
Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators

 ,
,  ,
,  ,
, 
Abstract
1. Introduction
- A novel wave variable compensator-based design is proposed for three-channel (3CH) bilateral teleoperation systems that ensures both delay-compensated stability and high transparency.
- A two-step controller design framework is established, which first reformulates the 3CH system into a passive two-port network and then designs the wave variable compensators, together with energy reservoirs, to ensure passivity under communication delay.
- The effectiveness of the proposed method is validated through structured numerical comparisons against the conventional wave variable approach [31] using quantitative metrics including Root Mean Square Error (RMSE), Mean Absolute Error (MAE), Dynamic Time Warping (DTW), and the Mann–Whitney U test.
- The proposed framework is theoretically extendable to other three-channel teleoperation configurations, offering a scalable and modular foundation for future developments in transparent and stable teleoperation under communication delay.
2. Fundamentals of Bilateral Teleoperation System with Time Delay
2.1. 4CH Teleoperation System with Time Delay
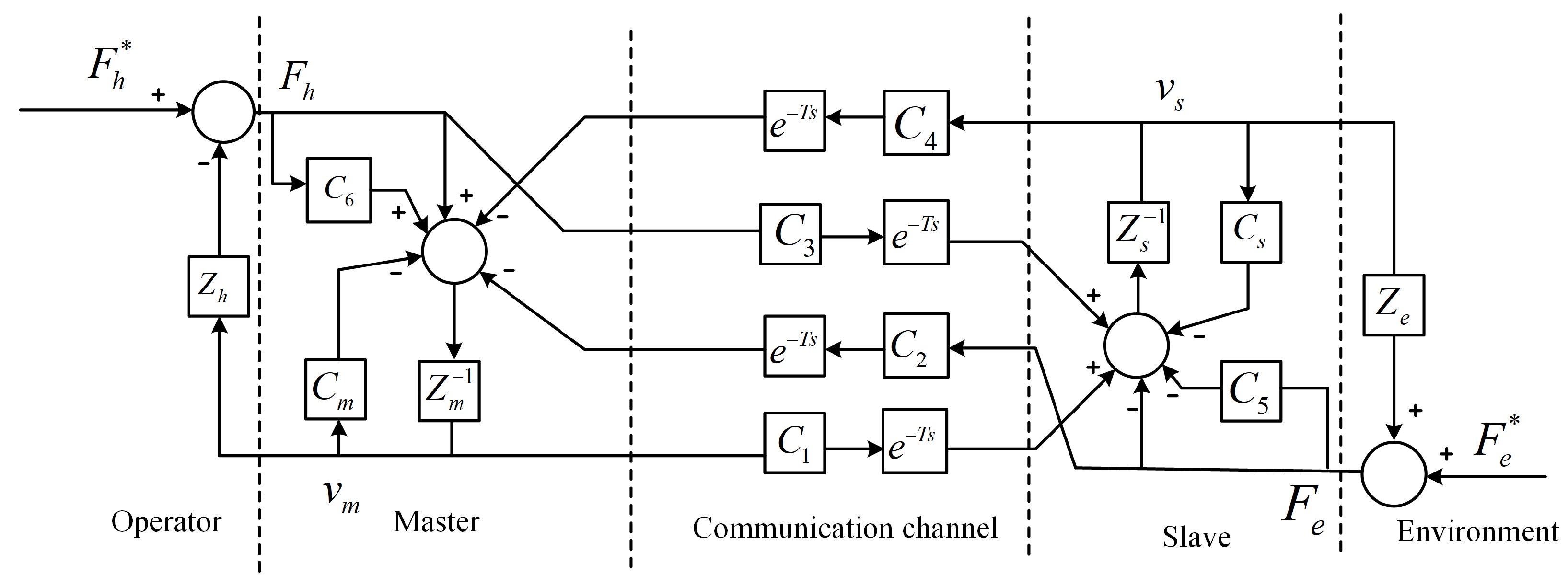
2.2. 3CH Teleoperation System with Time Delay
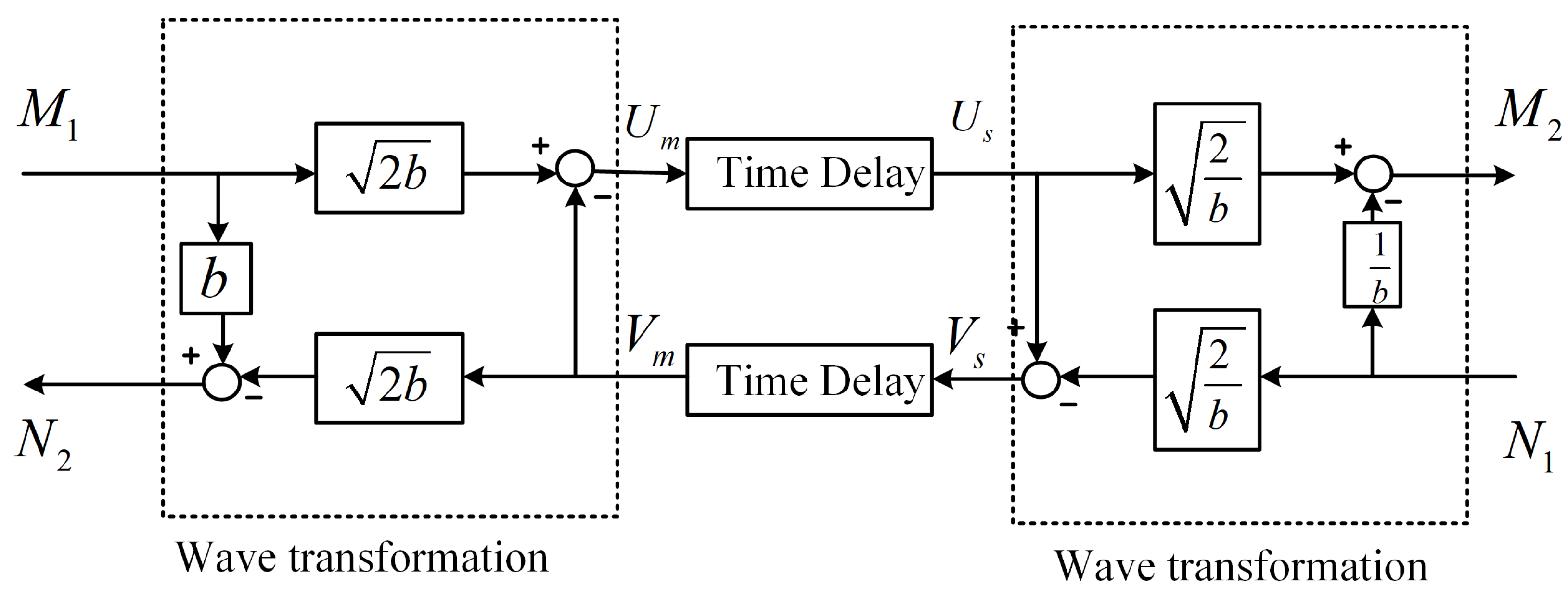
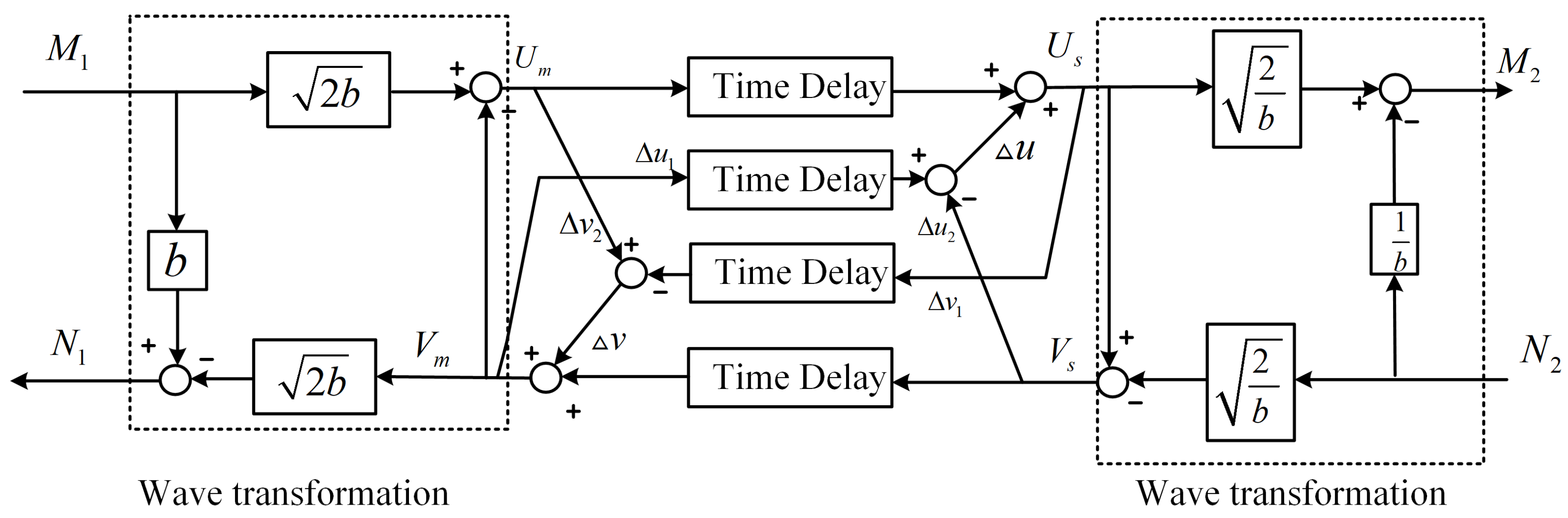
2.3. Wave Variable Transformation Method
3. Wave Variable Compensator-Based 3CH Teleoperation System
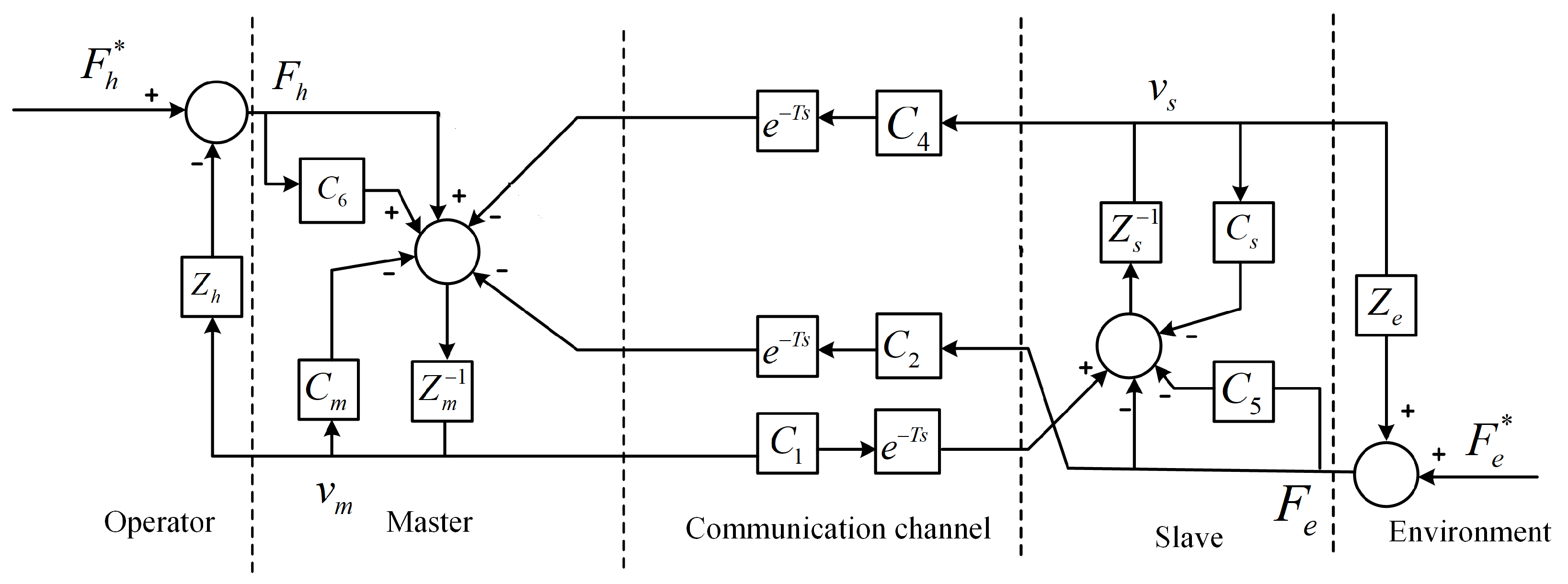
3.1. Reformulation of the P-PF 3CH Teleoperation Structure
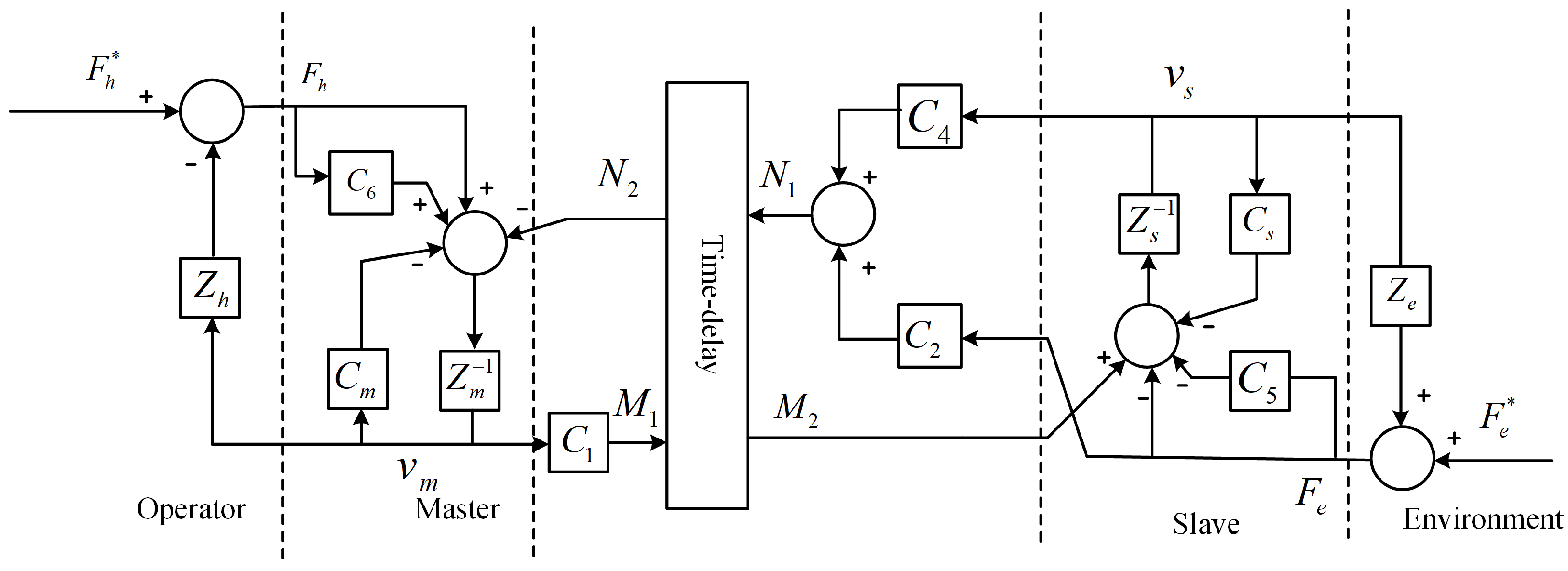
3.2. Wave Variable Compensator Approach to 3CH Teleoperation
