

Cross-Path Planning of UAV Cluster Low-Altitude Flight Based on Inertial Navigation Combined with GPS Localization
 , ,
, ,  ,
,
Abstract
1. Introduction
- (1)
- A cooperative positioning framework combining inertial navigation and GPS positioning is proposed, which effectively overcomes the problems of GPS signal obstruction and multipath effect in low-altitude environments and improves positioning reliability.
- (2)
- Based on the theory of spatial discretization, the occupation grid method is adopted to discretize the continuous flight space and construct a three-dimensional environmental representation model suitable for unmanned aerial vehicle (UAV) swarms.
- (3)
- Through the analysis of the dynamic changes of attitude angles in the three-dimensional Cartesian coordinate system, a flight state description system for the unmanned aerial vehicle swarm is established to provide a dynamic basis for path planning.
- (4)
- Combined with the Cramér–Rao lower limit theory, a cross-path optimization method for unmanned aerial vehicle (UAV) swarms is proposed to achieve efficient path planning in the cooperative flight state.
- (5)
- Design a status update mechanism that supports the collaboration of multiple unmanned aerial vehicles (UAVs) to provide a systematic solution for cluster flights in complex low-altitude environments.
2. Materials and Methods
2.1. Modeling of Low-Altitude Flight Environment for Drone Clusters
2.2. Analysis of UAV Cluster Flight State Dynamics
2.3. UAV Cluster Low-Altitude Flight Cross-Path Planning
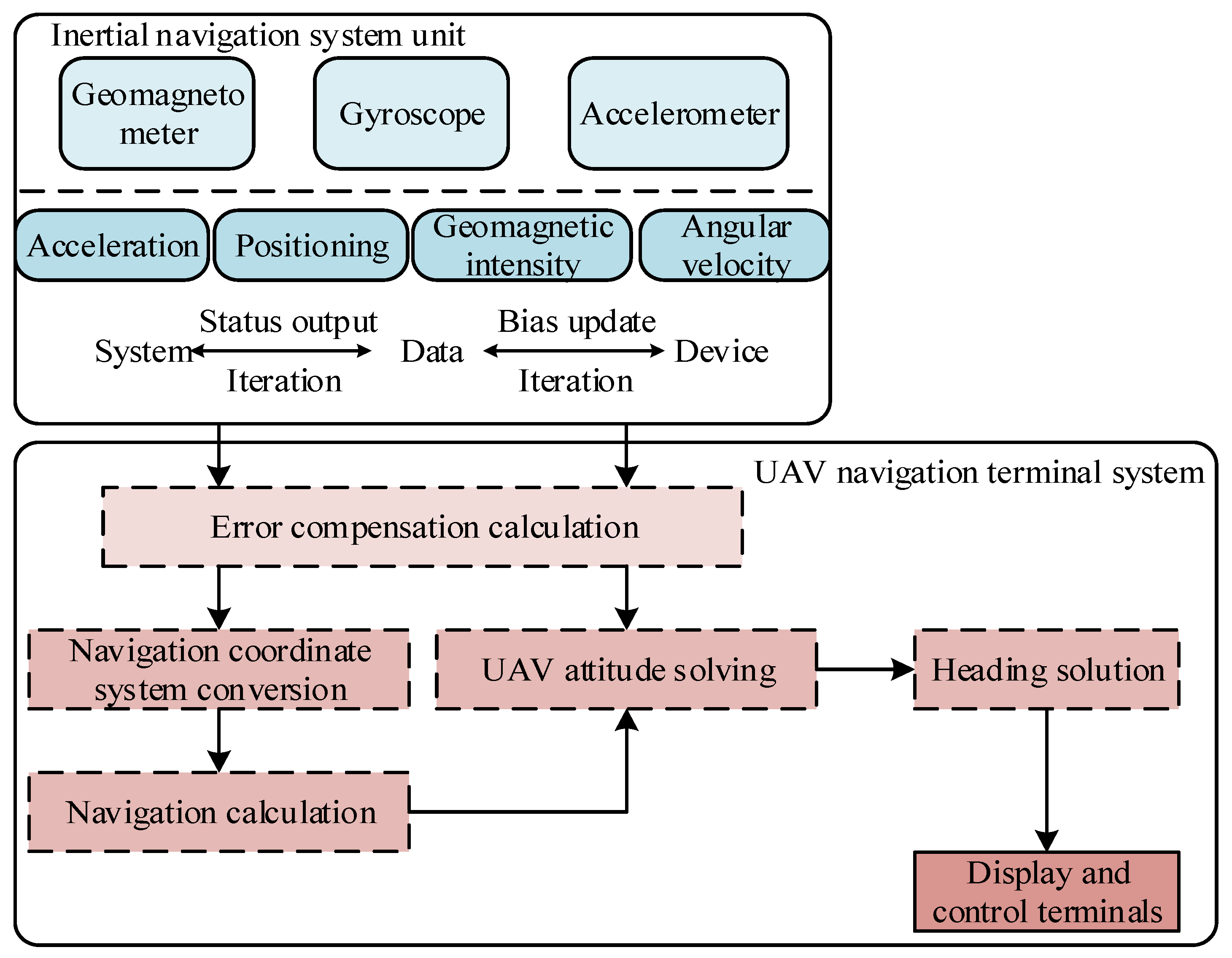
2.3.1. UAV Cluster Cooperative Flight State Update Based on Inertial Navigation
2.3.2. Global Target Point Localization for UAV Cluster Flights Combined with GPS Positioning
