Figure 1.
Structural diagram of the self-starting permanent magnet synchronous motor.
Figure 1.
Structural diagram of the self-starting permanent magnet synchronous motor.
Figure 2.
3D structure diagram of the studied self-starting permanent magnet synchronous motor.
Figure 2.
3D structure diagram of the studied self-starting permanent magnet synchronous motor.
Figure 3.
Fluid flow direction and rotating fluid domain. (a) The direction of fluid flow; (b) rotating fluid domain.
Figure 3.
Fluid flow direction and rotating fluid domain. (a) The direction of fluid flow; (b) rotating fluid domain.
Figure 4.
Mesh section of self-starting permanent magnet synchronous motor.
Figure 4.
Mesh section of self-starting permanent magnet synchronous motor.
Figure 5.
Flow velocity distribution of fluid inside the motor.
Figure 5.
Flow velocity distribution of fluid inside the motor.
Figure 6.
Air velocity distribution of motor end cavity and air gap.
Figure 6.
Air velocity distribution of motor end cavity and air gap.
Figure 7.
Flow velocity distribution of fluid at the end of motor winding.
Figure 7.
Flow velocity distribution of fluid at the end of motor winding.
Figure 8.
Flow velocity distribution of external fluid in the self-starting permanent magnet synchronous motor.
Figure 8.
Flow velocity distribution of external fluid in the self-starting permanent magnet synchronous motor.
Figure 9.
Air velocity distribution on the surface of the motor casing and fan surface. (a) Velocity diagram of the outer surface of the casing; (b) velocity diagram of the fan.
Figure 9.
Air velocity distribution on the surface of the motor casing and fan surface. (a) Velocity diagram of the outer surface of the casing; (b) velocity diagram of the fan.
Figure 10.
Sampling line position and velocity distribution of the ventilation ditch.
Figure 10.
Sampling line position and velocity distribution of the ventilation ditch.
Figure 11.
Temperature distribution of self-starting permanent magnet synchronous motor.
Figure 11.
Temperature distribution of self-starting permanent magnet synchronous motor.
Figure 12.
Temperature distribution of stator and winding. (a) Stator temperature; (b) winding temperature.
Figure 12.
Temperature distribution of stator and winding. (a) Stator temperature; (b) winding temperature.
Figure 13.
Position and temperature distribution of winding axial sampling line.
Figure 13.
Position and temperature distribution of winding axial sampling line.
Figure 14.
Radial sampling line position and temperature distribution at the end of the iron core.
Figure 14.
Radial sampling line position and temperature distribution at the end of the iron core.
Figure 15.
Temperature distribution of rotor. (a) Outlet side rotor temperature; (b) inlet air side rotor temperature.
Figure 15.
Temperature distribution of rotor. (a) Outlet side rotor temperature; (b) inlet air side rotor temperature.
Figure 16.
Temperature distribution of the permanent magnet and starter cage. (a) Permanent magnet temperature; (b) starting cage temperature.
Figure 16.
Temperature distribution of the permanent magnet and starter cage. (a) Permanent magnet temperature; (b) starting cage temperature.
Figure 17.
Position and temperature distribution of the axial sampling line on the rotor.
Figure 17.
Position and temperature distribution of the axial sampling line on the rotor.
