



Grid Forming Technologies to Improve Rate of Change in Frequency and Frequency Nadir: Analysis-Based Replicated Load Shedding Events



Abstract
1. Introduction
Contribution and Paper Organization
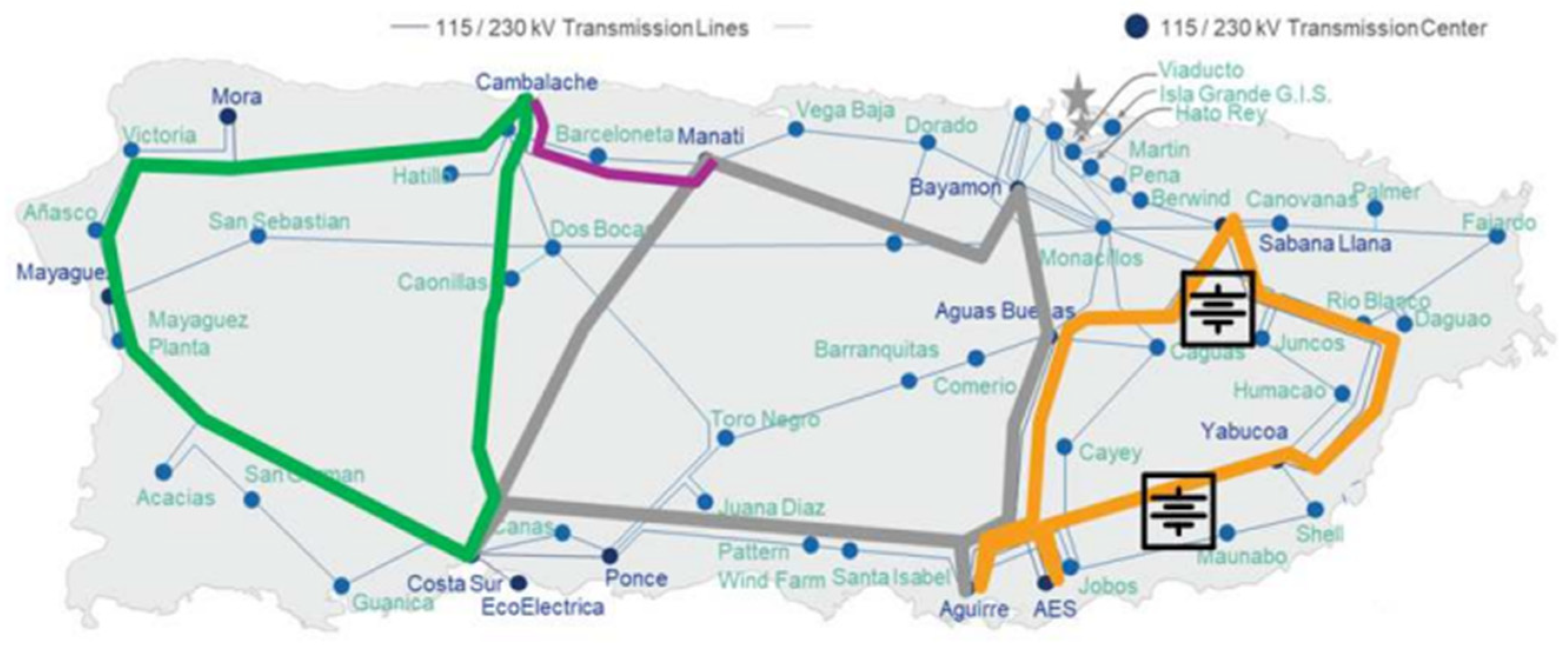
2. System Response—Real Events Monitored
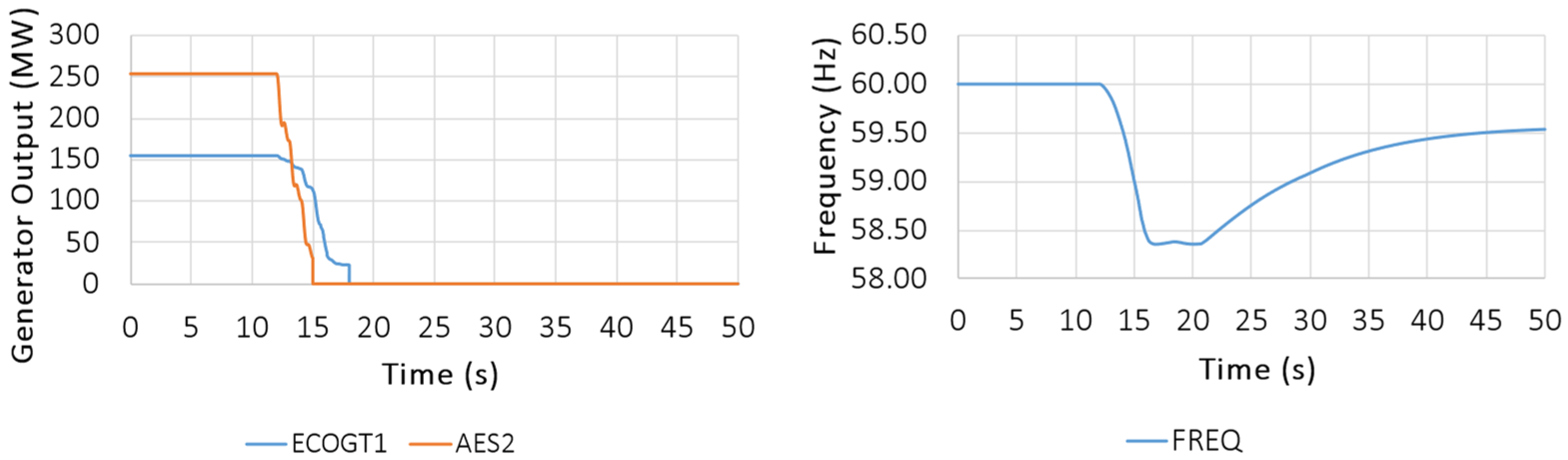
2.1. Event I: Loss of Two Generation Units
