

Autonomous Driving System Architecture with Integrated ROS2 and Adaptive AUTOSAR


Abstract
1. Introduction
2. Background and Related Works
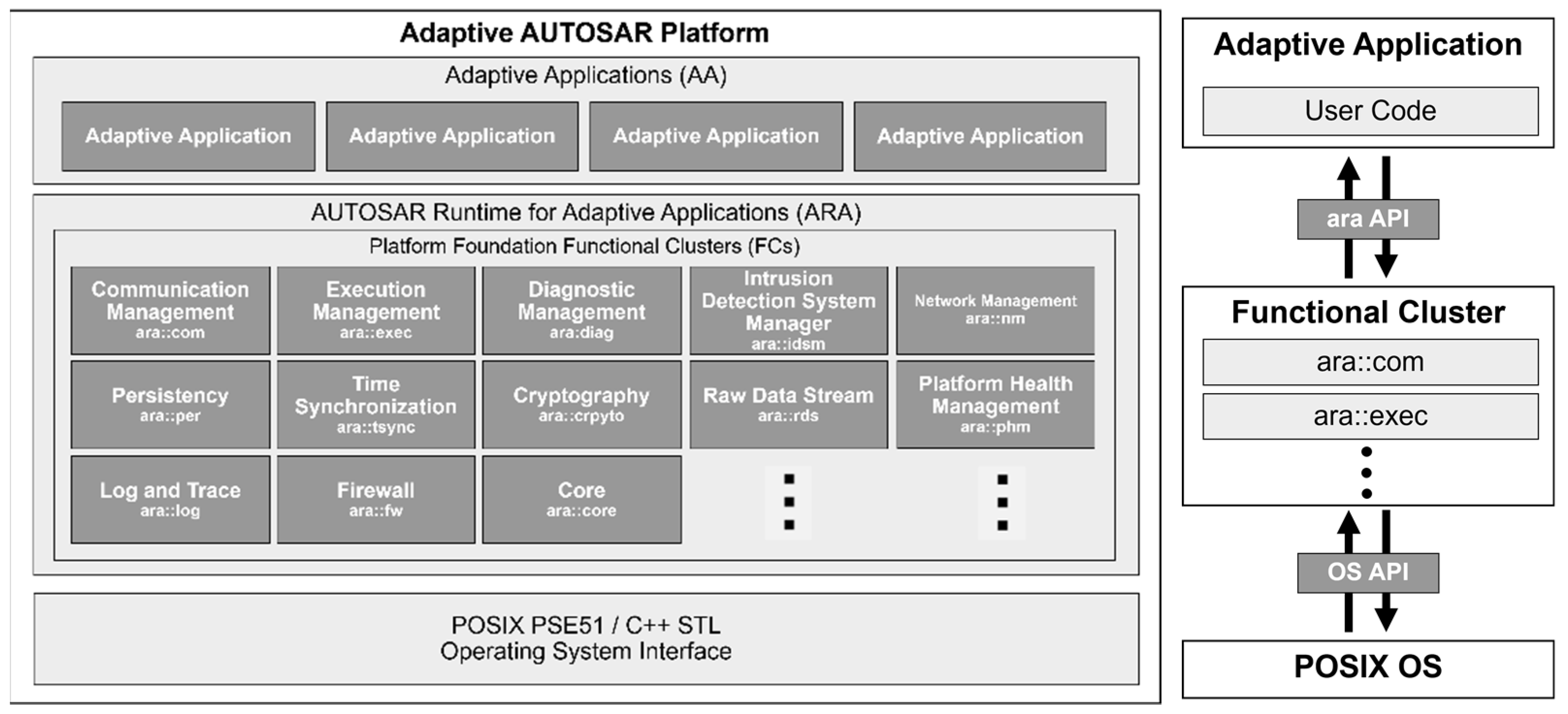
2.1. Adaptive AUTOSAR
2.2. ROS
2.2.1. ROS 1
2.2.2. ROS2
2.3. Related Works
3. System Architecture and Components
3.1. System Architecture
3.1.1. Adaptive AUTOSAR Platform
3.1.2. ROS2 Autonomous Driving Platform
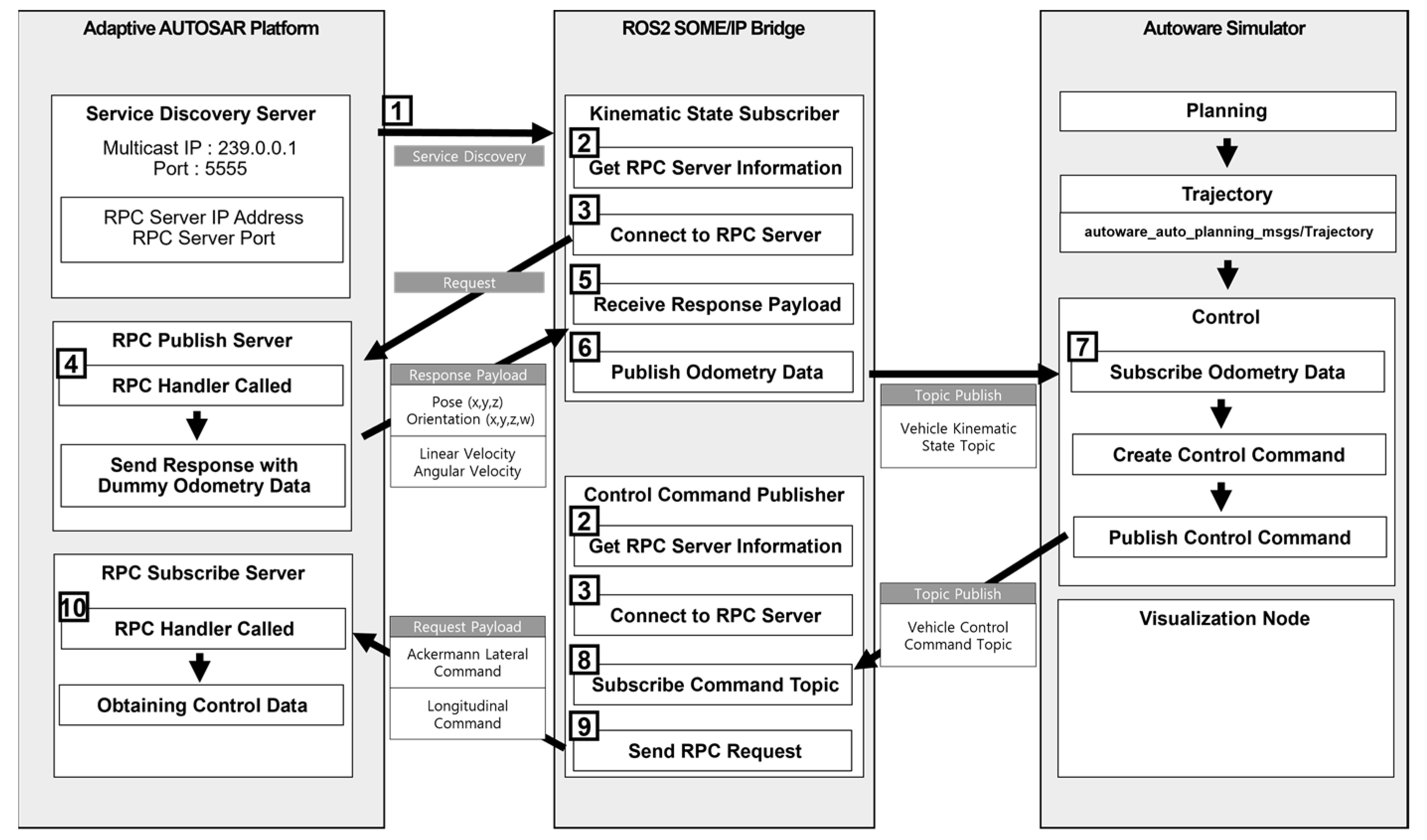
3.1.3. Data Flow
3.2. System Implementation
3.2.1. Writing ARXML for the Adaptive AUTOSAR Platform
3.2.2. Implementation of Adaptive Applications on an Adaptive AUTOSAR Platform
3.2.3. Implementation of ROS2 SOME/IP Bridge
4. System Validation
4.1. System Verification Environment
4.2. Validation Scenarios
4.3. System Verification
5. Conclusions and Future Improvements
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Navet, N.; Song, Y.; Simonot-Lion, F.; Wilwert, C. Trends in Automotive Communication Systems. Proc. IEEE 2005, 93, 1204–1223. [Google Scholar] [CrossRef]
- Vetter, A.; Obergfell, P.; Guissouma, H.; Grimm, D.; Rumez, M.; Sax, E. Development Processes in Automotive Service-oriented Architectures. In Proceedings of the 2020 9th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 8–11 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- AUTOSAR. Available online: http://www.autosar.org (accessed on 13 March 2024).
- The Open Group. The Open Group Base Specifications Issue 7, IEEE Std 1003.1™-2017 (POSIX.1-2017). 2018. Available online: https://pubs.opengroup.org/onlinepubs/9699919799.2018edition/ (accessed on 13 March 2024).
- AUTOSAR AP R17-03; Explanations of Adaptive Platform Design. Available online: https://www.autosar.org/fileadmin/standards/R22-11/AP/AUTOSAR_EXP_PlatformDesign.pdf (accessed on 13 March 2024).
