
A Fixed-Time Convergence Method for Solving Aggregative Games with Malicious Players


Abstract
1. Introduction
- This work considers malicious players who are uncontrollable and can influence the evolution of normal players’ decisions. In contrast to existing works that consider perturbations and eliminate their effects using compensation methods [12,15,16,17,22], this work treats the influence of malicious attacks as less conservative and more representative of real-workd conditions, thereby rendering existing algorithms inapplicable.
- Due to the limited information exchange between neighbors, a virtual system and a distributed observer are introduced to detect and disconnect malicious players. A novel MPDD algorithm, based on the fixed-time convergence method, is proposed to ensure that all malicious players are disconnected from normal players within a fixed time.
- A predefined-time distributed NE-seeking algorithm is proposed, based on the time-varying TBG scheme, to ensure that the decisions of all normal players converge to an arbitrarily small neighborhood of the NE within the predefined time and exponentially converge to the NE after the predefined time. Convergence analysis is performed using Lyapunov stability theory.
2. Preliminaries
2.1. Graph Theory
2.2. Problem Formulation
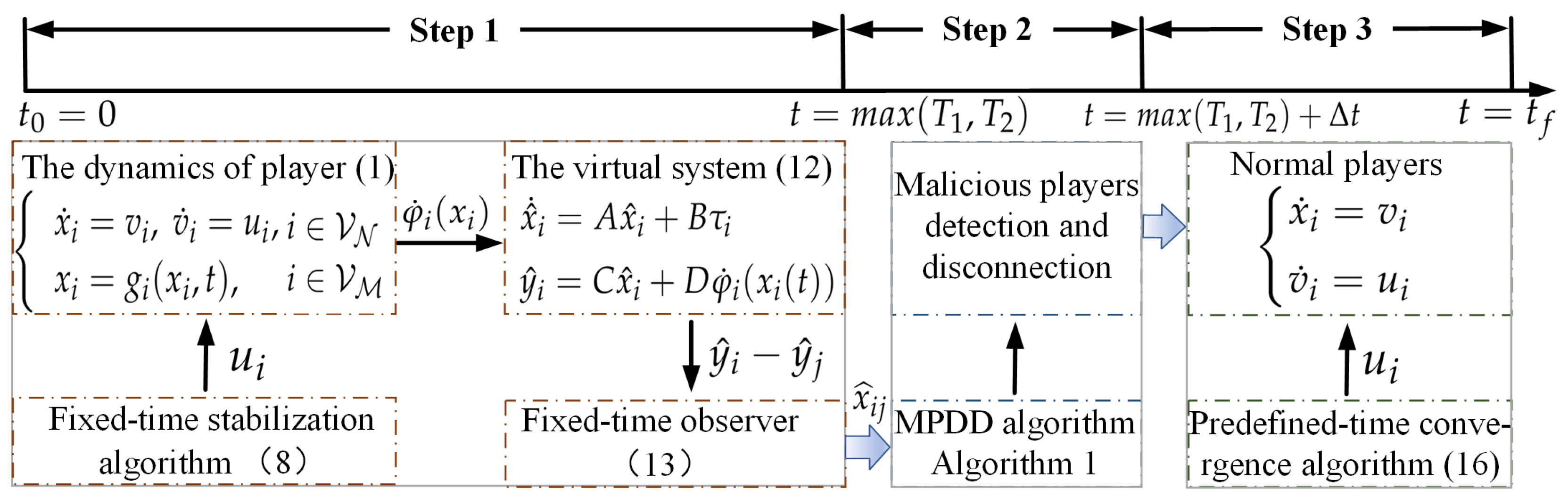
3. Algorithm Design for Aggregative Games with Malicious Players
- (1)
- Fixed-time stability: A fixed-time stabilization algorithm is developed to ensure that the decisions of all normal players stabilize within a fixed time.
- (2)
- Malicious player detection and disconnection: A malicious player detection and isolation algorithm is designed to detect and disconnect each malicious player from the normal players.
- (3)
- Predefined-time convergence: A predefined-time distributed NE-seeking algorithm is proposed to ensure that all normal players’ decisions converge to the NE at the predefined time.
