
Research on Path Planning for Mobile Charging Robots Based on Improved A* and DWA Algorithms

Abstract
1. Introduction
- Aiming at the traditional A* algorithm’s insufficient obstacle avoidance in evaluation functions, this study introduces an obstacle influence factor and employs dynamic weight coefficients to balance global search optimality and local obstacle avoidance. This approach effectively reduces path deviation caused by obstacles, improving both the efficiency and safety of path planning in cluttered environments.
- To solve the problem of non-smooth motion due to excessive turning points in A*-generated paths, segmented Bezier curve optimization is applied to eliminate sharp angles and trajectory discontinuities. This method significantly enhances path smoothness, ensuring better compliance with the robot’s kinematic constraints and reducing motion instability in narrow spaces.
- Addressing the common issues of target loss and local minima in the standard DWA, this paper integrates a global guidance term and distance-dependent heading weights into the local evaluation function. These modifications enable the robot to maintain steady progress toward the target while dynamically avoiding moving obstacles, fundamentally improving the directivity and real-time adaptability of path planning in complex scenarios.
2. A* Algorithm Optimization
2.1. Traditional A* Algorithm
2.2. A* Algorithm Heuristic Function Optimization
2.3. Bezier Curve Smoothing Path
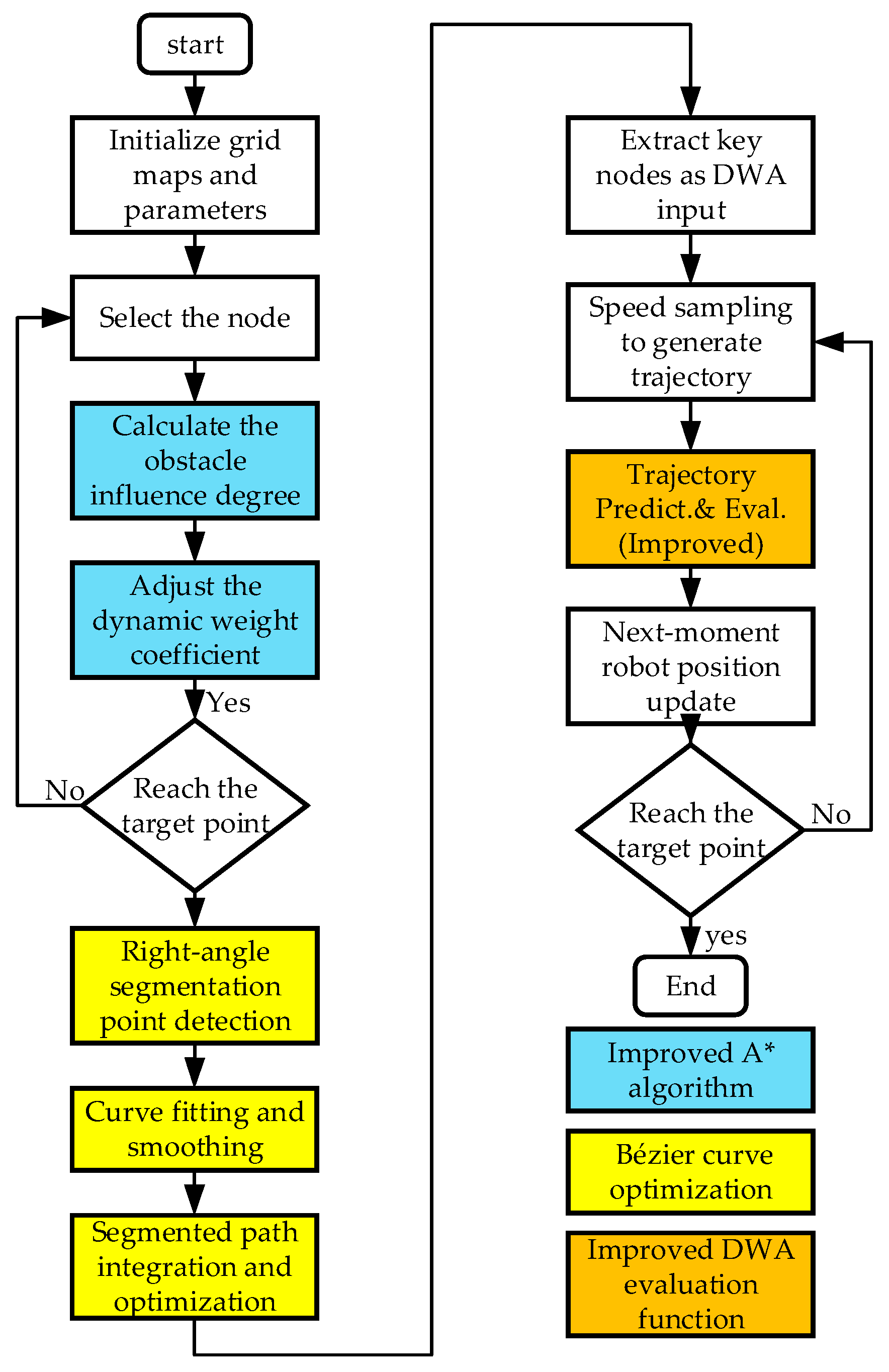
- Detect right angle points and split the path iteratively over the neighboring nodes , , in the path; calculate the angle at the node . If this angle is close to 90° (The error is ±5°), the node is labeled as a right-angle point, and this is used as the dividing point to split the path into sub-segments. Each sub-segment contains several consecutive nodes until the next right-angle point or the end of the path. If the angle of a node does not meet the conditions of a right angle, then continue to check the next node until the end of the path.