- Open Source Robotics Foundation (OSRF). ROS. Available online: https://www.openrobotics.org/ (accessed on 13 March 2024).
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef]
- Kam, H.R.; Lee, S.; Park, T.; Kim, C. RViz: A toolkit for real domain data visualization. Telecommun. Syst. 2015, 60, 337–345. [Google Scholar] [CrossRef]
- TCPROS. Available online: http://wiki.ros.org/ROS/TCPROS (accessed on 13 March 2024).
- ROS Master. Available online: https://wiki.ros.org/Master (accessed on 13 March 2024).
- ROS.org—Open Source Robotics Foundation (OSRF). ROS2. Available online: https://index.ros.org/ (accessed on 13 March 2024).
- Bellavista, P.; Corradi, A.; Foschini, L.; Pernafini, A. Data Distribution Service (DDS): A performance comparison of OpenSplice and RTI implementations. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 000377–000383. [Google Scholar] [CrossRef]
- Becker, J.; Sagar, M.; Pangercic, D. A safety-certified vehicle OS to enable software-defined vehicles. In Automatisiertes Fahren 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 51–67. [Google Scholar]
- Apex.AI. Available online: https://www.apex.ai/ (accessed on 13 March 2024).
- Autoware. Available online: https://autoware.org/ (accessed on 13 March 2024).
- Autoware Github. Available online: https://github.com/autowarefoundation/autoware (accessed on 13 March 2024).
- Menard, C.; Goens, A.; Lohstroh, M.; Castrillon, J. Achieving Determinism in Adaptive AUTOSAR. In Proceedings of the 2020 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2020; pp. 822–827. [Google Scholar] [CrossRef]
- AUTOSAR. Adaptive Autosar Platform Design. Available online: https://www.autosar.org/fileadmin/standards/R23-11/AP/AUTOSAR_AP_EXP_PlatformDesign.pdf (accessed on 13 March 2024).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)—Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3. [Google Scholar]
- Point Cloud Library (PCL). Available online: https://pointclouds.org/ (accessed on 13 March 2024).
- Object Management Group (OMG). Available online: https://www.omg.org/ (accessed on 13 March 2024).
- Henle, J.; Stoffel, M.; Schindewolf, M.; Nägele, A.-T.; Sax, E. Architecture platforms for future vehicles: A comparison of ROS2 and Adaptive AUTOSAR. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 3095–3102. [Google Scholar] [CrossRef]
- Arestova, A.; Martin, M.; Kai-Steffen, J.; German, R. A service-oriented real-time communication scheme for AUTOSAR adaptive using OPC UA and time-sensitive networking. Sensors 2021, 21, 2337. [Google Scholar] [CrossRef] [PubMed]
- Adaptive-AUTOSAR Github. Available online: https://github.com/langroodi/Adaptive-AUTOSAR/wiki (accessed on 13 March 2024).
- AUTOSAR, R21-11; Specification of Manifest. Available online: https://www.autosar.org/fileadmin/standards/R21-11/AP/AUTOSAR_TPS_ManifestSpecification.pdf (accessed on 13 March 2024).
- AUTOSAR, R21-11; SOME/IP Service Discovery Protocol Specification. Available online: https://www.autosar.org/fileadmin/standards/R20-11/FO/AUTOSAR_PRS_SOMEIPServiceDiscoveryProtocol.pdf (accessed on 13 March 2024).
- lidarslam_ros2 Github. Available online: https://github.com/rsasaki0109/lidarslam_ros2 (accessed on 13 March 2024).
- TIER V4 Vector Map Builder. Available online: https://tools.tier4.jp/feature/vector_map_builder_ll2/ (accessed on 13 March 2024).
- Laser Segmentation. Available online: https://github.com/ajtudela/laser_segmentation (accessed on 14 March 2024).
- ROS2 Pointcloud Clustering and Segmentation for Autonomous Behaviour. Available online: https://github.com/noshluk2/ROS2-Point-Cloud-Clustering-and-Segmentation-for-Autonomous-Behaviour (accessed on 14 March 2024).