3.1. Fixed-Time Stabilization Algorithm
3.2. Detecting and Disconnecting Malicious Players
| Algorithm 1 MPDD algorithm |
|
3.3. Predefined-Time Convergence Algorithm
- (1)
- Problem Transformation: We introduce fixed-time stabilization to generate a detectable signal (specifically, the constancy of for normal agents versus its variability for malicious agents), thereby enabling the adaptation of observer-based detection to game-theoretic settings that lack inherent consensus mechanisms.
- (2)
- Time-Guaranteed Architecture: Unlike the asymptotic and finite-time detection methods in [27,28,29], our MPDD algorithm guarantees* fixed-time isolation within , while the TBG-based NE seeking achieves predefined-time convergence to equilibrium, which is a capability absent in prior game-theoretic works.
- (3)
- Unified Security-Game Framework: We unify malicious player mitigation and game-theoretic optimization into a single protocol with dual time guarantees, addressing security and performance objectives simultaneously. This framework diverges fundamentally from neighbor-value exclusion (e.g., MSR) or robust connectivity methods.
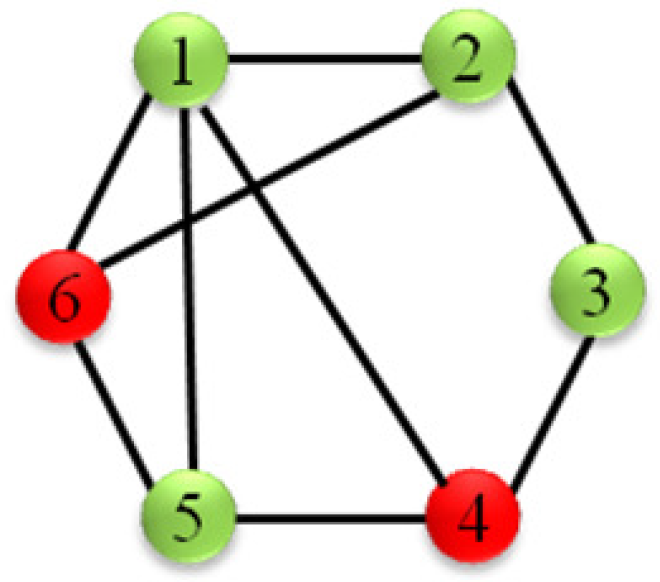
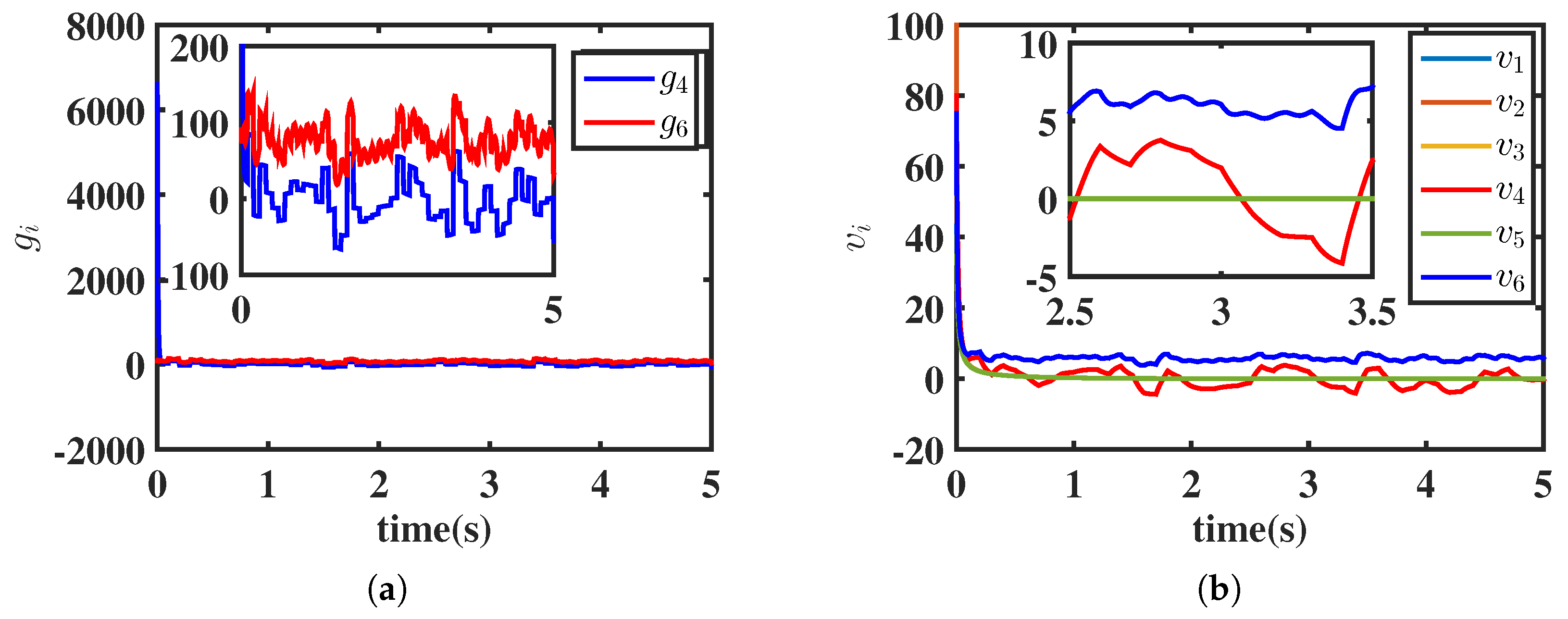
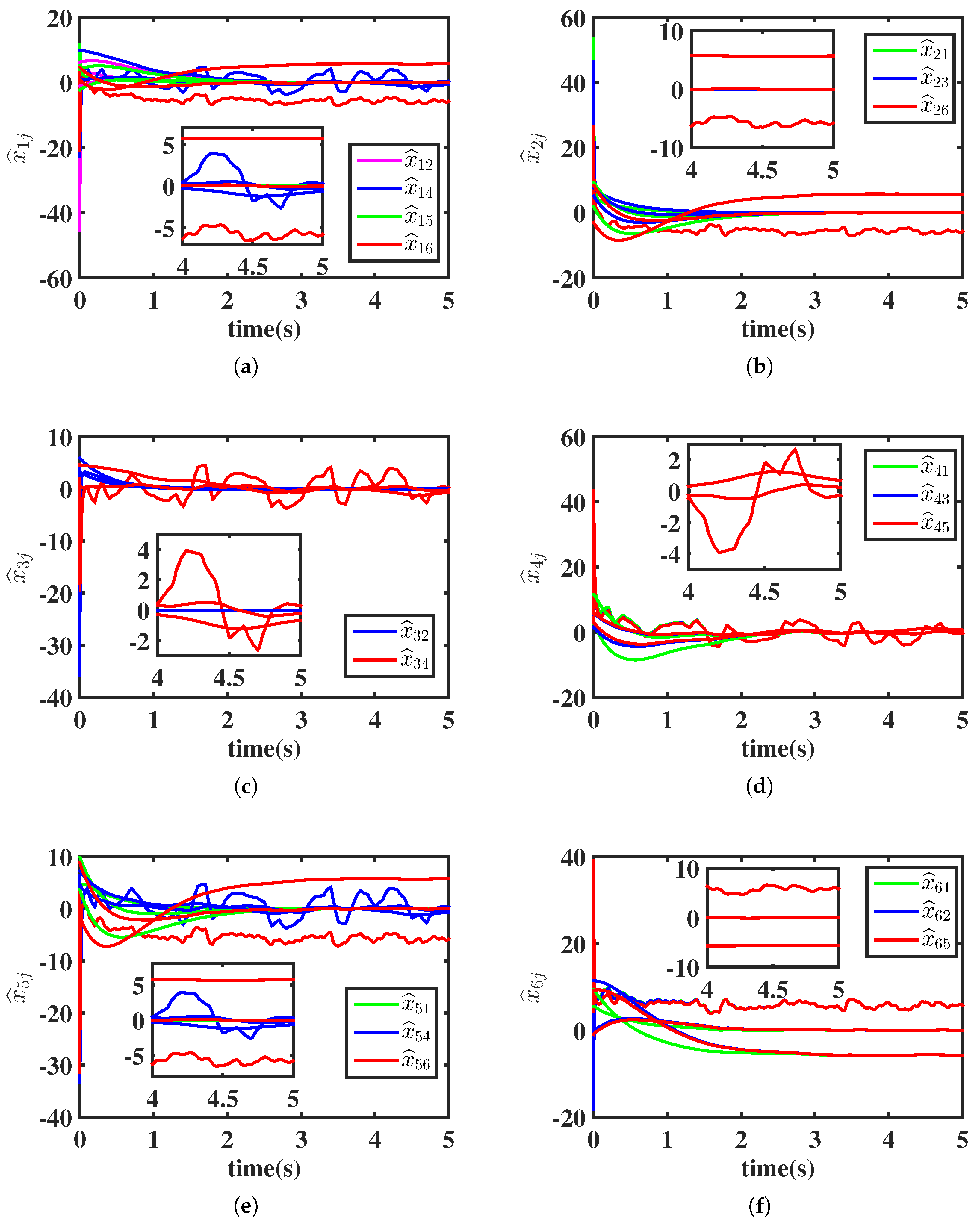
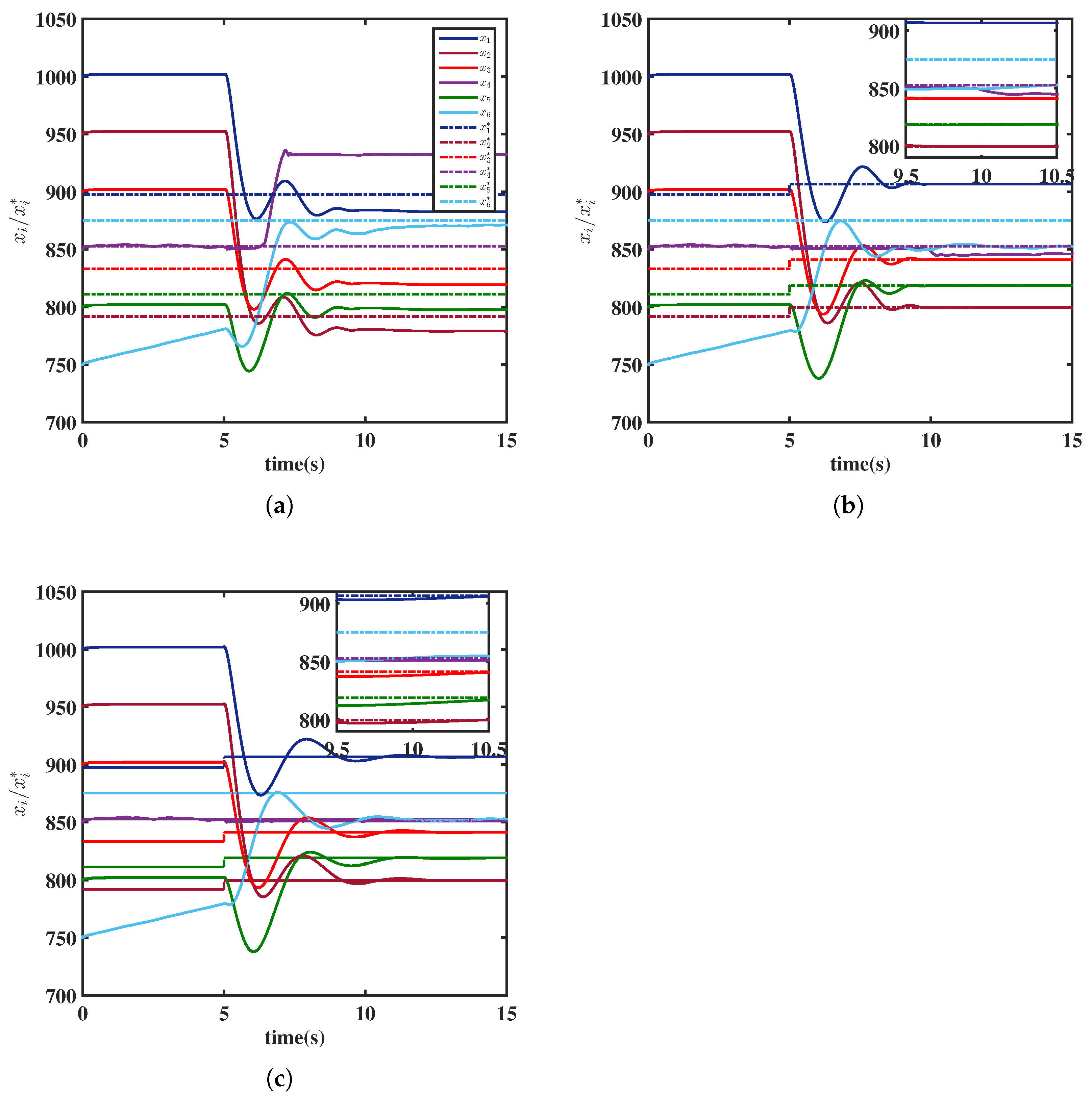
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Z.; Wu, Q.; Huang, S.; Wang, L.; Shahidehpour, M.; Xue, Y. Optimal Day-Ahead Charging Scheduling of Electric Vehicles Through an Aggregative Game Model. IEEE Trans. Smart Grid 2018, 9, 5173–5184. [Google Scholar] [CrossRef]
- Chen, Y.; Yi, P. Multi-Cluster Aggregative Games: A Linearly Convergent Nash Equilibrium Seeking Algorithm and Its Applications in Energy Management. IEEE Trans. Netw. Sci. Eng. 2024, 11, 2797–2809. [Google Scholar] [CrossRef]
