
Joint Sparse Estimation Method for Array Calibration Based on Fast Iterative Shrinkage-Thresholding Algorithm


Abstract
1. Introduction
2. Materials and Methods
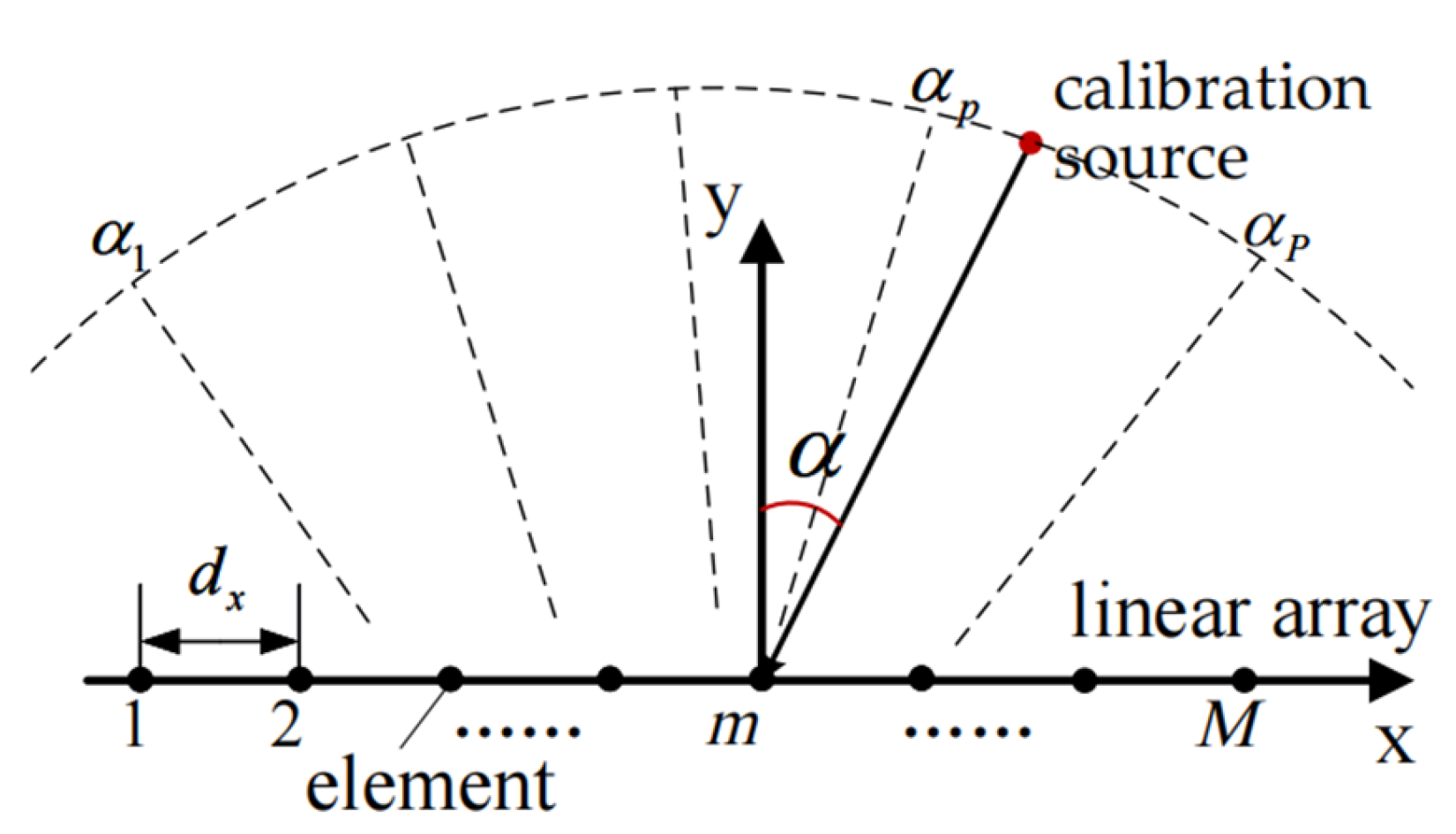
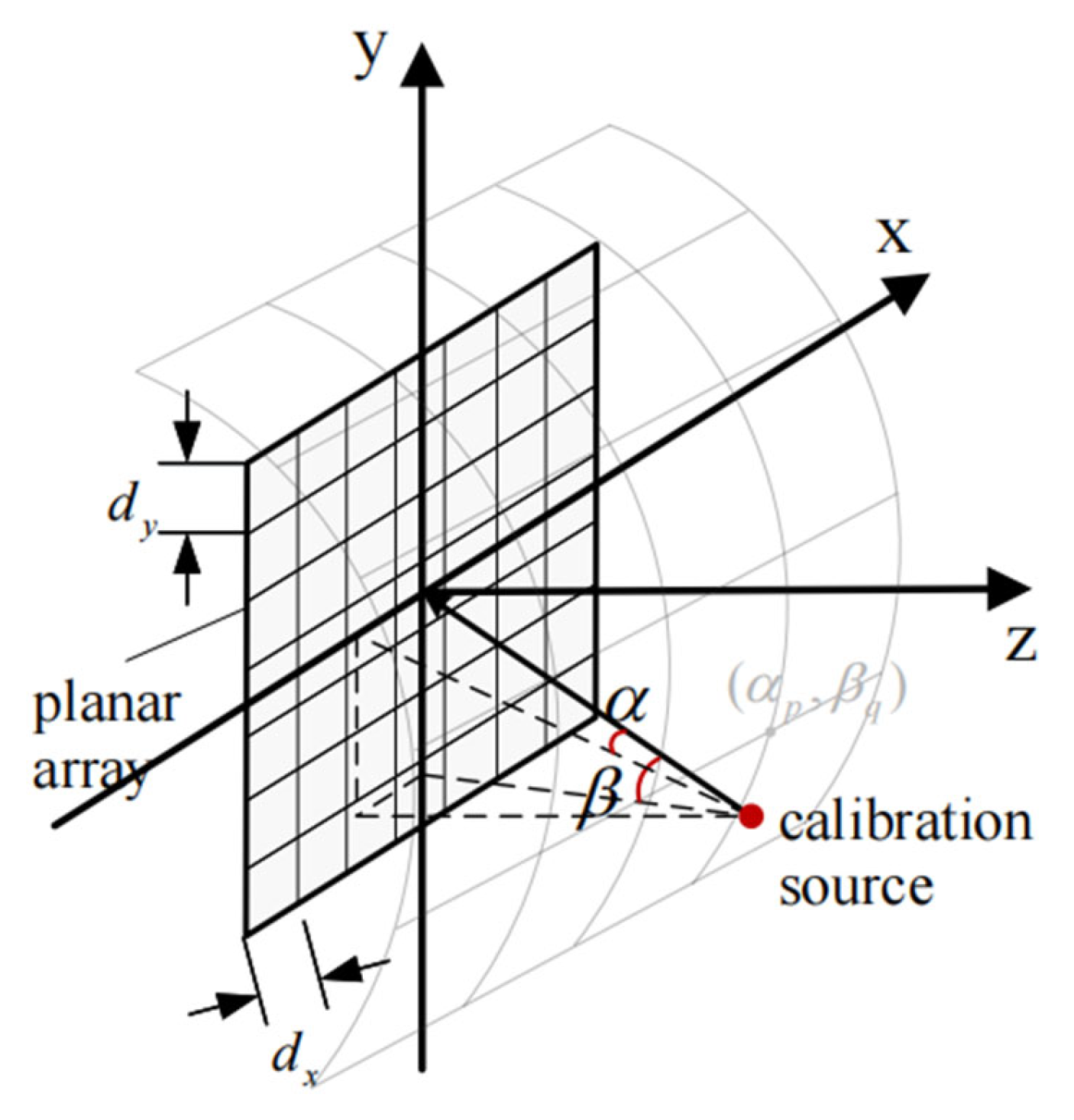
2.1. Array Calibration Signal Model
2.2. Joint Sparse Estimation of DOA
| Algorithm 1. Joint Sparse DOA Estimation |
| Require: 1: array response vector x; 2: joint observation matrix; 3: initialized joint estimation vector; Ensure: 1: initialize y(1) = x(1) = x, r(0) = 0, t(1) = 1, k = 1; 2: ▷ solve the optimization iteratively, using the residual norm as the stopping condition for iteration: 3: while ||y(k) − u(k—1)||2 > ξ do 4: ▷ compute complex gradient and Moreau envelope gradient: 5: ∇f (y(k)) = ∇g(y(k)) + ∇hη(y(k)) = ΦH (Φy(k)− x) + (y(k) − Phη(y(k))/η); 6: determine gradient descent step size by line search, µ (k) = LinearSearch(y(k)); 7: calculate gradient descent, r (k) = y(k) + µ(k)∇f (y(k)); 8: apply two-dimensional convex cone projection constraint, u(k+1) = P(r(k+1)); 9: ; 10: update Nesterov intermediate variable, ; 11: k = k + 1; 12: end while |
2.3. Spatial Domain Filtering Gain and Phase Estimation and Calibration
3. Results
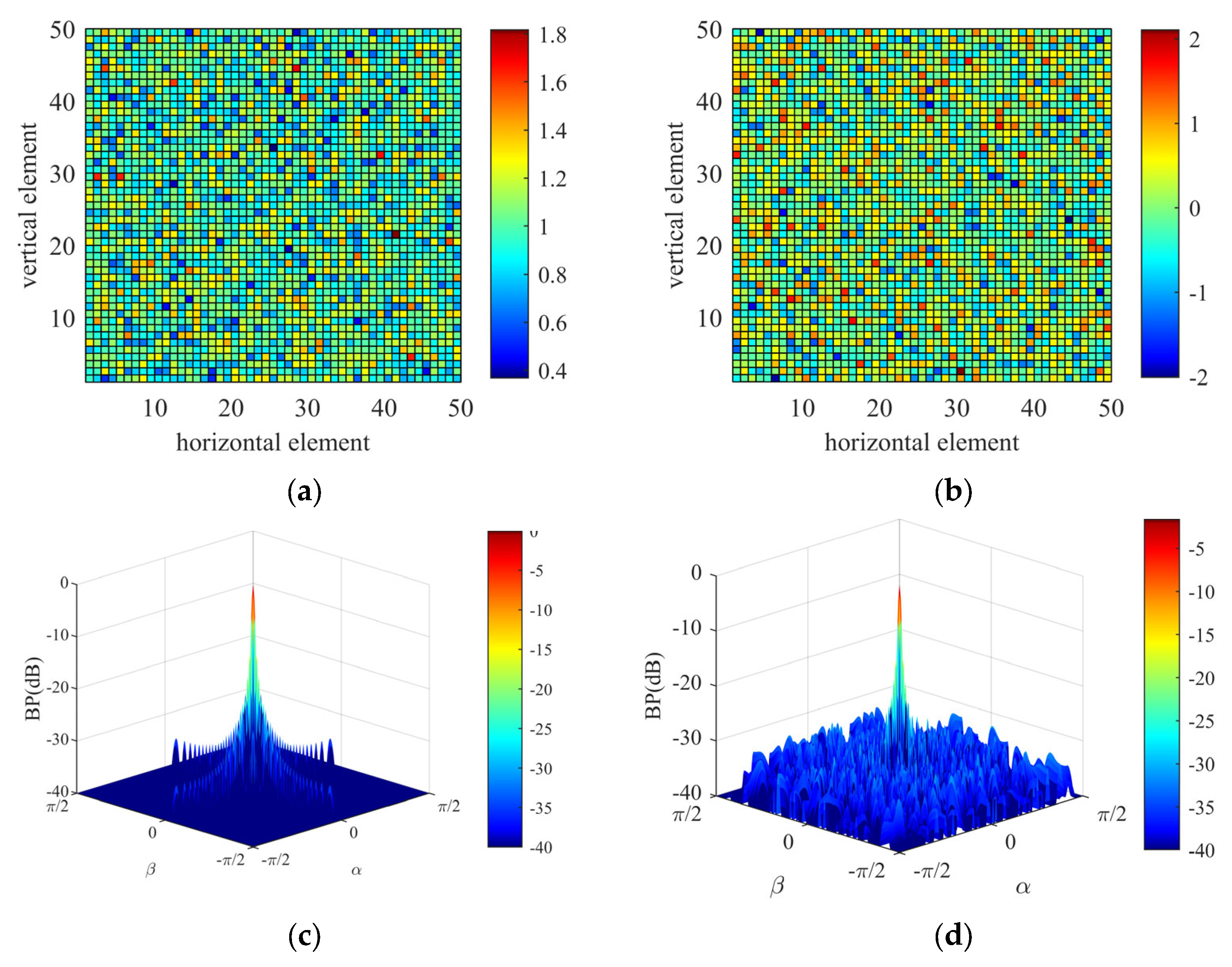
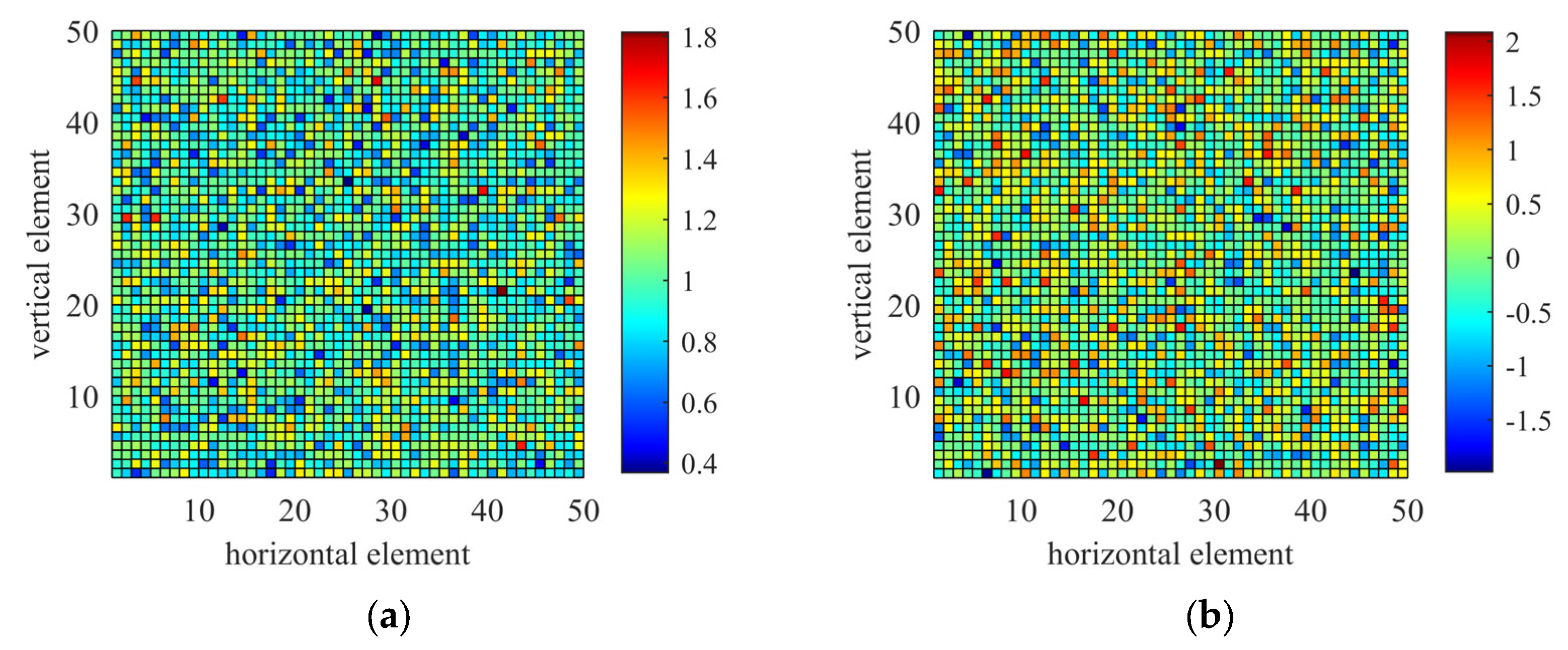
3.1. Calibration Performance of the Planar Array
3.2. Analysis of the Impact of the Gain Phase Error Value and Signal-to-Noise Ratio on the Performance of Array Calibration Methods
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FISTA | fast iterative shrinkage-thresholding algorithm |
| DOA | direction of arrival |
| JSC | joint sparse calibration |
| RMSE | root mean squared error |
