
Fuzzy-Based Composite Nonlinear Feedback Cruise Control for Heavy-Haul Trains



Abstract
1. Introduction
- (1)
- A novel fuzzy CNF control strategy is proposed for the heavy-haul train cruise control system, ensuring system robustness while improving transient performance.
- (2)
- A MIMO T-S fuzzy model is developed for heavy-haul trains, incorporating slope resistance force. This mitigates model mismatch and enhances the accuracy of the dynamic model.
- (3)
- By taking into account the asymmetric traction/braking force constraints, a non-PDC controller is designed as the linear part of the CNF controller. This approach improves design flexibility and reduces conservativeness compared to existing PDC-based CNF controllers. Additionally, the proposed controller can be directly applied to MIMO systems represented by T-S fuzzy models, broadening the scope of current methodologies that predominantly address SISO systems.
2. Problem Statement
2.1. The Dynamics Model of Heavy-Haul Trains
2.2. The T-S Model of Heavy-Haul Trains
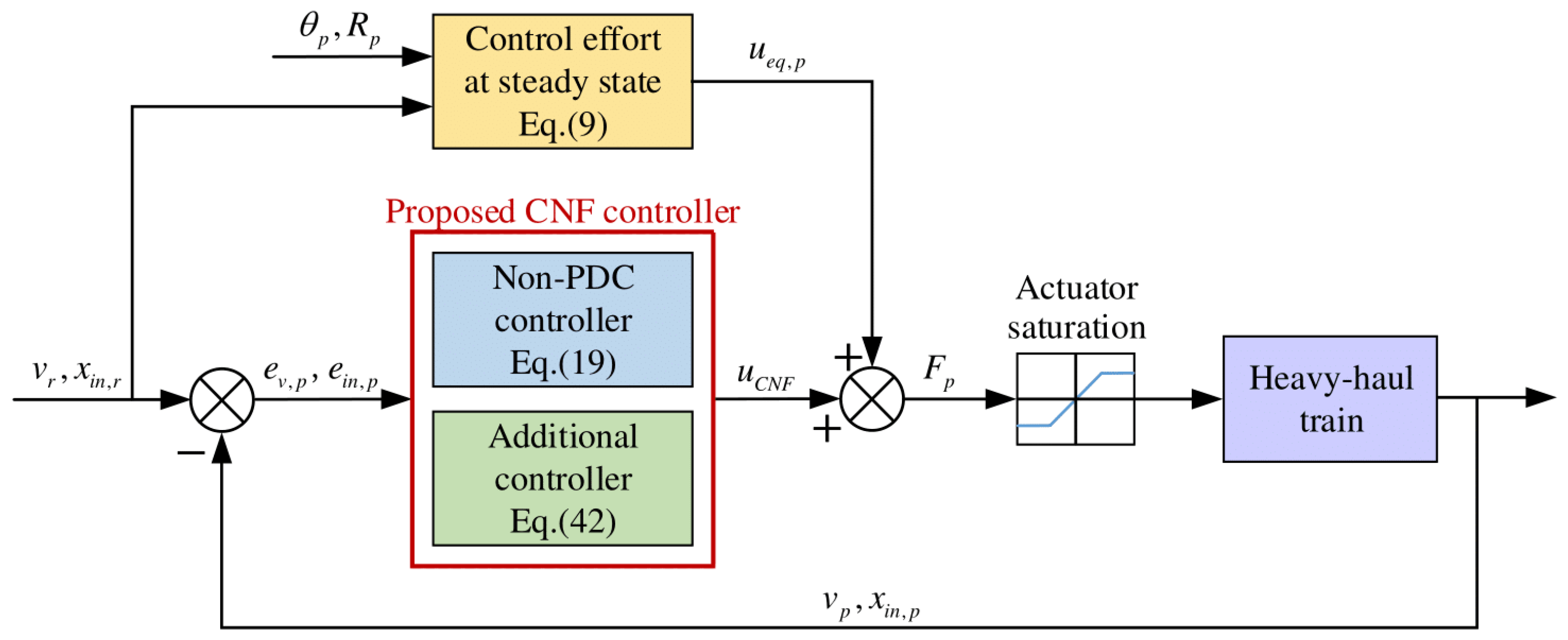
3. Non-PDC Fuzzy-Based CNF Controller Design
3.1. Design of Non-PDC Controller
3.2. Additional Controller Design
