
One Possible Path Towards a More Robust Task of Traffic Sign Classification in Autonomous Vehicles Using Autoencoders

 , ,
, , 
Abstract
1. Introduction
1.1. Research Hypotheses and Objectives
- –
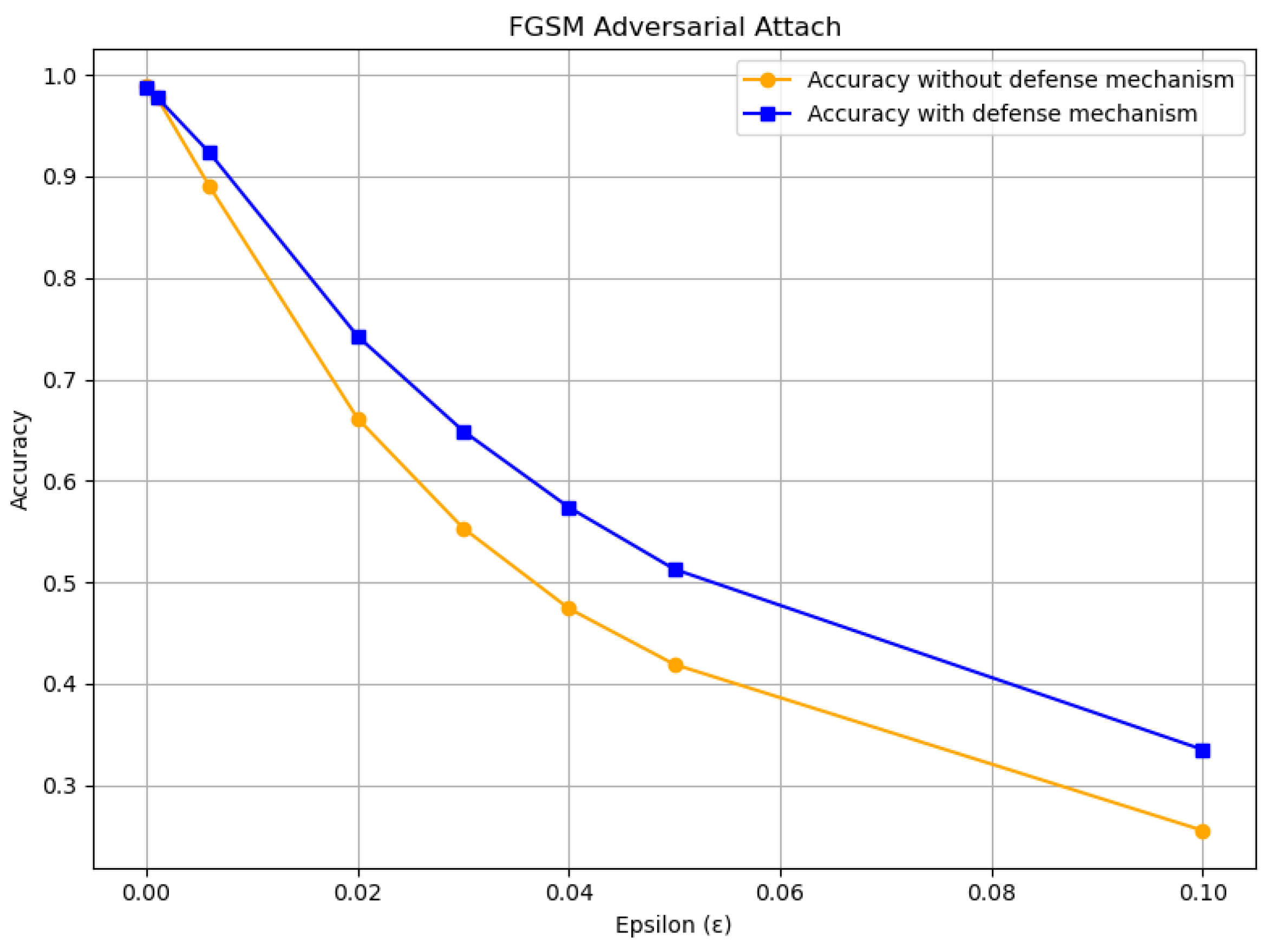
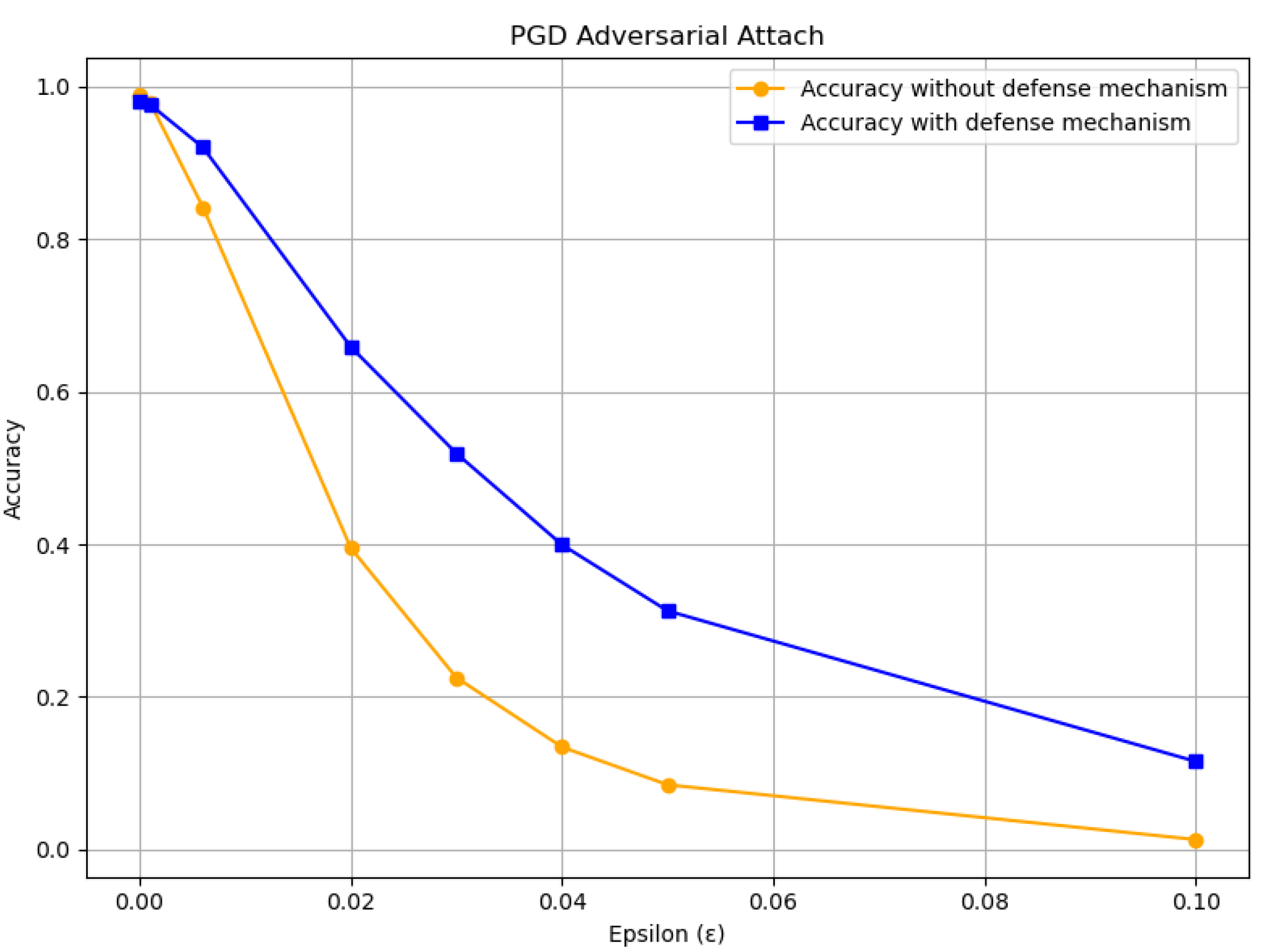
- Analyze the vulnerability of traffic sign classification systems to two widely used white-box adversarial attack methods (i.e., FGSM and PGD).