| SNR | signal-to-noise ratio |
| SMF | spatially matched filtering |
| TSI | three-step iterative |
| CS | compressed sensing |
| BCS | Bayesian compressed sensing |
| CVX | convex optimization |
| MUSIC | multiple signal classification |
References
- Rockah, Y.; Schultheiss, P. Array shape calibration using sources in unknown locations–Part I: Far-field sources. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 286–299. [Google Scholar] [CrossRef]
- Rockah, Y.; Schultheiss, P. Array shape calibration using sources in unknown locations–Part II: Near-field sources and estimator implementation. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 724–735. [Google Scholar] [CrossRef]
- Rockah, Y.; Messer, H.; Schultheiss, P. Localization performance of arrays subject to phase errors. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 402–410. [Google Scholar] [CrossRef]
- LI, Y.; ER, M.H. Theoretical analyses of gain and phase error calibration with optimal implementation for linear equispaced array. IEEE Trans. Signal Process. 2006, 54, 712–723. [Google Scholar]
- Fuhrmann, D.R. Estimation of sensor gain and phase. IEEE Trans. Signal Process. 1994, 42, 77–87. [Google Scholar] [CrossRef]
- Ng, B.C.; See, C. Sensor-array calibration using a maximum-likelihood approach. IEEE Trans. Antennas Propag. 1996, 44, 827–835. [Google Scholar]
- Boonstra, A.J.; Van der Veen, A.J. Gain calibration methods for radio telescope arrays. IEEE Trans. Signal Process. 2003, 51, 25–38. [Google Scholar] [CrossRef]
