
Research on Pole-to-Ground Fault Ride-Through Strategy for Hybrid Half-Wave Alternating MMC



Abstract
1. Introduction
2. Topology and Operation Principle of HHA-MMC
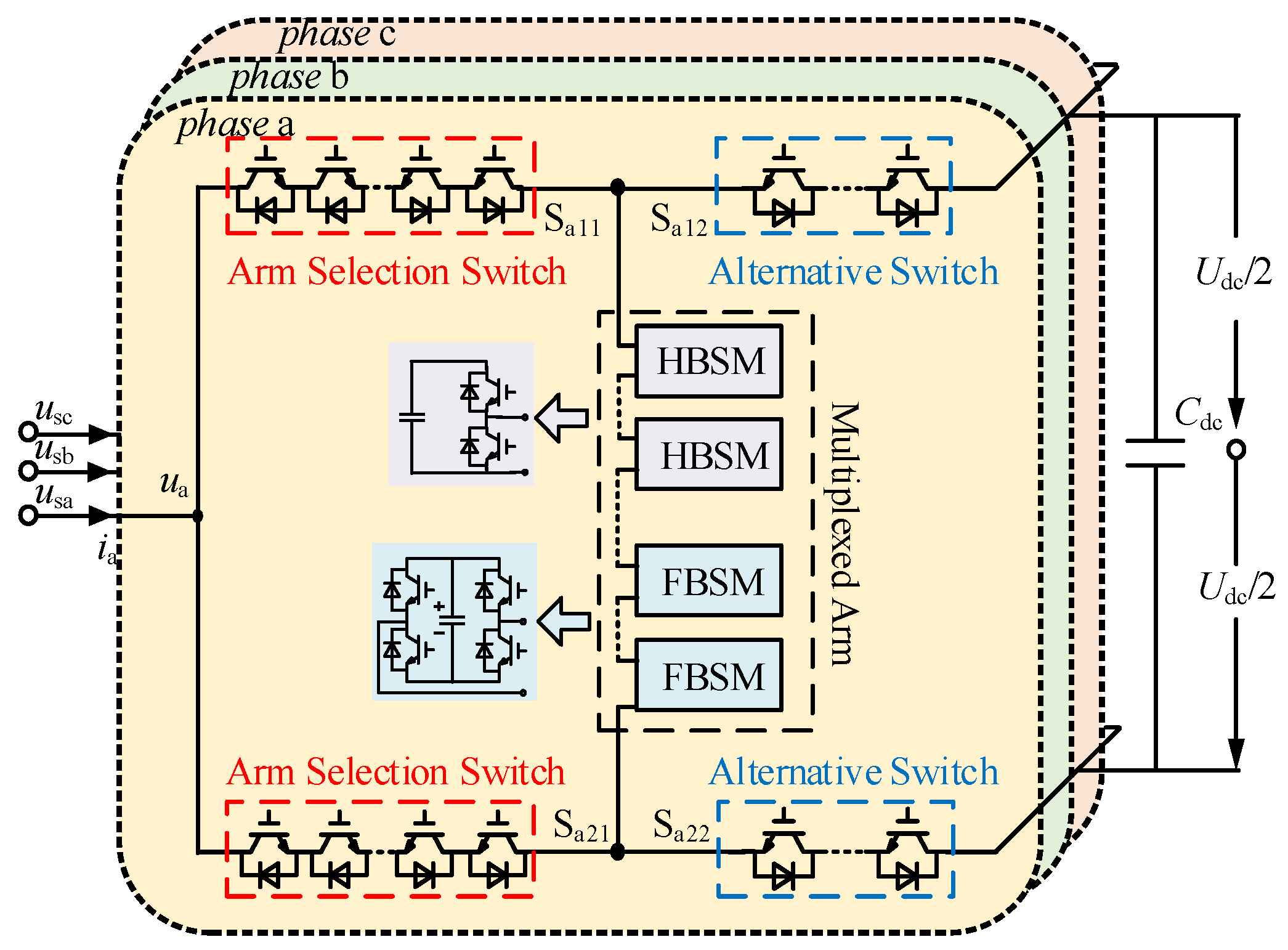
2.1. Topology Description
2.2. Operation Principle