- –
- Design and evaluate a dual-mode autoencoder-based defense system capable of both detecting and restoring images affected by such attacks.
- –
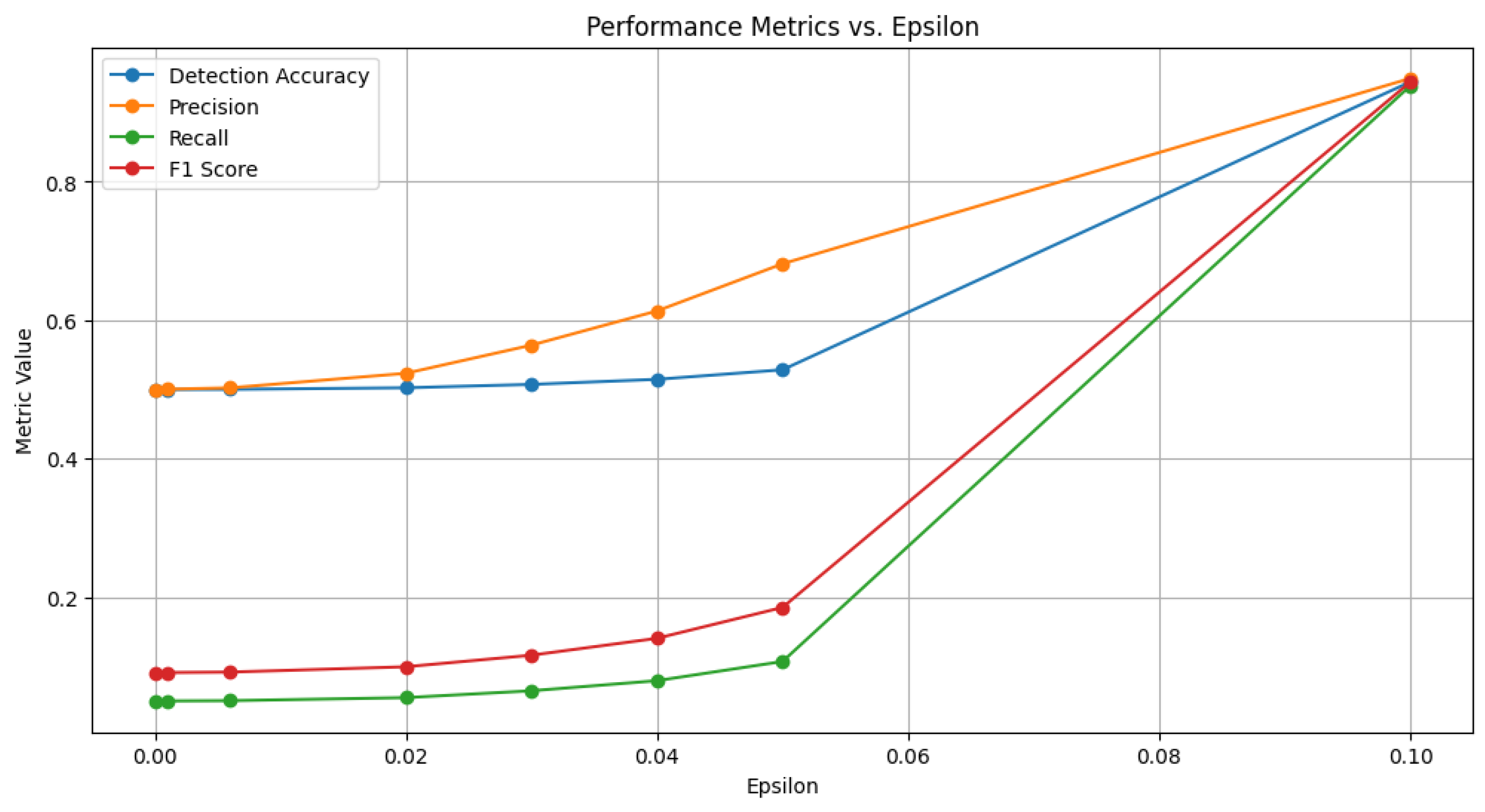
- Introduce a feature-based autoencoder that enhances detection performance in low-perturbation scenarios, addressing a known limitation of conventional autoencoders.