- Flanagan, B.P.; Bell, K.L. Array self-calibration with large sensor position errors. Signal Process. 2001, 81, 2201–2214. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Yuan, L.; Jiang, R.; Chen, Y. Gain and Phase Autocalibration of Large Uniform Rectangular Arrays for Underwater 3-D Sonar Imaging Systems. IEEE J. Ocean. Eng. 2014, 39, 458–471. [Google Scholar] [CrossRef]
- Wang, F.; Jiang, R.; Tian, X.; Liu, X.; Jiang, S.; Gu, B.; Chen, Y. An Efficient Near-Field Model Gain-Phase Self-Calibration Method for Uniform Rectangular Arrays. IEEE J. Ocean. Eng. 2022, 47, 1129–1142. [Google Scholar] [CrossRef]
- Wu, Y.; Rhodes, S.; Satorius, E.H. Direction of arrival estimation via extended phase interferometry. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 375–381. [Google Scholar]
- Hou, Y.; Wang, W. Active Frequency Diverse Array Counteracting Interferometry-Based DOA Reconnaissance. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1922–1925. [Google Scholar] [CrossRef]
- Florio, A.; Avitabile, G.; Coviello, G. A Linear Technique for Artifacts Correction and Compensation in Phase Interferometric Angle of Arrival Estimation. Sensors 2022, 22, 1427. [Google Scholar] [CrossRef]
- Florio, A.; Bnilam, N.; Talarico, C.; Crosta, P.; Avitabile, G.; Coviello, G. LEO-Based Coarse Positioning Through Angle-of-Arrival Estimation of Signals of Opportunity. IEEE Access 2024, 12, 17446–17459. [Google Scholar] [CrossRef]
- Terada, T.; Nishimura, T.; Ogawa, Y.; Ohgane, T.; Yamada, H. DOA Estimation for Multi-Band Signal Sources Using Compressed Sensing Techniques with Khatri-Rao Processing. IEICE Trans. Commun. 2014, 97, 2110–2117. [Google Scholar] [CrossRef]
- Jie, X.; Zheng, B.; Gu, B. Gain and Phase Calibration of Uniform Rectangular Arrays Based on Convex Optimization and Neural Networks. Electronics 2022, 11, 718. [Google Scholar] [CrossRef]