- Wu, J.; Chen, Q.; Jiang, H.; Wang, H.; Xie, Y.; Xu, W.; Zhou, P.; Xu, Z.; Chen, L.; Li, B.; et al. Joint Power and Coverage Control of Massive UAVs in Post-Disaster Emergency Networks: An Aggregative Game-Theoretic Learning Approach. IEEE Trans. Netw. Sci. Eng. 2024, 11, 3782–3799. [Google Scholar] [CrossRef]
- Grammatico, S.; Parise, F.; Colombino, M.; Lygeros, J. Decentralized Convergence to Nash Equilibria in Constrained Deterministic Mean Field Control. IEEE Trans. Autom. Control 2016, 61, 3315–3329. [Google Scholar] [CrossRef]
- Belgioioso, G.; Grammatico, S. Semi-Decentralized Generalized Nash Equilibrium Seeking in Monotone Aggregative Games. IEEE Trans. Autom. Control 2023, 68, 140–155. [Google Scholar] [CrossRef]
- Zhu, Y.; Yu, W.; Wen, G.; Chen, G. Distributed Nash Equilibrium Seeking in an Aggregative Game on a Directed Graph. IEEE Trans. Autom. Control 2021, 66, 2746–2753. [Google Scholar] [CrossRef]
- Liang, S.; Yi, P.; Hong, Y. Distributed Nash equilibrium seeking for aggregative games with coupled constraints. Automatica 2017, 85, 179–185. [Google Scholar] [CrossRef]
- Gadjov, D.; Pavel, L. Single-Timescale Distributed GNE Seeking for Aggregative Games Over Networks via Forward-Backward Operator Splitting. IEEE Trans. Autom. Control 2021, 66, 3259–3266. [Google Scholar] [CrossRef]
- Liu, J.; Liao, X.; Dong, J.S.; Mansoori, A. Continuous-Time Distributed Generalized Nash Equilibrium Seeking in Nonsmooth Fuzzy Aggregative Games. IEEE Trans. Control Netw. Syst. 2024, 11, 1262–1274. [Google Scholar] [CrossRef]
- Liang, J.; Miao, H.; Li, K.; Tan, J.; Wang, X.; Luo, R.; Jiang, Y. A Review of Multi-Agent Reinforcement Learning Algorithms. Electronics 2025, 14, 820. [Google Scholar] [CrossRef]
