
Improving sEMG-Based Hand Gesture Recognition through Optimizing Parameters and Sliding Voting Classifiers


Abstract
1. Introduction
2. Methods for sEMG-Based Hand Gesture Recognition
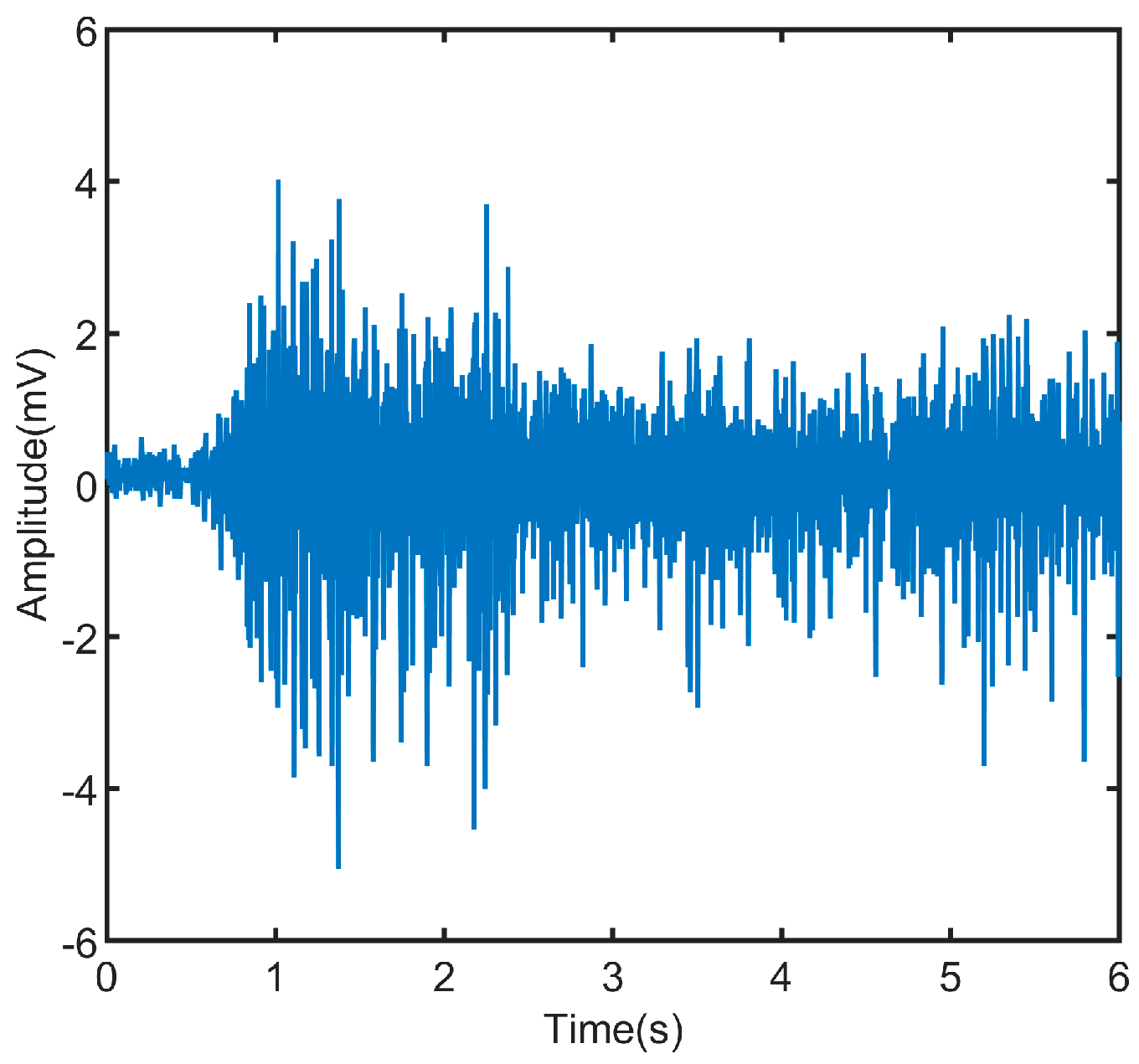
2.1. Data Segmentation
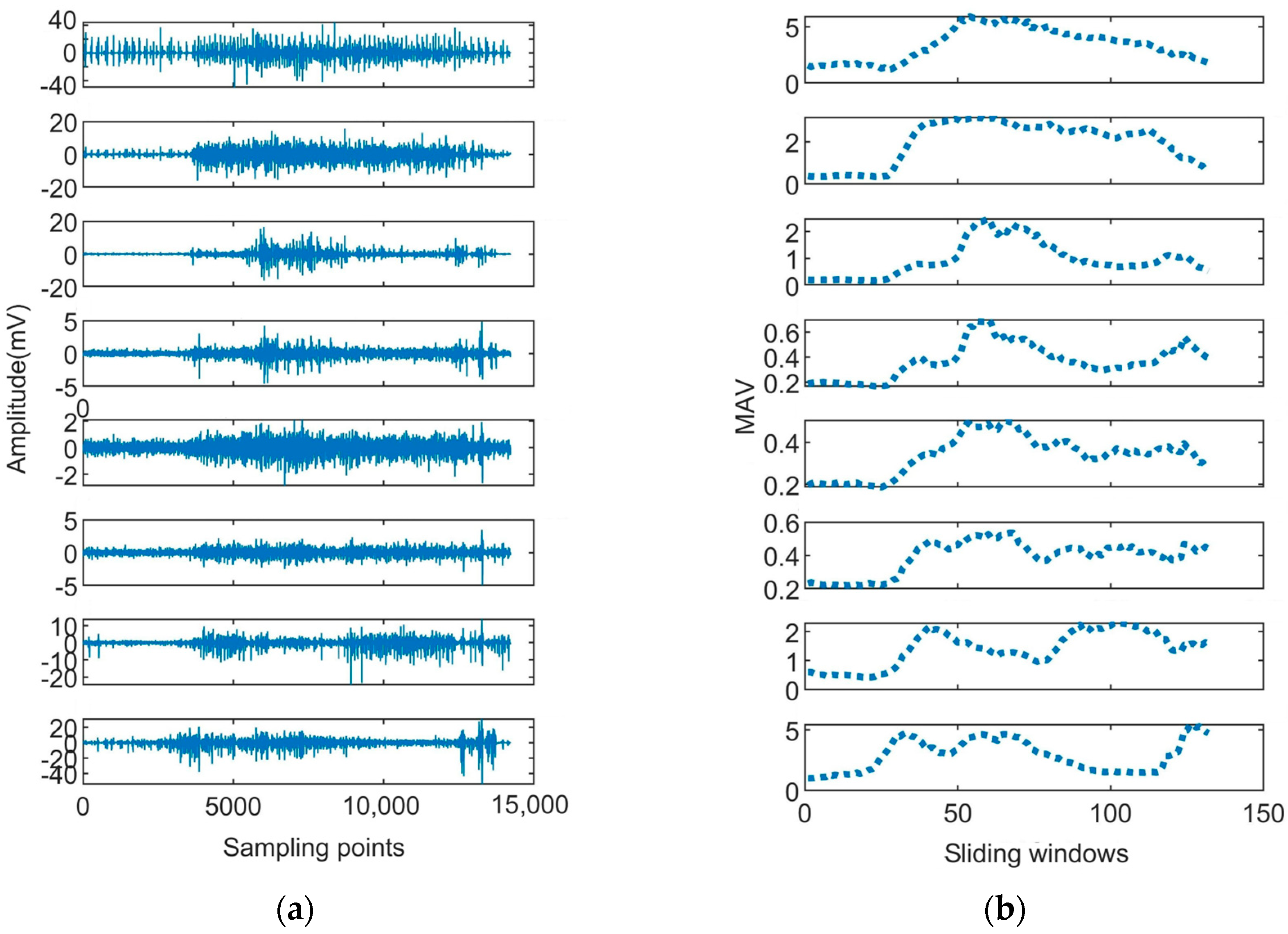
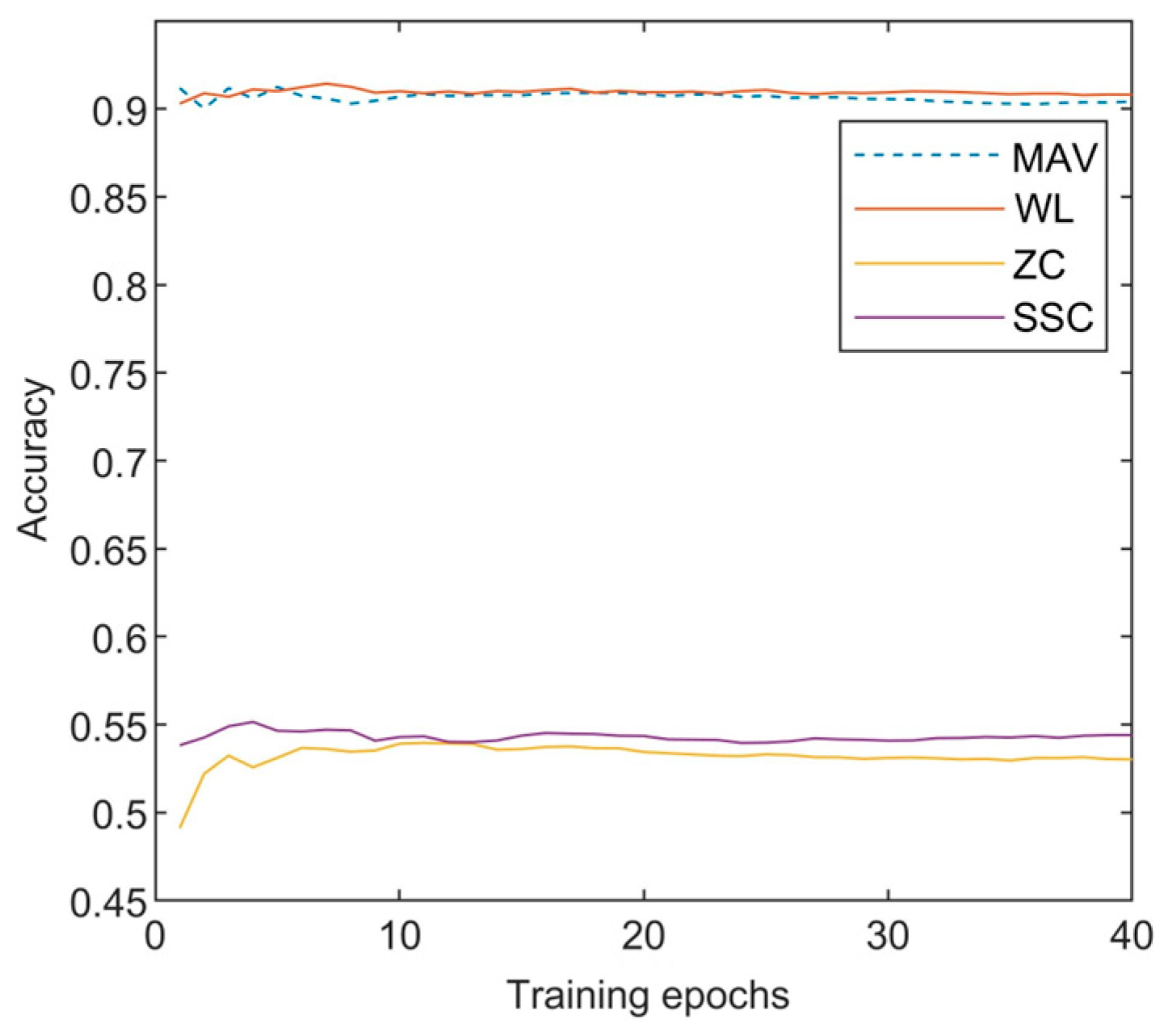
2.2. Feature Extraction
2.3. Pattern Classification
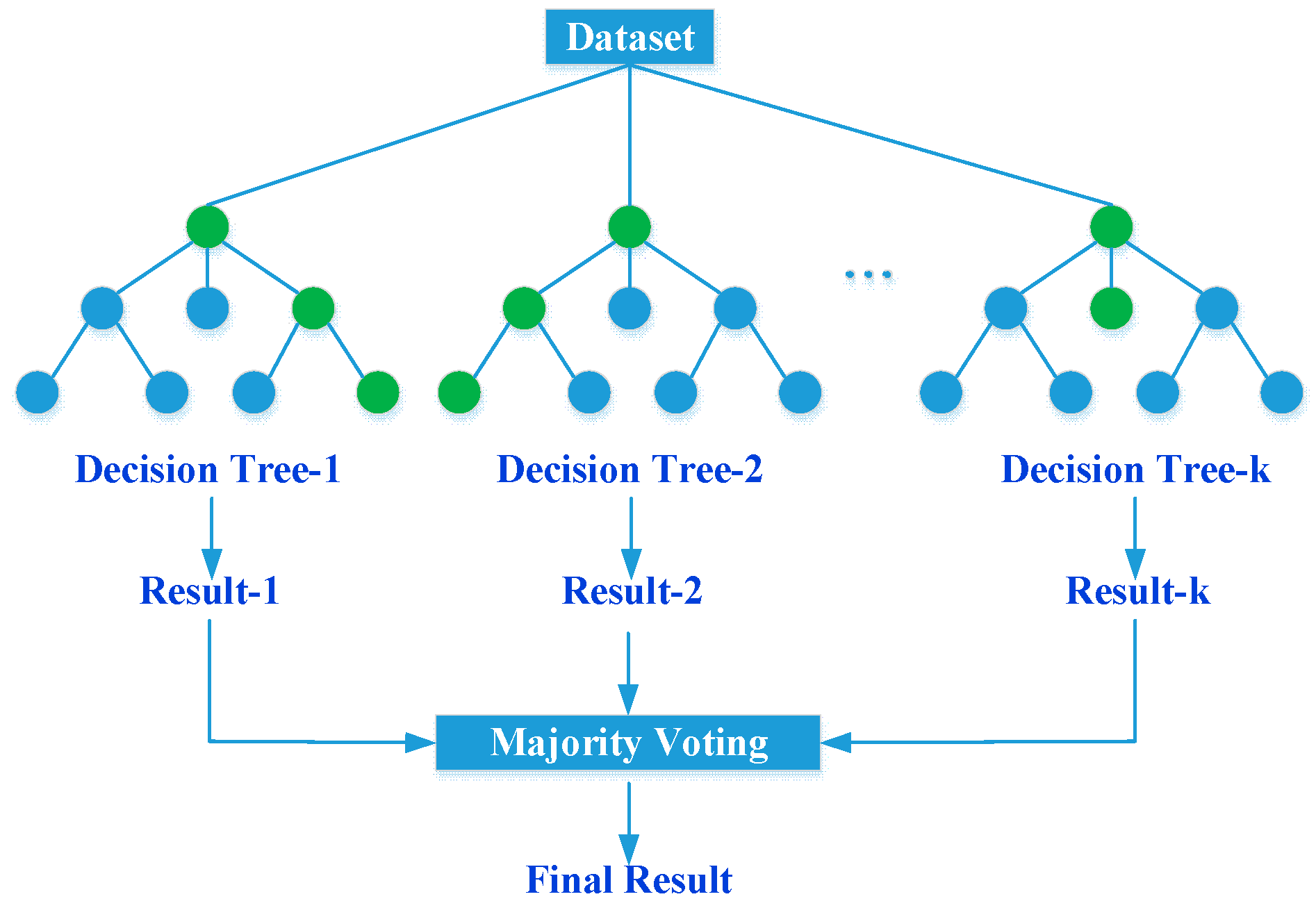
2.3.1. Random Forest Classifier
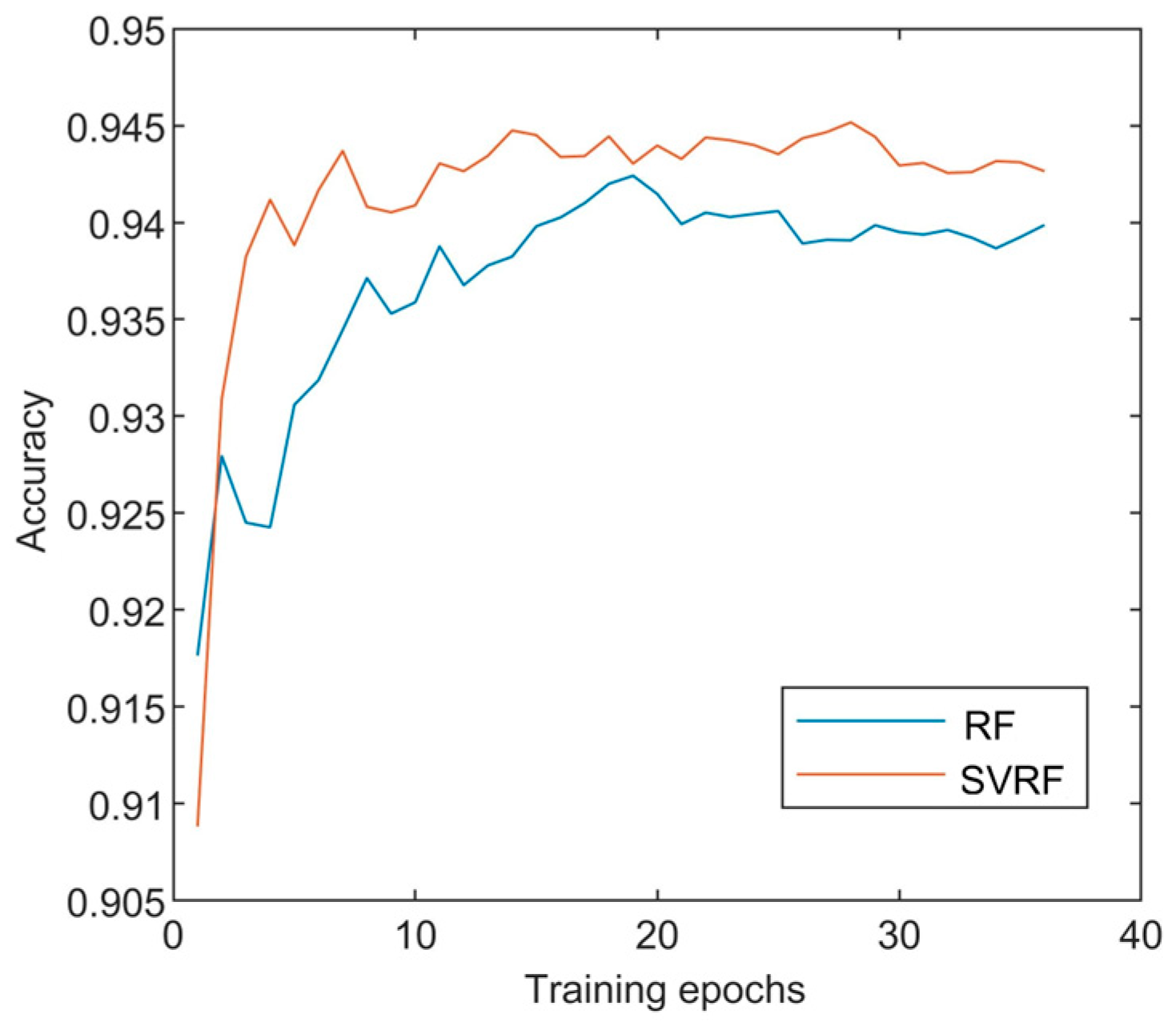
2.3.2. Time-Series Sliding Voting Strategy
3. Results and Discussion
3.1. Testing Using the Ninapro Dataset
3.1.1. Experimental Protocol
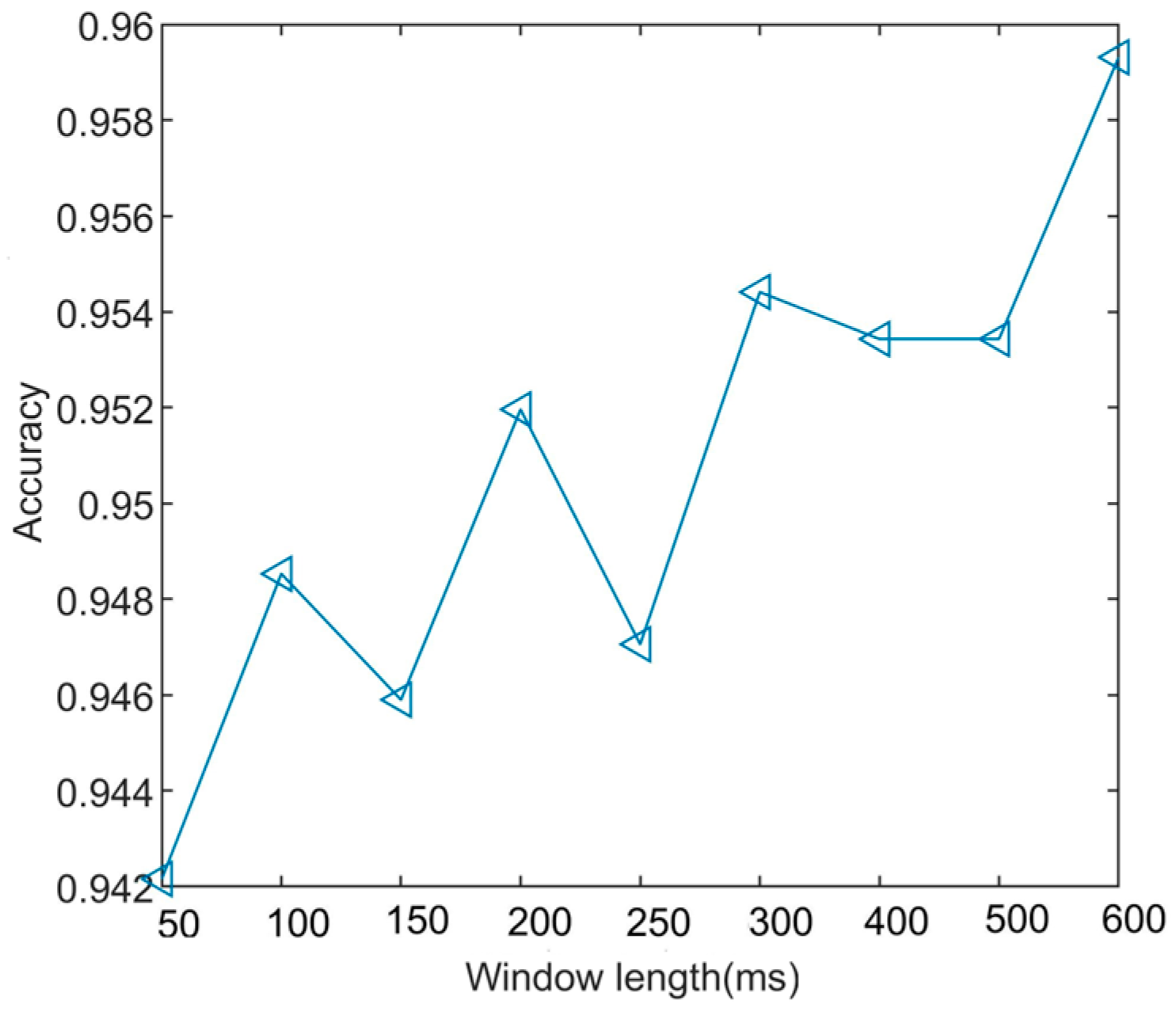
3.1.2. Optimizing Parameters
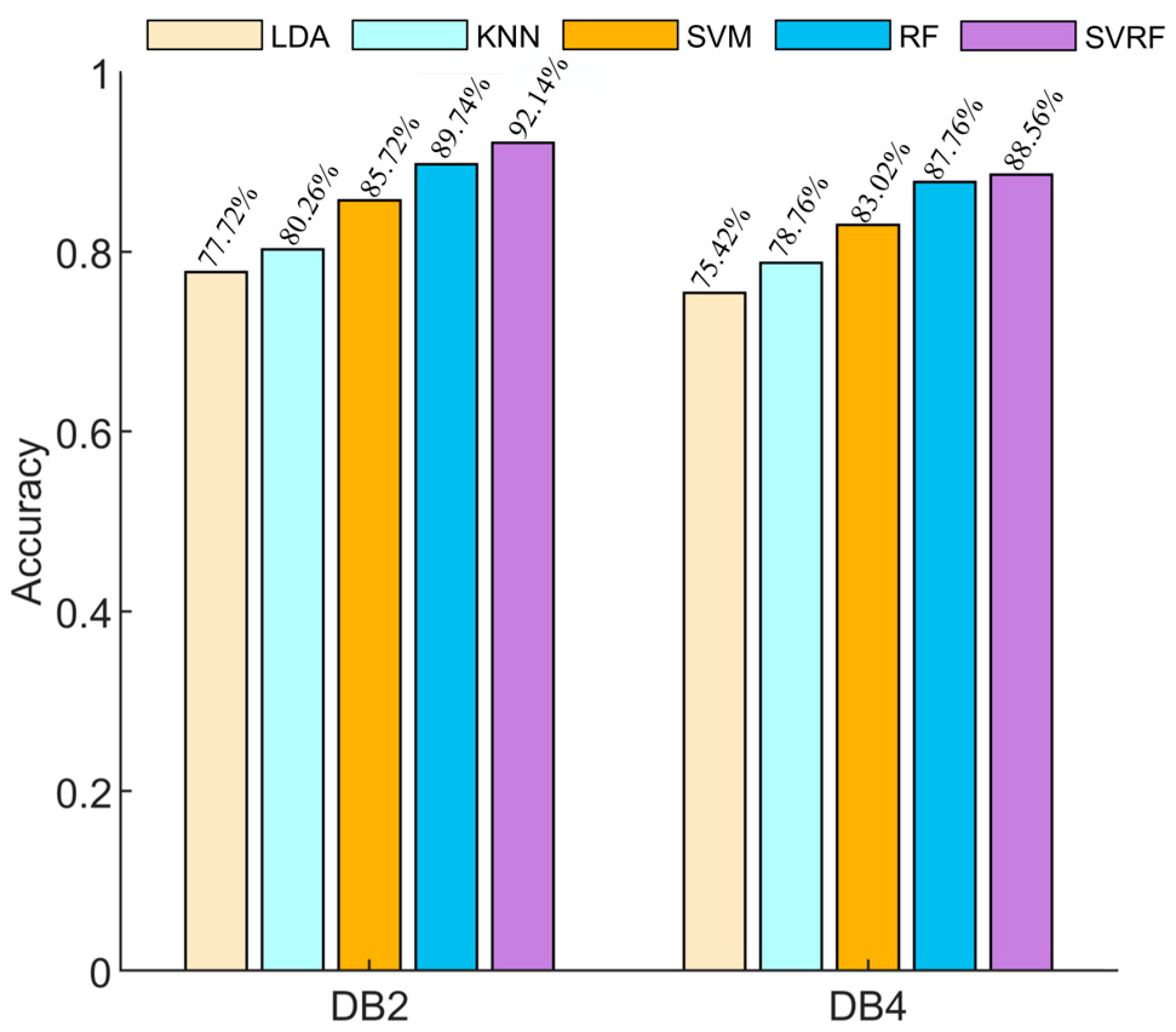
3.1.3. Classification Performance Evaluation
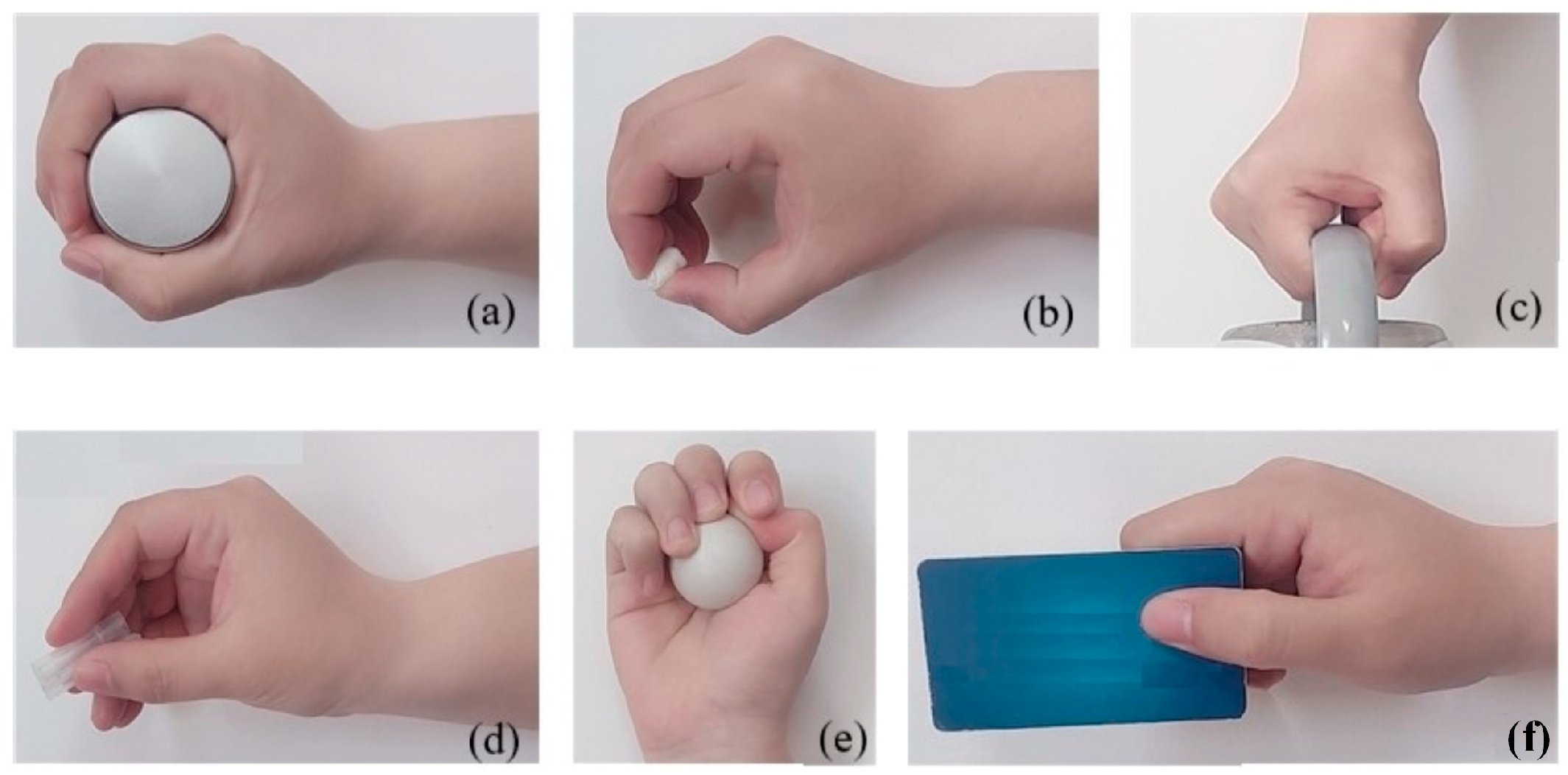
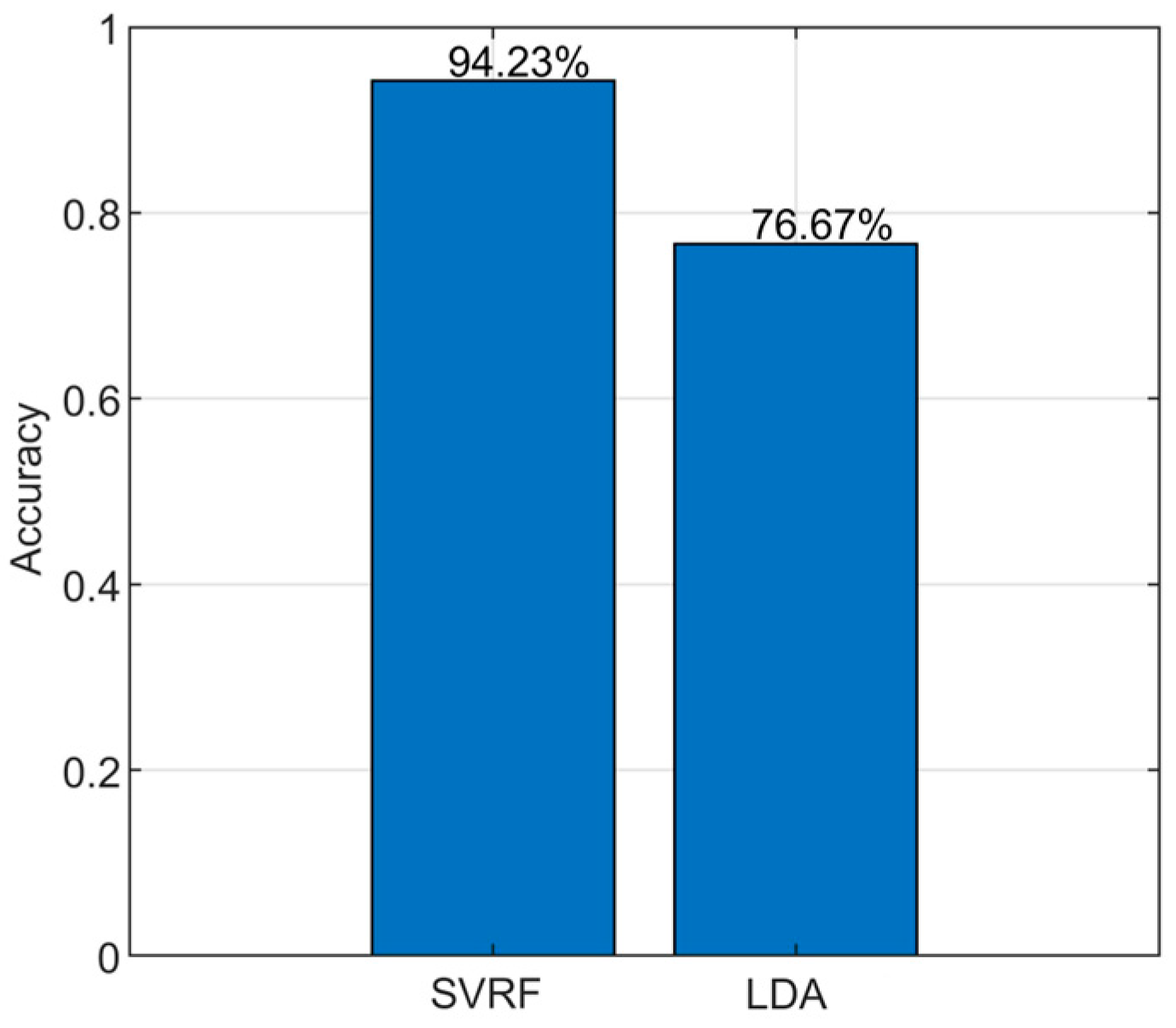
