

Blind Signal Separation with Deep Residual Networks for Robust Synthetic Aperture Radar Signal Processing in Interference Electromagnetic Environments


Abstract
1. Introduction
- (1)
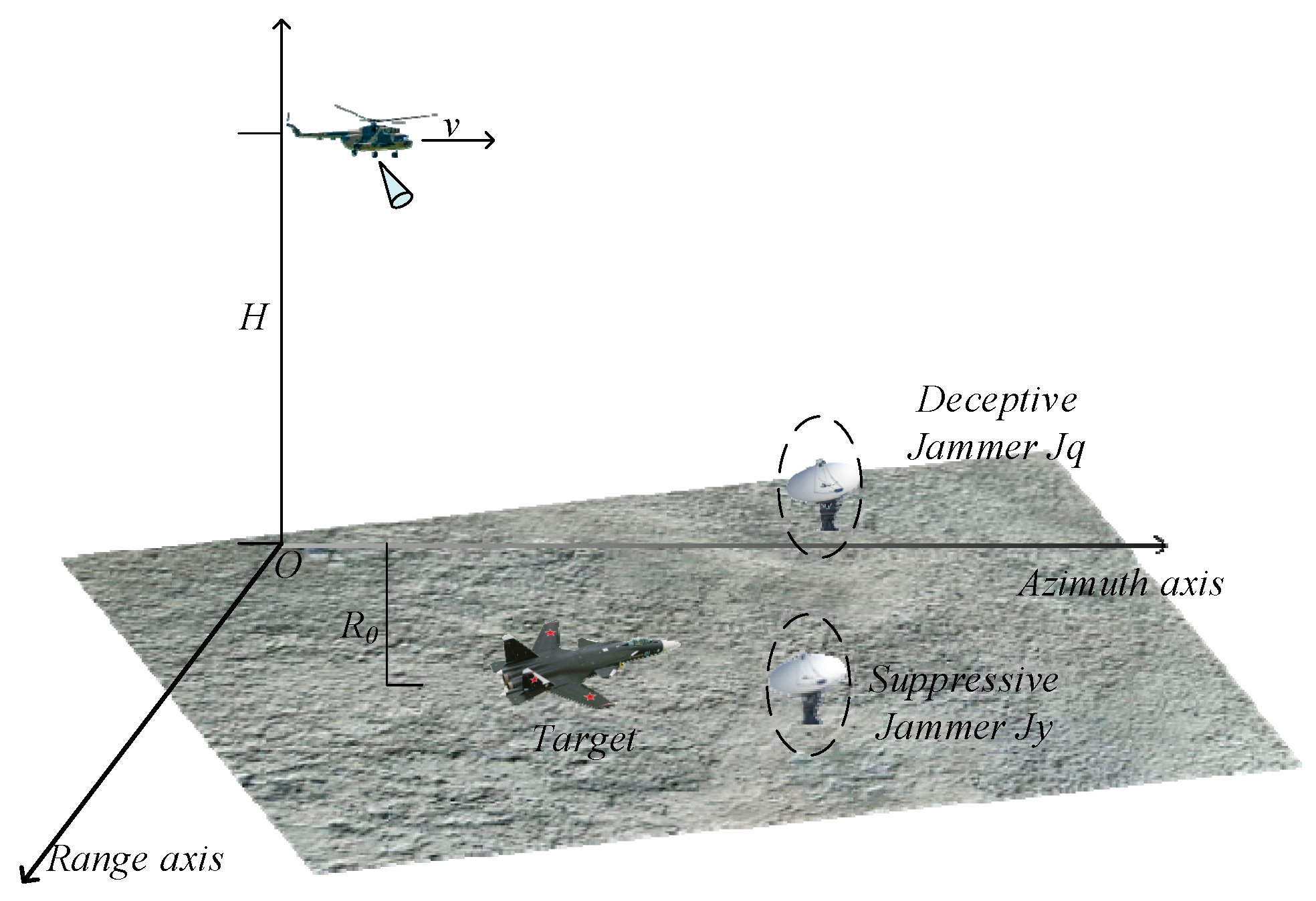
- The signal model and geometric imaging model for complex multi-electromagnetic interference environments are developed. Similarly, the BSS methods are introduced to the problem of complex multi-electromagnetic interference suppression.