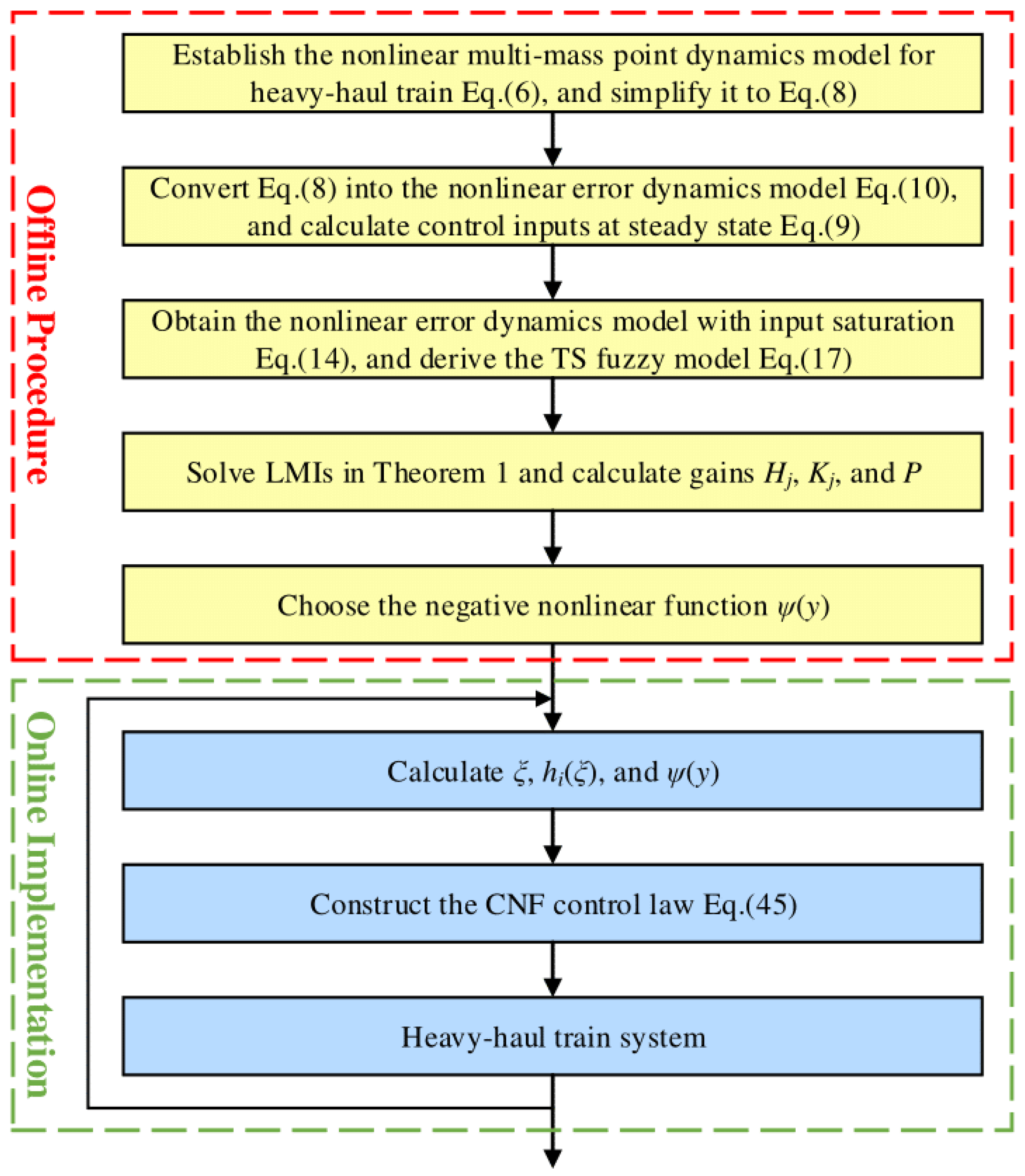
3.3. Stabilization of the Non-PDC Fuzzy-Based CNF Controller
4. Simulation
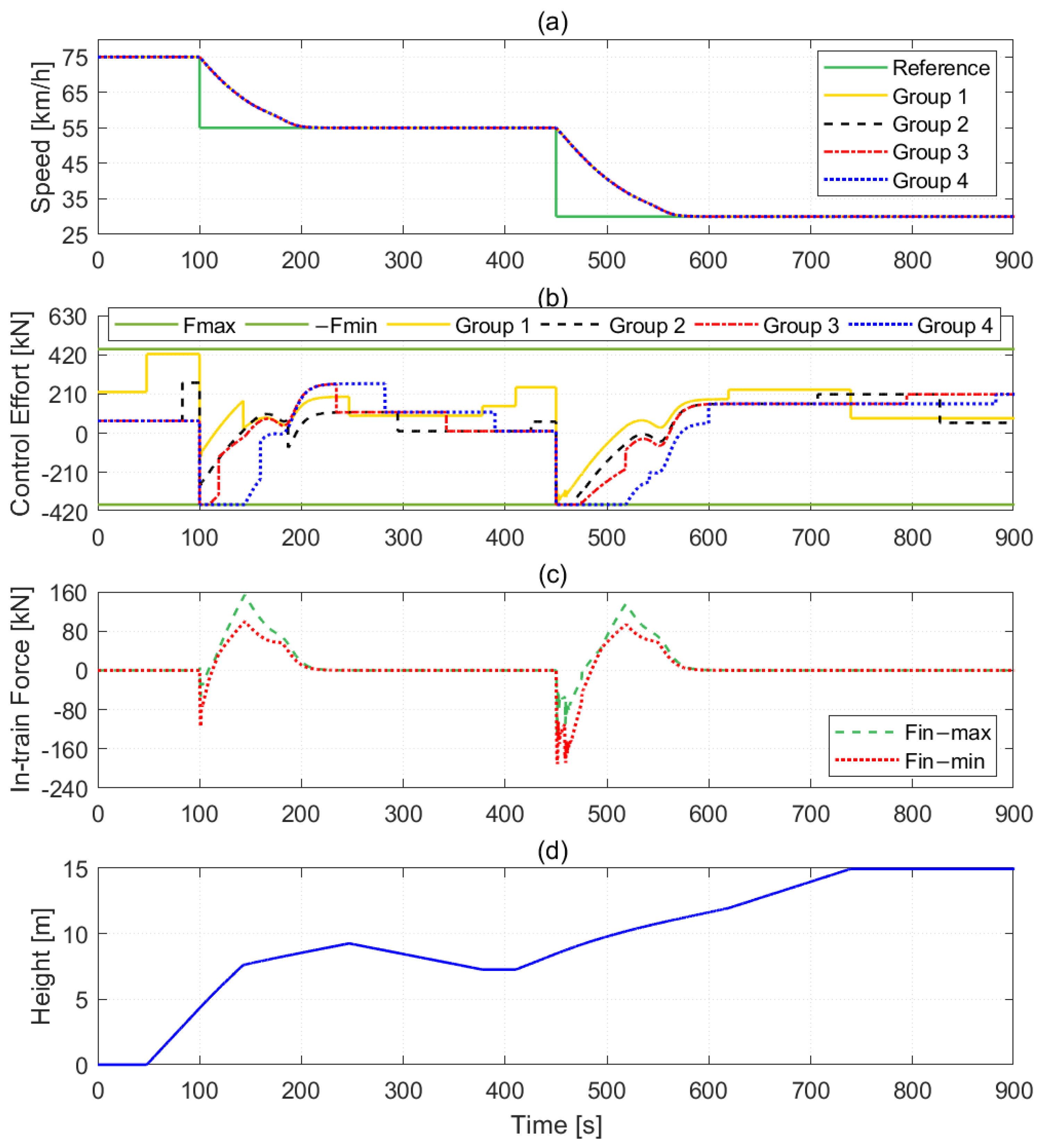
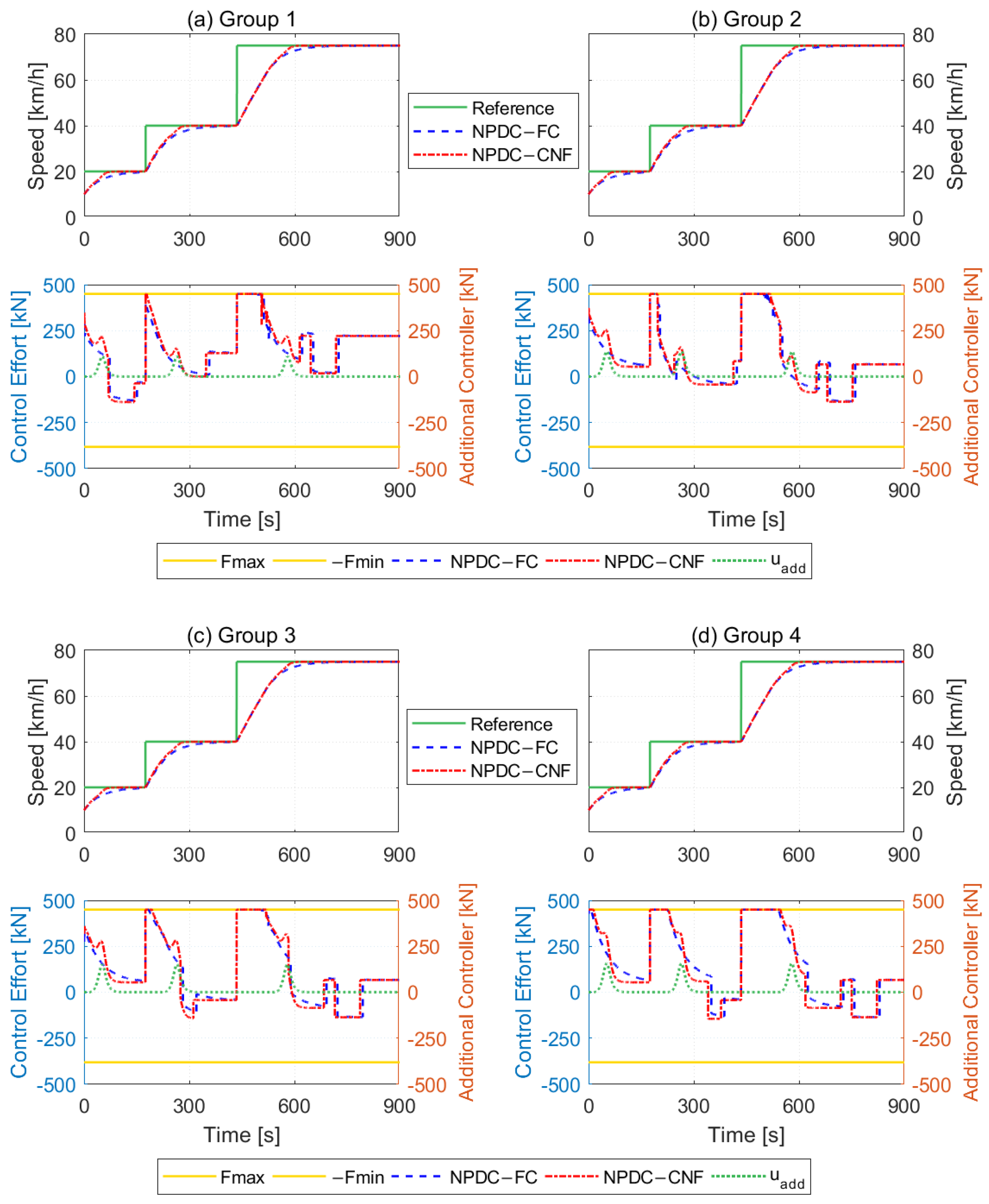
4.1. Performance of the Proposed Method
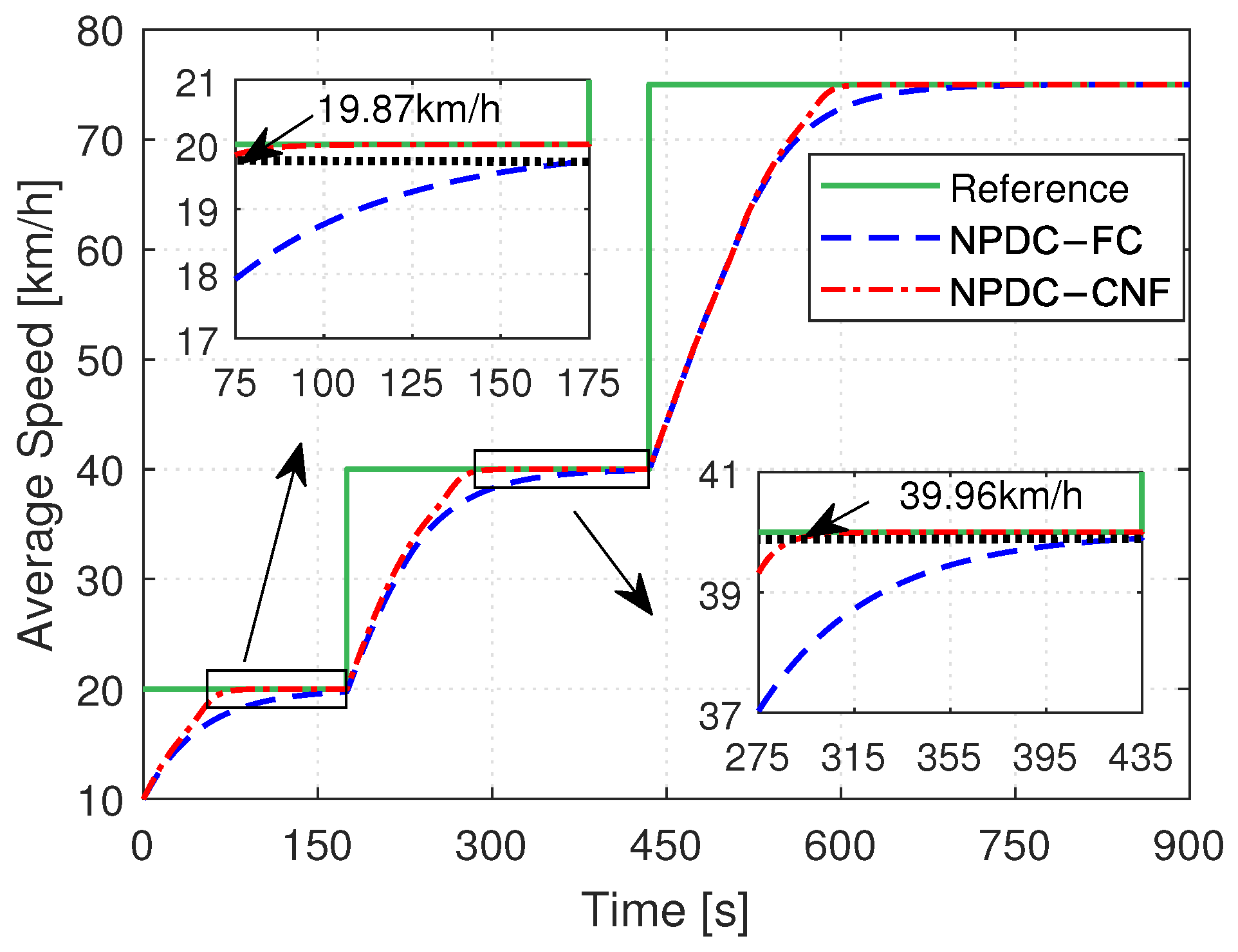
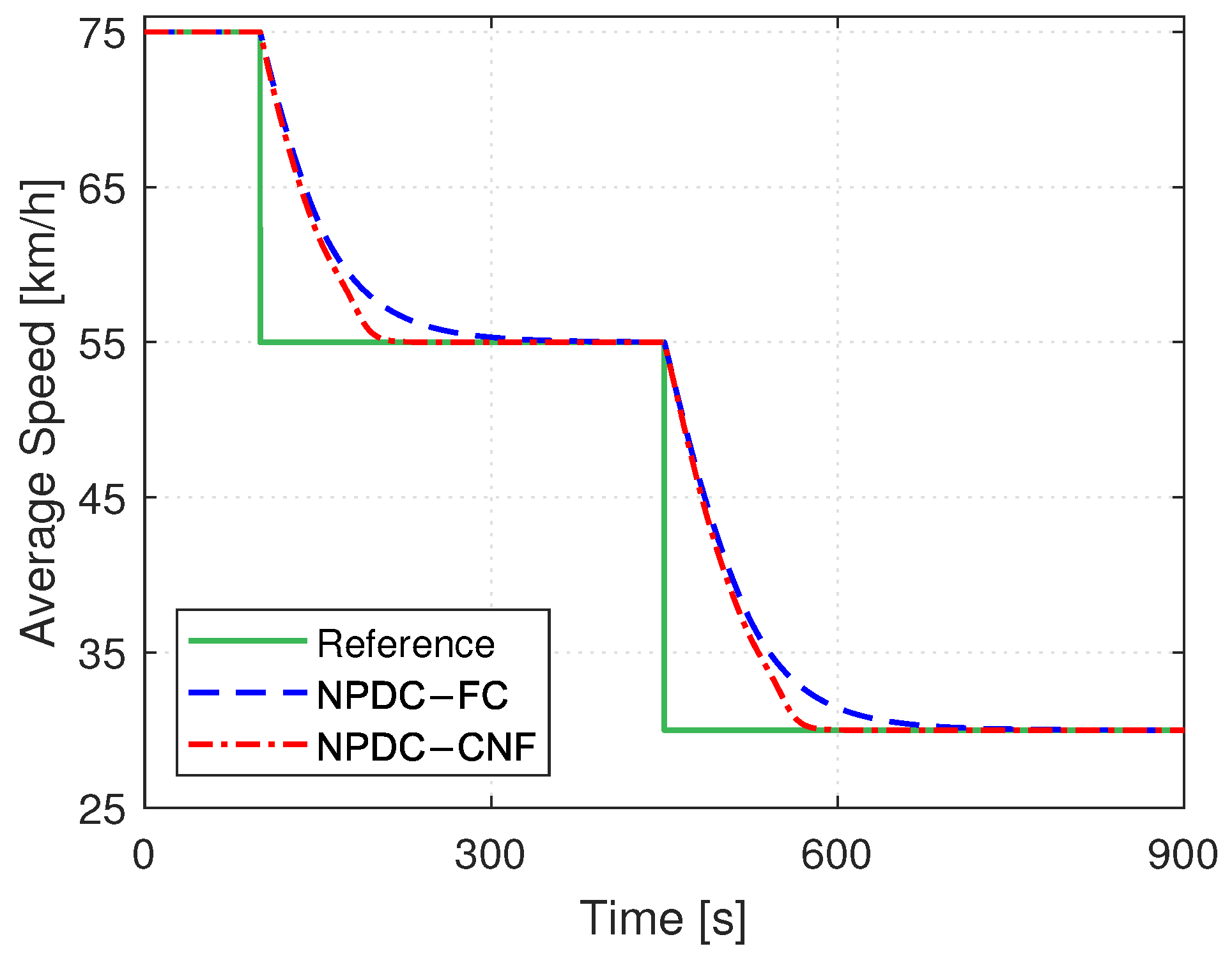
4.2. Comparison with Non-PDC Fuzzy Control Method
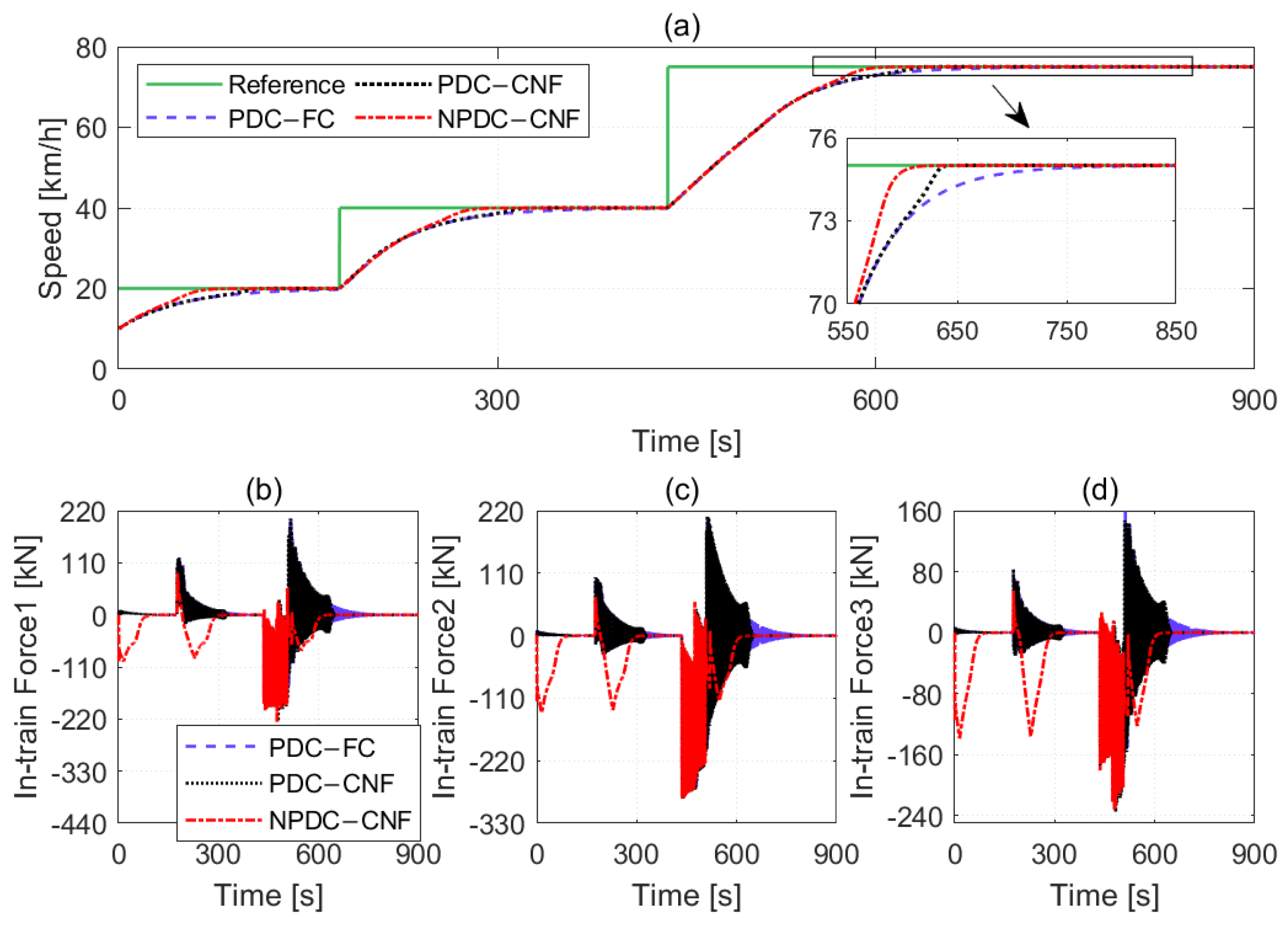
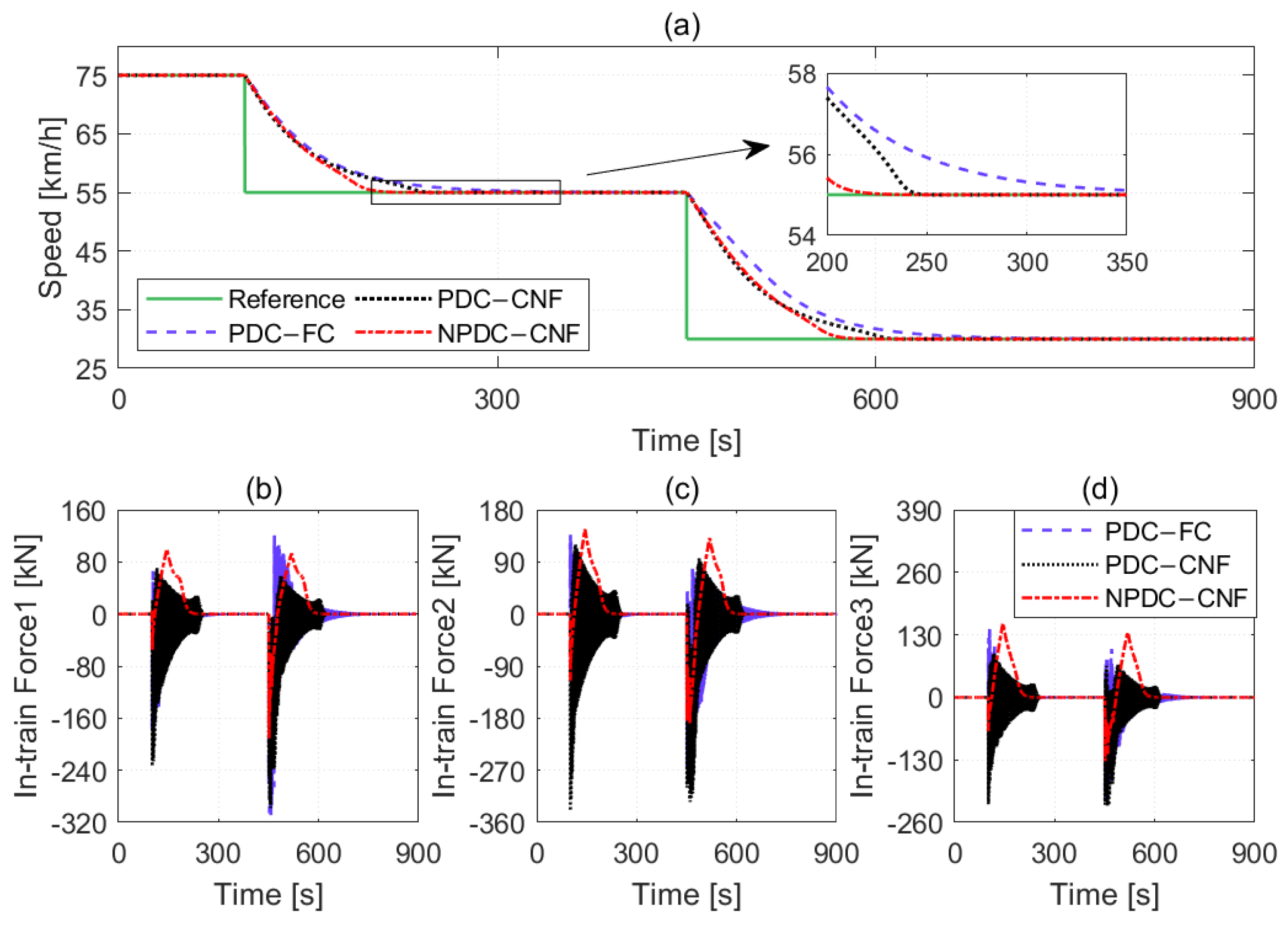
4.3. Comparison with PDC-Based Control Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Su, S.; Cao, Y.; Qin, L.; Liu, W. Robust cruise control for the heavy haul train subject to disturbance and actuator saturation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8003–8013. [Google Scholar] [CrossRef]
- Lu, Q.; He, B.; Wu, M.; Zhang, Z.; Luo, J.; Zhang, Y.; He, R.; Wang, K. Establishment and analysis of energy consumption model of heavy-haul train on large long slope. Energies 2018, 11, 965. [Google Scholar] [CrossRef]
- Liu, W.; Tang, T.; Su, S.; Yin, J.; Cao, Y.; Wang, C. Energy-efficient train driving strategy with considering the steep downhill segment. Processes 2019, 7, 77. [Google Scholar] [CrossRef]
