNSS INS & GNSS/INS integrated navigation method for autonomous vehicles: A survey. IEEE Access 2023, 11, 79033–79055. [Google Scholar] [CrossRef]
- Li, D.G.; Jia, X.; Zhao, J. A Novel Hybrid Fusion Algorithm for Low-Cost GPS/INS Integrated Navigation System During GPS Outages. IEEE Access 2020, 8, 46123–46134. [Google Scholar] [CrossRef]
- Wu, Z.; Li, X.; Shen, Z.; Chen, Y.; Zhang, R. A Failure-Resistant, Tightly Coupled GNSS/INS/Vision Integration for Urban Environments. IEEE Trans. Instrum. Meas. 2024, 73, 1–14. [Google Scholar]
- Singh, A.; Patel, D.; Chen, Z. Deep Learning-Based Sensor Fusion for Robust Vehicle Localization in Urban Canyons. GPS Solut. 2024, 28, 1–15. [Google Scholar]
- Li, W.; Cui, X.; Lu, M. A Robust Graph Optimization Realization of Tightly Coupled GNSS/INS Integrated Navigation System for Urban Vehicles. Tsinghua Sci. Technol. 2018, 23, 724–732. [Google Scholar] [CrossRef]
- Dai, H.-F.; Bian, H.-W.; Wang, R.-Y.; Ma, H. An INS/GNSS Integrated Navigation in GNSS-Denied Environment Using Recurrent Neural Network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Amami, M.M. The Advantages and Limitations of Low-Cost Single Frequency GPS/MEMS-Based INS Integration. Glob. J. Eng. Technol. Adv. 2022, 10, 18–31. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Sabatini, R. A High-Integrity and Low-Cost Navigation System for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 356–369. [Google Scholar] [CrossRef]
- Wei, X.K.; Li, J.; Zhang, D.B.; Feng, K.Q. An Improved Integrated Navigation Method with Enhanced Robustness Based on Factor Graph. Mech. Syst. Signal Process. 2021, 155, 107565. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, L.; Zhang, H. Robust GNSS/INS Integration Using Adaptive Kalman Filtering and Outlier Detection for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4567–4578. [Google Scholar]
- Feng, X.; Qiu, M.; Wang, T.; Yao, X.; Cong, H.; Zhang, Y. Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments. Vehicles 2025, 7, 77. [Google Scholar] [CrossRef]
- Al Hage, J.; Xu, P.; Bonnifait, P.; Ibanez-Guzman, J. Localization Integrity for Intelligent Vehicles Through Fault Detection and Position Error Characterization. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2978–2990. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone. Sensors 2020, 20, 6447. [Google Scholar] [CrossRef]
- Kim, J.; Lee, T.; Park, S. Multi-Sensor Fusion for Autonomous Vehicle Navigation in GNSS-Denied Environments: A Review. Sensors 2023, 21, 1234–1256. [Google Scholar]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Wang, X.M.; Li, N.; Zhang, W. Research on autonomous driving vehicle positioning technology based on multi-sensor fusion. Transp. Res. 2023, 9, 45–55. [Google Scholar]
- Zhang, H. Detailed analysis of INS errors and compensation methods. Nav. J. 2022, 12, 1–10. [Google Scholar]
- Liang, J.; Tian, Q.; Feng, J.; Pi, D.; Yin, G. A Polytopic Model-Based Robust Predictive Control Scheme for Path Tracking of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 3928–3939. [Google Scholar] [CrossRef]
- Li, Q.Q.; Jorge, P.Q.; Tuan, N.G. Multi-Sensor Fusion for Navigation and Mapping in Autonomous Vehicles: Accurate Localization in Urban Environments. Unmanned Syst. 2020, 8, 229–237. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Y.; Li, Q. Application research of differential positioning technology in improving GPS positioning accuracy. Surv. Mapp. Bull. 2024, 2, 45–49. [Google Scholar]
- Liu, X.; Zhao, Y.; Gupta, R. Differential GNSS Correction via Edge Computing for Real-Time Autonomous Vehicle Localization. IEEE Access 2021, 9, 56789–56801. [Google Scholar]
- Abdelmoniem, A.; Osama, A.; Abdelaziz, M. A Path-Tracking Algorithm Using Predictive Stanley Lateral Controller. Int. J. Adv. Robot. Syst. 2021, 18, 1–11. [Google Scholar] [CrossRef]
- Liang, Z.C.; Zhao, J.; Liu, B.; Wang, Y.F.; Ding, Z.T. Velocity-based path following control for autonomous vehicles to avoid exceeding road friction limits using sliding mode method. IEEE Trans. Intell. Transp. Syst. 2022, 22, 1947–1958. [Google Scholar] [CrossRef]
- Liang, J.; Yang, K.; Tan, C.; Wang, J.; Yin, G. Enhancing High-Speed Cruising Performance of Autonomous Vehicles Through Integrated Deep Reinforcement Learning Framework. IEEE Trans. Intell. Transp. Syst. 2025, 26, 835–848. [Google Scholar] [CrossRef]
- Liang, Z.C.; Shen, M.Y.; Li, Z.G.; Yang, J. Model-free output feedback path following control for autonomous vehicle with prescribed performance independent of initial conditions. IEEE/ASME Trans. Mechatron. 2024, 29, 1076–1087. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Z.; He, K.; Wang, Z.; Yang, H.; Zheng, J. Research on INS/GNSS Integrated Navigation Algorithm for Autonomous Vehicles Based on Pseudo-Range Single Point Positioning. Electronics 2025, 14, 3048. https://doi.org/10.3390/electronics14153048
Liang Z, He K, Wang Z, Yang H, Zheng J. Research on INS/GNSS Integrated Navigation Algorithm for Autonomous Vehicles Based on Pseudo-Range Single Point Positioning. Electronics. 2025; 14(15):3048. https://doi.org/10.3390/electronics14153048
Chicago/Turabian StyleLiang, Zhongchao, Kunfeng He, Zijian Wang, Haobin Yang, and Junqiang Zheng. 2025. "Research on INS/GNSS Integrated Navigation Algorithm for Autonomous Vehicles Based on Pseudo-Range Single Point Positioning" Electronics 14, no. 15: 3048. https://doi.org/10.3390/electronics14153048
APA StyleLiang, Z., He, K., Wang, Z., Yang, H., & Zheng, J. (2025). Research on INS/GNSS Integrated Navigation Algorithm for Autonomous Vehicles Based on Pseudo-Range Single Point Positioning. Electronics, 14(15), 3048. https://doi.org/10.3390/electronics14153048