2.3.3. CRLB-Based Cross-Path Planning for UAV Clusters Flying at Low Altitude
3. Results
3.1. Experimental Environment Description
3.2. Multi-UAV Cooperative Flight Performance Test
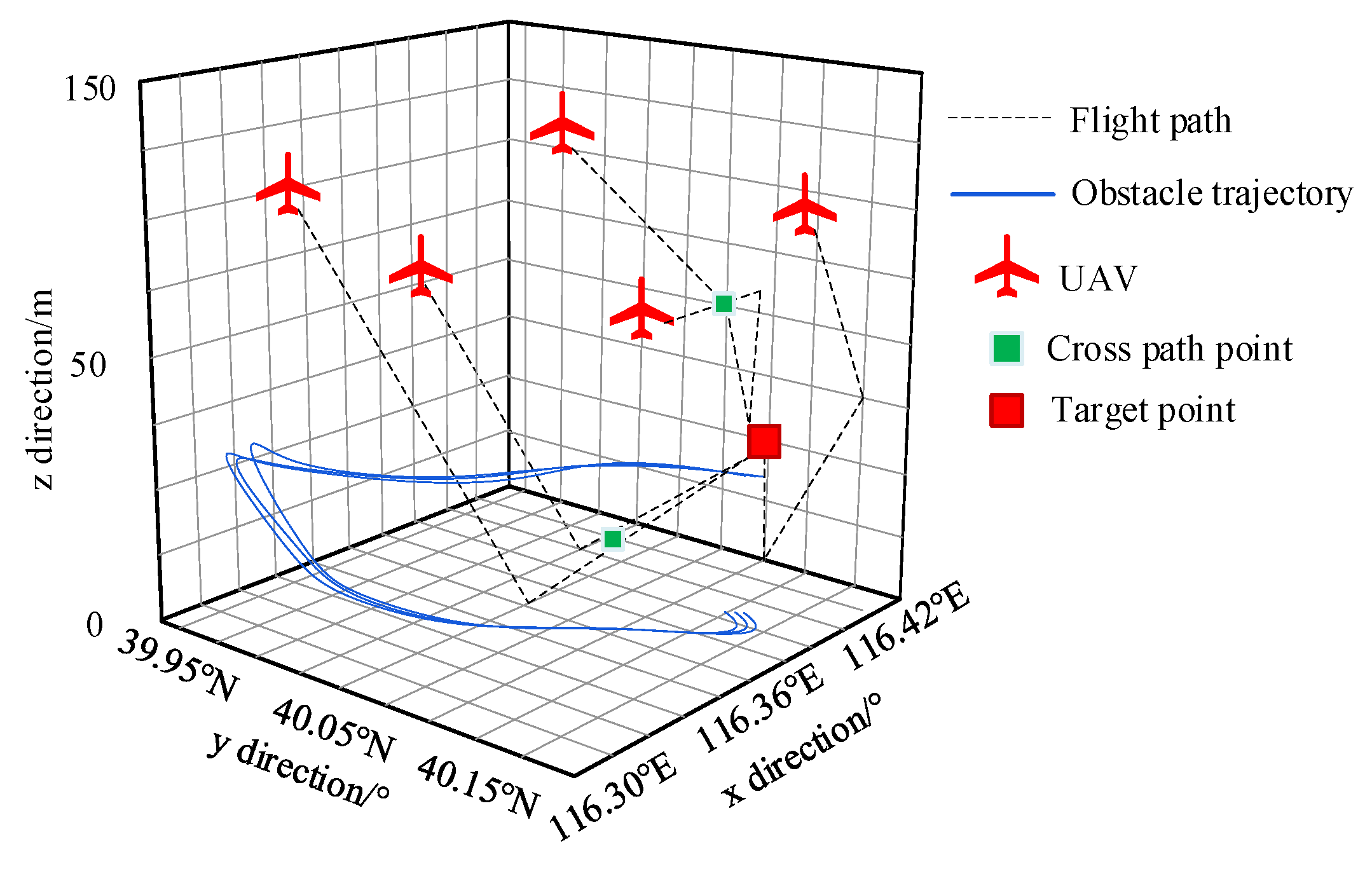
3.3. Testing the Effect of Low-Altitude Flight Cross-Path Planning
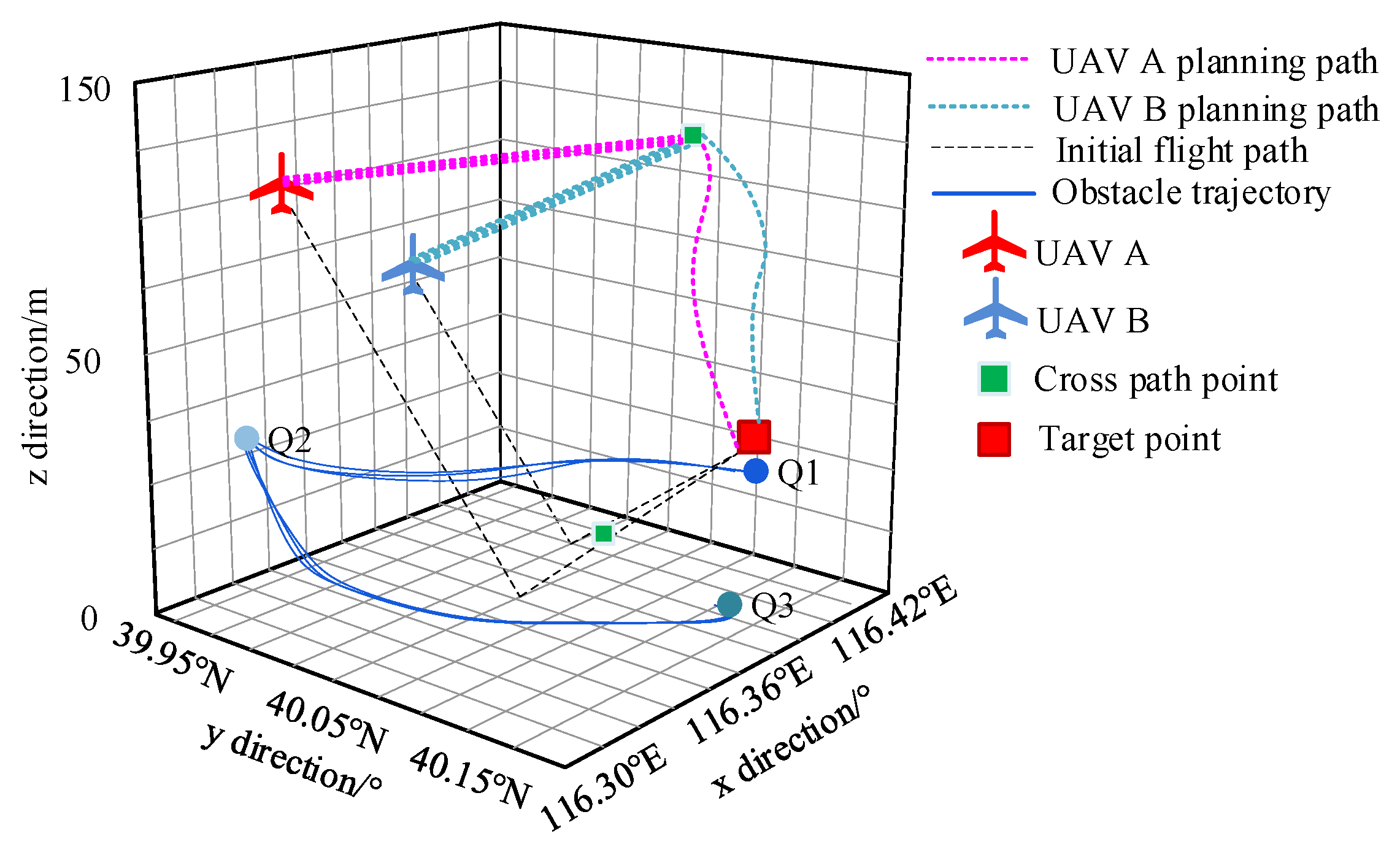
3.4. Comparative Test of UAV Low-Altitude Flight Cross-Path Planning Effect
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saadi, A.A.; Soukane, A.; Meraihi, Y.; Gabis, A.B.; Mirjalili, S.; Ramdane-Cherif, A. Uav path planning using optimization approaches: A survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Shi, Z.; Zuo, Z.; Dong, R. Low-altitude scaled similarity analysis and flight tests of near space airships with pressure resistance mechanism. Adv. Space Res. 2023, 72, 2324–2335. [Google Scholar] [CrossRef]
- Winkenbach, M.; Spinier, S.; Pachon, J.; Konduri, K. Introduction to the special issue on machine learning methods and applications in large-scale route planning problems. Transp. Sci. 2024, 58, 1–7. [Google Scholar] [CrossRef]
- Zhan, H.; Zhang, Y.; Huang, J.; Song, Y.; Xing, L.; Wu, J.; Gao, Z. A reinforcement learning-based evolutionary algorithm for the unmanned aerial vehicles maritime search and rescue path planning problem considering multiple rescue centers. Memetic Comput. 2024, 16, 373–386. [Google Scholar] [CrossRef]
- Roncolini, F.; Galante, G.; Quaranta, G.; Masarati, P. Constrained path planning for manned–unmanned rotorcraft teaming in emergency medical service missions. CEAS Aeronaut. J. 2024, 15, 619–641. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, L.; Cai, B.; Liang, Y. Unified path planning for composite UAVs via Fermat point-based grouping particle swarm optimization. Aerosp. Sci. Technol. 2024, 148, 109088. [Google Scholar] [CrossRef]