- For each sub-segment after segmentation, determine whether it is a straight segment. If the starting and ending directions of the sub-segment are the same (i.e., the angle is close to 0° or 180°), the straight line segment is retained directly; otherwise, the sub-segment is treated as a curve segment, and its nodes are extracted as the control points of the Bezier curve. The section is subjected to the Bezier curve smoothing process.
- The control points of curve segments are optimized through iterative adjustments, and their positions are optimized through several iterations. In each iteration, more points are sampled to accurately assess the curvature of the curve, and local adjustments are made to the control points whose curvature exceeds the limit to ensure the smoothing of the curve, and finally, a smooth Bezier curve is generated based on the optimized control points.
- All the smoothed straight line segments and curve segments are merged into a complete smooth path in order. Verify the merged path to check whether its curvature meets the maximum curvature limit and whether there is a derivative discontinuity. If the problem is found, it is adjusted according to the actual situation to ensure the smoothness and security of the final path.
3. Dynamic Window Approach
3.1. Kinematic Model of the Mobile Charging Robot
3.2. Velocity Space of the Mobile Charging Robot
3.3. Global Navigation and Dynamic Heading Adjustment
4. Fusion Algorithm
5. Simulation Validation
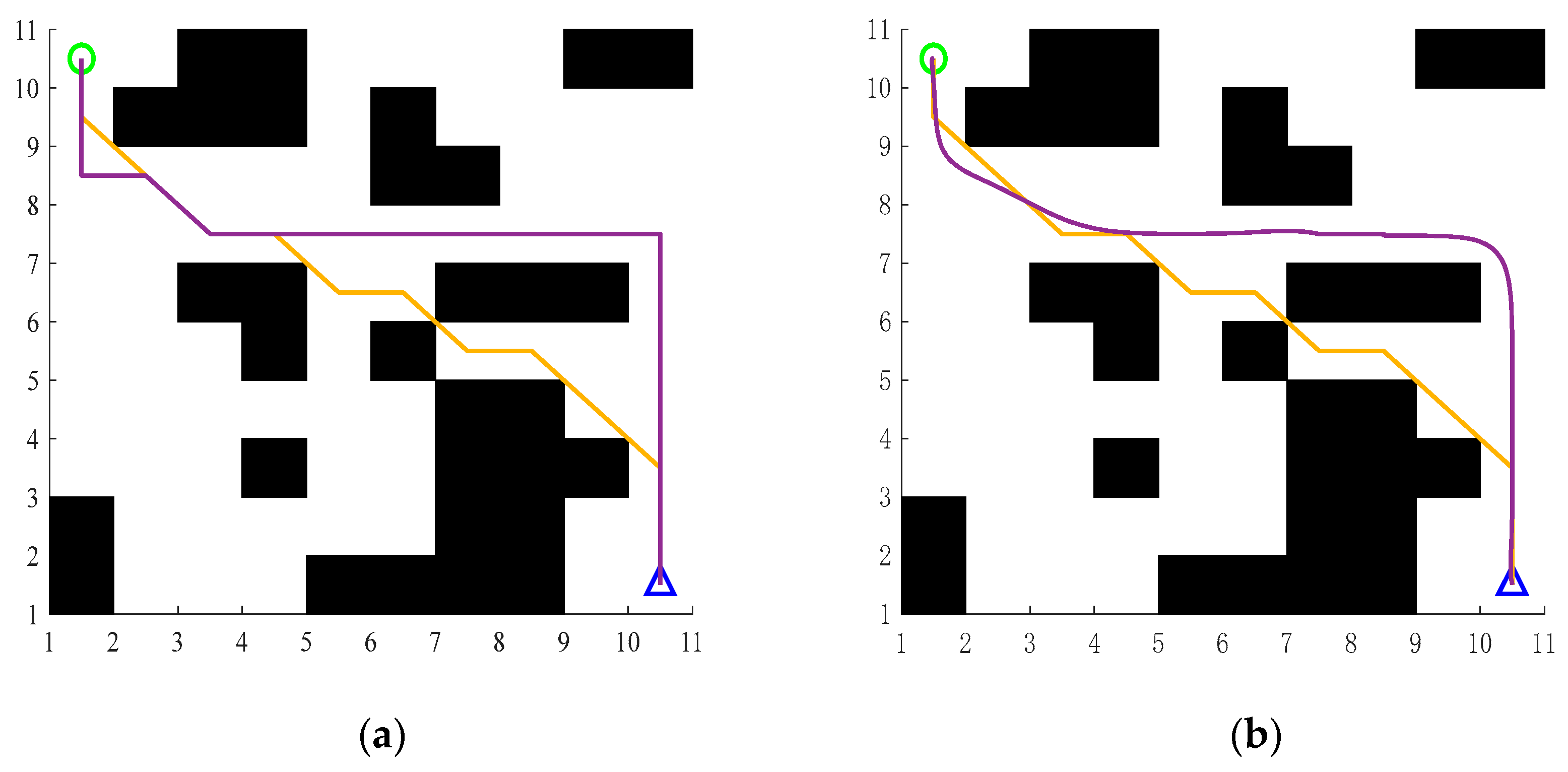
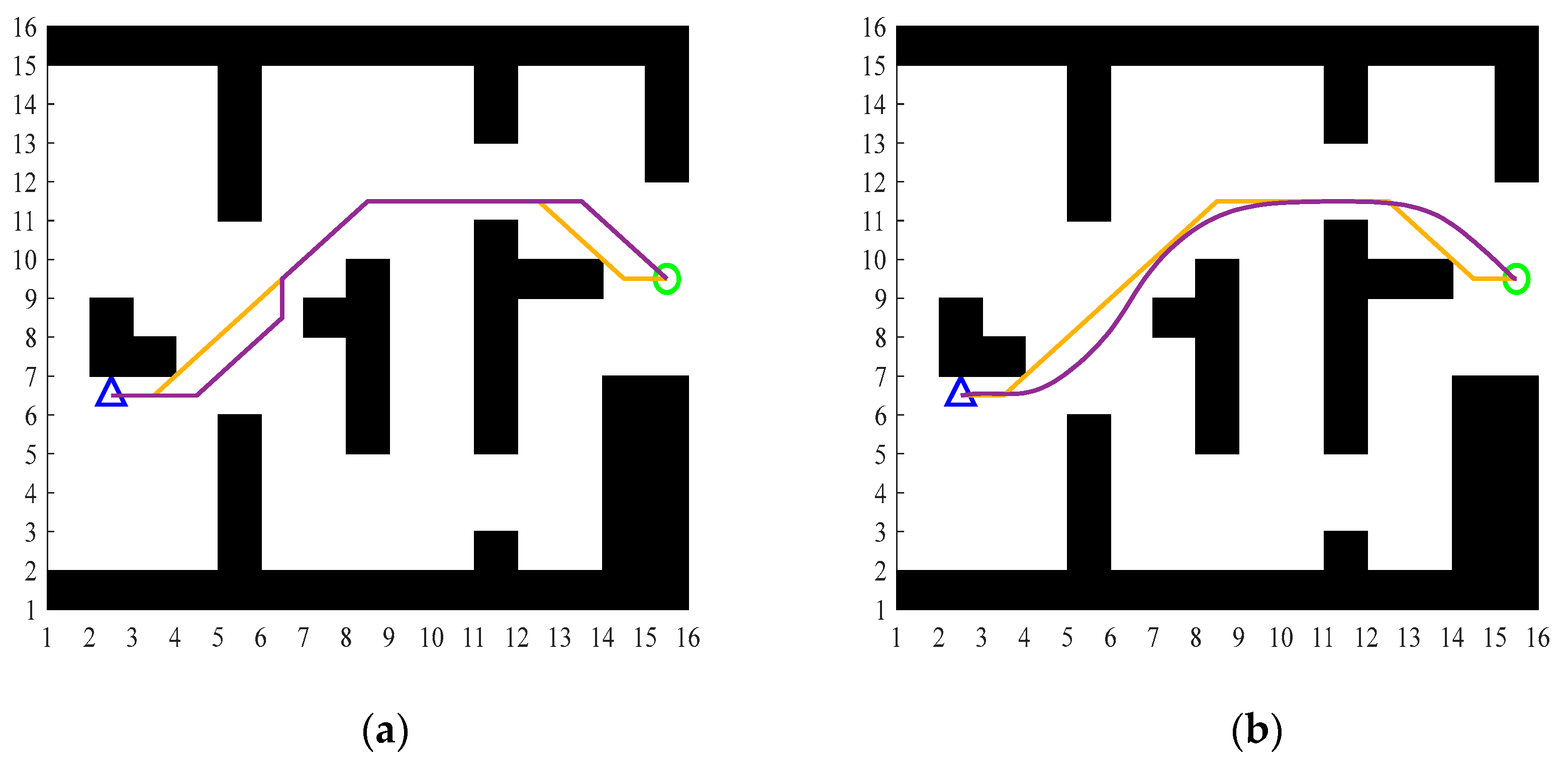
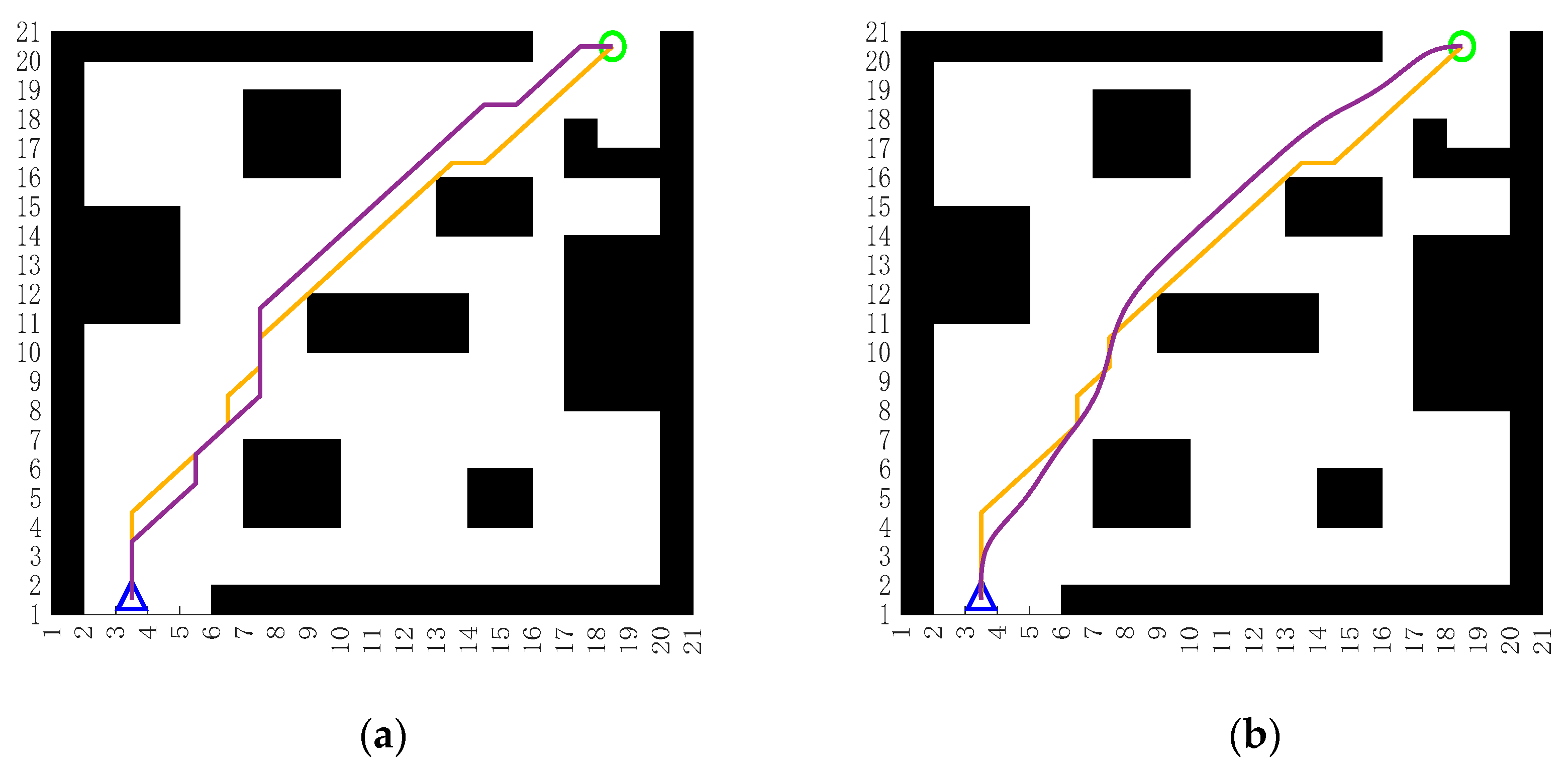
5.1. Improvement of A* Simulation
5.2. Fusion Algorithm Simulation
6. Conclusions and Discussion