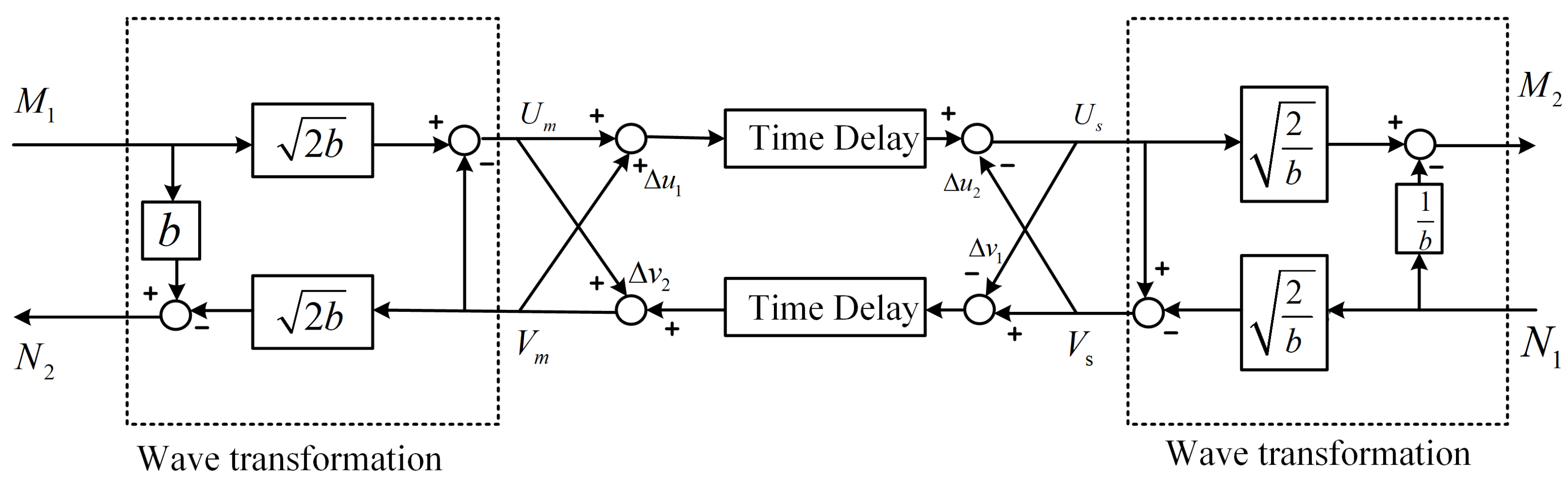
3.2.1. Wave Variable Compensator Design
3.2.2. Transparency Analysis
3.3. Controller Design Procedure Summary
4. Numerical Studies
4.1. System Setup
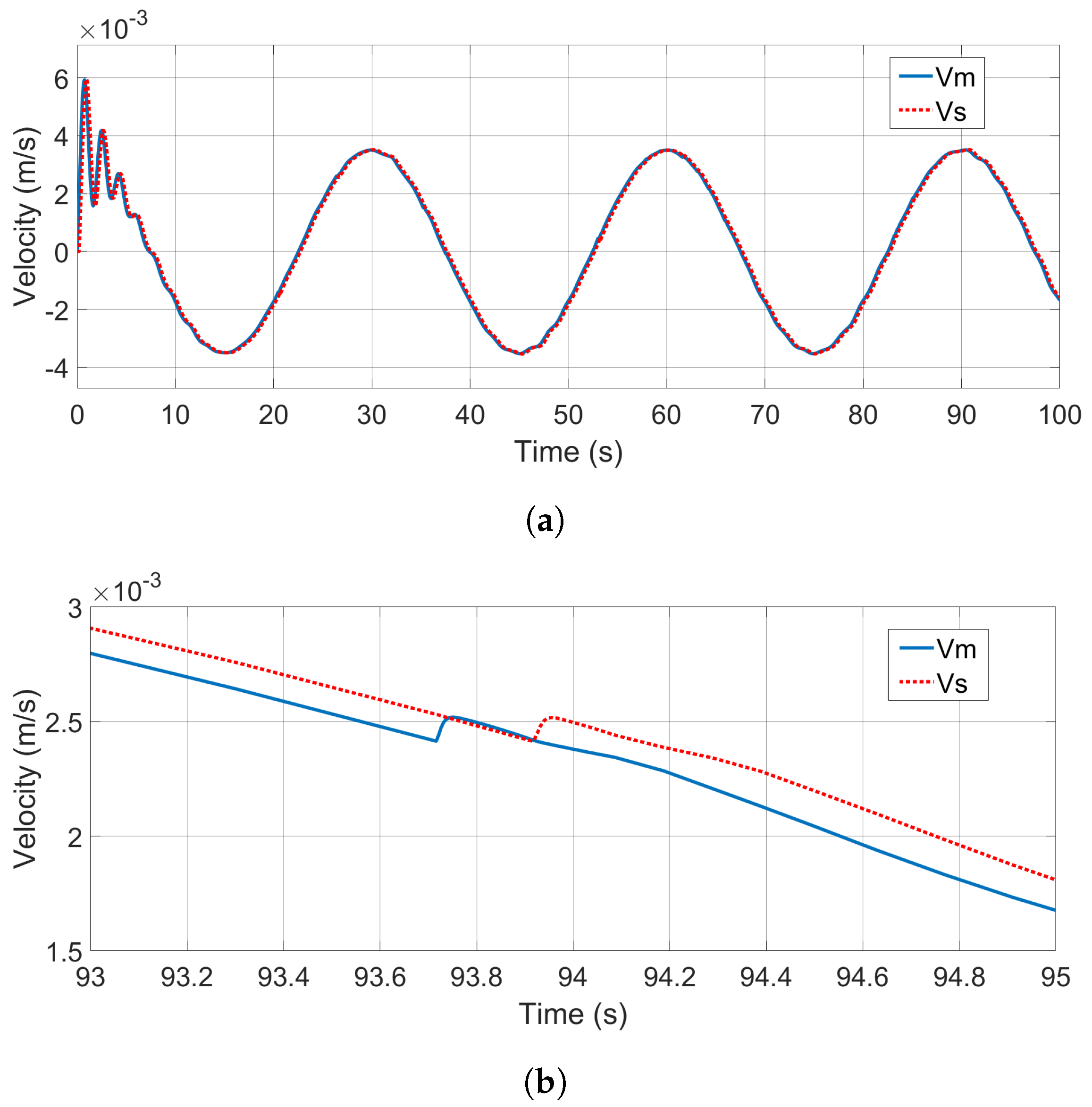
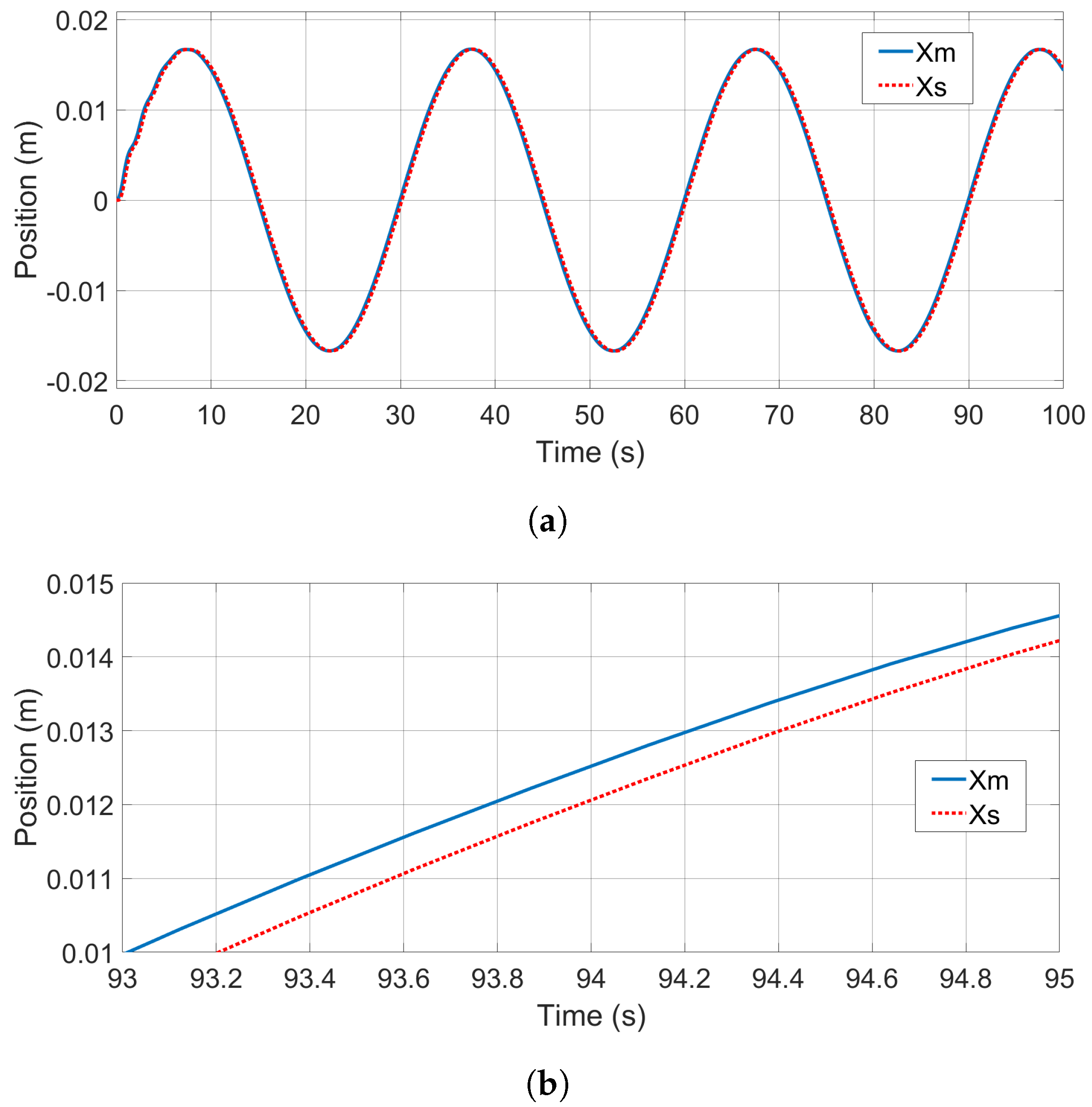
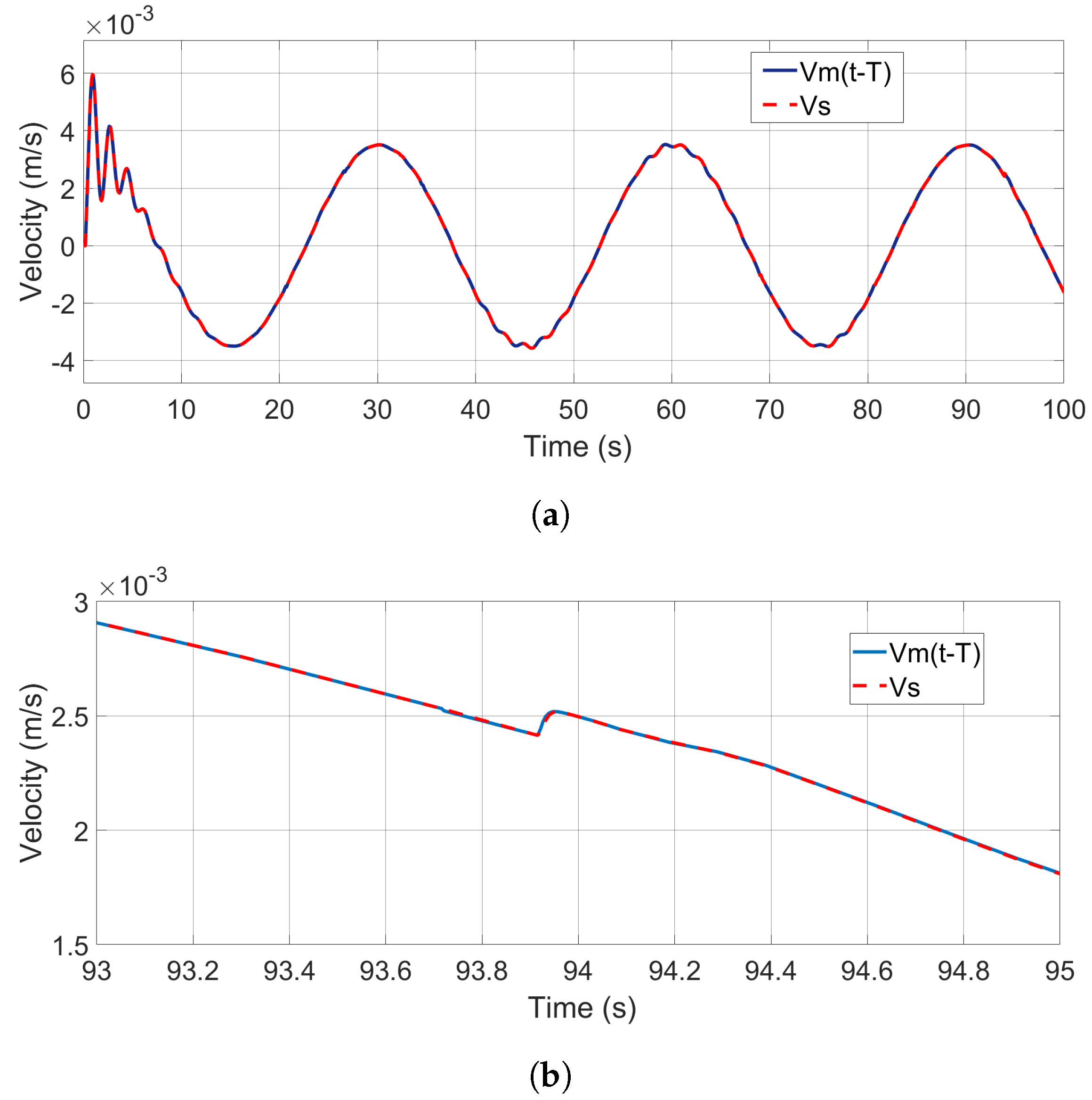
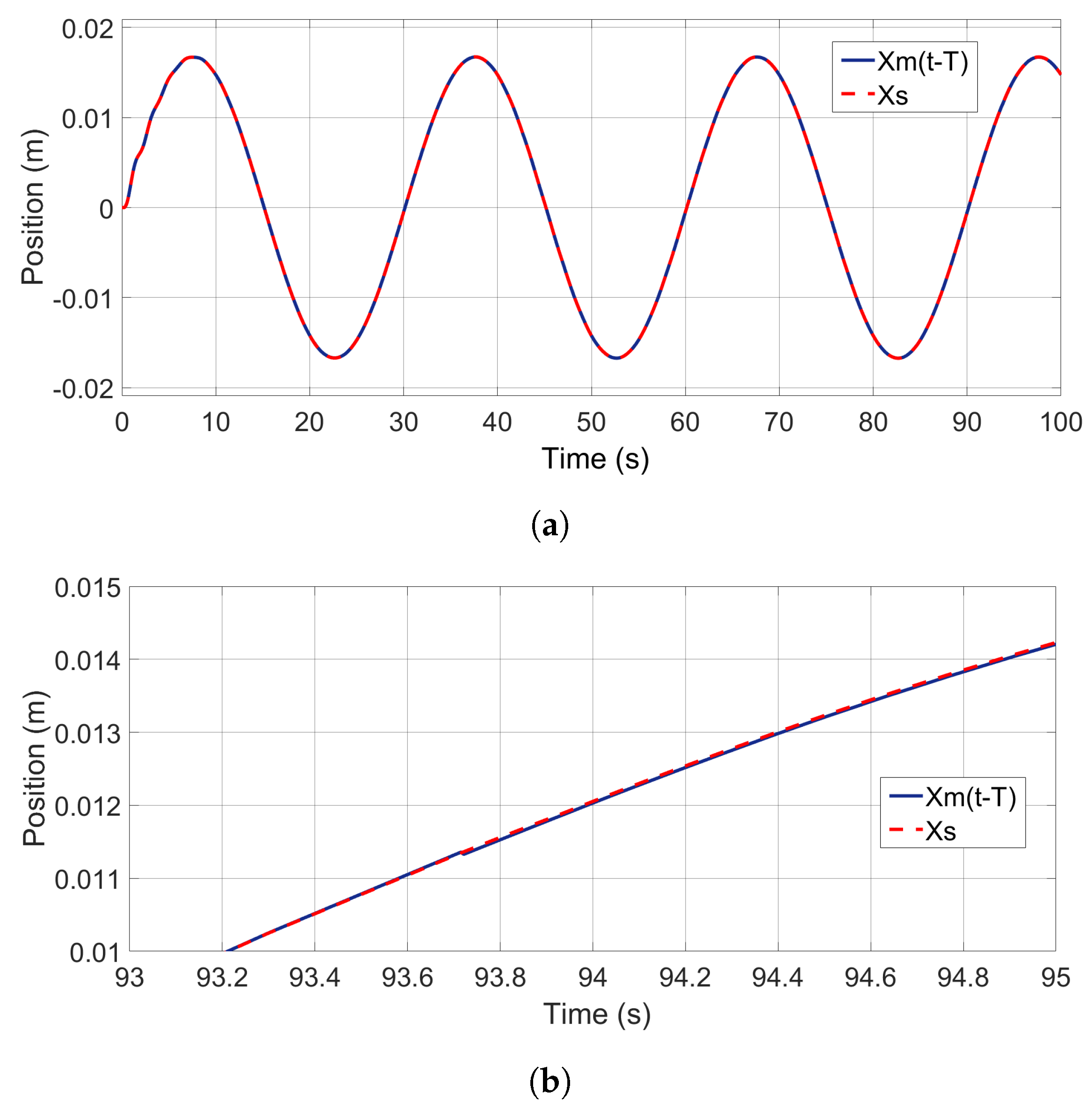
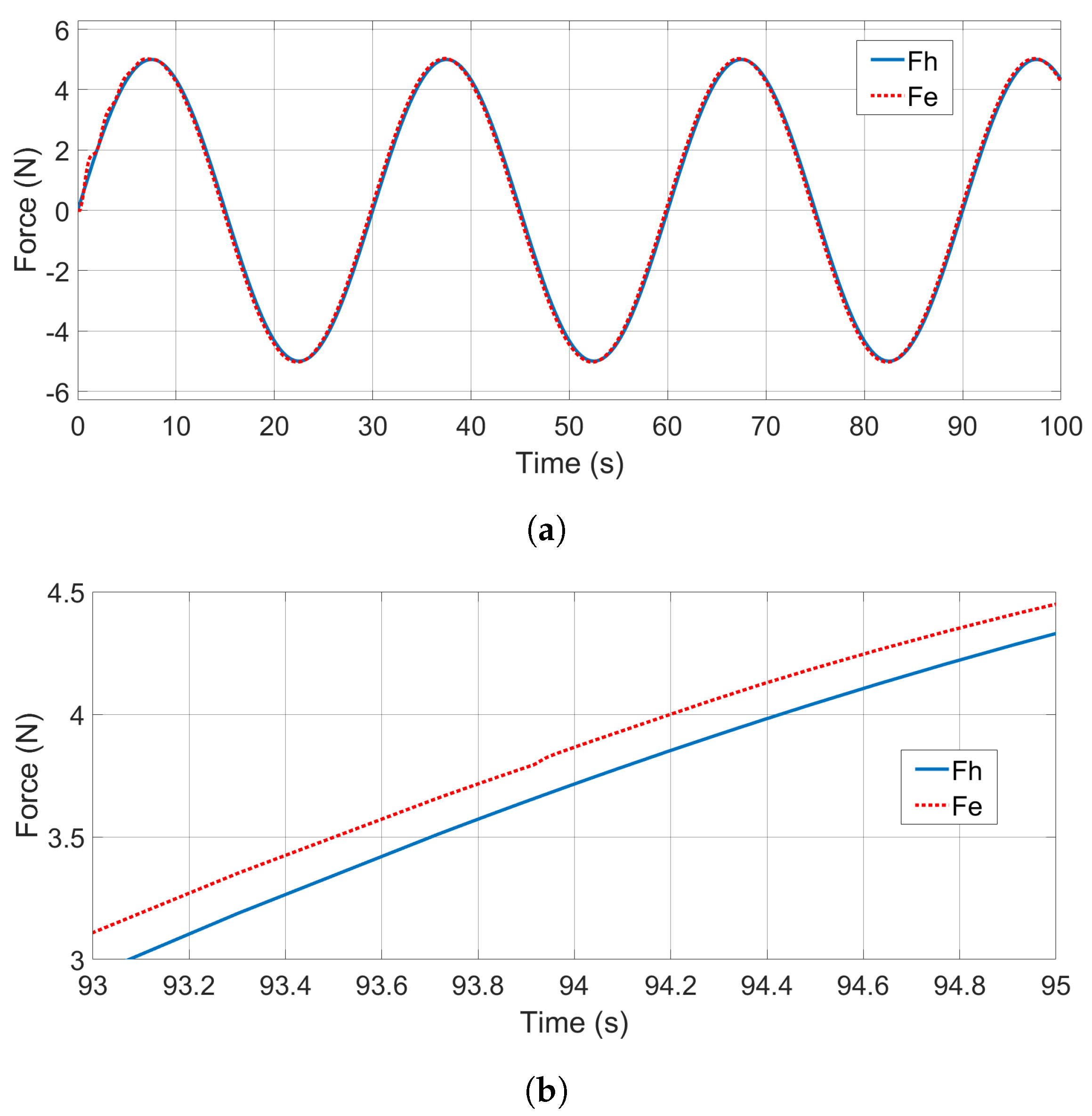
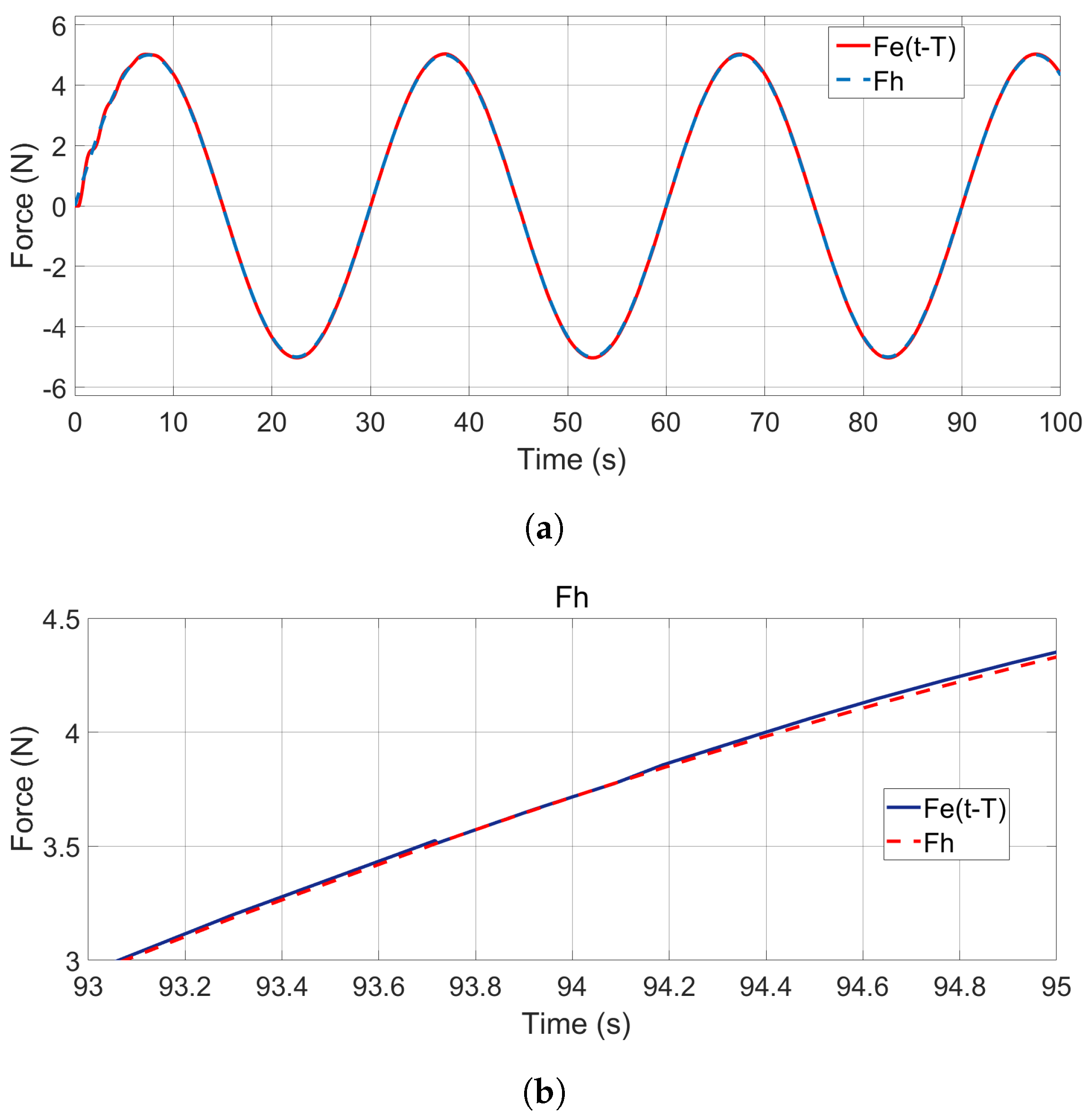
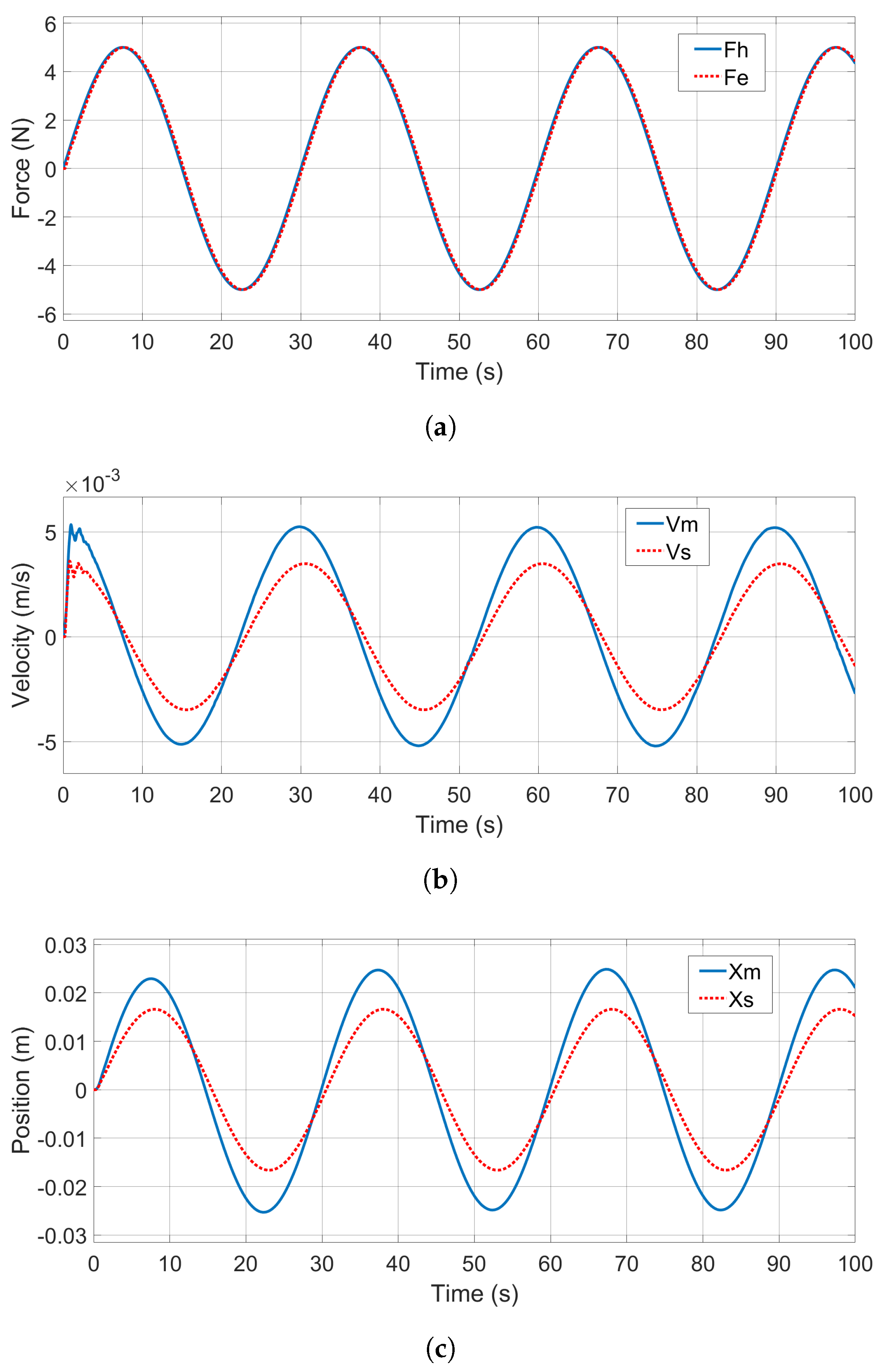
4.2. Results of Wave Variable Compensator-Based 3CH Teleoperation
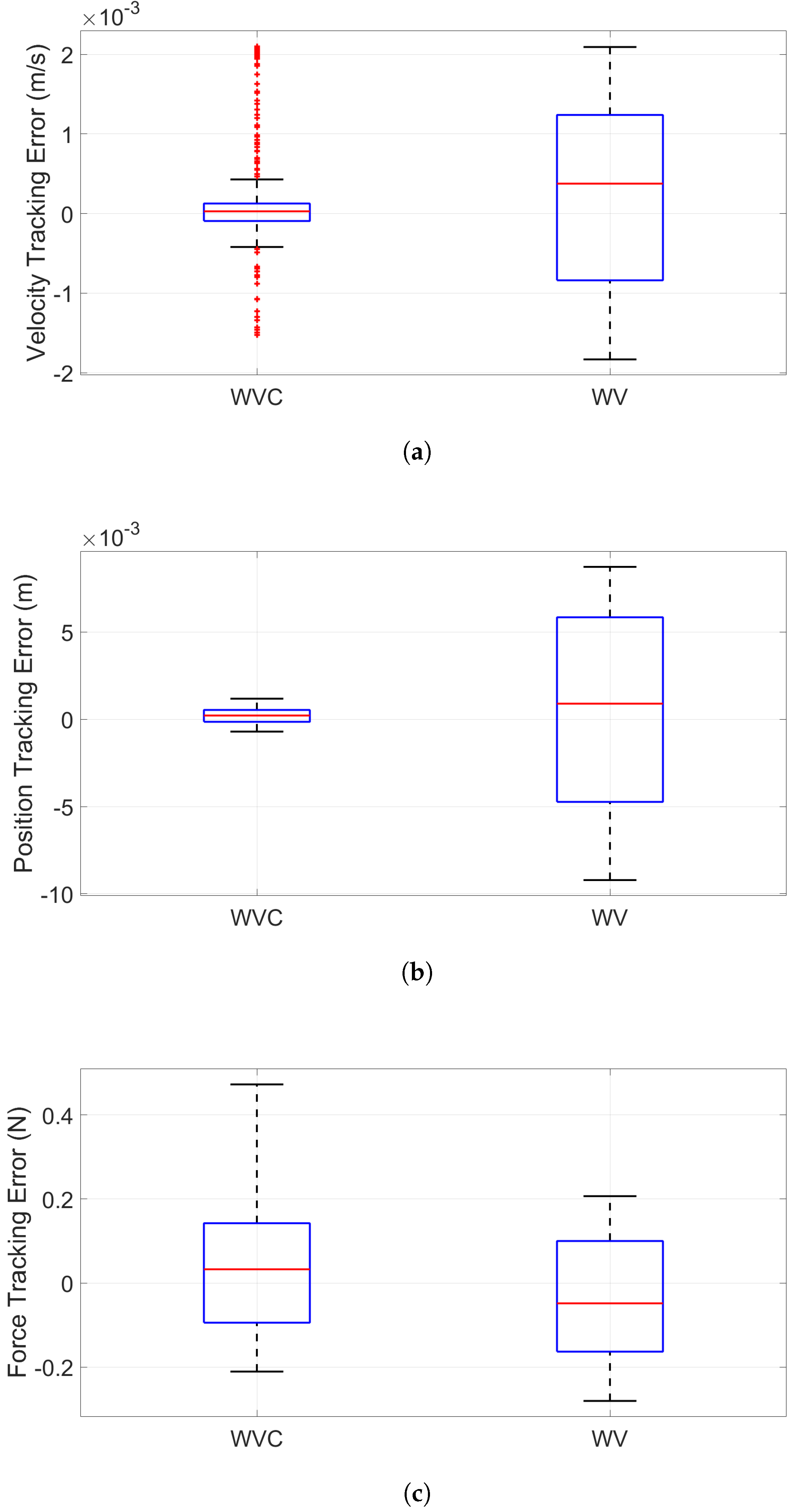
4.3. Results of Comparative Studies
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Goertz, R.C. Master-Slave Manipulator; Argonne National Laboratory: Lemont, IL, USA, 1949; Volume 2635. [Google Scholar]
- Nakjima, Y.; Nozaki, T.; Ohnishi, K. Heartbeat synchronization with haptic feedback for telesurgical robot. IEEE Trans. Ind. Electron. 2014, 61, 3753–3764. [Google Scholar] [CrossRef]
- Wen, H.; Cong, M. Kinematic model and analysis of an actuation redundant parallel robot with higher kinematic pairs for jaw movement. IEEE Trans. Ind. Electron. 2015, 62, 1590–1598. [Google Scholar] [CrossRef]
- Deng, Z.; Stommel, M.; Xu, W. A novel soft machine table for manipulation of delicate objects inspired by caterpillar locomotion. IEEE/ASME Trans. Mechatronics 2016, 21, 1702–1710. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, X.; Shi, Y.; Zhang, Y.; Xiao, J. Six degree-offreedom haptic simulation of a stringed musical instrument for triggering sounds. IEEE Trans. Haptics 2017, 10, 265–275. [Google Scholar] [CrossRef] [PubMed]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef]