- Yaqoob, A.; Yuan, Z.; Muntean, G.-M. A UAV-Centric Improved Soft Actor-Critic Algorithm for QoE-Focused Aerial Video Streaming. IEEE Trans. Veh. Technol. 2024, 73, 13498–13512. [Google Scholar] [CrossRef]
- Sabuwala, N.A.; Daruwala, R.D. An approach to enhance the security of unmanned aerial vehicles (UAVs). J. Supercomput. 2024, 80, 9609–9639. [Google Scholar] [CrossRef]
- Yao, P.; Yang, G.; Peng, X.; Peng, J. An Initial Alignment Algorithm Based on RSKF Single-Axis Rotational Inertial Navigation System. IEEE Sens. J. 2024, 24, 30749–30757. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, X.-X.; Zheng, M.-Y.; Zhan, Z.-H. Evolutionary computation for unmanned aerial vehicle path planning: A survey. Artif. Intell. Rev. 2024, 57, 267. [Google Scholar] [CrossRef]
- Rhudy, M.B.; Fravolini, M.L.; Napolitano, M.R. GPS-free roll and pitch estimation through pressure altitude aided inertial navigation system for a jet aircraft. Aerosp. Sci. Technol. 2024, 146, 108975. [Google Scholar] [CrossRef]
- Kim, N.; Macciotta, R.; Jun, B. Time series analysis of slope displacements using uav photogrammetry and its relationship with rainfall intensity. Landslides 2024, 21, 1673–1689. [Google Scholar] [CrossRef]
- Meng, Q.; Qian, C.; Sun, Z.Y.; Zhao, S. Autonomous parking method based on improved A* algorithm and model predictive control: Autonomous parking method. Nonlinear Dyn. 2025, 113, 6839–6862. [Google Scholar] [CrossRef]
- Sabzekar, S.; Samadzad, M.; Mehditabrizi, A.; Tak, A.N. A Deep Reinforcement Learning Approach for UAV Path Planning Incorporating Vehicle Dynamics with Acceleration Control. Unmanned Syst. 2024, 12, 477–498. [Google Scholar] [CrossRef]
