
Bayesian Adaptive Detection for Distributed MIMO Radar with Insufficient Training Data


Abstract
1. Introduction
2. Problem Formulation
3. Detector Design
3.1. GLRT
3.2. Rao Test
3.3. Wald Test
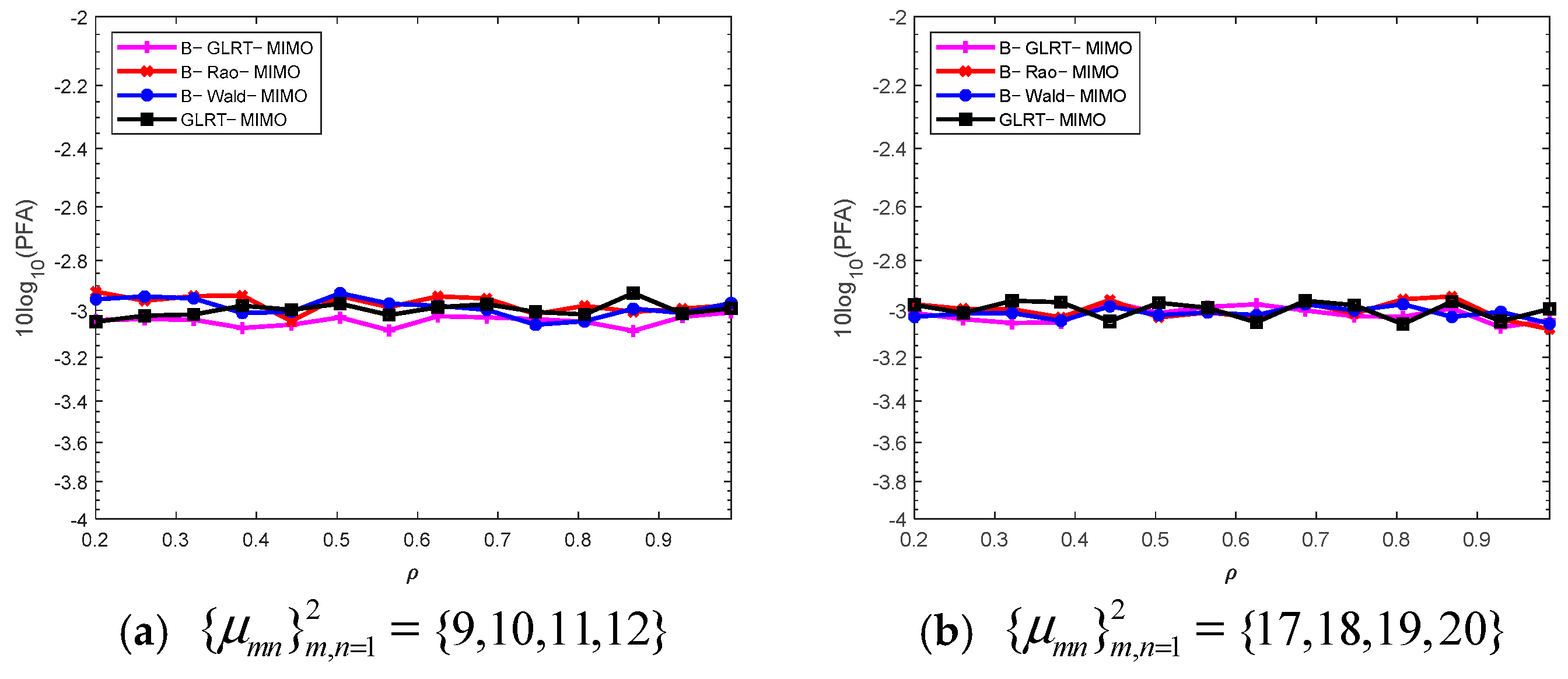
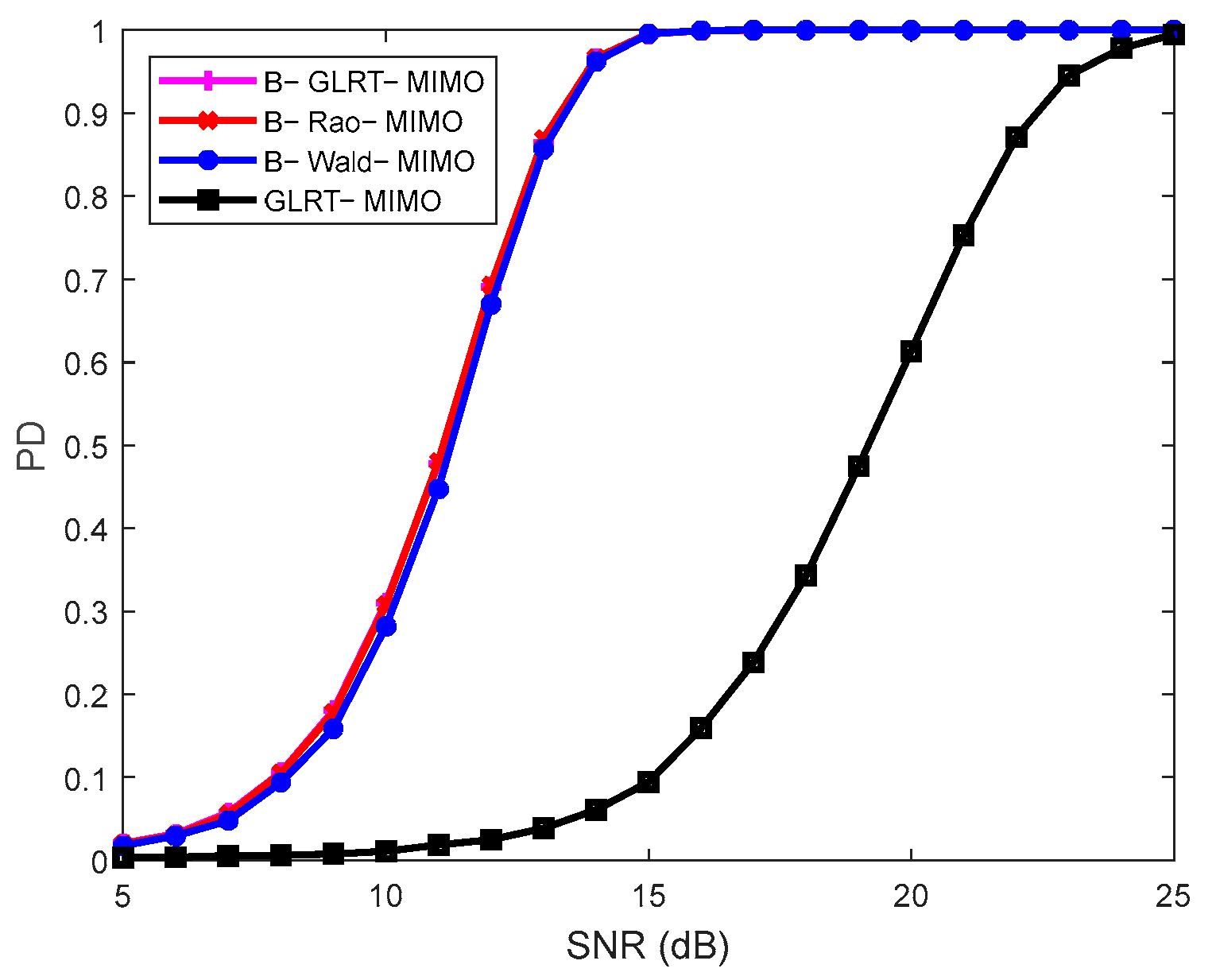