3. Analysis of Pole-to-Ground Fault Characteristics in HHA-MMC
4. Fault Ride-Through Strategy for PTG DC Fault in HHA-MMC
- (1)
- Rapid Overvoltage and Fault Current Elimination
- (2)
- Dynamic Energy Balancing
4.1. Half-Wave Shift Non-Blocking Fault Ride-Through Mechanism
4.2. Dual-Modulation Energy Balancing Mechanism
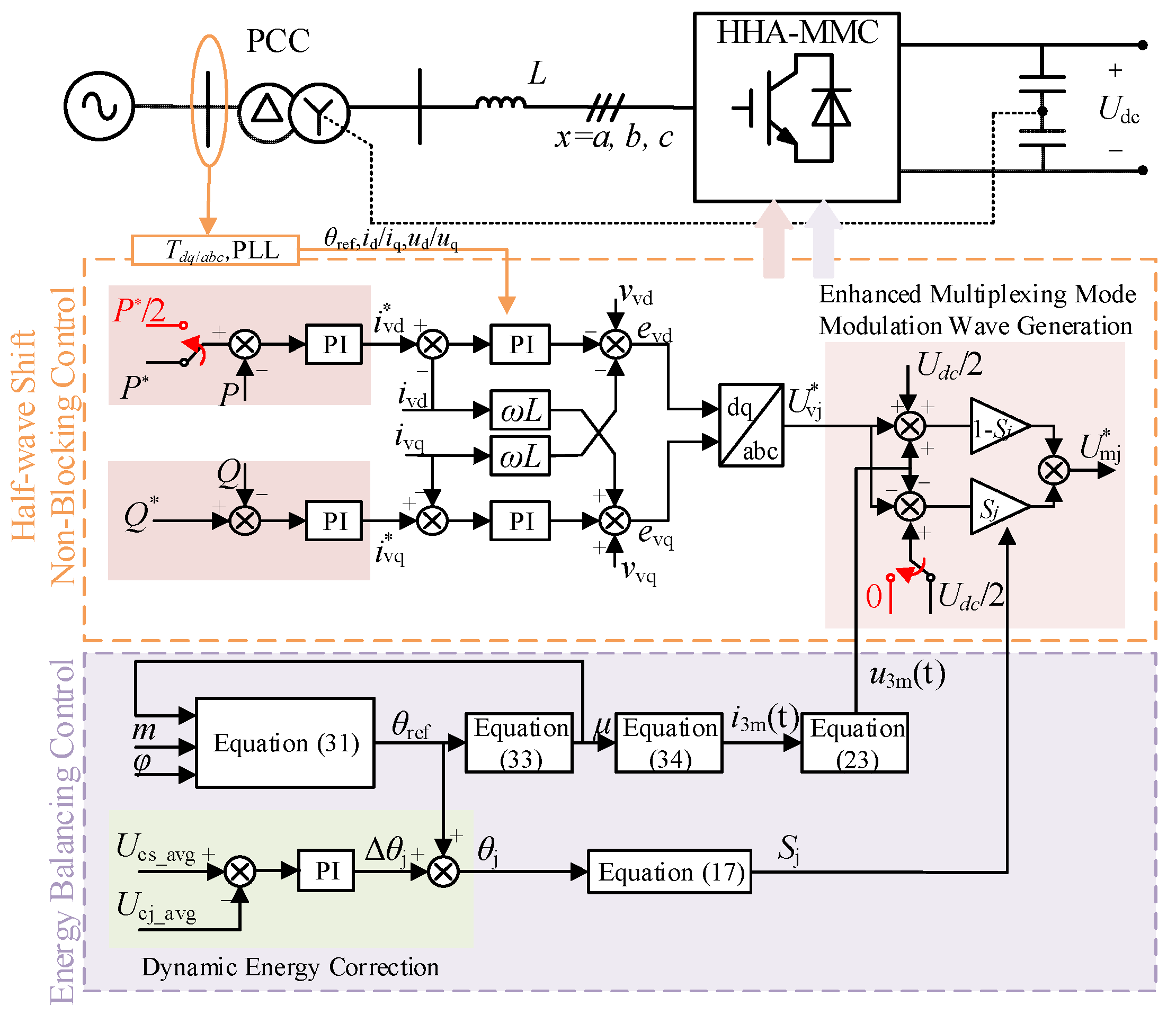
4.3. Control Diagram for Pole-to-Ground Fault Ride-Through Strategy
5. Simulation Results
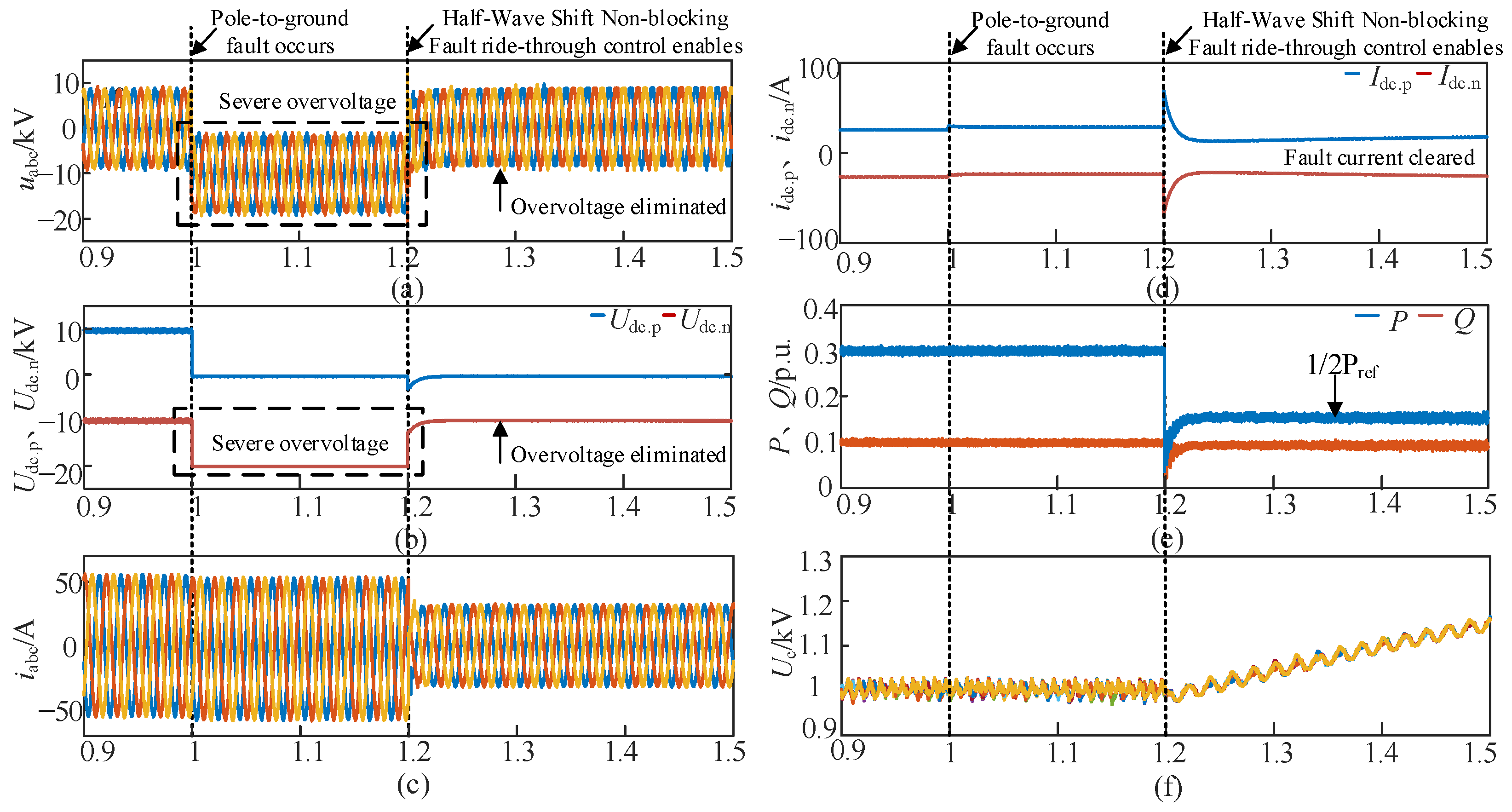
5.1. Fault Ride-Through Results for HF-MMC
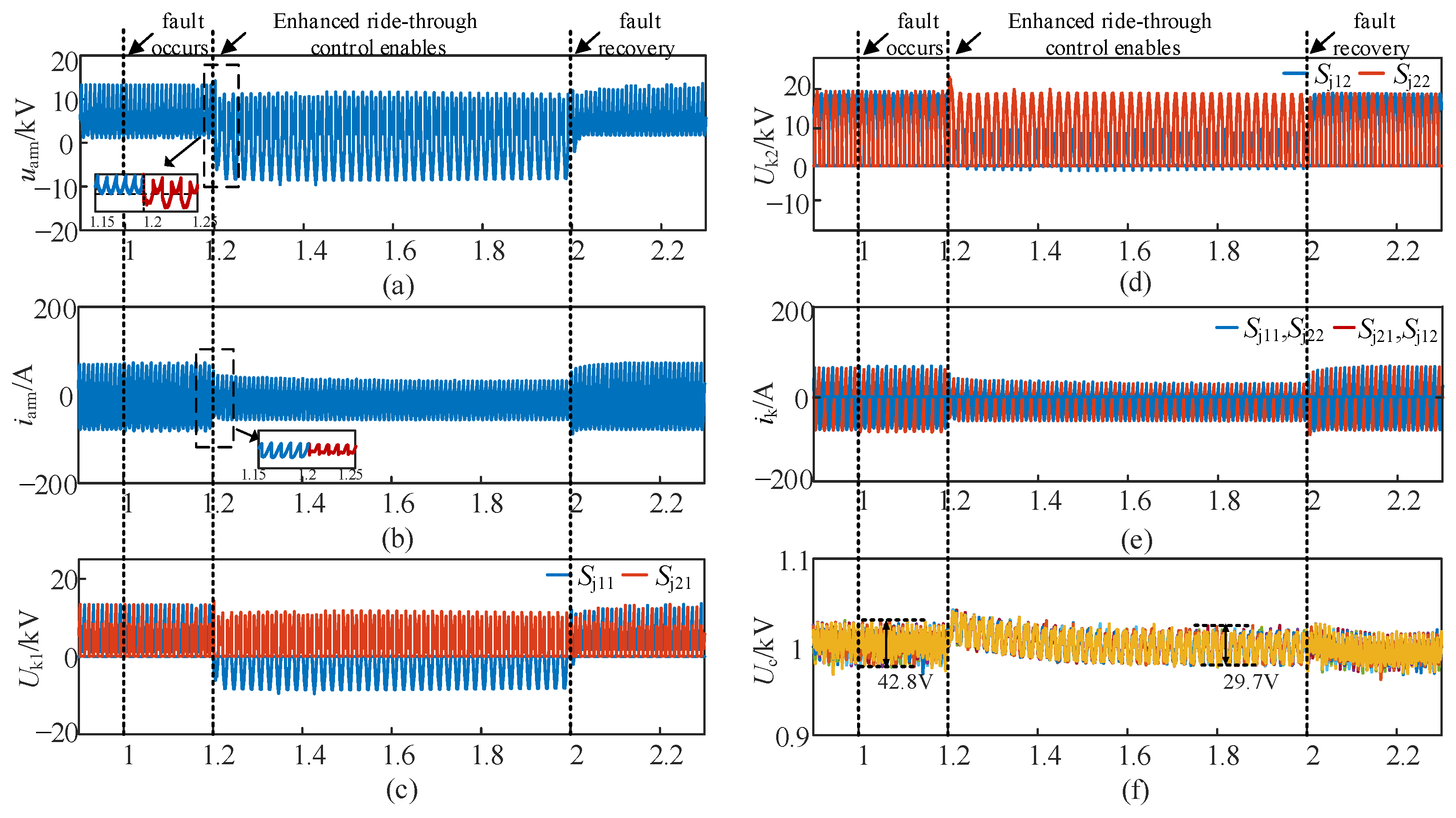