- (2)
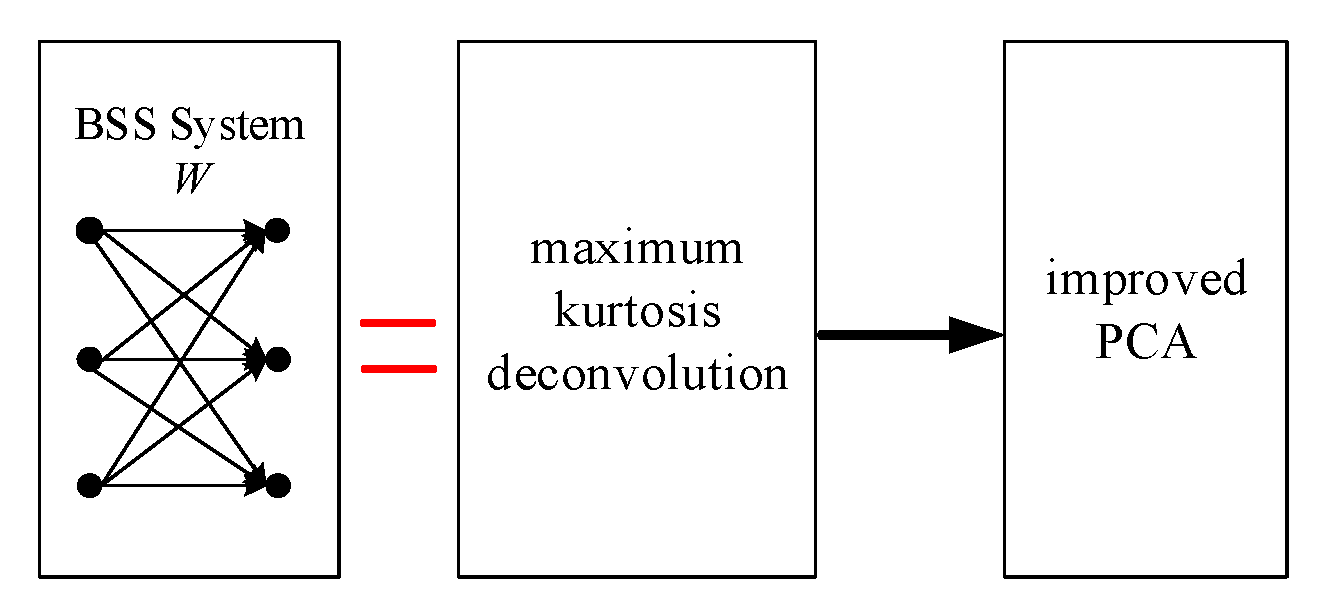
- An airborne SAR multi-electromagnetic interference suppression algorithm using maximum kurtosis deconvolution and improved PCA is proposed. This algorithm addresses the effect of Gaussian white noise on the separation results of the BSS algorithm during channel transmission. Similarly, this algorithm proposes an improved PCA algorithm that utilizes the combination of two PCA algorithms to transform a common signal processing problem into a simple matrix computation.
- (3)
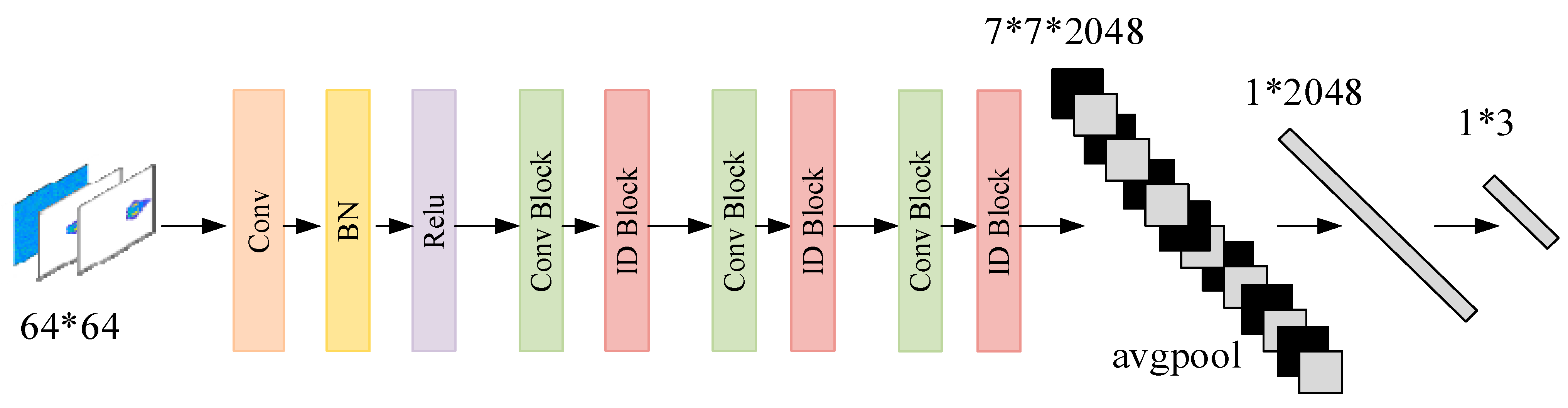
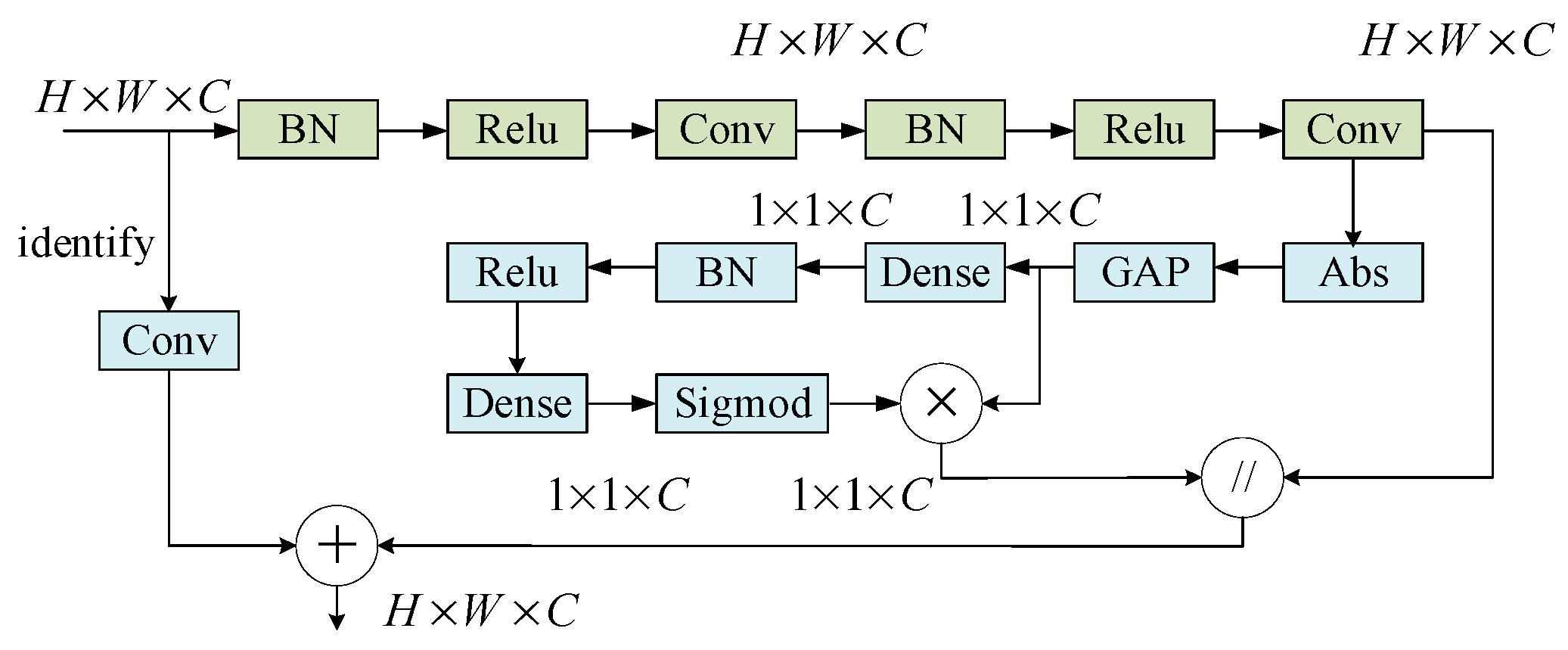
- To address the shortcomings of existing BSS methods, a deep residual network is proposed to identify the separated signals. The proposed deep residual network solves the separation order uncertainty and noise residual problem of the BSS algorithm.
- (4)
- The proposed method has good signal and image reproduction in the simulation data and the measured data of RADARSAT-1 transmitted by the Canadian Space Agency and has a strong ability to suppress complex electromagnetic interference. At the same time, by comparing the capability of the deep residual network with the traditional networks in both simulated and measured data, our proposed deep residual network has better overall recognition performance.
2. Related Works
2.1. Airborne SAR Imaging and Signal Model
2.2. Complex Interference Signal Model
2.3. Deep Residual Learning
3. Complex Electromagnetic Interference Suppression Based on BSS and the Deep Residual Network
3.1. BSS Algorithm Using Maximum Kurtosis Deconvolution and Improved PCA
- (1)
- The mixed matrix A is the column full rank.
- (2)
- At most, one of the components of follows a Gaussian distribution.
- (3)
- and are independent of each other.
- (4)
- A zero-mean random signal where the components of are correlated in time but not in space.