- Rahmani, M.; Steffen, R.; Tappayuthpijarn, K.; Steinbach, E.; Giordano, G. Performance analysis of different network topologies for in-vehicle audio and video communication. In Proceedings of the 2008 4th International Telecommunication Networking Workshop on QoS in Multiservice IP Networks, Venezia, Italy, 13–15 February 2008; pp. 179–184. [Google Scholar] [CrossRef]
- Lim, H.-T.; Völker, L.; Herrscher, D. Challenges in a future IP/Ethernet-based in-car network for real-time applications. In Proceedings of the 2011 48th ACM/EDAC/IEEE Design Automation Conference (DAC), San Diego, CA, USA, 5–10 June 2011; pp. 7–12. [Google Scholar]
- Vrbanić, F.; Miletić, M.; Tišljarić, L.; Ivanjko, E. Influence of variable speed limit control on fuel and electric energy consumption, and exhaust gas emissions in mixed traffic flows. Sustainability 2022, 14, 932. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Name | Description |
|---|---|
| COMMUNICATION CLUSTER | A communication cluster is the main element that describes the topological connection of ECUs connected by a communication medium. Nodes within a cluster share the same communication protocol. A communication cluster has one or more physical channels. |
| ETHERNET-PHYSICAL-CHANNEL | Ethernet/physical channels represent VLANs or untagged channels. |
| NETWORK-ENDPOINTS | A network endpoint defines an IP address or MAC multicast address, for example. |
| PROVIDED-SOMEIP-SERVICE-INSTANCE | The existence and configuration of service instances implemented on top of SOME/IP. |
| PROVIDED-EVENT-GROUPS | For each event group, configure the communication settings for the service instance. |
| SD-SERVER-CONFIG | Configure settings related to the SD Server. |
| INITIAL-OFFER-BEHAVIOR | Configure settings related to the server’s OFFER BEHAVIOR and the client’s FIND BEHAVIOR. |
| INITIAL-DELAY-MIN-VALUE | Sets the minimum time (in seconds) to randomly delay the first OFFER BEHAVIOR. This applies to the SD Server’s Initial Offer or the SD Client’s find message. |
| INITIAL-DELAY-MAX-VALUE | Sets the maximum time (in seconds) to randomly delay the first OFFER BEHAVIOR. This applies to the SD Server’s Initial Offer or the SD Client’s find message. |
| Component Name | Description |
|---|---|
| position_x, y, z | Contains the current location of the vehicle. Sent in the UTM coordinate system used by the Autoware Simulator. |
| orientation_x, y, z, w | Information indicating the direction of the vehicle. Represented as a quaternion. |
| linearVelocity_x, y, z | Information about the vehicle’s Linear Velocity along the X, Y, and Z axes. |
| angularVelocity_x, y, z | Information about the vehicle’s Angular Velocity along the X, Y, and Z axes. |
| Component Name | Description |
|---|---|
| steering_tire_angle | Represents the steering angle, which is the angle between the front wheels of the vehicle and the vehicle body. |
| steering_tire_rotation_rate | Rotational speed of the steering wheel. |
| acceleration | Acceleration of the vehicle. |
| jerk | Rate of change in the vehicle’s acceleration. |
| Type | SD Type |
|---|---|
| Service ID | Service Unique ID in vehicle |
| Instance ID | Instance ID under service |
| IPv4/6 Address | Endpoint IP Address of SOME/IP Server |
| L4-Proto | Transport Layer Protocol |
| Port Number | Endpoint Port of SOME/IP Server |
| Topic Type | Description |
|---|---|
| geometry_msgs/PoseWithCovariance pose | Represents the current position and Orientation (Pose) of the vehicle. A Pose consists of a position (X, Y, Z) and a direction (quaternion). |
| geometry_msgs/TwistWithCovariance twist | Fields representing the Linear and Angular Velocities of the vehicle, including the speed of travel and rotation. Linear and Angular Velocities are organized as three-dimensional vectors. |
| Topic Name | Description |
|---|---|
| AckermannLateralCommand | Represents the vehicle’s lateral control commands based on the Ackermann drive mechanism. This includes commands related to the steering angle of the vehicle. |
| LongitudinalCommand | Represents commands for the longitudinal control of the vehicle. This includes commands related to vehicle speed, acceleration, and braking. |
| From | To | Frequency | Average Delay | Peak Delay |
|---|---|---|---|---|
| Adaptive AUTOSAR Platform | Kinematic State Subscriber | 50 Hz | 10.95 ms | 13.45 ms |
| Vehicle Command Publisher | Adaptive AUTOSAR Platform | 20 Hz | 5.19 ms | 8.77 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, D.; Moon, C. Autonomous Driving System Architecture with Integrated ROS2 and Adaptive AUTOSAR. Electronics 2024, 13, 1303. https://doi.org/10.3390/electronics13071303
Hong D, Moon C. Autonomous Driving System Architecture with Integrated ROS2 and Adaptive AUTOSAR. Electronics. 2024; 13(7):1303. https://doi.org/10.3390/electronics13071303
Chicago/Turabian StyleHong, Dongwon, and Changjoo Moon. 2024. "Autonomous Driving System Architecture with Integrated ROS2 and Adaptive AUTOSAR" Electronics 13, no. 7: 1303. https://doi.org/10.3390/electronics13071303
APA StyleHong, D., & Moon, C. (2024). Autonomous Driving System Architecture with Integrated ROS2 and Adaptive AUTOSAR. Electronics, 13(7), 1303. https://doi.org/10.3390/electronics13071303