3.2. Testing Using Self-Collected Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oskoei, M.A.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Shin, S.; Tafreshi, R.; Langari, R. Robustness of using dynamic motions and template matching to the limb position effect in myoelectric classification. J. Dyn. Syst. Meas. Control 2016, 138, 111009. [Google Scholar] [CrossRef]
- Chowdhury, R.H.; Reaz, M.B.; Ali, M.A.; Bakar, A.A.; Chellappan, K.; Chang, T.G. Surface electromyography signal processing and classification techniques. Sensors 2013, 9, 12431–12466. [Google Scholar] [CrossRef] [PubMed]
- Hudgins, B.S.; Parker, P.A.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.F.; Chen, Y.L.; Zhang, X.M. The recognition of multi-finger prehensile postures using LDA. Biomed. Signal Process. Control 2013, 8, 706–712. [Google Scholar] [CrossRef]
- Huang, Y.; Englehart, K.B.; Hudgins, B.; Chan, A. A gaussian mixture model based classification scheme for myoelectric control of powered upper limb prostheses. IEEE Trans. Biomed. Eng. 2005, 52, 1801–1811. [Google Scholar] [CrossRef]
- Oskoei, M.A.; Hu, H. Support vector machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef]
- Smith, L.H.; Hargrove, L.J.; Lock, B.A.; Kuiken, T.A. Determining the optimal window length for pattern recognition-based myoelectric control: Balancing the competing effects of classification error and controller delay. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 186–192. [Google Scholar] [CrossRef]
- Robinson, C.P.; Li, B.; Meng, Q.; Pain, M.T. Pattern classification of hand movements using time domain features of electromyography. In Proceedings of the 4th International Conference on Movement Computing, London, UK, 28–30 June 2017; ACM: New York, NY, USA, 2017. [Google Scholar]