- Anderson, R.J.; Spong, M.W. Bilateral control of teleoperators with time delay. IEEE Trans. Autom. Control 1989, 34, 494–501. [Google Scholar] [CrossRef]
- Niemeyer, G.; Slotine, J.J.E. Stable adaptive teleoperation. IEEE J. Ocean. Eng. 1991, 16, 152–162. [Google Scholar] [CrossRef]
- Alise, M.; Roberts, R.G.; Repperger, D.W.; Moore, C.A.; Tosunoglu, S. On Extending the Wave Variable Method to Multiple-DOF Teleoperation Systems. IEEE/ASME Trans. Mechatron. 2009, 14, 55–63. [Google Scholar] [CrossRef]
- Polushin, I. A Generalized Scattering Framework for Teleoperation with Communication Delays. IFAC-PapersOnLine 2020, 53, 10064–10069. [Google Scholar] [CrossRef]
- Najafabadi, A.M.; Ataei, M.; Motaharifar, M. Disturbance Observer Based Synchronization Controtl for Passive Bilateral Teleoperation Systems with Time Delays. In Proceedings of the 10th RSI International Conference on Robotics and Mechatronics, Tehran, Iran, 15–18 November 2022; pp. 610–615. [Google Scholar]
- Ghavifekr, A.A.; Ghiasi, A.R.; Badamchizadeh, M.A. Discrete-time control of bilateral teleoperation systems: A review. Robotica 2018, 36, 552–569. [Google Scholar] [CrossRef]
- Yoo, S.G.; Chong, K.T. Adaptive wave variables for bilateral teleoperation using neural networks. Neural Comput. Appl. 2014, 25, 1249–1262. [Google Scholar] [CrossRef]
- Jafari, B.H.; Spong, M.W. Passivity-based switching control in teleoperation systems with time-varying communication delay. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 5469–5475. [Google Scholar]