- By introducing an obstacle influence degree into the evaluation function and combining dynamic weight coefficients, the algorithm dynamically balances heuristic costs and obstacle avoidance requirements. This enables the robot to proactively avoid obstacle-dense areas during the search process, enhancing path safety in complex environments.
- Discrete grid paths are smoothed using piecewise Bezier curve fitting, significantly reducing path inflection points and sharp turns. This approach satisfies robotic kinematic constraints, ensuring that trajectories are compatible with the robot’s motion capabilities and improving operational stability.
- To tackle the target loss and local minimum issues in the DWA algorithm, a global guidance term and dynamic heading weight are integrated into the evaluation function. This strengthens the algorithm’s target orientation in dynamic environments, ensuring the robot maintains progress toward the goal while executing obstacle avoidance, thus overcoming the traditional DWA’s vulnerability to local optima.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Sun, J.; Cheng, K.W.E. An Inductive Power Transfer system with multiple receivers utilizing Diverted Magnetic Field and two transmitters for IoT-level automatic catering vehicles. IEEE Trans. Magn. 2023, 59, 1–6. [Google Scholar]
- Ye, W. The current situation and future trends of new energy vehicles. Auto Time 2024, 19, 128–130. [Google Scholar]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A survey of path planning algorithms for mobile robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Rachmawati, D.; Gustin, L. Analysis of Dijkstra’s Algorithm and A* Algorithm in Shortest Path Problem. In Proceedings of the 4th International Conference on Computing and Applied Informatics 2019 (ICCAI 2019), Medan, Indonesia, 26–27 November 2019. [Google Scholar]