5.2. Fault Ride-Through Results for HHA-MMC
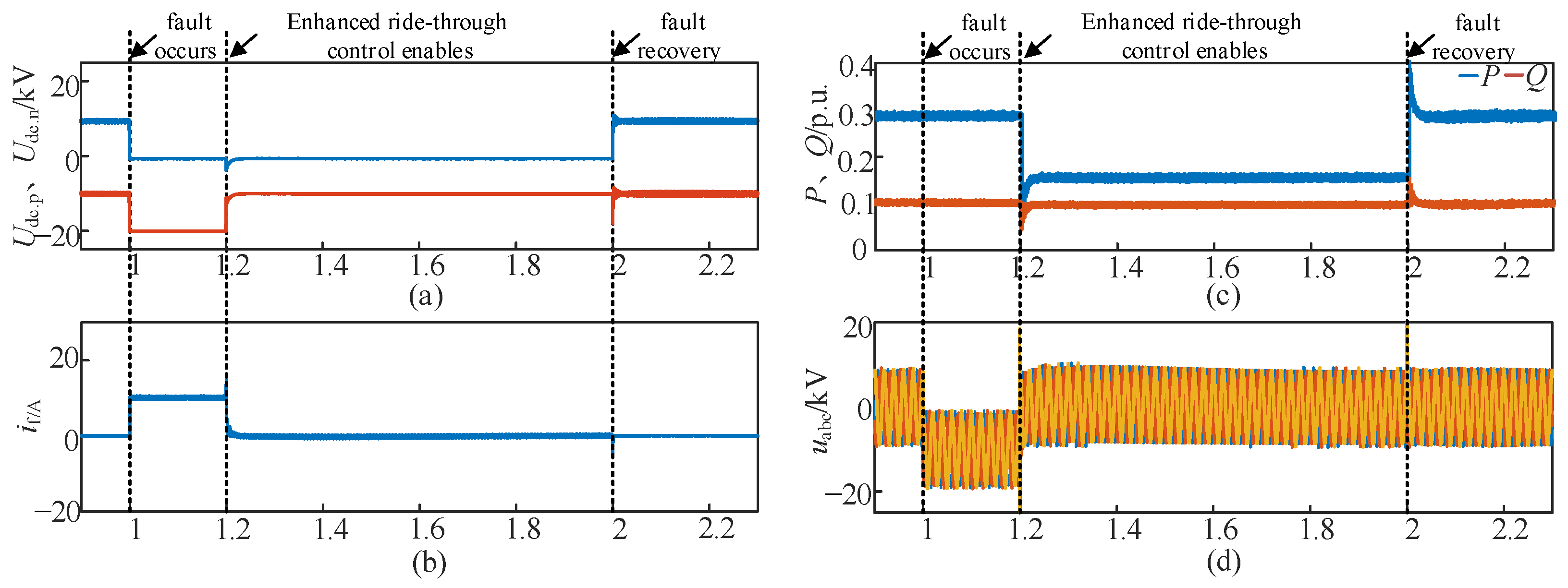
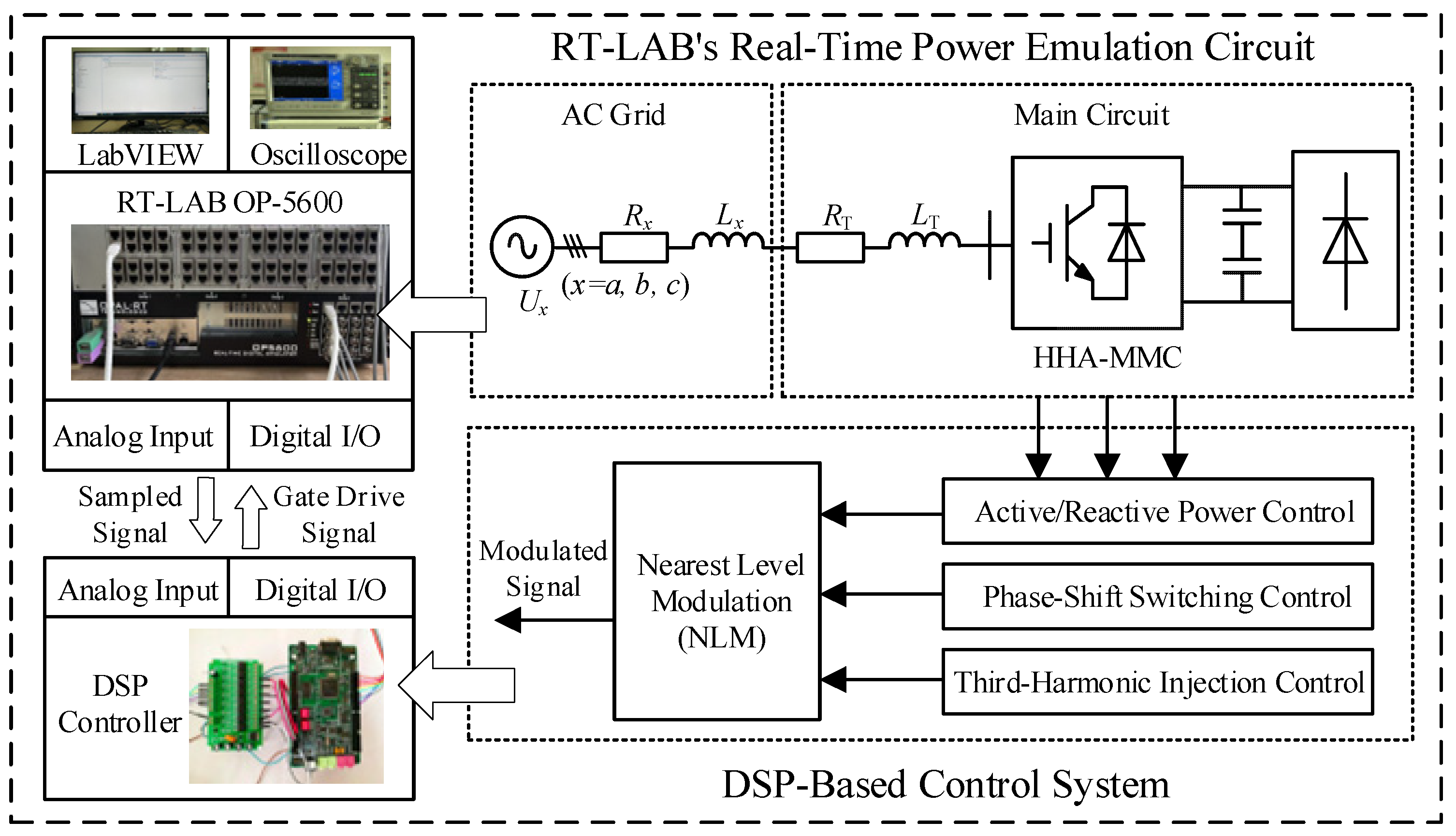
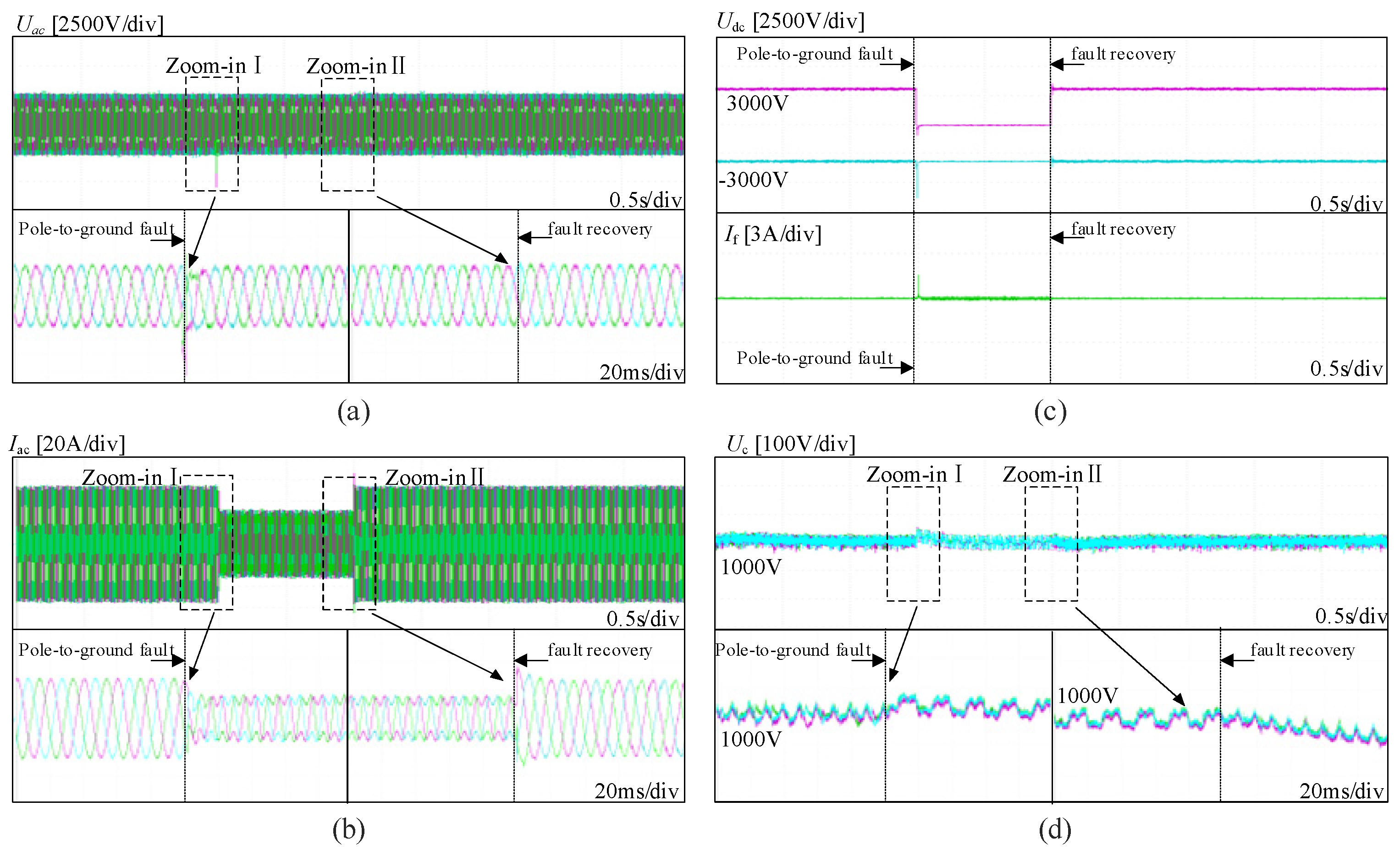
6. Experimental Validations
7. Conclusions
- (1)
- Compared with the conventional HF-MMC, the proposed HHA-MMC configured with 61% FBSMs achieved comparable fault ride-through capability while reducing the submodule count by 59%, demonstrating significant advantages in converter lightweight design and operational reliability.
- (2)
- Based on the full-time arm multiplexing characteristic of the HHA-MMC, a half-wave shift non-blocking fault ride-through strategy was proposed. By utilizing the negative voltage output capability of FBSMs to adjust the arm output voltage exclusively during the faulty pole conduction half-cycle, the strategy effectively eliminated both fault current and system overvoltage.