- –
- Contribute to the development of safer and more reliable AV perception systems, in alignment with safety standards such as ISO 21448 [5], by proposing a defense strategy that prioritizes robustness, even at the cost of higher false positive rates in safety-critical contexts.
1.2. List of Abbreviations
- –
- ATC, Automated and connected transport.
- –
- AI, Artificial intelligence.
- –
- ATC, Automatic train control.
- –
- AV, Autonomous vehicle.
- –
- CNN, Convolutional neural network.
- –
- C&W, Carlini and Wagner.
- –
- EATA, European Automotive-Telecom Alliance.
- –
- ETSI, European Telecommunications Standards Institute.
- –
- FDAV, Framework on Automated/Autonomous and Connected Vehicles.
- –
- FGSM, Fast Gradient Sign Method.
- –
- FPR, False positive rate.
- –
- GDPR, General Data Protection Regulation.
- –
- GTSRB, German Traffic Sign Recognition Benchmark.
- –
- IJCNN, Joint Conference on Neural Networks.
- –
- IoT, Internet of things.
- –
- ISO, International Organization for Standardization.
- –
- ITS. Intelligent transportation system.
- –
- IVHS, Intelligent vehicle highways system.
- –
- JSMA, Jacobian-based saliency map attack.
- –
- LiDAR, Light detection and ranging.
- –
- LLM, Large language model.
- –
- MSF, Multi-sensor fusion.
- –
- NHTSA, National Highway Traffic Safety Administration.
- –
- PGD, Projected gradient descent.
- –
- SAE, Society of Automotive Engineers.
- –
- US, United States.
- –
- V2I, Vehicle-to-infrastructure.
- –
- V2V, Vehicle-to-vehicle.
- –
- V2X, Vehicle-to-everything.
- –
- WHO, World Health Organization.
2. Background and Related Work
2.1. Artificial Intelligence and Safety Challenges in AVs
2.2. Adversarial Attacks in Traffic Sign Recognition
2.3. Limitations of Existing Defense Mechanisms
3. Materials and Methods
3.1. Data Collection
3.2. FGSM and PGD Adversarial Attacks
3.3. Adversarial Attacks Defense Approach with Autoencoder
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, S.; Li, L.; Tang, J.; Wu, S.; Gaudiot, J.L. Creating Autonomous Vehicle Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Ibrahum, A.D.M.; Hussain, M.; Hong, J.E. Deep learning adversarial attacks and defenses in autonomous vehicles: A systematic literature review from a safety perspective. Artif. Intell. Rev. 2024, 58, 28. [Google Scholar] [CrossRef]
- Wiseman, Y. Conjoint Vehicle License Plate identification System. Open Transp. J. 2020, 14, 164–173. [Google Scholar] [CrossRef]
- Pavlitska, S.; Lambing, N.; Zöllner, J.M. Adversarial Attacks on Traffic Sign Recognition: A Survey. arXiv 2023, arXiv:2307.08278. [Google Scholar]
- ISO 21448:2022; Road Vehicles—Safety of the Intended Functionality. Technical Report; International Organization for Standardization: Geneva, Switzerland, 2022.
- Jochem, T.; Pomerleau, D.; Kumar, B.; Armstrong, J. PANS: A Portable Navigation Platform. In Proceedings of the IEEE Symposium on Intelligent Vehicle, Detroit, MI, USA, 25–26 September 1995; Available online: https://www.cs.cmu.edu/~tjochem/nhaa/navlab5_details.html (accessed on 5 June 2025).
- Hamon, R.; Junklewitz, H.; Sanchez Martin, J.I.; Fernandez Llorca, D.; Gomez Gutierrez, E.; Herrera Alcantara, A.; Kriston, A. Artificial Intelligence in Automated Driving: An Analysis of Safety and Cybersecurity Challenges; JRC127189; European Commission: Brussels, Belgium, 2022; Available online: https://publications.jrc.ec.europa.eu/repository/handle/JRC127189 (accessed on 5 June 2025).