- Hader, A.; El-Kasri, C.; Tissir, E.; Alfidi, M. Improved Stability and Performance Criteria for Teleoperation Delay-Dependent Systems: SSG and Input–output Approaches. Circuits Syst. Signal Process. 2023, 42, 5187–5206. [Google Scholar] [CrossRef]
- Chan, L.; Liu, Y.; Huang, Q.; Wang, P. Robust Adaptive Observer-Based Predictive Control for a Non-Linear Delayed Bilateral Teleoperation System. IEEE Access 2022, 10, 52294–52305. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Yang, C.-Y.; Lin, H.-W. Robust Adaptive-Sliding-Mode Control for Teleoperation Systems with Time-Varying Delays and Uncertainties. Robotics 2024, 13, 89. [Google Scholar] [CrossRef]
- Zhou, X.; Bai, W.; Ren, Y.; Yang, Z.; Wang, Z.; Lo, B.; Yeatman, E.M. An LSTM-based Bilateral Active Estimation Model for Robotic Teleoperation with Varying Time Delay. In Proceedings of the International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 725–730. [Google Scholar]
- Zhang, S.; Yuan, S.; Yu, X.; Kong, L.; Li, Q.; Li, G. Adaptive Neural Network Fixed-Time Control Design for Bilateral Teleoperation with Time Delay. IEEE Trans. Cybern. 2022, 52, 9756–9769. [Google Scholar] [CrossRef] [PubMed]
- Dao, P.N.; Nguyen, V.Q.; Duc, H.A.N. Nonlinear RISE based integral reinforcement learning algorithms for perturbed Bilateral Teleoperators with variable time delay. Neurocomputing 2024, 605, 128355. [Google Scholar] [CrossRef]
- Dao, P.N.; Nguyen, Q.P.; Vu, M.H. Adaptive optimal coordination control of perturbed Bilateral Teleoperators with variable time delays using Actor–Critic Reinforcement Learning algorithm. Math. Comput. Simul. 2025, 229, 151–175. [Google Scholar] [CrossRef]