- Li, S.; Ma, Y.; Gao, Y.; Li, J. DOA Estimation Based on Bayesian Compressive Sensing. Wirel. Satell. Syst. PTI 2019, 280, 630–639. [Google Scholar]
- Feng, X.; Zhang, X.B.; Song, R.P.; Wang, J.F.; Sun, H.X.; Esmaiel, H. Direction of arrival estimation under Class A modelled noise in shallow water using variational Bayesian inference method. IET Radar Sonar Navig. 2022, 16, 1503–1515. [Google Scholar] [CrossRef]
- Ogut, M.; Bosch-Lluis, X.; Reising, S.C. Deep Learning Calibration of the High-Frequency Airborne Microwave and Millimeter-Wave Radiometer (HAMMR) Instrument. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3391–3399. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, A.; Chen, X.; Wang, P.; Wang, Y.; Yang, H. A Deep Learning Approach for Blind Drift Calibration of Sensor Networks. IEEE Sens. J. 2017, 17, 4158–4171. [Google Scholar] [CrossRef]
- Goodman, J.; Salmond, D.; Davis, C.; Acosta, C. Ambiguity Resolution in Direction of Arrival Estimation using Mixed Integer Optimization and Deep Learning. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 317–322. [Google Scholar]
- Ahmed, A.M.; Thanthrige, U.S.K.P.M.; El Gamal, A.; Sezgin, A. Deep Learning for DOA Estimation in MIMO Radar Systems via Emulation of Large Antenna Arrays. IEEE Commun. Lett. 2021, 25, 1559–1563. [Google Scholar] [CrossRef]
- Wylie, M.R.; Roy, S.; Messer, H. Joint DOA estimation and phase calibration of linear equispaced (LES) arrays. IEEE Trans. Signal Process. 1994, 42, 3449–3459. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, Y.; Liu, X.; Jiang, R.; Shen, B. A Bayesian compressive sensing-based planar array diagnosis approach from near-field measurements. IEEE Antennas Wirel. Propag. Lett. 2020, 20, 249–253. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, L.; Li, Y.; Jing, X.; Truong, T. A sparse-based approach for DOA estimation and array calibration in uniform linear array. IEEE Sens. J. 2016, 16, 6018–6027. [Google Scholar] [CrossRef]
- Sijtsma, P. CLEAN based on spatial source coherence. Int. J. Aeroacoustics 2007, 6, 357–374. [Google Scholar] [CrossRef]
- Berestesky, P.; Attia, E.H. Sidelobe leakage reduction in random phase diversity radar using coherent CLEAN. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2426–2435. [Google Scholar] [CrossRef]
- Yang, T. Deconvolved conventional beamforming for a horizontal line array. IEEE J. Ocean. Eng. 2017, 43, 160–172. [Google Scholar] [CrossRef]
- Zhou, T.; Huang, J.; Du, W.; Shen, J.; Yuan, W. 2-D Deconvolved conventional beamforming for a planar array. Circuits Syst. Signal Process. 2021, 40, 5572–5593. [Google Scholar] [CrossRef]
- Mei, J.; Pei, Y.; Zakharov, Y.; Sun, D.; Ma, C. Improved underwater acoustic imaging with non-uniform spatial resampling RL deconvolution. IET Radar Sonar Navig. 2020, 14, 1697–1707. [Google Scholar] [CrossRef]
- Wu, Q.; Fang, S. Structured Bayesian compressive sensing with spatial location dependence via variational Bayesian inference. Digit. Signal Process. 2017, 71, 95–107. [Google Scholar] [CrossRef]
- Liu, J.; Wu, Q.; Amin, M.G. Multi-Task Bayesian compressive sensing exploiting signal structures. Signal Process. 2021, 178, 107804. [Google Scholar] [CrossRef]