- Hassan, H.F.; Abou-Loukh, S.J.; Ibraheem, I.K. Teleoperated robotic arm movement using electromyography signal with wearable myo armband. J. King Saud Univ. Eng. Sci. 2020, 32, 378–387. [Google Scholar] [CrossRef]
- Wahid, M.F.; Tafreshi, R.; Langari, R. A multi-window majority voting strategy to improve hand gesture recognition accuracies using electromyography signal. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 427–436. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Pei, Z.C.; Chen, W.H.; Wang, J.H.; Zhang, J.B.; Chen, Z.B. Toward generalization of sEMG-based pattern recognition: A novel feature extraction for gesture recognition. IEEE Trans. Instrum. Meas. 2022, 71, 2501412. [Google Scholar] [CrossRef]
- Xu, P.F.; Li, F.; Wang, H.P. A novel concatenate feature fusion RCNN architecture for sEMG-based hand gesture recognition. PLoS ONE 2022, 17, e0262810. [Google Scholar] [CrossRef] [PubMed]
- Xiong, B.P.; Chen, W.S.; Niu, Y.X.; Gan, Z.H.; Mao, G.J.; Xu, Y. A global and local feature fused CNN architecture for the sEMG-based hand gesture recognition. Comput. Biol. Med. 2023, 166, 107497. [Google Scholar] [CrossRef] [PubMed]
- Wei, W.T.; Wong, Y.K.; Du, Y.; Hu, Y.; Kankanhalli, M.; Geng, W.D. A multi-stream convolutional neural network for sEMG-based gesture recognition in muscle-computer interface. Pattern Recognit. Lett. 2019, 119, 131–138. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, P. A novel myoelectric pattern recognition strategy for hand function restoration after incomplete cervical spinal cord injury. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 96–103. [Google Scholar] [CrossRef] [PubMed]