- Han, Z.; Sun, H.; Huang, J.; Xu, J.; Tang, Y.; Liu, X. Path planning algorithms for smart parking: Review and prospects. World Electr. Veh. J. 2024, 15, 322. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Bai, J.; Bai, Y.; Xi, J.; Zhang, J. Workshop Material Distribution Path Planning Based on Improved A* Algorithm. J. Jilin Univ. Sci. Ed. 2024, 62, 1401–1410. [Google Scholar]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Qi, K.; Li, E.; Mao, Y. Dynamic Path Planning of Mobile Robot Based on Improved A* Algorithm and Adaptive DWA. Data Acquis. Process. 2023, 38, 451–467. [Google Scholar]
- Liu, L.; Wang, B.; Xu, H. Research on Path-Planning Algorithm Integrating Optimization A-Star Algorithm and Artificial Potential Field Method. Electronics 2022, 11, 3660. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, G.; Huang, B.; Fang, Z. Global Optimal Path Planning for Robots Based on Improved A* Algorithm. J. Comput. Appl. 2019, 39, 2517. [Google Scholar]
- Li, X.; Miao, M.; Ran, B.; Zhao, Y.; Zhao, Y.; Li, G. UAV Obstacle Avoidance Path Planning Based on Improved A* Algorithm. Comput. Syst. Appl. 2021, 30, 255–259. [Google Scholar]
- Qi, F.; Wang, X.; Zhang, G. Obstacle avoidance path planning for AGV based on improved A* algorithm. Mach. Tool Hydraul. 2023, 51, 34–39. [Google Scholar]