- Zhang, W.; Sun, X.; Yang, S.; Yu, Z.; Wang, W.; Liu, Y. Optimization of speed curve for energy-saving of freight train based on equivalent gradient. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 3438–3443. [Google Scholar] [CrossRef]
- Zhuan, X.; Xia, X. Cruise control scheduling of heavy haul trains. IEEE Trans. Control Syst. Technol. 2006, 14, 757–766. [Google Scholar] [CrossRef]
- Chou, M.; Xia, X. Optimal cruise control of heavy-haul trains equipped with electronically controlled pneumatic brake systems. Control Eng. Pract. 2007, 15, 511–519. [Google Scholar] [CrossRef]
- Gao, K.; Huang, Z.; Wang, J.; Peng, J.; Liu, W. Decentralized control of heavy-haul trains with input constraints and communication delays. Control Eng. Pract. 2013, 21, 420–427. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X. Optimal Operation of Heavy-Haul Trains Equipped with Electronically Controlled Pneumatic Brake Systems Using Model Predictive Control Methodology. IEEE Trans. Control Syst. Technol. 2014, 22, 13–22. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X. Braking-penalized receding horizon control of heavy-haul trains. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1620–1628. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X. Development of an optimal operation approach in the MPC framework for heavy-haul trains. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1391–1400. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T. Robust optimal predictive control of heavy haul train under imperfect communication. ISA Trans. 2019, 91, 52–65. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T. Periodically intermittent cruise control of heavy haul train with uncertain parameters. J. Frankl. Inst. 2019, 356, 6989–7008. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T. Robust efficient cruise control for heavy haul train via the state-dependent intermittent control. Nonlinear Anal. Hybrid Syst. 2020, 38, 100918. [Google Scholar] [CrossRef]
- Zhuan, X.; Xia, X. Speed regulation with measured output feedback in the control of heavy haul trains. Automatica 2008, 44, 242–247. [Google Scholar] [CrossRef]
- Zhu, B.; Xia, X. Nonlinear Trajectory Tracking Control for Heavy-Haul Trains. IFAC-PapersOnLine 2015, 48, 41–46. [Google Scholar] [CrossRef]
- He, J.; Yang, X.; Zhang, C.; Liu, J.; Zhang, Q.; Chen, X. Tracking control via sliding mode for heavy-haul trains with input saturation. Meas. Control 2020, 53, 1720–1729. [Google Scholar] [CrossRef]