- Coelho, A.; Singh, H.; Muskardin, T.; Balachandran, R.; Kondak, K. Smoother Position-Drift Compensation for Time Domain Passivity Approach Based Teleoperation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 5525–5532. [Google Scholar]
- Yalcin, B.; Ohnishi, K. Stable and Transparent Time-Delayed Teleoperation by Direct Acceleration Waves. IEEE Trans. Ind. Electron. 2010, 57, 3228–3238. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, F.; Sun, W.; Yang, C.; Song, W.; Wang, T.; Zhu, S. A novel wave variable based bilateral teleoperation control design for transparency improvement. In Proceedings of the IEEE International Conference on Information and Automation, Wuyishan, China, 11–13 August 2018; pp. 1–6. [Google Scholar]
- Balachandran, R. Transparency Enhancement in Teleoperation. In A Stable and Transparent Framework for Adaptive Shared Control of Robots; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2024; Volume 158. [Google Scholar]
- Hashtrudi-Zaad, K.; Salcudean, S.E. Transparency in time-delayed systems and the effect of local force feedback for transparent teleoperation. IEEE Trans. Robot. Autom. 2002, 18, 108–114. [Google Scholar] [CrossRef]
- Uyulan, C. Robust passivity-based nonlinear controller design for bilateral teleoperation system under variable time delay and variable load disturbance. Nonlinear Eng. 2024, 13, 20220358. [Google Scholar] [CrossRef]
- Farajiparvar, P.; Mahjoob, M.; Towhidkhah, F.; Shoham, M. A brief survey of telerobotic time delay mitigation. Front. Robot. AI 2020, 7, 577768. [Google Scholar] [CrossRef] [PubMed]