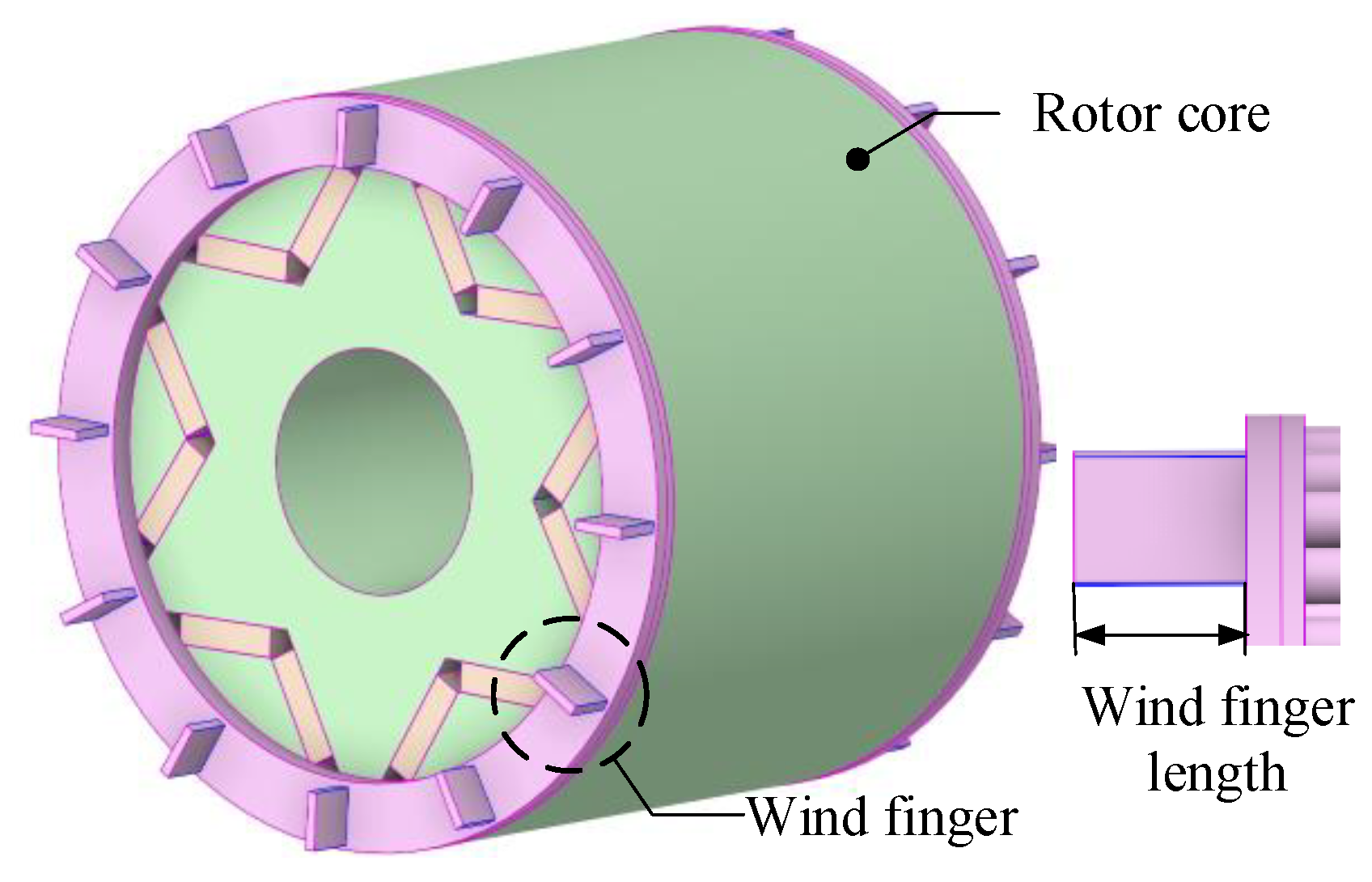
Figure 18.
Schematic diagram of rotor wind-finger structure.
Figure 18.
Schematic diagram of rotor wind-finger structure.
Figure 19.
Distribution of air velocity in end chambers with different lengths of the wind-finger structure. (a) 0 mm wind-finger lengths; (b) 5 mm wind-finger lengths; (c) 10 mm wind-finger lengths; (d) 15 mm wind-finger lengths; (e) 20 mm wind-finger lengths.
Figure 19.
Distribution of air velocity in end chambers with different lengths of the wind-finger structure. (a) 0 mm wind-finger lengths; (b) 5 mm wind-finger lengths; (c) 10 mm wind-finger lengths; (d) 15 mm wind-finger lengths; (e) 20 mm wind-finger lengths.
Figure 20.
Temperature distribution of motor cross-sections with different wind-finger lengths. (a) 0 mm wind-finger lengths; (b) 5 mm wind-finger lengths; (c) 10 mm wind-finger lengths; (d) 15 mm wind-finger lengths; (e) 20 mm wind-finger lengths.
Figure 20.
Temperature distribution of motor cross-sections with different wind-finger lengths. (a) 0 mm wind-finger lengths; (b) 5 mm wind-finger lengths; (c) 10 mm wind-finger lengths; (d) 15 mm wind-finger lengths; (e) 20 mm wind-finger lengths.
Figure 21.
Average temperature at the end of the winding on the outlet side of motors with different wind-finger lengths.
Figure 21.
Average temperature at the end of the winding on the outlet side of motors with different wind-finger lengths.
Figure 22.