- Zeng, W.; Yan, X.; Mo, F.; Zhang, Z.; Li, S.; Wang, P.; Wang, C. Knowledge-Enhanced Deep Reinforcement Learning for Multi-Agent Game. Electronics 2025, 14, 1347. [Google Scholar] [CrossRef]
- Deng, Z. Distributed Nash equilibrium seeking for aggregative games with second-order nonlinear players. Automatica 2022, 135, 109980. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, G. Distributed Optimization for Aggregative Games Based on Euler-Lagrange Systems With Large Delay Constraints. IEEE Access 2020, 8, 179272–179280. [Google Scholar] [CrossRef]
- Huang, Y.; Meng, Z.; Sun, J. Distributed Nash Equilibrium Seeking for Multicluster Aggregative Game of Euler–Lagrange Systems With Coupled Constraints. IEEE Trans. Cybern. 2024, 54, 5672–5683. [Google Scholar] [CrossRef] [PubMed]
- Cai, X.; Xiao, F.; Wei, B.; Yu, M.; Fang, F. Nash Equilibrium Seeking for General Linear Systems With Disturbance Rejection. IEEE Trans. Cybern. 2023, 53, 5240–5249. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liang, S.; Wang, X.; Ji, H. Distributed Nash Equilibrium Seeking for Aggregative Games With Nonlinear Dynamics Under External Disturbances. IEEE Trans. Cybern. 2020, 50, 4876–4885. [Google Scholar] [CrossRef]
- Huang, B.; Zou, Y.; Meng, Z. Distributed-Observer-Based Nash Equilibrium Seeking Algorithm for Quadratic Games With Nonlinear Dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7260–7268. [Google Scholar] [CrossRef]
- Ye, M. Distributed Nash Equilibrium Seeking for Games in Systems With Bounded Control Inputs. IEEE Trans. Autom. Control 2021, 66, 3833–3839. [Google Scholar] [CrossRef]
- Shi, X.; Su, Y.; Huang, D.; Sun, C. Distributed Aggregative Game for Multi-Agent Systems With Heterogeneous Integrator Dynamics. IEEE Trans. Circuits Syst. II Express Br. 2024, 71, 2169–2173. [Google Scholar] [CrossRef]