| Algorithm 1 Iterative solutions for maximum kurtosis deconvolution |
| Step 1: Define the length N of the FIR filter and the iteration stop threshold , initialize the filter |
| Step 2: Calculate the Toeplitz matrix X of the input signal and the autocorrelation matrix |
| Step 3: Calculate the estimated output based on the known output and the FIR filter parameter |
| Step 4: Update according to (16) |
| Step 5: Calculate the iteration error : |
| Step 6: Stop iteration when the iteration error is less than the threshold and the output |
3.2. Signal Recognition Based on the Deep Residual Network
3.3. Summary of the Entire Method
4. Experimental Results and Analysis
4.1. Evaluation Criteria
4.2. Simulation Experiments and Analysis
4.3. Measurement Experiments and Analysis
4.4. Overall Recognition Results for Deep Residual Networks
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bai, X.; Zhou, F.; Xing, M.; Bao, Z. Scaling the 3-D Image of Spinning Space Debris via Bistatic Inverse Synthetic Aperture Radar. IEEE Geosci. Remote Sens. Lett. 2010, 7, 430–434. [Google Scholar] [CrossRef]
- Soumekh, M. Moving target detection in foliage using along track monopulse synthetic aperture radar imaging. IEEE Trans. Image Process. 1997, 6, 1148–1163. [Google Scholar] [CrossRef]
- Fortuny, J.; Sieber, A. Three-dimensional synthetic aperture radar imaging of a fir tree: First results. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1006–1014. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Liu, Q.H. Frequency-Domain Backprojection Algorithm for Synthetic Aperture Radar Imaging. IEEE Geosci. Remote Sens. Lett. 2015, 12, 905–909. [Google Scholar]
- Zhang, X.; Liu, Z.; Kong, Y.; Li, C. Mutual Interference Suppression Using Signal Separation and Adaptive Mode Decomposition in Noncontact Vital Sign Measurements. IEEE Trans. Instrum. Meas. 2022, 71, 4001015. [Google Scholar] [CrossRef]
- Reverter, F.; Gasulla, M.; Pallas-Areny, R. Analysis of Power-Supply Interference Effects on Direct Sensor-to-Microcontroller Interfaces. IEEE Trans. Instrum. Meas. 2007, 56, 171–177. [Google Scholar] [CrossRef]
- Cadambe, V.R.; Jafar, S.A. Interference Alignment and Degrees of Freedom of the K-User Interference Channel. IEEE Trans. Inf. Theory. 2008, 54, 3425–3441. [Google Scholar] [CrossRef]
- Popescu, D.C.; Yaddanapudi, P. Narrowband Interference Avoidance in OFDM-Based UWB Communication Systems. IEEE Trans. Commun. 2007, 55, 1667–1673. [Google Scholar] [CrossRef]