- Serban, A.; Poll, E.; Visser, J. A Standard Driven Software Architecture for Fully Autonomous Vehicles. JASEN 2020, 1, 20. [Google Scholar] [CrossRef]
- Katiyar, N.; Shukla, A.; Chawla, N.; Singh, R.; Singh, S.K.; Husain, M.F. AI in Autonomous Vehicles: Opportunities, Challenges, and Regulatory Implications. Educ. Adm. Theory Pract. 2024, 30, 6255–6264. [Google Scholar] [CrossRef]
- Garikapati, D.; Shetiya, S.S. Autonomous Vehicles: Evolution of Artificial Intelligence and the Current Industry Landscape. BDCC 2024, 8, 42. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E.; Hall, M.A.; Pal, C.J. Deep learning. In Data Mining; Morgan Kaufmann: Burlington, MA, USA, 2017; pp. 417–466. [Google Scholar] [CrossRef]
- Legal Team. The Safest Forms of Transportation; Shaw Cowart Attorneys at Law LLP: Austin, TX, USA, 2025; Available online: https://www.shawcowart.com/what-are-considered-the-safest-modes-of-transportation/#:~:text=Car%20travel%20is%20risky%20and,more%20dangerous%20than%20passenger%20boating (accessed on 5 June 2025).
- World Health Organization. Road Traffic Injuries; WHO: Geneva, Switzerland, 2023; Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries#:~:text=Approximately%201.19%20million%20people%20die,adults%20aged%205%E2%80%9329%20years (accessed on 5 June 2025).
- Boyce Holleman & Associates. What Percentage of Car Crashes Are Caused by Human Error? Available online: https://boyceholleman.com/car-crashes-are-caused-by-human-error/#:~:text=Worldwide%2C%20studies%20consistently%20show%20that,staggering%2094%25%20of%20all%20crashes.&text=In%20Mississippi%2C%20the%20numbers%20tell%20a%20similar%20story (accessed on 5 June 2025).
- Smith, B.W. Human Error as a Cause of Vehicle Crashes; Stanford Center for Internet and Society: Stanford, CA, USA, 2013; Available online: https://cyberlaw.stanford.edu/blog/2013/12/human-error-cause-vehicle-crashes/ (accessed on 5 June 2025).
- Rose, A.; Miracle, V.; Kopp, J. A woman was found trapped under a driverless car. It wasn’t the first car to hit her. Cable News Network. 3 October 2023. Available online: https://edition.cnn.com/2023/10/03/tech/driverless-car-pedestrian-injury/index.html (accessed on 5 June 2025).
- Dede, G.; Naydenov, R.; Malatras, A.; Hamon, R.; Junklewitz, H.; Sanchez, I. Cybersecurity Challenges in the Uptake of Artificial Intelligence in Autonomous Driving; ENISA and JRC, ENISA Reports; The Publications Office of the European Union: Luxembourg, 2021; Available online: https://www.enisa.europa.eu/sites/default/files/publications/ENISA-JRC%20Report%20-%20Cybersecurity%20Challenges%20in%20the%20Uptake%20of%20Artificial%20Intelligence%20in%20Autonomous%20Driving.pdf (accessed on 5 June 2025).
- Mateo Sanguino, T.J.; Lozano Domínguez, J.M.; De Carvalho Baptista, P. Cybersecurity certification and auditing of automotive industry. Adv. Transp. Policy Plan. 2020, 5, 95–124. [Google Scholar] [CrossRef]
- Bonnefo, J.F. Ethics of Connected and Automated Vehicles Recommendations on Road Safety, Privacy, Fairness, Explainability and Responsibility; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- Dentons. Global Guide to Autonomous Vehicles 2024. Available online: https://www.dentons.com/en/insights/guides-reports-and-whitepapers/2024/may/29/global-guide-to-autonomous-vehicles-2024 (accessed on 5 June 2025).
- UNECE. Framework Document for Automated/Autonomous Vehicles (UPDATED); United Nations Economic Commission for Europe: Geneva, Switzerland, 2022; Available online: https://unece.org/info/publications/pub/365097 (accessed on 5 June 2025).