- (3)
- To address the arm energy imbalance, a dual-modulation energy balancing control based on third-harmonic injection and phase-shifted angle adjustment was proposed to dissipate accumulated arm energy. This strategy maintains capacitor voltages near nominal values while significantly reducing voltage ripple, demonstrating excellent energy equilibrium performance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| HHA-MMC | Hybrid half-wave alternating modular multilevel converter |
| SM | Submodule |
| HBSM | Half-bridge submodule |
| FBSM | Full-bridge submodule |
| DCCB | DC circuit breaker |
| Sj | Switching function of phase j (j = a, b, c) |
| m | Voltage modulation ratio |
| Udc | DC voltage (V) |
| Um | Fundamental frequency amplitudes of the AC phase voltage (V) |
| Im | Fundamental frequency amplitudes of the AC phase current (A) |
| If | Total fault current (A) |
| ΔEm | Multiplexed arm’s energy accumulation |
| Δucj | Capacitive voltage deviation |
| φ | Power factor angle |
| θ | Adjustable phase-shifted angle |
| U3m | Triple frequency amplitudes of the AC phase voltage (V) |
| I3m | Triple frequency amplitudes of the AC phase current (A) |
| α | Initial phase angle of the third-harmonic current |
| μ | Ratio of the third-harmonic current to the fundamental current amplitude |
References
- Wang, W.; Li, G.; Guo, J. Large-Scale Renewable Energy Transmission by HVDC: Challenges and Proposals. Engineering 2022, 19, 252–267. [Google Scholar] [CrossRef]
- Zhang, Y.; Ravishankar, J.; Fletcher, J.; Li, R.; Han, M. Review of Modular Multilevel Converter Based Multi-Terminal HVDC Systems for Offshore Wind Power Transmission. Renew. Sustain. Energy Rev. 2016, 61, 572–586. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Fuentes, R.L.; Perez, M.; Zargari, N.R. Evolution of Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1631–1656. [Google Scholar] [CrossRef]
- Wang, C.; Xu, J.; Pan, X.; Gong, W.; Zhu, Z.; Xu, S. Impedance Modeling and Analysis of Series-Connected Modular Multilevel Converter (MMC) and Its Comparative Study with Conventional MMC for HVDC Applications. IEEE Trans. Power Deliv. 2022, 37, 3270–3281. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, Control, and Applications of the Modular Multilevel Converter: A Review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Li, R.; Yu, L.; Xu, L.; Adam, G.P. Coordinated Control of Parallel DR-HVDC and MMC-HVDC Systems for Offshore Wind Energy Transmission. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2572–2582. [Google Scholar] [CrossRef]
- Ma, D.; Chen, W.; Shu, L.; Qu, X.; Hou, K. A MMC-Based Multiport Power Electronic Transformer with Shared Medium-Frequency Transformer. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 727–731. [Google Scholar] [CrossRef]
- Lacerda, V.A.; Monaro, R.M.; Campos-Gaona, D.; Pena-Alzola, R.; Coury, D.V. An Approximated Analytical Model for Pole-to-Ground Faults in Symmetrical Monopole MMC-HVDC Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 7009–7017. [Google Scholar] [CrossRef]
- Li, X.; Song, Q.; Liu, W.; Rao, H.; Xu, S.; Li, L. Protection of Nonpermanent Faults on DC Overhead Lines in MMC-Based HVDC Systems. IEEE Trans. Power Deliv. 2013, 28, 483–490. [Google Scholar] [CrossRef]
- Fan, S.; Chen, C.; Yang, H.; Xiang, X.; Yang, H.; Li, W.; He, X. A Cost-Effective and DC-Fault Tolerant Alternate Arm Converter with Wide Range Voltage Adaptability. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 6673–6686. [Google Scholar] [CrossRef]
- Hu, J.; Xiang, M.; Lin, L.; Lu, M.; Zhu, J.; He, Z. Improved Design and Control of FBSM MMC with Boosted AC Voltage and Reduced DC Capacitance. IEEE Trans. Ind. Electron. 2018, 65, 1919–1930. [Google Scholar] [CrossRef]
- Sun, P.; Tian, Y.; Pou, J.; Konstantinou, G. Beyond the MMC: Extended Modular Multilevel Converter Topologies and Applications. IEEE Open J. Power Electron. 2022, 3, 317–333. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Wang, C.; Tao, J. A Hybrid Arm-multiplexing MMC for DC Fault Ride-through without Blocking. IET Renew. Power Gener. 2023, 17, 2225–2235. [Google Scholar] [CrossRef]
- Merlin, M.M.C.; Green, T.C.; Mitcheson, P.D.; Trainer, D.R.; Critchley, R.; Crookes, W.; Hassan, F. The Alternate Arm Converter: A New Hybrid Multilevel Converter with DC-Fault Blocking Capability. IEEE Trans. Power Deliv. 2014, 29, 310–317. [Google Scholar] [CrossRef]
