
Resilient Dynamic State Estimation for Power System Based on Modified Cubature Kalman Filter Against Non-Gaussian Noise and Outliers


 ,
,
Abstract
1. Introduction
- An estimator based on the exponential absolute value is established, which is represented by the exponential absolute value function and quadratic function.
- The regression form of batch processing mode is established, and the estimator based on the exponential absolute value is integrated into the cubature Kalman filter framework.
2. Dynamic State Estimation Model of Power System
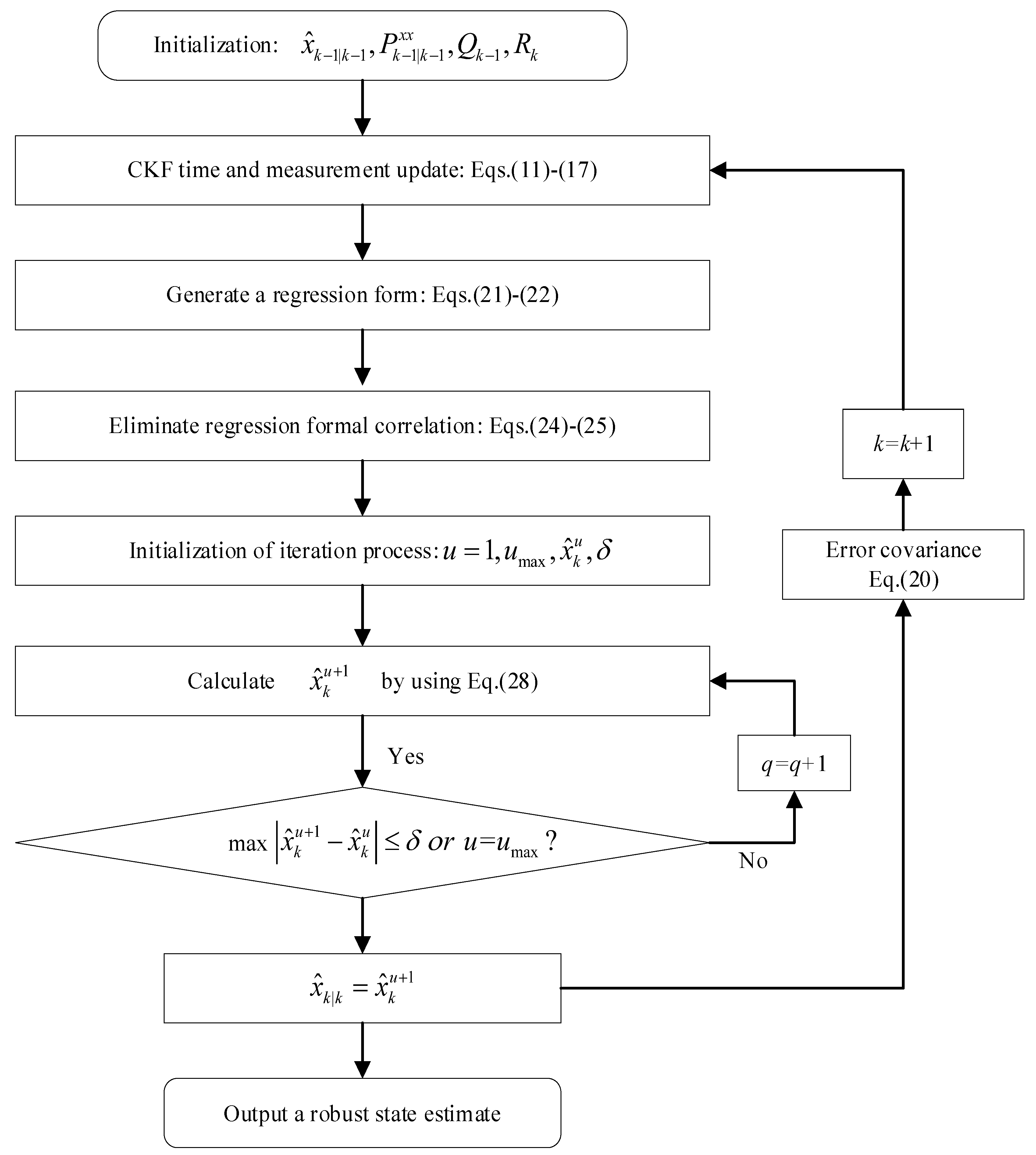
3. Proposed RF-CKF Method
3.1. Robust Function-Based Estimator
3.2. RF-CKF Estimation Method
3.2.1. State Prediction
3.2.2. Measurement Update
3.2.3. State Update
3.2.4. Linear Regression Model Derivation
4. Simulation Results
4.1. Case 1: Gaussian Noise Test
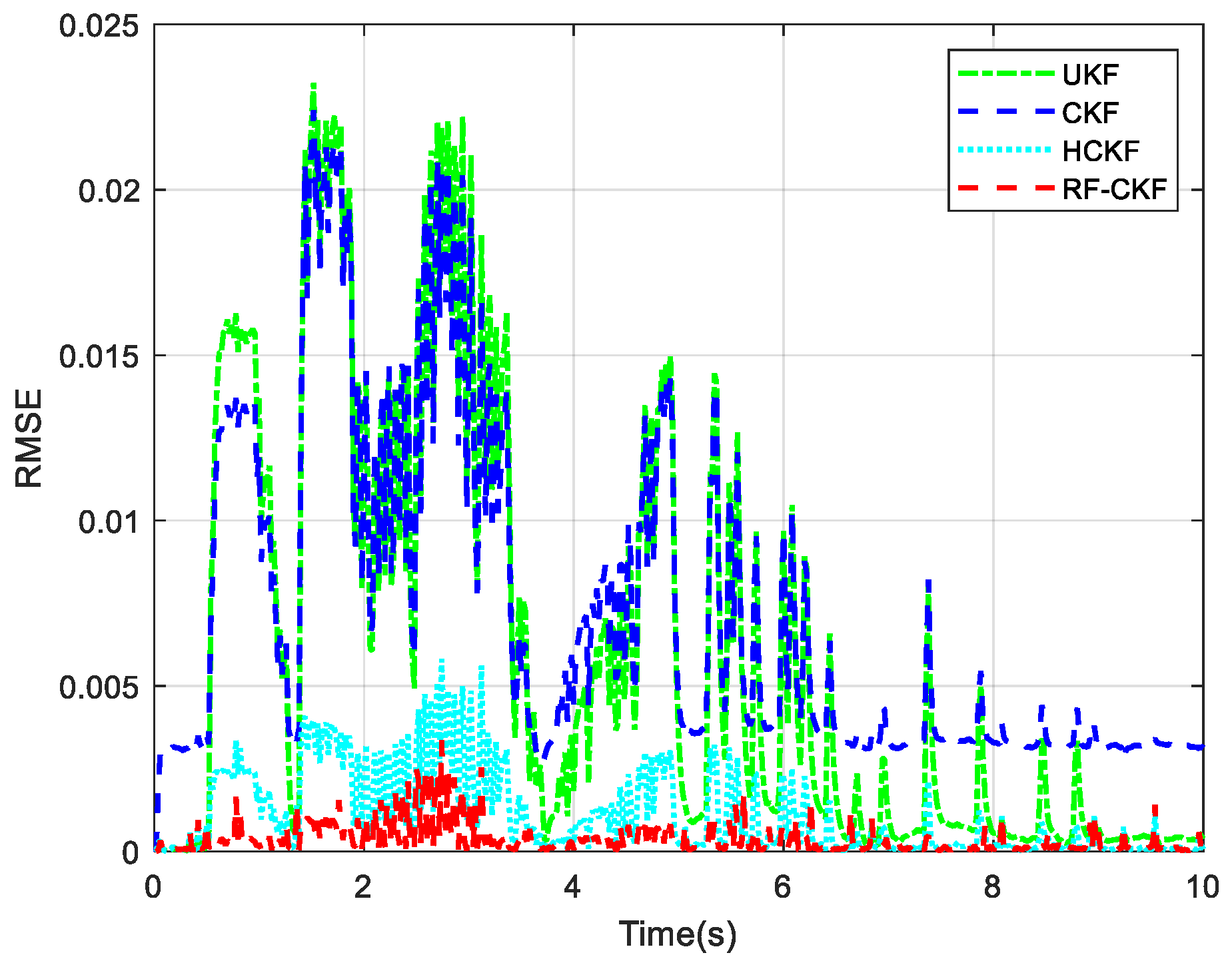
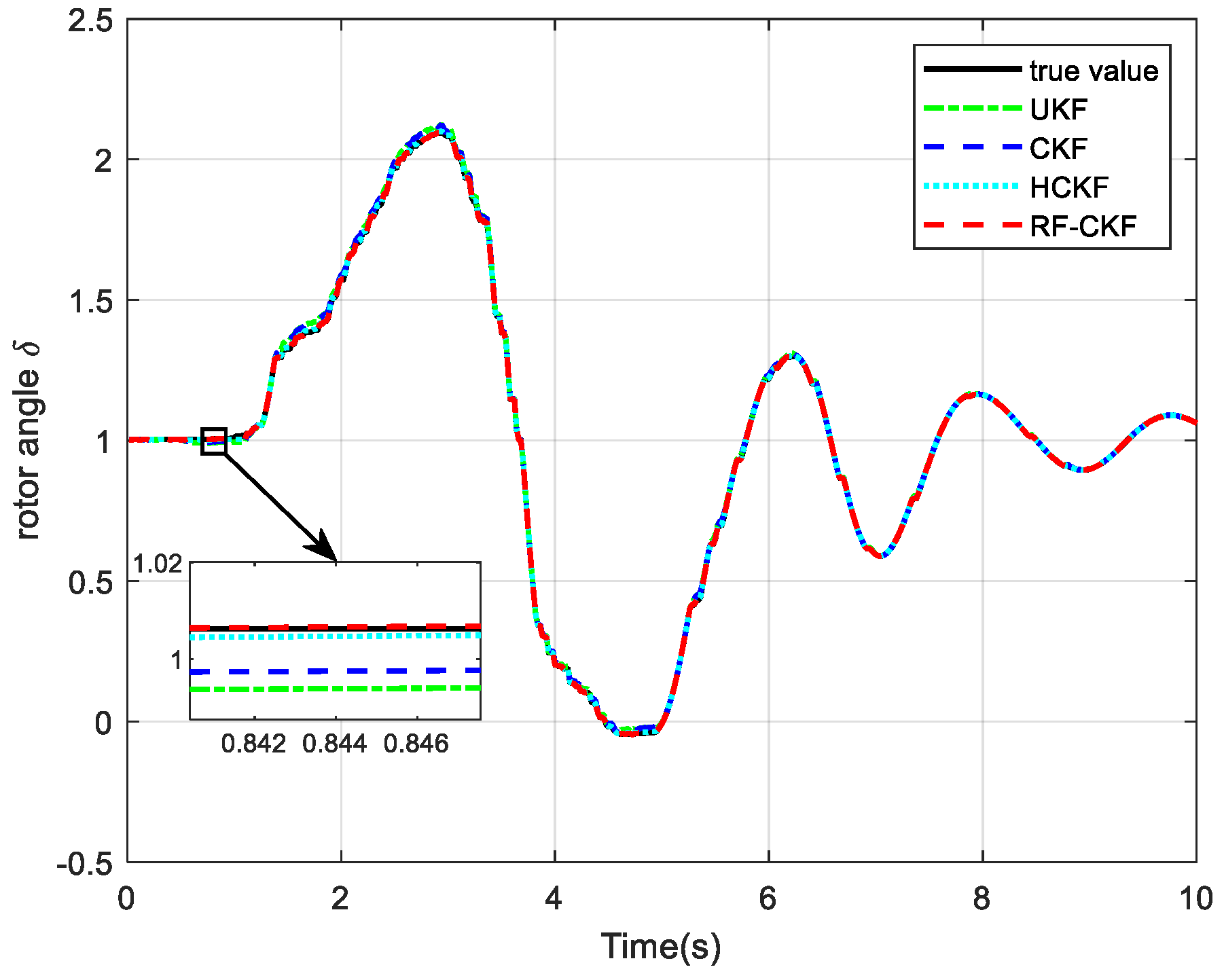
4.2. Case 2: Non-Gaussian Noise Test
4.3. Case 3: Observation Outliers Conditions
5. Conclusions
- (1)
- The established robust estimator, represented by the exponential absolute value function and the quadratic function, can integrate stability and sensitivity to abnormal measurements to solve the problem of poor estimation accuracy caused by abnormal measurements.
- (2)
- The RF-CKF method proposed in this paper can effectively handle non-Gaussian noise by using robust functions, better match the trajectories of real states, achieve the minimum estimation error, and improve the accuracy of state estimation.