Measurement experimental platform and temperature measurement location. (a) Experimental platform; (b) sensor burial location.
Figure 22.
Measurement experimental platform and temperature measurement location. (a) Experimental platform; (b) sensor burial location.
Table 1.
Parameter table of the studied self-starting permanent magnet synchronous motor.
Table 1.
Parameter table of the studied self-starting permanent magnet synchronous motor.
| Name/Symbol | Value/Unit | Name/Symbol | Value/Unit |
|---|
| Rated Power/ | 3/kW | Core Length/ | 95/mm |
| Number of Pole Pairs/ | 3 | Stator Inner Diameter/ | 74.0/mm |
| Number of Stator Slot/ | 36 | Stator Slot Bottom Inner Diameter/ | 92.5/mm |
| Stator Slot Opening Outer Diameter/ | 74.5/mm | Number of Rotor Slots/ | 42.0/mm |
| Width of Permanent Magnet/ | 22.5/mm | Rotor Inner Diameter/ | 73.5/mm |
| Rotational Speed/ | 1000/rpm | Thickness of Permanent Magnet/ | 6.0/mm |
Table 2.
The material characteristic parameter of motor.
Table 2.
The material characteristic parameter of motor.
| Motor Components | Thermal Conductivity Coefficient/ | Density/ | Specific Heat Capacity/ |
|---|
| Silicon steel sheet | 40 | 7600 | 500 |
| Insulation | 0.2 | 1250 | 950 |
| Winding | 400 | 8800 | 385 |
| Chassis | 40 | 7950 | 495 |
| Guide bar | 210 | 2578 | 1050 |
Table 3.
A hybrid mesh strategy.
Table 3.
A hybrid mesh strategy.
| Application Area | Grid Type | Specific Settings/Functions |
|---|
| Stator slots, permanent magnets, starting cages | Hexahedral grid | Accurately calculate flow and thermal gradients |
| Permanent magnet gap, heat sink fin area | Polyhedron mesh | Applied to the meshing of the corresponding area |
| Air gap, insulation layer | Three-layer polyhedron mesh | Simulate the boundary layer effect |
Table 4.
Rated losses of various structural components of the motor.
Table 4.
Rated losses of various structural components of the motor.
Location
Distribution | Stator Iron Loss | Winding Copper Loss | Rotor Loss | Permanent Magnet Losses | Starting Cage Loss |
|---|
| value (W) | 37.1 | 123 | 4.1 | 1.3 | 1.9 |
Table 5.
Average temperature of each structure of the motor.
Table 5.
Average temperature of each structure of the motor.
| Rotor/°C | Winding/°C | Stator/°C | Stator/°C |
|---|
| 71.02 | 87.21 | 68.9 | 71.05 |
Table 6.
The average and maximum flow velocity of air in end chambers with different lengths of wind-finger.
Table 6.
The average and maximum flow velocity of air in end chambers with different lengths of wind-finger.
| Wind Stab Length/mm | 0 | 5 | 10 | 15 | 20 |
|---|
| Average air velocity in the end cavity/(m/s) | 0.2 | 0.24 | 0.63 | 0.75 | 0.83 |
| Maximum air flow velocity in the end cavity/(m/s) | 7.51 | 7.95 | 7.98 | 8.1 | 8.12 |
Table 7.
Average temperature of the motor structure with wind-fingers of different lengths.
Table 7.
Average temperature of the motor structure with wind-fingers of different lengths.
| Wind-Finger Lengths | 0 mm | 5 mm | 10 mm | 15 mm | 20 mm |
|---|
| stator/°C | 68.90 | 68.1 | 67.21 | 66.72 | 66.43 |
| winding/°C | 87.21 | 86.5 | 85.63 | 84.88 | 84.35 |
| magnet/°C | 71.05 | 71.08 | 70.55 | 69.96 | 69.65 |
| rotor/°C | 71.02 | 71.05 | 70.48 | 69.93 | 69.66 |
Table 8.
Comparison of testing points on temperature.
Table 8.
Comparison of testing points on temperature.
| Temperature Measurement Location | Experimental Value/°C | Calculating Value/°C | Error |
|---|
| E1 | 88.6 | 91.0 | 2.7% |
| E2 | 86.8 | 88.8 | 2.3% |
| F1 | 74.5 | 77.3 | 3.7% |
| F2 | 72.7 | 75.0 | 3.1% |


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}