- Bo, L.; Wang, S.; Ge, C.; Fan, Q.; Temuer, C. Bi-level intelligent dynamic path planning for an UAV in low-altitude complex urban environment. Trans. Inst. Meas. Control 2024, 46, 39–57. [Google Scholar]
- Wang, S.; Zhu, D.; Zhou, C.; Sun, G. Improved grey wolf algorithm based on dynamic weight and logistic mapping for safe path planning of UAV low-altitude penetration. J. Supercomput. 2024, 80, 25818–25852. [Google Scholar] [CrossRef]
- Ye, Z.; Li, H.; Wei, W. Improved particle swarm optimization based on multi-strategy fusion for UAV path planning. Int. J. Intell. Comput. Cybern. 2024, 17, 213–235. [Google Scholar] [CrossRef]
- Cheng, L.; Ling, G.; Liu, F.; Ge, M.-F. Application of uniform experimental design theory to multi-strategy improved sparrow search algorithm for UAV path planning. Expert Syst. Appl. 2024, 255, 124849. [Google Scholar] [CrossRef]
- Cao, Q.; Kang, W.; Ma, R.; Liu, G.; Chang, L. DDQN path planning for unmanned aerial underwater vehicle (UAUV) in underwater acoustic sensor network. Wirel. Netw. 2024, 30, 5655–5667. [Google Scholar] [CrossRef]
- Beishenalieva, A.; Yoo, S.-J. UAV Path Planning for Data Gathering in Wireless Sensor Networks: Spatial and Temporal Substate-Based Q-Learning. IEEE Internet Things J. 2024, 11, 9572–9586. [Google Scholar] [CrossRef]
- He, Q.; He, G.; Yang, H.; Chen, S.; Wang, J.; Liu, S. In-Motion Rapid and Robust Heading Alignment of Low-Cost Inertial Measurement Units Using Position Loci for Indoor Navigation. IEEE Sens. J. 2024, 24, 19454–19465. [Google Scholar] [CrossRef]
- Hashim, H.A.; Eltoukhy, A.E.E.; Vamvoudakis, K.G. UWB Ranging and IMU Data Fusion: Overview and Nonlinear Stochastic Filter for Inertial Navigation. IEEE Trans. Intell. Transp. Syst. 2024, 25, 359–369. [Google Scholar] [CrossRef]