- Wang, J.; Shi, L.; Zhao, Y.; Zhang, H.; Szczerbicki, E. Adversarial attack algorithm for traffic sign recognition. Multimed Tools Appl. 2022. [Google Scholar] [CrossRef]
- Mykola. GTSRB—German Traffic Sign Recognition Benchmark; Kaggle Inc.: San Francisco, CA, USA, 2011; Available online: https://www.kaggle.com/datasets/meowmeowmeowmeowmeow/gtsrb-german-traffic-sign/data (accessed on 5 June 2025).
- Stallkamp, J.; Schlipsing, M.; Salmen, J.; Igel, C. The German Traffic Sign Recognition Benchmark: A multi-class classification competition. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 1453–1460. [Google Scholar] [CrossRef]
- Kansal, K.; Krishna, P.S.; Jain, P.B.; Honnavalli, S.R.P.; Eswaran, S. Defending against adversarial attacks on COVID-19 classifier: A denoiser-based approach. Heliyon 2022, 8, e11209. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhang, F.; Hou, Z.; Mian, L.; Wang, Z.; Zhang, J.; Tang, J. Self-supervised Learning: Generative or Contrastive. IEEE Trans. Knowl. Data Eng. 2021, 35, 857–876. [Google Scholar] [CrossRef]
- Ye, H.; Liu, X. Feature autoencoder for detecting adversarial examples. Int. J. Intell. Syst 2022, 37, 7459–7477. [Google Scholar] [CrossRef]
- Xu, H.; Ma, Y.; Liu, H.C. Adversarial Attacks and Defenses in Images, Graphs and Text: A Review. Int. J. Autom. Comput. 2020, 17, 151–178. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Benefits | Challenges |
|---|---|---|
| Drivers |
|
|
| Governments |
|
|
| Cities |
|
|
| FGSM | PGD |
|---|---|
| x′—adversarial sample x—original sample ε—parameter controls the amount of noise added to the original sample Θ—model parameters (weights and biases) ∇xJ(Θ, x, y)—gradient | Π—projection in the specified norm x′t—adversarial image generated at iteration t ε—parameter controls the amount of noise added to the original sample Θ—model parameters (weights and biases) ∇xJ(Θ, x′, y)—gradient |
| Perturbation Level (ε) | Percentage (%) Average Difference bn3 Layer |
|---|---|
| 0 | 0% |
| 0.001 | 5.35% |
| 0.006 | 29.74% |
| 0.02 | 80.64% |
| 0.03 | 105.58% |
| 0.04 | 124.64% |
| 0.05 | 138.47% |
| 0.1 | 175.74% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinović, I.; Mateo Sanguino, T.d.J.; Jovanović, J.; Jovanović, M.; Djukanović, M. One Possible Path Towards a More Robust Task of Traffic Sign Classification in Autonomous Vehicles Using Autoencoders. Electronics 2025, 14, 2382. https://doi.org/10.3390/electronics14122382
Martinović I, Mateo Sanguino TdJ, Jovanović J, Jovanović M, Djukanović M. One Possible Path Towards a More Robust Task of Traffic Sign Classification in Autonomous Vehicles Using Autoencoders. Electronics. 2025; 14(12):2382. https://doi.org/10.3390/electronics14122382
Chicago/Turabian StyleMartinović, Ivan, Tomás de Jesús Mateo Sanguino, Jovana Jovanović, Mihailo Jovanović, and Milena Djukanović. 2025. "One Possible Path Towards a More Robust Task of Traffic Sign Classification in Autonomous Vehicles Using Autoencoders" Electronics 14, no. 12: 2382. https://doi.org/10.3390/electronics14122382
APA StyleMartinović, I., Mateo Sanguino, T. d. J., Jovanović, J., Jovanović, M., & Djukanović, M. (2025). One Possible Path Towards a More Robust Task of Traffic Sign Classification in Autonomous Vehicles Using Autoencoders. Electronics, 14(12), 2382. https://doi.org/10.3390/electronics14122382