- Wang, W.; Cui, K.; Lv, X.; Chang, M.; Gu, L. Automatic Train Operation for Heavy-Haul Trains Based on Adaptive Nonsingular Terminal Sliding Mode Control. In Proceedings of the 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 610–615. [Google Scholar] [CrossRef]
- Huang, Y.; Bai, S.; Meng, X.; Yu, H.; Wang, M. Research on the driving strategy of heavy-haul train based on improved genetic algorithm. Adv. Mech. Eng. 2018, 10, 1687814018791016. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T.; Wang, X.; Xun, J. Intelligent operation of heavy haul train with data imbalance: A machine learning method. Knowl.-Based Syst. 2019, 163, 36–50. [Google Scholar] [CrossRef]
- Liu, W.; Su, S.; Tang, T.; Wang, X. A DQN-based intelligent control method for heavy haul trains on long steep downhill section. Transp. Res. Part C Emerg. Technol. 2021, 129, 103249. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Y.; Tang, T. Fuzzy constrained predictive optimal control of high speed train with actuator dynamics. Discret. Dyn. Nat. Soc. 2016, 2016, 704743. [Google Scholar] [CrossRef]
- Wang, X.; Tang, T. Optimal operation of high-speed train based on fuzzy model predictive control. Adv. Mech. Eng. 2017, 9, 1687814017693192. [Google Scholar] [CrossRef]