- Jia, L.; Zeng, S.; Feng, L.; Lv, B.; Yu, Z.; Huang, Y. Global time-varying path planning method based on tunable Bezier curves. Appl. Sci. 2023, 13, 13334. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y. ASL-DWA: An improved A-star algorithm for indoor cleaning robots. IEEE Access 2022, 10, 99498–99515. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Wang, H.; Hao, C.; Zhang, P.; Zhang, M.; Yin, P.; Zhang, Y. Path Planning of Mobile Robots Based on A* Algorithm and Artificial Potential Field Algorithm. China Mech. Eng. 2019, 30, 2489–2496. [Google Scholar]
- Liu, W.; Xu, C.; Zhang, Q.; Wan, Y. Trajectory planning of tire laser engraving orthogonal robot based on an improved multi-objective grasshopper optimization algorithm. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2024, 238, 5851–5864. [Google Scholar] [CrossRef]
- Jiang, H.; Wu, T.; Ren, J.; Li, M.; Xiong, A.; Jia, J. Local Path Planning for Mobile Robots Based on Improved DWA Algorithm. Mach. Des. Res. 2024, 40, 229–234. [Google Scholar]
- Lin, Z.; Yue, M.; Chen, G.; Sun, J. Path planning of mobile robot with PSO-based APF and fuzzy-based DWA subject to moving obstacles. Trans. Inst. Meas. Control 2022, 44, 121–132. [Google Scholar] [CrossRef]
- Yang, H.; Teng, X. Mobile robot path planning based on enhanced dynamic window approach and improved A∗ algorithm. J. Robot. 2022, 1, 2183229. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Zhao, S.; Su, P.; Fu, H.; Niu, H. Hybrid path planning for USV with kinematic constraints and COLREGS based on improved APF-RRT and DWA. Ocean Eng. 2025, 318, 120128. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Function | Search Time (s) | Path Length (m) | Searched Nodes | Minimum Safe Distance (m) | Collision Rate (%) |
|---|---|---|---|---|---|
| Reference [8] | 0.033 | 27.38 | 72 | 0 | 37.5% |
| Traditional | 0.018 | 25.97 | 126 | 0 | 30% |
| Improved | 0.025 | 28.31 | 106 | 0.5 | 10% |