- Nie, G.; Liao, G.; Zeng, C.; Zhang, X.; Li, D. Joint Radio Frequency Interference and Deceptive Jamming Suppression Method for Single-Channel SAR via Subpulse Coding. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 787–798. [Google Scholar] [CrossRef]
- Liao, Y.; Tang, H.; Wang, W.-Q.; Xing, M. A Low Sidelobe Deceptive Jamming Suppression Beamforming Method with a Frequency Diverse Array. IEEE Trans. Antennas Propag. 2022, 70, 4884–4889. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, L.; Li, J.; Chen, Z.; Yang, X. Reweighted Tensor Factorization Method for SAR Narrowband and Wideband Interference Mitigation Using Smoothing Multiview Tensor Model. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3298–3313. [Google Scholar] [CrossRef]
- Zhang, W.; Tait, A.; Huang, C.; Ferreira de Lima, T.; Bilodeau, S.; Blow, E.C.; Jha, A.; Shastri, B.J.; Prucnal, P. Broadband physical layer cognitive radio with an integrated photonic processor for blind source separation. Nat. Commun. 2023, 14, 1107. [Google Scholar] [CrossRef] [PubMed]
- Chang, S.; Deng, Y.; Zhang, Y.; Zhao, Q.; Wang, R.; Zhang, K. An Advanced Scheme for Range Ambiguity Suppression of Spaceborne SAR Based on Blind Source Separation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5230112. [Google Scholar] [CrossRef]
- Brendel, A.; Haubner, T.; Kellermann, W. A Unifying View on Blind Source Separation of Convolutive Mixtures Based on Independent Component Analysis. IEEE Trans. Signal Process. 2023, 71, 816–830. [Google Scholar] [CrossRef]
- Herault, J.; Jutten, C. Space or time adaptive signal processing by neural network models. In Proceedings of the AIP Conference Proceedings, Snowbird, UT, USA, 13–16 April 1986; Volume 151, pp. 206–211. [Google Scholar]
- Giannakis, G.B.; Swami, A. New Results On State-Space And Input-Output Identification Of Non-Gaussian Processes Using Cumulants. In Advanced Algorithms and Architectures for Signal Processing II, Proceedings of the 31st Annual Technical Symposium on Optical and Optoelectronic Applied Sciences and Engineering, San Diego, CA, USA, 21 January 1988; International Society for Optics and Photonics: Bellingham, WA, USA, 1988. [Google Scholar]
- Jutten, C.; Herault, J. Blind separation of sources, part I: An adaptive algorithm based on neuromimetic architecture. Signal Process. 1991, 24, 1–10. [Google Scholar] [CrossRef]
- Dutta, S.; Basarab, A.; Georgeot, B.; Kouamé, D. A novel image denoising algorithm using concepts of quantum many-body theory. Signal Process. 2022, 201, 108690. [Google Scholar] [CrossRef]
- Chen, Y.K.; Bakhary, N.; Padil, K.H.; Li, J.; Shamsudin, M.F. Reducing false damage detections in guided ultrasonic wave monitoring systems using a denoising autoencoder. Nondestruct. Test. Eval. 2024, 40, 1610–1640. [Google Scholar] [CrossRef]