- Chen, B.M.; Lee, T.H.; Peng, K.; Venkataramanan, V. Composite nonlinear feedback control for linear systems with input saturation: Theory and an application. IEEE Trans. Automat. Contr. 2003, 48, 427–439. [Google Scholar] [CrossRef]
- Ebrahimi Mollabashi, H.; Mazinan, A.; Hamidi, H. Takagi–Sugeno fuzzy-based CNF control approach considering a class of constrained nonlinear systems. IETE J. Res. 2019, 65, 872–886. [Google Scholar] [CrossRef]
- Hu, C.; Chen, Y.; Wang, J. Fuzzy observer-based transitional path-tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3078–3088. [Google Scholar] [CrossRef]
- TB/T 1407.1-2018; Railway Train Traction Calculation Part 1: Trains with Locomotives. National Railway Administration of People’s Republic of China: Beijing, China, 2018. (In Chinese)
- Vafamand, N.; Asemani, M.H.; Khayatiyan, A. A robust L1 controller design for continuous-time TS systems with persistent bounded disturbance and actuator saturation. Eng. Appl. Artif. Intell. 2016, 56, 212–221. [Google Scholar] [CrossRef]
- Tuan, H.D.; Apkarian, P.; Narikiyo, T.; Yamamoto, Y. Parameterized linear matrix inequality techniques in fuzzy control system design. IEEE Trans. Fuzzy Syst. 2001, 9, 324–332. [Google Scholar] [CrossRef]