- Risiglione, M.; Sleiman, J.-P.; Minniti, M.V.; Çizmeci, B.; Dresscher, D.; Hutter, M. Passivity-based control for haptic teleoperation of a legged manipulator in presence of time-delays. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5276–5281. [Google Scholar]
- Albakri, A.; Liu, C.; Poignet, P. Stability and performance analysis of three-channel teleoperation control architectures for medical applications. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Aziminejad, A.; Tavakoli, M.; Patel, R.V.; Moallem, M. Transparent time-delayed bilateral teleoperation using wave variables. IEEE Trans. Control Syst. Technol. 2008, 16, 548–555. [Google Scholar] [CrossRef]
- Guo, J.; Liu, C.; Poignet, P. Scaled position-force tracking for wireless teleoperation of miniaturized surgical robotic system. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 361–365. [Google Scholar]
- Lam, T.M.; Mulder, M.; van Paassen, M.M. Haptic Feedback in Uninhabited Aerial Vehicle Teleoperation with Time Delay. J. Guid. Control Dyn. 2008, 31, 1728–1739. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Payandeh, S. A delay prediction approach for teleoperation over the Internet. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 2178–2183. [Google Scholar]
- Chen, Y.; Hunter, I.W. Nonlinear stochastic system identification of skin using Volterra kernels. Ann. Biomed. Eng. 2013, 41, 847–862. [Google Scholar] [CrossRef]
- Parker, M.D.; Jones, L.A.; Hunter, I.W.; Taberner, A.J.; Nash, N.P.; Nielsen, P.M. Multidirectional In Vivo Characterization of Skin Using Wiener Nonlinear Stochastic System Identification Techniques. J. Biomech. Eng. 2017, 139, 011002. [Google Scholar] [CrossRef] [PubMed]