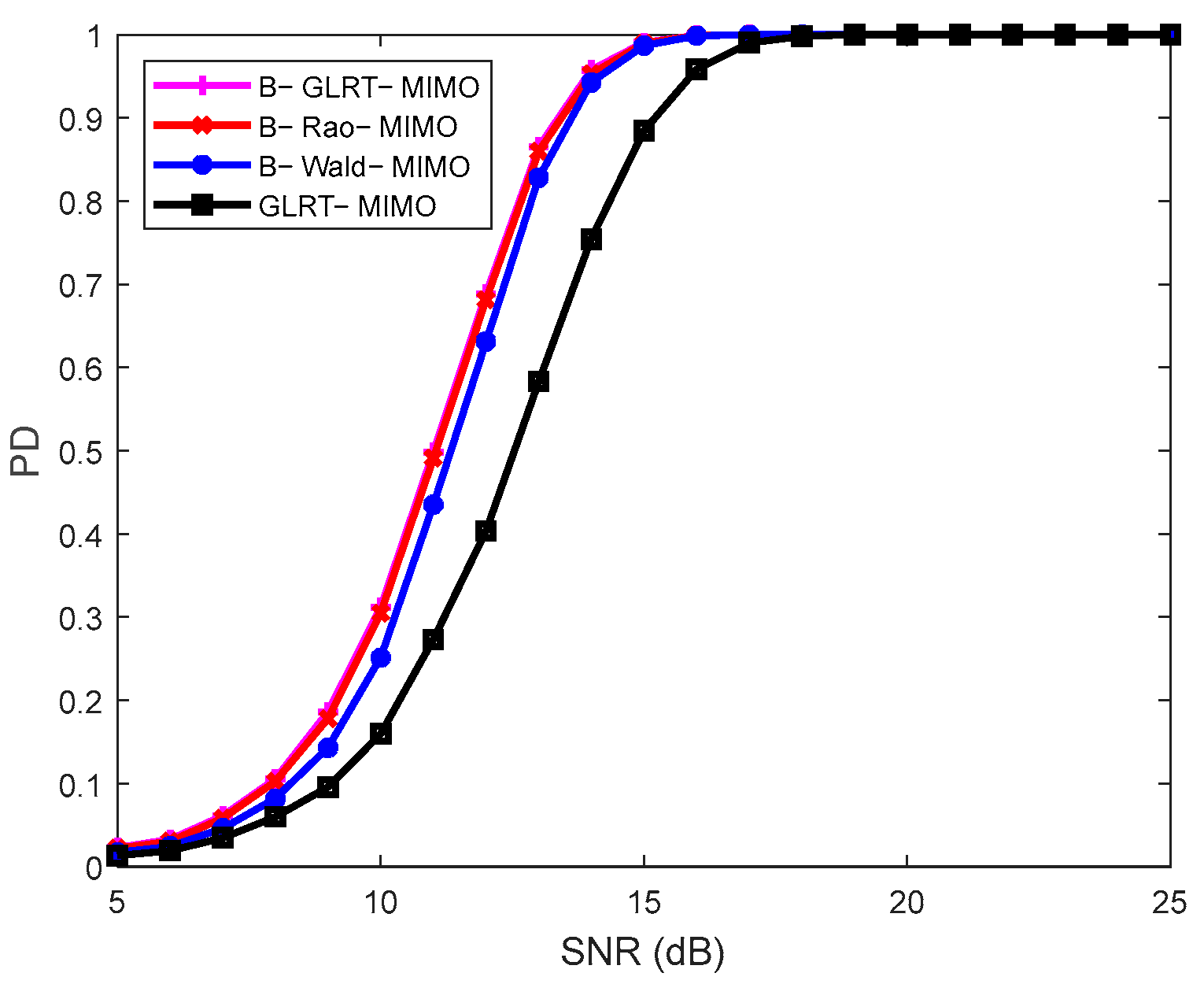
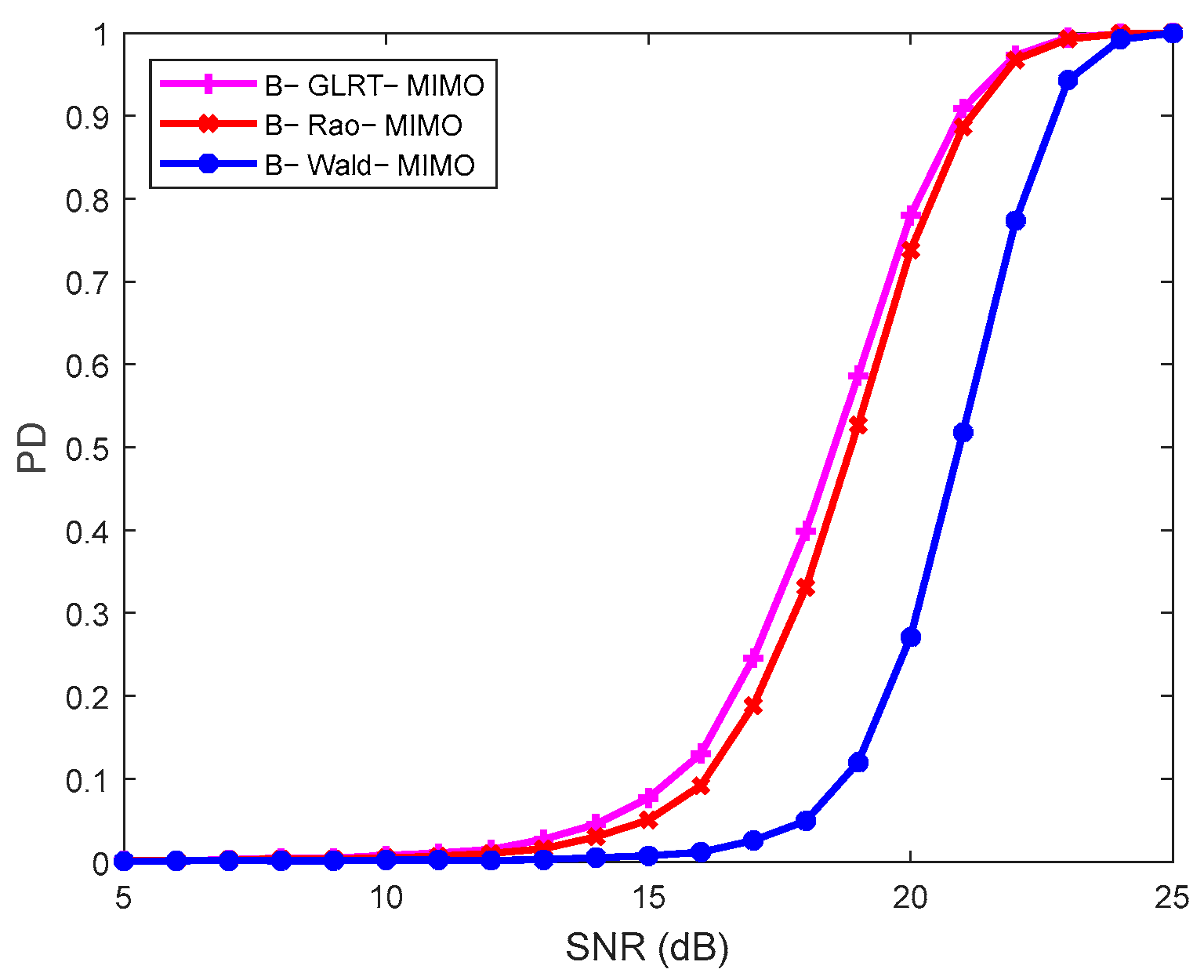
4. Performance Evaluation
- Optimized antenna design. Adopting advanced antenna technologies to reduce the physical size and complexity of the antennas without compromising performance. This may include the use of metamaterial-based antennas.
- Antenna selection techniques. Instead of using all available antennas, select a subset of antennas that offers the best trade-off between performance and complexity. This can reduce the number of antennas required and the associated system complexity.
- Compressed sensing. Utilizing compressed sensing techniques to reduce the amount of data that need to be processed. This method can effectively recover sparse signals from a small number of measurements.