- Sophian, A.; Tian, G.Y.; Taylor, D.; Rudlin, J. A feature extraction technique based on principal component analysis for pulsed Eddy current NDT. NDT E Int. 2003, 36, 37–41. [Google Scholar] [CrossRef]
- Chen, K.; Wang, L.; Zhang, J.; Chen, S.; Zhang, S. Semantic Learning for Analysis of Overlapping LPI Radar Signals. IEEE Trans. Instrum. Meas. 2023, 72, 8501615. [Google Scholar] [CrossRef]
- Sarikaya, R.; Hinton, G.E.; Deoras, A. Application of Deep Belief Networks for Natural Language Understanding. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 778–784. [Google Scholar] [CrossRef]
- Fan, J.; Zhao, T.; Kuang, Z.; Zheng, Y.; Zhang, J.; Yu, J.; Peng, J. HD-MTL: Hierarchical Deep Multi-Task Learning for Large-Scale Visual Recognition. IEEE Trans. Image Process. 2017, 26, 1923–1938. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Lin, Z.; Shen, X.; Brandt, J.; Hua, G. A Convolutional Neural Network Cascade for Face Detection. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 12 June 2015; pp. 5325–5334. [Google Scholar]
- Meng, Z.; Zhang, M.; Wang, H. CNN with Pose Segmentation for Suspicious Object Detection in MMW Security Images. Sensors 2020, 20, 4974. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the European Conference on Computer Vision, New York, NY, USA, 6–12 September 2014; Springer: Princeton, NJ, USA, 2014; pp. 818–833. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010; JMLR Workshop and Conference Proceedings. pp. 249–256. [Google Scholar]
- Belouchrani, A.; Abed-Meraim, K.; Cardoso, J.F.; Moulines, E. A blind source separation technique using second-order statistics. IEEE Trans. Signal Process. 1997, 45, 434–444. [Google Scholar] [CrossRef]
- Cao, X.-R.; Liu, R.-W. General approach to blind source separation. IEEE Trans. Signal Process. 1996, 44, 562–571. [Google Scholar]
- Sheinvald, J. On blind beamforming for multiple non-Gaussian signals and the constant-modulus algorithm. IEEE Trans. Signal Process. 1998, 46, 1878–1885. [Google Scholar] [CrossRef]
- Cardoso, J.F.; Laheld, B.H. Equivariant adaptive source separation. IEEE Trans. Signal Process. 1996, 44, 3017–3030. [Google Scholar] [CrossRef]
- Tong, L.; Liu, R.W.; Soon, V.C.; Huang, Y.F. Indeterminacy and identifiability of blind identification. IEEE Trans. Circuits Syst. 1991, 38, 499–509. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; Zuo, M.J.; He, Z. Blind Source Separation Based on Support Vector Machines for Fault Diagnosis of Rotating Machinery. Mech. Syst. Signal Process. 2014, 42, 314–327. [Google Scholar]