- Chu, Z.; Chen, C.; Yang, Y.; Shen, L.; Xi, C. Improvement of Fourier-based fast iterative shrinkage thresholding deconvolution algorithm for acoustic source identification. Appl. Acoust. 2017, 123, 64–72. [Google Scholar] [CrossRef]
- Shen, L.; Chu, Z.; Tan, L.; Chen, D.; Ye, F. Improving the sound source identification performance of sparsity constrained deconvolution beamforming utilizing SFISTA. Shock Vib. 2020, 2020, 1482812. [Google Scholar] [CrossRef]
- Xiang, J.; Dong, Y.; Yang, Y. FISTA-Net: Learning a fast iterative shrinkage thresholding network for inverse problems in imaging. IEEE Trans. Med. Imaging 2021, 40, 1329–1339. [Google Scholar] [CrossRef]
- Chen, F.; Xiao, Y.; Yu, L.; Chen, L.; Zhang, C. Extending FISTA to FISTA-Net: Adaptive reflection parameters fitting for the deconvolution-based sound source localization in the reverberation environment. Mech. Syst. Signal Process. 2024, 210, 111130. [Google Scholar] [CrossRef]
- Zhang, J.; Chu, P.; Liao, B. DOA Estimation in Impulsive Noise Based on FISTA Algorithm. Remote Sens. 2023, 15, 565. [Google Scholar] [CrossRef]
- Liu, D.; Zhao, Y. Two-Dimensional DOA Estimation via Matrix Completion and Sparse Matrix Recovery for Coprime Planar Array. IEEE Trans. Veh. Technol. 2023, 72, 14127–14140. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. Smoothing and first order methods: A unified framework. SIAM J. Optim. 2012, 22, 557–580. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Index | Gain Error Value (Normalized) | Phase Error Value (°) | ||||
|---|---|---|---|---|---|---|
| Error | Estimated | Estimation Bias | Error | Estimated | Estimation Bias | |
| (5, 5) | 1.0308 | 1.0278 | −0.0030 | −23.5977 | −24.8616 | −1.2639 |