- Parallel processing. Implementing parallel processing hardware, such as multi-core processors or field-programmable gate arrays (FPGAs), to handle the increased data processing demands. This can significantly reduce processing time.
- Algorithm optimization. Developing and implementing more efficient signal processing and data analysis algorithms. This may include algorithms specifically designed for processing high-dimensional data with lower computational complexity.
- Resource management. Implementing effective resource management strategies to efficiently allocate processing power and bandwidth. This helps optimize the use of available resources and reduces the overall system complexity.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, W.; Liu, J.; Hao, C.; Gao, Y.; Wang, Y.-L. Multichannel adaptive signal detection: Basic theory and literature review. Sci. China Inf. Sci. 2022, 65, 121301. [Google Scholar] [CrossRef]
- Shen, W.; Wang, S.; Wang, Y.; Li, Y.; Lin, Y.; Zhou, Y.; Xu, X. Moving Target Detection Algorithm for Millimeter Wave Radar Based on Keystone-2DFFT. Electronics 2023, 12, 4776. [Google Scholar] [CrossRef]
- Yang, C.; Wang, X.; Ni, W. Joint Transmit and Receive Beamforming Design for DPC-Based MIMO DFRC Systems. Electronics 2024, 13, 1846. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, C.; Liu, X.; Zhu, Y.; Liu, Y. A Waveform Design for MIMO Sensing on Two-Dimensional Arrays with Sparse Estimation. Electronics 2023, 12, 3906. [Google Scholar] [CrossRef]
- Zaimbashi, A.; Li, J. Tunable Adaptive Target Detection With Kernels in Colocated MIMO Radar. IEEE Trans. Signal Process. 2020, 68, 1500–1514. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.-L.; Liu, J.; Xie, W.; Chen, H.; Gu, W. Adaptive Detection Without Training Data in Colocated MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2469–2479. [Google Scholar] [CrossRef]
- Pan, X.; Li, S.; Pan, C. Distributed broadband phased-MIMO sonar for detection of small targets in shallow water environments. IET Radar Sonar Navig. 2018, 12, 721–728. [Google Scholar] [CrossRef]
- Yang, S.; Yi, W.; Jakobsson, A. Multitarget Detection Strategy for Distributed MIMO Radar With Widely Separated Antennas. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO radar with colocated antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- He, C.; Zhang, R.; Huang, B.; Xu, M.; Wang, Z.; Liu, L.; Lu, Z.; Jin, Y. Moving-Target Detection for FDA-MIMO Radar in Partially Homogeneous Environments. Electronics 2024, 13, 851. [Google Scholar] [CrossRef]
- Shikhaliev, A.P.; Himed, B. Distributed MIMO Radar Adaptive Detection in the Presence of Spectral Symmetry. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4721–4728. [Google Scholar] [CrossRef]
- Zaimbashi, A.; Greco, M.S.; Gini, F. Distributed MIMO Passive Radar Target Detection: Holy Trinity, Durbin, and Gradient Tests. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 3427–3441. [Google Scholar] [CrossRef]
- Jing, X.; Su, H.; Jia, C.; Mao, Z.; Shen, L. Fusion detection in distributed MIMO radar under hybrid-order Gaussian model. Signal Process. 2024, 214, 109256. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.S.; Leonard, J.; Cimini, J.; Chizhik, D.; Valenzuela, R.A. Spatial Diversity in Radars—Models and Detection Performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- De Maio, A.; Lops, M. Design principles of MIMO radar detectors. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 886–898. [Google Scholar] [CrossRef]
- De Maio, A.; Lops, M.; Venturino, L. Diversity-integration tradeoffs in MIMO detection. IEEE Trans. Signal Process. 2008, 56, 5051–5061. [Google Scholar] [CrossRef]