- Yu, Y.; Gao, Y.; Wang, Y.; Li, Y.; Su, Z.; Wang, R. A Half-Wave Alternating Multilevel Converter with High Submodule Utilization. In Proceedings of the IECON 2023—49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 16 October 2023; IEEE: Singapore, 2023; pp. 1–6. [Google Scholar]
- Huang, M.; Li, W.; Zou, J.; Ma, X. Analysis and Design of a Novel Hybrid Modular Multilevel Converter with Time-Sharing Alternative Arm Converter. IEEE Trans. Ind. Electron. 2024, 71, 14–26. [Google Scholar] [CrossRef]
- Ma, J.; Peng, Y.; Su, Z.; Gu, Y.; Ni, Q.; Yang, Y.; Wang, Y.; Liu, J. Half-Wave Phase Shift Modulation for Hybrid Modular Multilevel Converter with Wide-Range Operation. Electronics 2024, 13, 3556. [Google Scholar] [CrossRef]
- Zhao, C.; Li, T.; Yu, L.; Huang, Y.; Li, L.; Li, X. DC pole-to-ground fault characteristic analysis and converter fault recovery strategy of MMC-HVDC. Proc. CSEE 2014, 34, 3518–3526. [Google Scholar]
- Lee, Y.; Cui, S.; Kim, S.; Sul, S.-K. Control of Hybrid HVDC Transmission System with LCC and FB-MMC. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 15–18 September 2014; IEEE: Pittsburgh, PA, USA, 2014; pp. 475–482. [Google Scholar]
- Luo, Y.; Xu, L.; Xiong, X.; Li, Y. Pole-to-ground DC fault protection of MMC-MTDC systems. Trans. China Electrotech. Soc. 2017, 32, 98–106. [Google Scholar]
- Cui, S.; Sul, S.-K. A Comprehensive DC Short-Circuit Fault Ride through Strategy of Hybrid Modular Multilevel Converters (MMCs) for Overhead Line Transmission. IEEE Trans. Power Electron. 2016, 31, 7780–7796. [Google Scholar] [CrossRef]
- Lin, W.; Jovcic, D.; Nguefeu, S.; Saad, H. Full-Bridge MMC Converter Optimal Design to HVDC Operational Requirements. IEEE Trans. Power Deliv. 2016, 31, 1342–1350. [Google Scholar] [CrossRef]
- Zeng, R.; Xu, L.; Yao, L.; Finney, S.J. Analysis and Control of Modular Multilevel Converters under Asymmetric Arm Impedance Conditions. IEEE Trans. Ind. Electron. 2016, 63, 71–81. [Google Scholar] [CrossRef]
- Lu, M.; Hu, J.; Zeng, R.; He, Z. Fundamental-Frequency Reactive Circulating Current Injection for Capacitor Voltage Balancing in Hybrid-MMC HVDC Systems during Riding through PTG Faults. IEEE Trans. Power Deliv. 2018, 33, 1348–1357. [Google Scholar] [CrossRef]
- Xiang, W.; Lin, W.; Xu, L.; Wen, J. Enhanced Independent Pole Control of Hybrid MMC-HVdc System. IEEE Trans. Power Deliv. 2018, 33, 861–872. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Z.; Fu, J. A Novel Strategy on Smooth Connection of an Offline MMC Station into MTDC Systems. IEEE Trans. Power Deliv. 2016, 31, 568–574. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Converter | Submodule Capacitor | IGBT |
|---|---|---|
| HHA-MMC | 0.82N × 3 | 6.64N × 3 |
| HF-MMC | 2N × 3 | 6N × 3 |
| Parameters | Symbol | Values |
|---|---|---|
| DC-link voltage | Udc | 20 kV |
| Number of SMs per phase | 0.82N | 17 |
| Modulation ratio | m | 0.816 |
| SM capacitor | C | 3 mF |
| SM capacitor rated voltage | UcN | 1000 V |
| Cable resistance | Rdc | 9.3 Ω |
| Cable inductance | Ldc | 10 mH |
| DC-side filter capacitance | Cdc | 2 mF |
| Grounding resistance | Rg | 1000 Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Y.; Wang, Y.; Gao, Y.; Su, Z.; Song, X.; Wu, X.; Gu, Y. Research on Pole-to-Ground Fault Ride-Through Strategy for Hybrid Half-Wave Alternating MMC. Electronics 2025, 14, 2893. https://doi.org/10.3390/electronics14142893
Ding Y, Wang Y, Gao Y, Su Z, Song X, Wu X, Gu Y. Research on Pole-to-Ground Fault Ride-Through Strategy for Hybrid Half-Wave Alternating MMC. Electronics. 2025; 14(14):2893. https://doi.org/10.3390/electronics14142893
Chicago/Turabian StyleDing, Yanru, Yi Wang, Yuhua Gao, Zimeng Su, Xiaoyu Song, Xiaoyin Wu, and Yilei Gu. 2025. "Research on Pole-to-Ground Fault Ride-Through Strategy for Hybrid Half-Wave Alternating MMC" Electronics 14, no. 14: 2893. https://doi.org/10.3390/electronics14142893
APA StyleDing, Y., Wang, Y., Gao, Y., Su, Z., Song, X., Wu, X., & Gu, Y. (2025). Research on Pole-to-Ground Fault Ride-Through Strategy for Hybrid Half-Wave Alternating MMC. Electronics, 14(14), 2893. https://doi.org/10.3390/electronics14142893