- Yokokohji, Y.; Yoshikawa, T. Bilateral control of master-slave manipulators for ideal kinesthetic coupling. IEEE Trans. Robot. Autom. 1994, 10, 605–620. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Description |
|---|---|
| 3CH | Three-Channel Teleoperation |
| 4CH | Four-Channel Teleoperation |
| 2CH | Two-Channel Teleoperation |
| P–PF | Position–Position Force control structure |
| F–PF | Force–Position Force control structure |
| PF–P | Position Force–Position control structure |
| PF–F | Position Force–Force control structure |
| WVC | Wave Variable Compensator |
| WV | Wave Variable |
| HIL | Hardware-in-the-Loop |
| RMSE | Root Mean Square Error |
| MAE | Mean Absolute Error |
| DTW | Dynamic Time Warping |
| DOF | Degree of Freedom |
| OR | Operating Room |
| PRC | Passive Reference Coupling |
| RL | Reinforcement Learning |
| LSTM | Long Short-Term Memory |
| BAEM | Bilateral Active Estimation Model |
| RBFNNs | Radial Basis Function Neural Networks |
| PID | Proportional–Integral–Derivative controller |
| Step | Description | Key Equations |
|---|---|---|
| 1 | Select 3CH configuration (e.g., P–PF) and define master/slave signals | Based on system setup (Section 2) |
| 2 | Reformulate system as two-port network using exchanged velocity and force signals | Equations (10)–(12) |
| 3 | Apply wave variable transformation to encode transmitted signals | Equation (13) |
| 4 | Design wave variable compensator using delayed local variables | Equations (17)–(21) |
| 5 | Define energy reservoir functions to accumulate compensation-induced energy | Equation (22) |
| 6 | Modulate compensator terms using reservoir-dependent exponential scaling | Equation (24) |