- Ai, X.; Wang, L. Distributed adaptive Nash equilibrium seeking and disturbance rejection for noncooperative games of high-order nonlinear systems with input saturation and input delay. Int. J. Robust Nonlinear Control 2021, 31, 2827–2846. [Google Scholar] [CrossRef]
- Tan, S.; Wang, Y.; Vasilakos, A.V. Distributed Population Dynamics for Searching Generalized Nash Equilibria of Population Games With Graphical Strategy Interactions. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3263–3272. [Google Scholar] [CrossRef]
- Li, S.; Nian, X.; Deng, Z. Distributed resource allocation of second-order multiagent systems with exogenous disturbances. Int. J. Robust Nonlinear Control 2020, 30, 1298–1310. [Google Scholar] [CrossRef]
- Huang, B.; Zou, Y.; Meng, Z.; Ren, W. Distributed Time-Varying Convex Optimization for a Class of Nonlinear Multiagent Systems. IEEE Trans. Autom. Control 2020, 65, 801–808. [Google Scholar] [CrossRef]
- Liu, H.; Cheng, H.; Zhang, Y. Event-Triggered Discrete-Time ZNN Algorithm for Distributed Optimization with Time-Varying Objective Functions. Electronics 2025, 14, 1359. [Google Scholar]
- Du, Y.; Wang, Y.; Zuo, Z.; Zhang, W. Stochastic bipartite consensus with measurement noises and antagonistic information. J. Frankl. Inst. 2021, 358, 7761–7785. [Google Scholar] [CrossRef]
- Zhai, Y.; Liu, Z.W.; Guan, Z.H.; Wen, G. Resilient Consensus of Multi-Agent Systems With Switching Topologies: A Trusted-Region-Based Sliding-Window Weighted Approach. IEEE Trans. Circuits Syst. II Express Br. 2021, 68, 2448–2452. [Google Scholar] [CrossRef]
- Zhai, Y.; Liu, Z.W.; Guan, Z.H.; Gao, Z. Resilient Delayed Impulsive Control for Consensus of Multiagent Networks Subject to Malicious Agents. IEEE Trans. Cybern. 2022, 52, 7196–7205. [Google Scholar] [CrossRef]