- (3)
- After applying the research method of this study, the batch processing regression form utilizes more measurement data, which can effectively alleviate the destructive impact of outliers in the observed data, ensure its stability, and thereby reduce errors.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arefin, A.A.; Baba, M.; Singh, N.S.S.; Nor, N.B.M.; Sheikh, M.A.; Kannan, R.; Abro, G.E.M.; Mathur, N. Review of the techniques of the data nnalytics and islanding detection of distribution systems using phasor measurement unit data. Electronics 2022, 11, 2967. [Google Scholar] [CrossRef]
- Bashian, A.; Assili, M.; Anvari-Moghaddam, A.; Catalão, J.P.S. Optimal design of a wide area measurement system using hybrid wireless sensors and phasor measurement units. Electronics 2019, 8, 1085. [Google Scholar] [CrossRef]
- Zhu, M.; Liu, H.; Bi, T.; Xie, Y.; Zhao, J. Dynamic state estimation method for generators considering bad data in input. Autom. Electr. Power Syst. 2022, 46, 94–103. [Google Scholar]
- Muscas, C.; Pegoraro, P.A.; Sulis, S.; Pau, M.; Pinci, M.; Monti, A. New Kalman filter approach exploiting frequency knowledge for accurate PMU-based power system state estimation. IEEE Trans. Instrum. Meas. 2020, 69, 6713–6722. [Google Scholar] [CrossRef]
- Le, J.; Li, X.; Zhou, Q.; Zhao, L. Multi-area distributed state estimation method for power system. Electr. Power Autom. Equip. 2020, 40, 165–173. [Google Scholar]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-filter-based dynamic state estimation algorithms of power systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, Q.; Lin, D.; Wang, S. Generalized loss based geometric unscented Kalman filter for robust power system forecasting-aided state estimation. IEEE Signal Process. Lett. 2022, 29, 2353–2357. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Zou, T.; Zeng, W.; Yang, W.; Ong, M.C.; Wang, Y.; Situ, W. An adaptive robust cubature Kalman filter based on sage-husa estimator for improving ship heave measurement accuracy. IEEE Sens. J. 2023, 23, 10089–10099. [Google Scholar] [CrossRef]
- He, J.; Sun, C.; Zhang, B.; Wang, P. Maximum correntropy square-root cubature Kalman filter for non-gaussian measurement noise. IEEE Access 2020, 8, 70162–70170. [Google Scholar] [CrossRef]
- Mahshad, V.; Luis, R.S. Abridged Gaussian sum extended Kalman filter for nonlinear state estimation under non-Gaussian process uncertainties. Comput. Chem. Eng. 2021, 155, 107534. [Google Scholar]
- Dang, L.; Wang, W.; Chen, B. Square root unscented Kalman filter with modified measurement for dynamic state estimation of power systems. IEEE Trans. Instrum. Meas. 2022, 71, 1–13. [Google Scholar] [CrossRef]
- Jiang, K.; Zhang, H.; Karimi, H.R.; Lin, J.; Song, L. Simultaneous input and state estimation for integrated motor-transmission systems in a controller area network environment via an adaptive unscented Kalman filter. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1570–1579. [Google Scholar] [CrossRef]
- Lv, Y.; Yang, G. An adaptive cubature Kalman filter for nonlinear systems against randomly occurring injection attacks. Appl. Math. Comput. 2022, 418, 126834. [Google Scholar] [CrossRef]
- Ghahremani, E.; Kamwa, I. Dynamic state estimation in power system by applying the extended Kalman filter with unknown inputs to phasor measurements. IEEE Trans. Power Syst. 2011, 26, 2556–2566. [Google Scholar] [CrossRef]
- Zafeiropoulou, M.; Sijakovic, N.; Zarkovic, M.; Ristic, V.; Terzic, A.; Makrygiorgou, D.; Zoulias, E.; Vita, V.; Maris, T.I.; Fotis, G. A Flexibility Platform for Managing Outages and Ensuring the Power System’s Resilience during Extreme Weather Conditions. Processes 2023, 11, 3432. [Google Scholar] [CrossRef]
- Zhao, H.; Tian, B. Robust power system forecasting-aided state estimation with generalized maximum mixture correntropy unscented Kalman filter. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Liu, X.; Ren, Z.; Lyu, H.; Jiang, Z.; Ren, P.; Chen, B. Linear and nonlinear regression-based maximum correntropy extended Kalman filtering. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3093–3102. [Google Scholar] [CrossRef]
- Ma, W.; Qiu, J.; Liu, X.; Xiao, G.; Duan, J.; Chen, B. Unscented Kalman filter with generalized correntropy loss for robust power system forecasting-aided state estimation. IEEE Trans. Ind. Inform. 2019, 15, 6091–6100. [Google Scholar] [CrossRef]