- Fornasier, A.; van Goor, P.; Allak, E.; Mahony, R.; Weiss, S. MSCEqF: A Multi State Constraint Equivariant Filter for Vision-Aided Inertial Navigation. IEEE Robot. Autom. Lett. 2024, 9, 731–738. [Google Scholar] [CrossRef]
- Ji, M.; Ren, G.; Zhang, H.; Ren, R. Collaborative positioning for emergency rescuers based on INS, GPS and ZigBee. Phys. Scr. 2024, 99, 065530. [Google Scholar] [CrossRef]
- Knight, J.; Burningham, H.; Griffiths, D.; Yao, Y. Coastal boulder movement on a rocky shoreline in northwest ireland from repeat uav surveys using structure from motion photogrammetry. Geomorphology 2023, 440, 108883. [Google Scholar] [CrossRef]
- Rahman, M.F.A.; Din, A.H.M.; Hamden, M.H.; Mahmud, M.R.; Rasib, A.W. Developing a near-seamless tidal datum by integrating tidal and satellite altimetry data with a Digital Elevation Model for maritime boundary delimitation. Int. J. Remote Sens. 2024, 45, 8827–8858. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Category | Parameter | Numerical Description |
|---|---|---|
| Simulation parameters | Standard deviation of pseudo-range measurement error | 1.5 m |
| Doppler velocity measurement error | 0.14 m/s | |
| Lower limit of CRLB position error | 1.2 m (horizontal), 2.0 m (vertical) | |
| Zero bias of accelerometer | 0.012 m/s | |
| Inertial error accumulation rate | 0.01 m/s | |
| Conflict detection threshold | 3 s, conflict probability < 1% | |
| Safe distance for cooperative flight of drones | 2.3 m | |
| Performance parameters of unmanned aerial vehicles | main camera | 48 million pixels |
| Maximum payload | 50 g | |
| Battery capacity | 18.96/(W·h) | |
| Max flight time | 45 min | |