| 7 | Analyze system transparency under delay and assess tracking quality | Equations (25)–(27) |
| Parameter | Value | Unit |
|---|---|---|
| 1 | – | |
| 1 | – | |
| 6000 | J | |
| 6000 | J | |
| , | 1 | kg |
| 300 | N/m | |
| 10 | N· s/m |
| Controller | Expression |
|---|---|
| 100 + 10/s | |
| 100 + 10 s + 10/s | |
| + | |
| 2 | |
| 0 | |
| − | |
| 1 | |
| −1 |
| RMSE | 0.1476 | 0.0892 | ||||
| MAE | 0.1293 | 0.0451 | ||||
| DTW | 0.0241 | 0.0916 | 15.7646 | 0.0032 | 0.0061 | 10.6624 |
| Proposed WVC Method | Conventional WV Method [31] | |||||
|---|---|---|---|---|---|---|
| RMSE | 0.1476 | 0.0012 | 0.0058 | 0.1444 | ||
| MAE | 0.1293 | 0.0011 | 0.0049 | 0.1210 | ||
| DTW | 0.0241 | 0.0916 | 15.7646 | 0.3084 | 1.6541 | 29.9781 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Liu, C.; Zhang, L.; Teng, L.; Tian, J.; Xu, S.; Zheng, W. Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators. Electronics 2025, 14, 2595. https://doi.org/10.3390/electronics14132595
Yang B, Liu C, Zhang L, Teng L, Tian J, Xu S, Zheng W. Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators. Electronics. 2025; 14(13):2595. https://doi.org/10.3390/electronics14132595
Chicago/Turabian StyleYang, Bo, Chao Liu, Lei Zhang, Long Teng, Jiawei Tian, Siyuan Xu, and Wenfeng Zheng. 2025. "Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators" Electronics 14, no. 13: 2595. https://doi.org/10.3390/electronics14132595
APA StyleYang, B., Liu, C., Zhang, L., Teng, L., Tian, J., Xu, S., & Zheng, W. (2025). Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators. Electronics, 14(13), 2595. https://doi.org/10.3390/electronics14132595