- Li, J.Y.; Li, C.B.; Han, J.H.; Shi, Y.F.; Bian, G.B.; Zhou, S. Robust hand gesture recognition using HOG-9ULBP features and SVM model. Electronics 2022, 11, 988. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.-G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [PubMed]
- Karheily, S.; Moukadem, A.; Courbot, J.-B.; Abdeslam, D.O. sEMG time–frequency features for hand movements classification. Expert Syst. Appl. 2022, 210, 118282. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Y.; Yu, H.; Yang, X.D.; Lu, W. Learning effective spatial–temporal features for sEMG armband-based gesture recognition. IEEE Internet Things J. 2020, 7, 6979–6992. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Liang, S.; Chen, J.; Wu, Y.; Yan, S.F.; Huang, J.P. Recognition of subtle gestures by 2-channel sEMG using parameter estimation classifiers based on probability density. IEEE Access 2020, 8, 169835–169850. [Google Scholar] [CrossRef]
- Pizzolato, S.; Tagliapietra, L.; Cognolato, M.; Reggiani, M.; Müller, H.; Atzori, M. Comparison of six electromyography acquisition setups on hand movement classification tasks. PLoS ONE 2017, 12, e0186132. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Sliding Window Length (ms) | ||||
|---|---|---|---|---|---|
| 100 | 150 | 200 | 250 | 300 | |
| Processing time of feature extraction process (ms) | 35.4 | 27.8 | 20.2 | 12.6 | 5.1 |
| Processing time of classification process (ms) | 491.8 | 324.7 | 241.1 | 191.2 | 157.5 |
| Total processing time (ms) | 527.2 | 352.5 | 261.3 | 203.8 | 162.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Liu, S.; Li, X.; Qu, L.; Zhuang, B.; Han, G. Improving sEMG-Based Hand Gesture Recognition through Optimizing Parameters and Sliding Voting Classifiers. Electronics 2024, 13, 1322. https://doi.org/10.3390/electronics13071322
Zhang M, Liu S, Li X, Qu L, Zhuang B, Han G. Improving sEMG-Based Hand Gesture Recognition through Optimizing Parameters and Sliding Voting Classifiers. Electronics. 2024; 13(7):1322. https://doi.org/10.3390/electronics13071322
Chicago/Turabian StyleZhang, Ming, Shizhao Liu, Xiao Li, Leyi Qu, Bowen Zhuang, and Gujing Han. 2024. "Improving sEMG-Based Hand Gesture Recognition through Optimizing Parameters and Sliding Voting Classifiers" Electronics 13, no. 7: 1322. https://doi.org/10.3390/electronics13071322
APA StyleZhang, M., Liu, S., Li, X., Qu, L., Zhuang, B., & Han, G. (2024). Improving sEMG-Based Hand Gesture Recognition through Optimizing Parameters and Sliding Voting Classifiers. Electronics, 13(7), 1322. https://doi.org/10.3390/electronics13071322