- Zhao, D.; Lv, Y.; Yu, X.; Wen, G.; Chen, G. Resilient Consensus of Higher Order Multiagent Networks: An Attack Isolation-Based Approach. IEEE Trans. Autom. Control 2022, 67, 1001–1007. [Google Scholar] [CrossRef]
- Zhou, J.; Lv, Y.; Wen, G.; Yu, X. Resilient Consensus of Multiagent Systems Under Malicious Attacks: Appointed-Time Observer-Based Approach. IEEE Trans. Cybern. 2022, 52, 10187–10199. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.; Zhang, X.; Ding, D.; Ning, B. Distributed coordination control of multi-agent systems under intermittent sampling and communication: A comprehensive survey. Sci. China Inf. Sci. 2025, 68, 151201. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q.; Ge, X.; Ding, D.; Ning, B.; Zhang, B. An overview of recent advances in event-triggered control. Sci. China Inf. Sci. 2025, 68, 161201. [Google Scholar] [CrossRef]
- Belgioioso, G.; Nedić, A.; Grammatico, S. Distributed Generalized Nash Equilibrium Seeking in Aggregative Games on Time-Varying Networks. IEEE Trans. Autom. Control 2021, 66, 2061–2075. [Google Scholar] [CrossRef]
- Godsil, C.; Royle, G. Algebraic Graph Theory; Springer: New York, NY, USA, 2001. [Google Scholar]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Lv, Y.; Wen, G.; Huang, T. Adaptive Protocol Design For Distributed Tracking With Relative Output Information: A Distributed Fixed-Time Observer Approach. IEEE Trans. Control Netw. Syst. 2020, 7, 118–128. [Google Scholar] [CrossRef]
- Guo, Z.; Chen, G. Predefined-Time Distributed Optimal Allocation of Resources: A Time-Base Generator Scheme. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 438–447. [Google Scholar] [CrossRef]