| (10, 10) | 1.0584 | 1.0587 | −0.0003 | 3.3011 | 2.0089 | −1.2922 |
| (15, 15) | 0.8957 | 0.8983 | 0.0026 | −28.7070 | −26.9317 | 1.7743 |
| (20, 20) | 1.0154 | 1.0123 | −0.0031 | −53.0579 | −51.3620 | 1.6959 |
| (25, 25) | 0.8333 | 0.8309 | −0.0024 | 23.2944 | 23.2862 | −0.0082 |
| (30, 30) | 1.4918 | 1.4877 | −0.0041 | −54.7659 | −54.0988 | 0.6671 |
| (35, 35) | 1.1045 | 1.1024 | −0.0021 | 19.9314 | 18.3286 | −1.6027 |
| (40, 40) | 1.3969 | 1.3979 | 0.0010 | −0.7911 | 0.3499 | 1.1410 |
| (45, 45) | 1.1263 | 1.1261 | −0.0002 | 0.3017 | −1.7904 | −2.0921 |
| (50, 50) | 0.9297 | 0.9297 | 0.0006 | −35.2634 | −33.7776 | 1.4858 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, B.; Liu, X.; Wang, F.; Gao, X.; Zhou, F. Joint Sparse Estimation Method for Array Calibration Based on Fast Iterative Shrinkage-Thresholding Algorithm. Electronics 2025, 14, 2165. https://doi.org/10.3390/electronics14112165
Gu B, Liu X, Wang F, Gao X, Zhou F. Joint Sparse Estimation Method for Array Calibration Based on Fast Iterative Shrinkage-Thresholding Algorithm. Electronics. 2025; 14(11):2165. https://doi.org/10.3390/electronics14112165
Chicago/Turabian StyleGu, Boxuan, Xuesong Liu, Fei Wang, Xiang Gao, and Fan Zhou. 2025. "Joint Sparse Estimation Method for Array Calibration Based on Fast Iterative Shrinkage-Thresholding Algorithm" Electronics 14, no. 11: 2165. https://doi.org/10.3390/electronics14112165
APA StyleGu, B., Liu, X., Wang, F., Gao, X., & Zhou, F. (2025). Joint Sparse Estimation Method for Array Calibration Based on Fast Iterative Shrinkage-Thresholding Algorithm. Electronics, 14(11), 2165. https://doi.org/10.3390/electronics14112165