- Chen, K.; Chen, S.; Zhang, S.; Zhao, H. Automatic modulation recognition of radar signals based on histogram of oriented gradient via improved principal component analysis. Signal Image Video Process. 2023, 17, 3053–3061. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, S.; Zhu, L.; Chen, S.; Zhao, H. Modulation Recognition of Radar Signals Based on Adaptive Singular Value Reconstruction and Deep Residual Learning. Sensors 2021, 21, 449. [Google Scholar] [CrossRef]
- Chen, K.; Zhu, L.; Chen, S.; Zhang, S.; Zhao, H. Deep residual learning in modulation recognition of radar signals using higher-order spectral distribution. Measurement 2021, 185, 109945. [Google Scholar] [CrossRef]
- Yang, D.; Sun, J. BM3D-Net: A convolutional neural network for transform-domain collaborative filtering. IEEE Signal Process. Lett. 2017, 25, 55–59. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, Q.; Li, Y.; Chen, W.; Wang, L. Spectral-Spatial Residual Shrinkage Network for Hyperspectral Image Classification. ISPRS J. Photogramm. Remote Sens. 2023, 195, 379–392. [Google Scholar]
- Shih, K.-H.; Chiu, C.-T.; Lin, J.-A.; Bu, Y.-Y. Real-time object detection with reduced region proposal network via multi-feature concatenation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2164–2173. [Google Scholar] [CrossRef]
- Zhou, F.; Tao, M.; Bai, X.; Liu, J. Narrow-band interference suppression for SAR based on independent component analysis. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4952–4960. [Google Scholar] [CrossRef]
- Pavani, M.; Seco-Granados, G.; López-Salcedo, J.A. Blind Source Separation Based on AMUSE Algorithm for Anti-Jamming in GNSS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2021–2035. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; p. 9. [Google Scholar]
- Patel, K.; Gupta, R. Lightweight AlexNet for Real-Time Surface Defect Detection in Steel Manufacturing. IEEE Trans. Ind. Inform. 2023, 19, 2345–2356. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1–9. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Settings | Size | Settings | Size |
|---|---|---|---|
| Central frequency | 1.5 (GHz) | Pulse width | 1.5 (μs) |
| Signal bandwidth | 150 (MHz) | SAR height | 1000 (m) |
| Speed of SAR | 100 (m/s) | The SNR of noise | 10 (dB) |
| Range samples | 1024 | Suppressive interference frequency | 1.5 (GHz) |
| Azimuth samples | 1024 | Suppressive interference bandwidth | 450 (MHz) |
| SJR of FSI | 0 (dB) | Azimuth frequency shift | 45 (MHz) |