- Song, H.; Ding, D.; Dong, H. Distributed filtering based on Cauchy-kernel-based maximum correntropy subject to randomly occurring cyber-attacks. Automatica 2022, 135, 110004. [Google Scholar] [CrossRef]
- Deng, Z.; Shi, L.; Yin, L.; Xia, Y.; Huo, B. UKF based on maximum correntropy criterion in the presence of both intermittent observations and non-Gaussian noise. IEEE Sens. J. 2020, 20, 7766–7773. [Google Scholar] [CrossRef]
- Zhao, H.; Hu, J. Iterative unscented Kalman filter with general robust loss function for power system forecasting-aided state estimation. IEEE Trans. Instrum. Meas. 2024, 73, 1–9. [Google Scholar] [CrossRef]
- Shi, N.; Chen, Z.; Niu, M.; He, Z.; Wang, Y.; Cui, J. State-of-charge estimation for the lithium-ion battery based on adaptive extended Kalman filter using improved parameter identification. J. Energy Storage 2022, 45, 103518. [Google Scholar] [CrossRef]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M. A state of charge estimation method for lithium-ion batteries based on fractional order adaptive extended Kalman filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Ai, R.; Sun, Y.; Wang, Y.; Wei, Z.; Sun, G. Dynamic state estimation of generator based on interpolated extended Kalman filter. Proc. CSEE 2018, 38, 5846–5853. [Google Scholar]
- Kazmi, S.; Ulasyar, A.; Khattak, A.; Zad, H.S. A new state of charge estimation technique of lithium-ion battery using adaptive extended Kalman filter and artificial neural network. Trans. Inst. Meas. Control 2023, 45, 014233122211285. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, J.; Zhang, P.; Liu, F.; Mei, S. Robust state estimator based on maximum exponential absolute value. IEEE Trans. Smart Grid 2017, 8, 1537–1544. [Google Scholar] [CrossRef]
- Chen, T.; Wu, T.; Qing, X.; Amaratunga, G.A.J. A distributed robust state estimation algorithm for power systems considering maximum exponential absolute value. Int. J. Electr. Power Energy Syst. 2021, 133, 107267. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Mili, L. A robust iterated extended Kalman filter for power system dynamic state estimation. IEEE Trans. Power Syst. 2017, 32, 3205–3216. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, Y.; Dinavahi, V.; Wang, K.; Nan, D. Robust dynamic state estimation of power system with model uncertainties based on adaptive unscented filter. IET Gener. Transm. Distrib. 2019, 13, 2455–2463. [Google Scholar]
- Zhao, J.; Mili, L. A theoretical framework of robust H-infinity unscented Kalman filter and its application to power system dynamic state estimation. IEEE Trans. Signal Process. 2019, 67, 2734–2746. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | UKF | CKF | HCKF | RF-CKF |
|---|---|---|---|---|
| 0.0116 | 0.0110 | 0.0020 | 0.0004 | |
| 0.1606 | 0.1603 | 0.0246 | 0.0028 | |
| 0.0055 | 0.0053 | 0.0017 | 0.0010 | |
| 0.0124 | 0.0127 | 0.0021 | 0.0005 |
| Metric | UKF | CKF | HCKF | RF-CKF |
|---|---|---|---|---|
| 0.0119 | 0.0112 | 0.0026 | 0.0016 | |
| 0.1539 | 0.1537 | 0.1172 | 0.1148 | |
| 0.0052 | 0.0051 | 0.0021 | 0.0018 | |
| 0.0123 | 0.0126 | 0.0023 | 0.0015 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Z.; Li, C.; Tian, C.; Wang, Y.; Pan, X.; Zhang, G.; Li, Q. Resilient Dynamic State Estimation for Power System Based on Modified Cubature Kalman Filter Against Non-Gaussian Noise and Outliers. Electronics 2025, 14, 2430. https://doi.org/10.3390/electronics14122430
Gao Z, Li C, Tian C, Wang Y, Pan X, Zhang G, Li Q. Resilient Dynamic State Estimation for Power System Based on Modified Cubature Kalman Filter Against Non-Gaussian Noise and Outliers. Electronics. 2025; 14(12):2430. https://doi.org/10.3390/electronics14122430
Chicago/Turabian StyleGao, Ze, Chenghao Li, Chunsun Tian, Yi Wang, Xueqing Pan, Guanyu Zhang, and Qionglin Li. 2025. "Resilient Dynamic State Estimation for Power System Based on Modified Cubature Kalman Filter Against Non-Gaussian Noise and Outliers" Electronics 14, no. 12: 2430. https://doi.org/10.3390/electronics14122430
APA StyleGao, Z., Li, C., Tian, C., Wang, Y., Pan, X., Zhang, G., & Li, Q. (2025). Resilient Dynamic State Estimation for Power System Based on Modified Cubature Kalman Filter Against Non-Gaussian Noise and Outliers. Electronics, 14(12), 2430. https://doi.org/10.3390/electronics14122430