- Duan, Z.; Ghous, I.; Shen, J. Fault detection observer design for discrete-time 2-D TS fuzzy systems with finite-frequency specifications. Fuzzy Sets Syst. 2020, 392, 24–45. [Google Scholar] [CrossRef]
- Cao, Y.Y.; Lin, Z. Robust stability analysis and fuzzy-scheduling control for nonlinear systems subject to actuator saturation. IEEE Trans. Fuzzy Syst. 2003, 11, 57–67. [Google Scholar] [CrossRef]
- Vazani, A.; Ghaffari, V. An innovative algorithm for tuning of composite nonlinear feedback control in continuous-time systems. Asian J. Control 2023, 25, 2295–2304. [Google Scholar] [CrossRef]
- Zhao, L.; Li, L. Robust stabilization of T–S fuzzy discrete systems with actuator saturation via PDC and non-PDC law. Neurocomputing 2015, 168, 418–426. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Locomotive mass | 184 | t |
| Wagon mass | 20 | t |
| 0.9640 | ||
| 0.0047 | ||
| N/kN | ||
| k | kN/m | |
| 450 | kN | |
| 363 | kN |
| Maneuver | Running Time (s) | Settling Time (s) (2% Error Band) | Time to Equilibrium Point (s) | ||
|---|---|---|---|---|---|
| NPDC CNF | NPDC FC | NPDC CNF | NPDC FC | ||