- Li, S.; Nian, X.; Deng, Z.; Chen, Z. Predefined-time distributed optimization of general linear multi-agent systems. Inf. Sci. 2022, 584, 111–125. [Google Scholar] [CrossRef]
- Strang, G. The fundamental theorem of linear algebra. Am. Math. Mon. 1993, 100, 848–855. [Google Scholar] [CrossRef]
- Kazemy, A.; Lam, J.; Zhang, X.M. Event-Triggered Output Feedback Synchronization of Master–Slave Neural Networks Under Deception Attacks. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 952–961. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator | ||||||
|---|---|---|---|---|---|---|
| #1 | 213 | 11.669 | 0.00533 | 1000 | 50 | 560 |
| #2 | 200 | 10.333 | 0.00889 | 950 | 100 | 720 |
| #3 | 240 | 10.833 | 0.00741 | 900 | 60 | 650 |
| #4 | 230 | 11.025 | 0.00678 | 850 | 80 | 460 |
| #5 | 225 | 10.667 | 0.00812 | 800 | 40 | 610 |
| #6 | 234 | 11.324 | 0.00605 | 750 | 75 | 760 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Zeng, Z.; Fu, H.; Chen, Z. A Fixed-Time Convergence Method for Solving Aggregative Games with Malicious Players. Electronics 2025, 14, 2998. https://doi.org/10.3390/electronics14152998
He X, Zeng Z, Fu H, Chen Z. A Fixed-Time Convergence Method for Solving Aggregative Games with Malicious Players. Electronics. 2025; 14(15):2998. https://doi.org/10.3390/electronics14152998
Chicago/Turabian StyleHe, Xuan, Zhengchao Zeng, Haolong Fu, and Zhao Chen. 2025. "A Fixed-Time Convergence Method for Solving Aggregative Games with Malicious Players" Electronics 14, no. 15: 2998. https://doi.org/10.3390/electronics14152998
APA StyleHe, X., Zeng, Z., Fu, H., & Chen, Z. (2025). A Fixed-Time Convergence Method for Solving Aggregative Games with Malicious Players. Electronics, 14(15), 2998. https://doi.org/10.3390/electronics14152998