| 10 × 10 Grid Map | 15 × 15 Grid Map | 20 × 20 Grid Map | ||||
|---|---|---|---|---|---|---|
| Length (m) | Time (s) | Length (m) | Time (s) | Length (m) | Time (s) | |
| Traditional | 14.48 | 0.02 | 15.9 | 0.02 | 25.38 | 0.03 |
| Improved | 17.41 | 0.06 | 16.48 | 0.07 | 25.97 | 0.07 |
| Bezier curve | 16.4 | 0.07 | 15.76 | 0.08 | 24.81 | 0.08 |
| Algorithm | 10 × 10 Grid Map CR (%) | 15 × 15 Grid Map CR (%) | 20 × 20 Grid Map CR (%) |
|---|---|---|---|
| Traditional | 45% | 35% | 22% |
| Improved | 30% | 16% | 11.76% |
| Algorithm | Search Time (s) | Path Length (m) | CR (%) |
|---|---|---|---|
| Traditional | 0.047 | 46.94 | 7.89% |
| Reference [8] | 0.044 | 56.21 | 27.45% |
| Improved | 0.131 | 51.04 | 0% |
| Bezier curve | - | 48.69 | - |
| Length (m) | Time (s) | |
|---|---|---|
| Traditional A*&DWA | 40.46 | 260.23 |
| Improved A*&DWA | 34.88 | 178.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Chen, Z. Research on Path Planning for Mobile Charging Robots Based on Improved A* and DWA Algorithms. Electronics 2025, 14, 2318. https://doi.org/10.3390/electronics14122318
Zhu W, Chen Z. Research on Path Planning for Mobile Charging Robots Based on Improved A* and DWA Algorithms. Electronics. 2025; 14(12):2318. https://doi.org/10.3390/electronics14122318
Chicago/Turabian StyleZhu, Wenliang, and Zhufan Chen. 2025. "Research on Path Planning for Mobile Charging Robots Based on Improved A* and DWA Algorithms" Electronics 14, no. 12: 2318. https://doi.org/10.3390/electronics14122318
APA StyleZhu, W., & Chen, Z. (2025). Research on Path Planning for Mobile Charging Robots Based on Improved A* and DWA Algorithms. Electronics, 14(12), 2318. https://doi.org/10.3390/electronics14122318