| Weight | 249 g |
| Sailing Speed m/s | Sailing Time Difference/s | UAV Synergy Distance/m |
|---|---|---|
| 15 | 0.31 | 1.62 |
| 18 | 0.28 | 2.45 |
| 21 | 0.03 | 3.61 |
| 24 | 0.49 | 2.04 |
| 27 | 0.05 | 2.51 |
| 30 | 0.19 | 1.92 |
| 33 | 0.01 | 1.08 |
| 35 | 0.00 | 1.75 |
| Planning Methods | Planned Runtime/s | Target Achievement Success Rate/% | Number of Times the Fitness of the Planned Path Is Reduced/Time | Collaborative Collision Avoidance Efficiency/% |
|---|---|---|---|---|
| Design method | 4.36 | 98.35 | 100 | 95.39 |
| Literature [16] method | 7.52 | 91.76 | 46 | 89.68 |
| Literature [17] method | 6.68 | 90.54 | 71 | 85.49 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhang, M.; Yan, P.; Wang, Q.; Xie, D.; Bai, Y.B. Cross-Path Planning of UAV Cluster Low-Altitude Flight Based on Inertial Navigation Combined with GPS Localization. Electronics 2025, 14, 2877. https://doi.org/10.3390/electronics14142877
Yang X, Zhang M, Yan P, Wang Q, Xie D, Bai YB. Cross-Path Planning of UAV Cluster Low-Altitude Flight Based on Inertial Navigation Combined with GPS Localization. Electronics. 2025; 14(14):2877. https://doi.org/10.3390/electronics14142877
Chicago/Turabian StyleYang, Xiancheng, Ming Zhang, Peihui Yan, Qu Wang, Dongpeng Xie, and Yuntian Brian Bai. 2025. "Cross-Path Planning of UAV Cluster Low-Altitude Flight Based on Inertial Navigation Combined with GPS Localization" Electronics 14, no. 14: 2877. https://doi.org/10.3390/electronics14142877
APA StyleYang, X., Zhang, M., Yan, P., Wang, Q., Xie, D., & Bai, Y. B. (2025). Cross-Path Planning of UAV Cluster Low-Altitude Flight Based on Inertial Navigation Combined with GPS Localization. Electronics, 14(14), 2877. https://doi.org/10.3390/electronics14142877