| SJR of NFMI | −35 (dB) | Range frequency shift | 60 (MHz) |
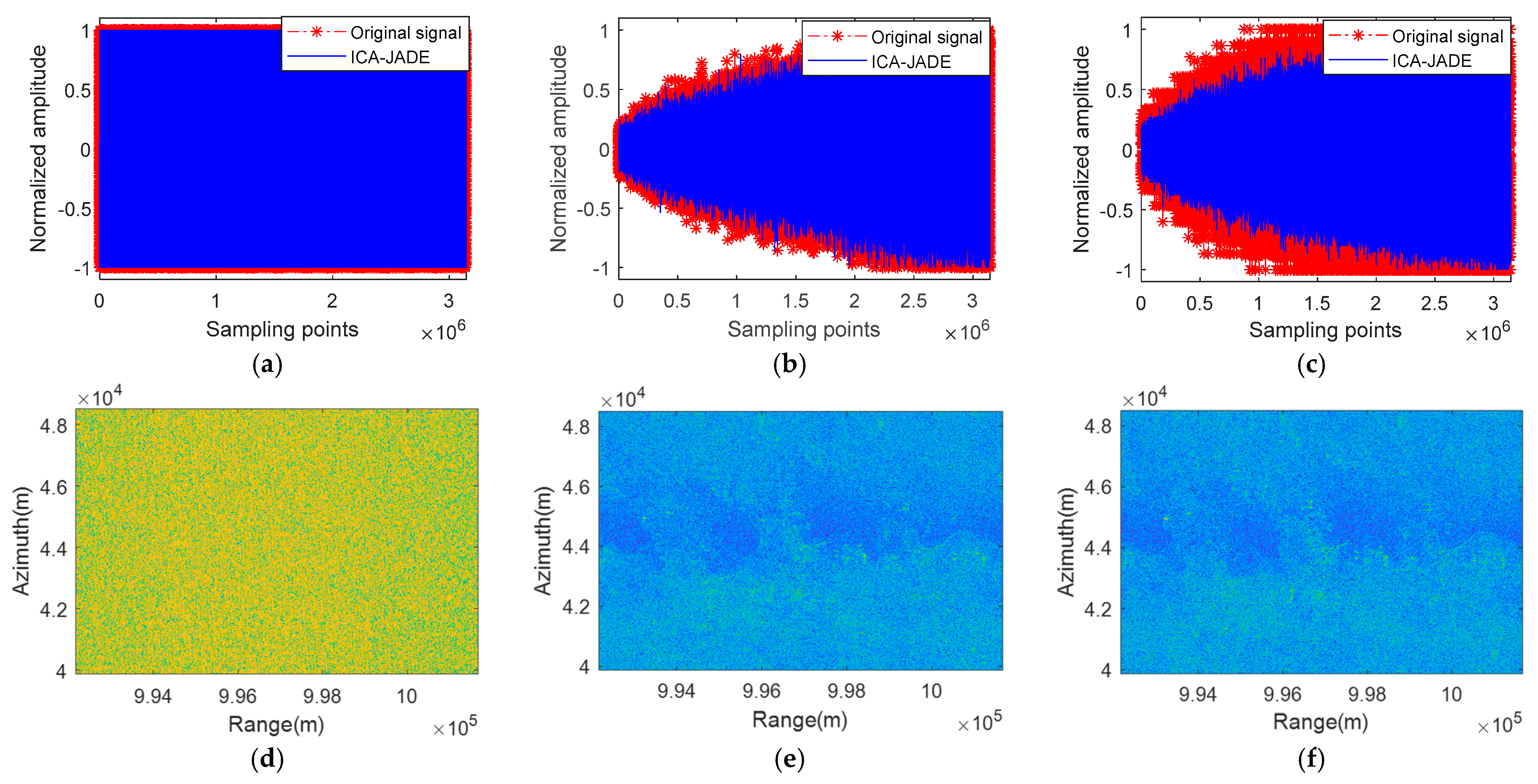
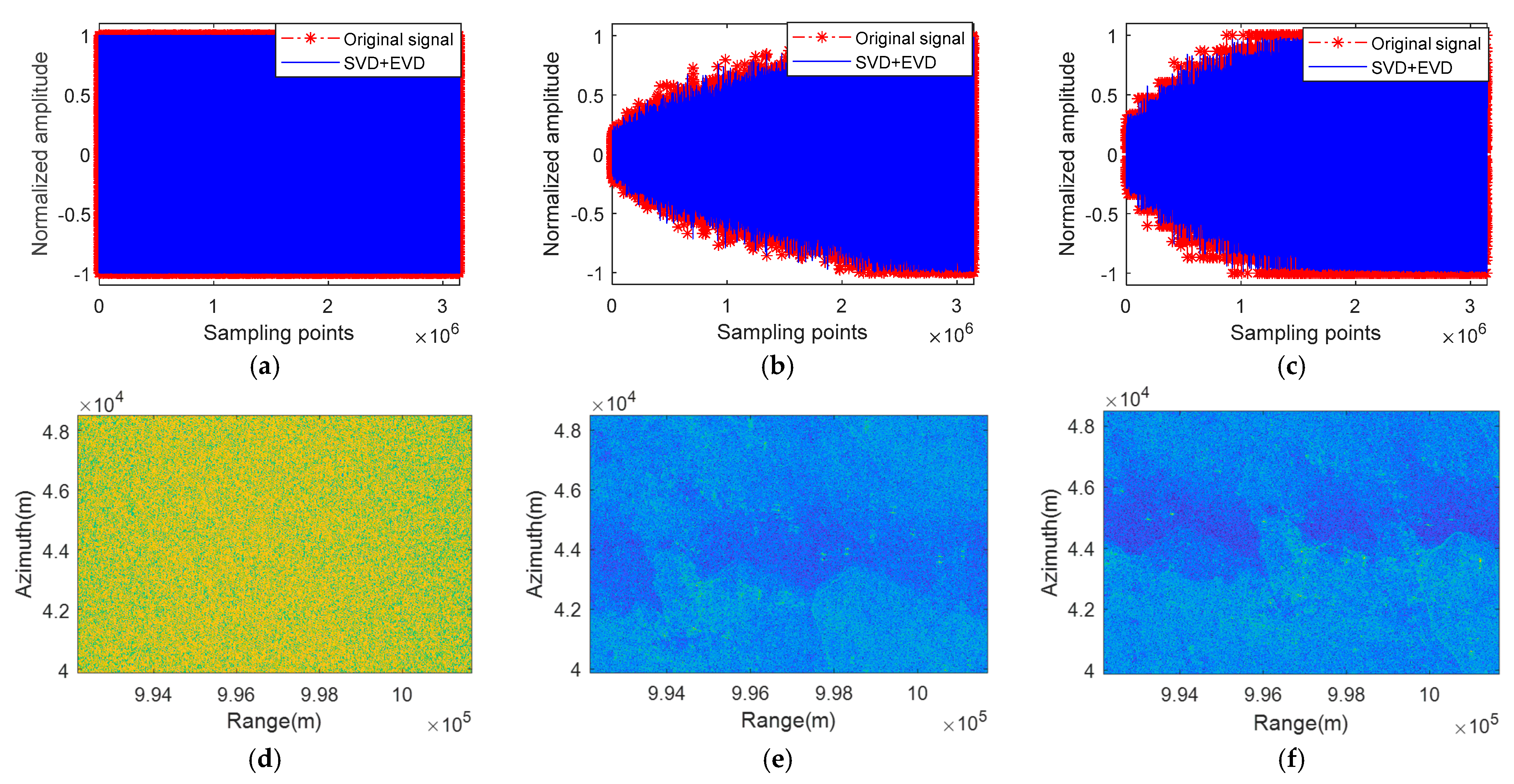
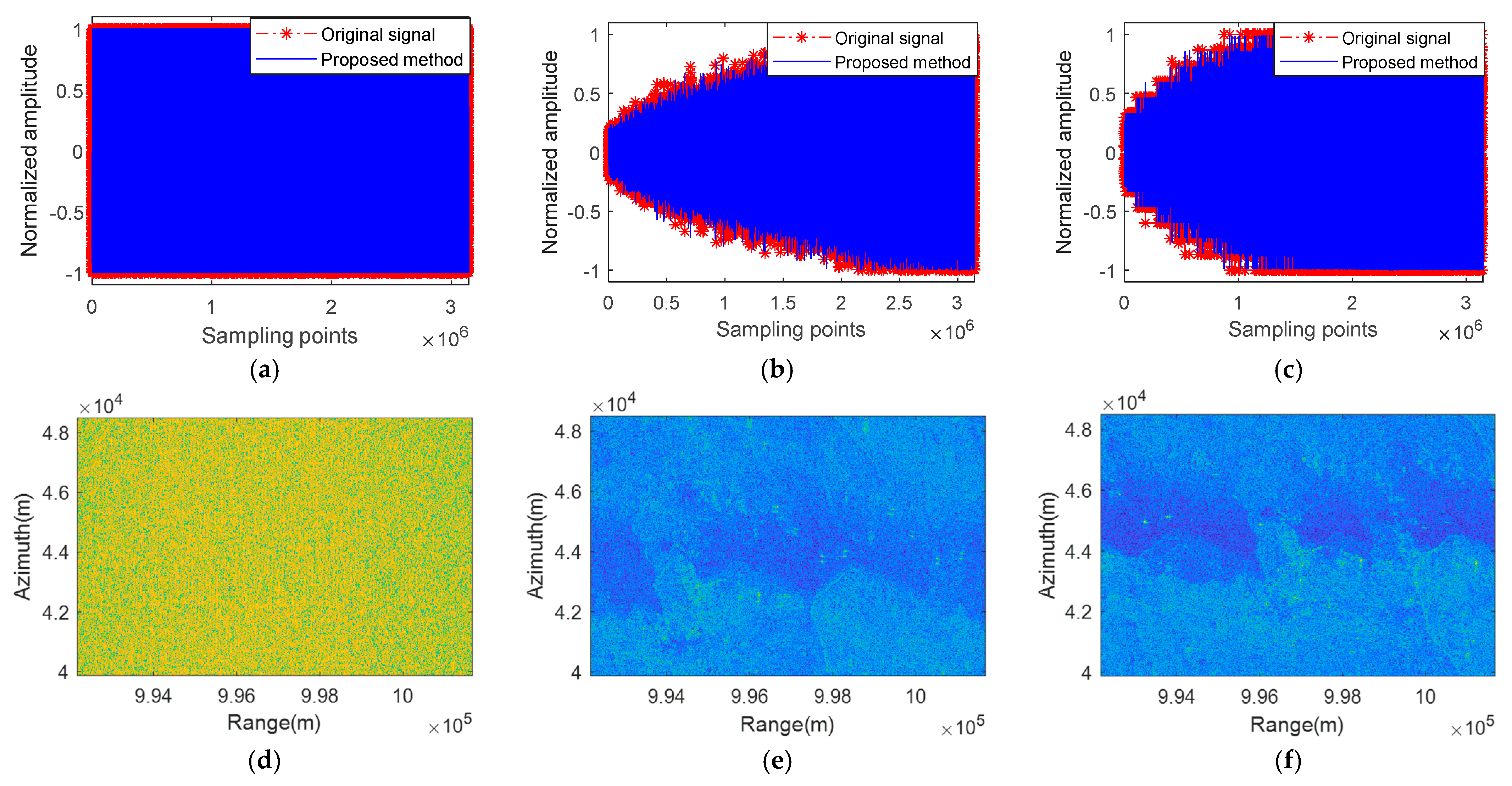
| Evaluation Criteria | ICA-JADE | SVD + EVD | Ours | |
|---|---|---|---|---|
| SCC | Suppressive interference | 1 | 1 | 1 |
| Deceptive interference | 0.6484 | 0.9717 | 1 | |
| Original signal | 0.5931 | 0.9890 | 1 | |
| PMSE (dB) | Suppressive interference | −14.9876 | −15.5805 | −15.7228 |
| Deceptive interference | −38.5028 | −52.1302 | −112.1117 | |
| Original signal | −41.9832 | −80.0315 | −125.2649 | |
| Evaluation Criteria | ICA-JADE | SVD + EVD | Ours | |
|---|---|---|---|---|
| SCC | Suppressive interference | 1 | 1 | 1 |
| Deceptive interference | 0.6796 | 0.9996 | 1 | |
| Original signal | 0.6941 | 0.9993 | 1 | |
| PMSE (dB) | Suppressive interference | −14.8063 | −15.7655 | −16.4375 |
| Deceptive interference | −22.0090 | −78.2647 | −88.5516 | |
| Original signal | −23.4203 | −83.5666 | −88.1238 | |
| Network | Overall Recognition Rate |
|---|---|
| AlexNet | 84.3% |
| VGGNet | 87.2% |
| ResNet | 94.3% |
| GoogLeNet | 94.2% |
| Ours | 95.7% |
| Network | Overall Recognition Rate |
|---|---|
| AlexNet | 93.2% |
| VGGNet | 92.2% |
| ResNet | 95.3% |
| GoogLeNet | 96.9% |
| Ours | 99.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, L.; Zhang, J.; Ran, Y.; Chen, K.; Maidan, A.; Huan, L.; Liao, H. Blind Signal Separation with Deep Residual Networks for Robust Synthetic Aperture Radar Signal Processing in Interference Electromagnetic Environments. Electronics 2025, 14, 1950. https://doi.org/10.3390/electronics14101950
Fang L, Zhang J, Ran Y, Chen K, Maidan A, Huan L, Liao H. Blind Signal Separation with Deep Residual Networks for Robust Synthetic Aperture Radar Signal Processing in Interference Electromagnetic Environments. Electronics. 2025; 14(10):1950. https://doi.org/10.3390/electronics14101950
Chicago/Turabian StyleFang, Lixiong, Jianwen Zhang, Yi Ran, Kuiyu Chen, Aimer Maidan, Lu Huan, and Huyang Liao. 2025. "Blind Signal Separation with Deep Residual Networks for Robust Synthetic Aperture Radar Signal Processing in Interference Electromagnetic Environments" Electronics 14, no. 10: 1950. https://doi.org/10.3390/electronics14101950
APA StyleFang, L., Zhang, J., Ran, Y., Chen, K., Maidan, A., Huan, L., & Liao, H. (2025). Blind Signal Separation with Deep Residual Networks for Robust Synthetic Aperture Radar Signal Processing in Interference Electromagnetic Environments. Electronics, 14(10), 1950. https://doi.org/10.3390/electronics14101950