| Maneuver 1 | 0–175 | 72.8 | 156.3 | 105.6 | >175 |
| 175–435 | 104.6 | 166.9 | 143.4 | >260 | |
| 435–900 | 154.4 | 198.7 | 198.1 | 391.7 | |
| Maneuver 2 | 0–100 | 0 | 0 | 0 | 0 |
| 100–450 | 100.4 | 161.7 | 158.3 | 356.1 | |
| 450–900 | 117.5 | 172.6 | 158.3 | 356.1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Wang, J.; Chen, Z.; Xu, Y.; Zhou, Z.; Liu, Z. Fuzzy-Based Composite Nonlinear Feedback Cruise Control for Heavy-Haul Trains. Electronics 2025, 14, 2317. https://doi.org/10.3390/electronics14122317
Zhang Q, Wang J, Chen Z, Xu Y, Zhou Z, Liu Z. Fuzzy-Based Composite Nonlinear Feedback Cruise Control for Heavy-Haul Trains. Electronics. 2025; 14(12):2317. https://doi.org/10.3390/electronics14122317
Chicago/Turabian StyleZhang, Qian, Jia Wang, Zhiqiang Chen, Yougen Xu, Zhiguo Zhou, and Zhiwen Liu. 2025. "Fuzzy-Based Composite Nonlinear Feedback Cruise Control for Heavy-Haul Trains" Electronics 14, no. 12: 2317. https://doi.org/10.3390/electronics14122317
APA StyleZhang, Q., Wang, J., Chen, Z., Xu, Y., Zhou, Z., & Liu, Z. (2025). Fuzzy-Based Composite Nonlinear Feedback Cruise Control for Heavy-Haul Trains. Electronics, 14(12), 2317. https://doi.org/10.3390/electronics14122317