- Sheikhi, A.; Zamani, A. Temporal coherent adaptive target detection for multi-input multi-output radars in clutter. IET Radar Sonar Navig. 2008, 2, 86–96. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Z.J.; Cao, Y.H.; Yang, S.Y. A closed-form expression for false alarm rate of adaptive MIMO-GLRT detector with distributed MIMO radar. Signal Process. 2013, 93, 2771–2776. [Google Scholar] [CrossRef]
- Hu, Q.; Su, H.; Zhou, S.; Liu, Z.; Yang, Y.; Liu, J. Two-stage constant false alarm rate detection for distributed multiple-input–multiple-output radar. IET Radar Sonar Navig. 2016, 10, 264–271. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, L.; Wang, X.; Li, H.; Wu, L. Moving Target Detection Using Colocated MIMO Radar on Multiple Distributed Moving Platforms. IEEE Trans. Signal Process. 2017, 65, 4670–4683. [Google Scholar] [CrossRef]
- Zhu, L.; Wen, G.; Liang, Y.; Luo, D.; Song, H. Parametric Wald test for target detection with distributed MIMO radar in partially mixing homogeneous and non-homogeneous environments. IET Radar Sonar Navig. 2022, 16, 470–486. [Google Scholar] [CrossRef]
- Zeng, C.; Wang, F.; Li, H.; Govoni, M.A. Target Detection for Distributed MIMO Radar With Nonorthogonal Waveforms in Cluttered Environments. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5448–5459. [Google Scholar]
- Wang, P.; Li, H.B.; Himed, B. Moving Target Detection Using Distributed MIMO Radar in Clutter With Nonhomogeneous Power. IEEE Trans. Signal Process. 2011, 59, 4809–4820. [Google Scholar] [CrossRef]
- Li, H.; Wang, Z.; Liu, J.; Himed, B. Moving Target Detection in Distributed MIMO Radar on Moving Platforms. IEEE J. Sel. Top. Signal Process. 2015, 9, 1524–1535. [Google Scholar] [CrossRef]
- Gao, Y.; Li, H.; Himed, B. Knowledge-Aided Range-Spread Target Detection for Distributed MIMO Radar in Nonhomogeneous Environments. IEEE Trans. Signal Process. 2017, 65, 617–627. [Google Scholar] [CrossRef]
- Maio, A.D.; Farina, A.; Foglia, G. Knowledge-Aided Bayesian Radar Detectors & Their Application to Live Data. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 170–183. [Google Scholar]
- Tague, J.A.; Caldwell, C.I. Expectations of useful complex Wishart forms. Multidimens. Syst. Signal Process. 1994, 5, 263–279. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.-L.; Xie, W. Fisher Information Matrix, Rao Test, and Wald Test for Complex-Valued Signals and Their Applications. Signal Process. 2014, 94, 1–5. [Google Scholar] [CrossRef]
- Sun, M.; Liu, W.; Liu, J.; Hao, C. Complex parameter Rao, Wald, gradient, and Durbin tests for multichannel signal detection. IEEE Trans. Signal Process. 2022, 70, 117–131. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Liu, M.; Chang, C.; Li, B.; Zhou, B.; Chen, H.; Liu, W. Bayesian Adaptive Detection for Distributed MIMO Radar with Insufficient Training Data. Electronics 2025, 14, 164. https://doi.org/10.3390/electronics14010164
Li H, Liu M, Chang C, Li B, Zhou B, Chen H, Liu W. Bayesian Adaptive Detection for Distributed MIMO Radar with Insufficient Training Data. Electronics. 2025; 14(1):164. https://doi.org/10.3390/electronics14010164
Chicago/Turabian StyleLi, Hongli, Ming Liu, Chunhe Chang, Binbin Li, Bilei Zhou, Hao Chen, and Weijian Liu. 2025. "Bayesian Adaptive Detection for Distributed MIMO Radar with Insufficient Training Data" Electronics 14, no. 1: 164. https://doi.org/10.3390/electronics14010164
APA StyleLi, H., Liu, M., Chang, C., Li, B., Zhou, B., Chen, H., & Liu, W. (2025). Bayesian Adaptive Detection for Distributed MIMO Radar with Insufficient Training Data. Electronics, 14(1), 164. https://doi.org/10.3390/electronics14010164