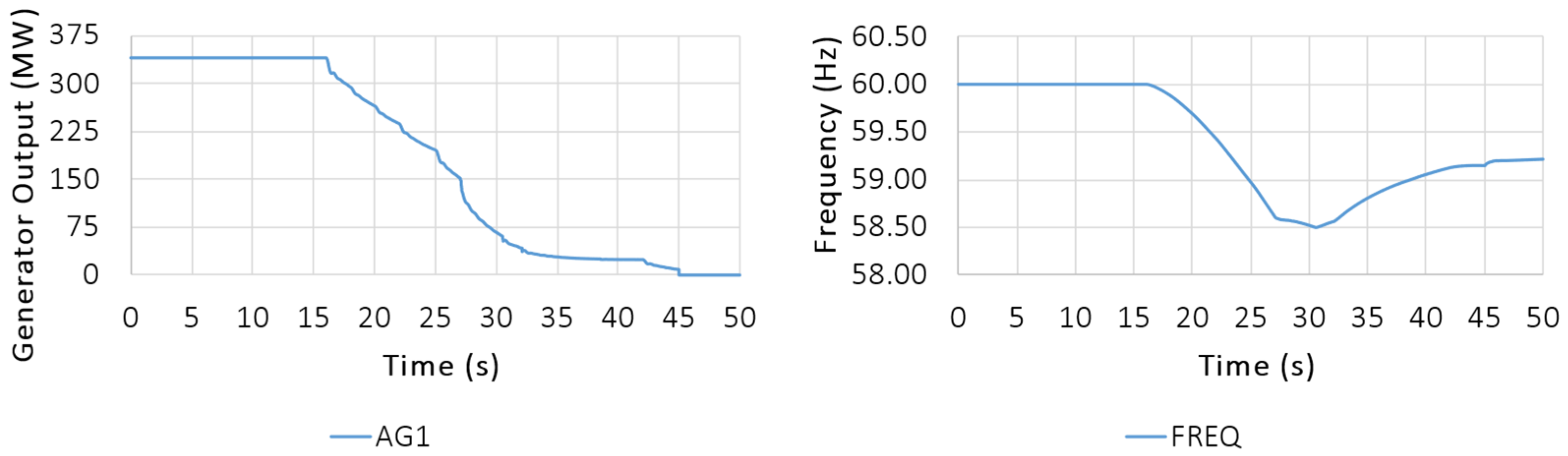
2.2. Event II: Loss of Slack Generation Unit
3. GFM Resources for Grid Stability
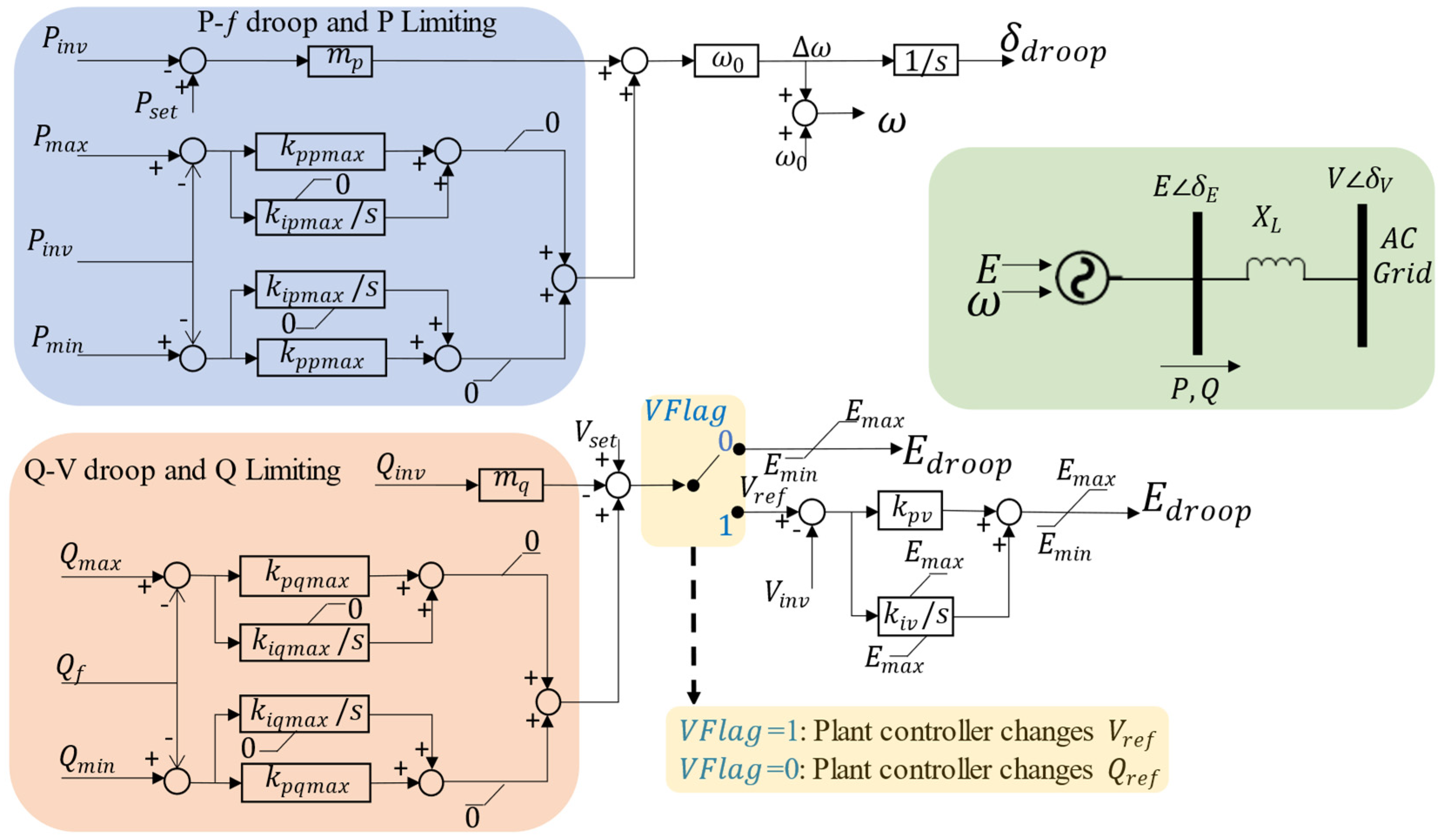
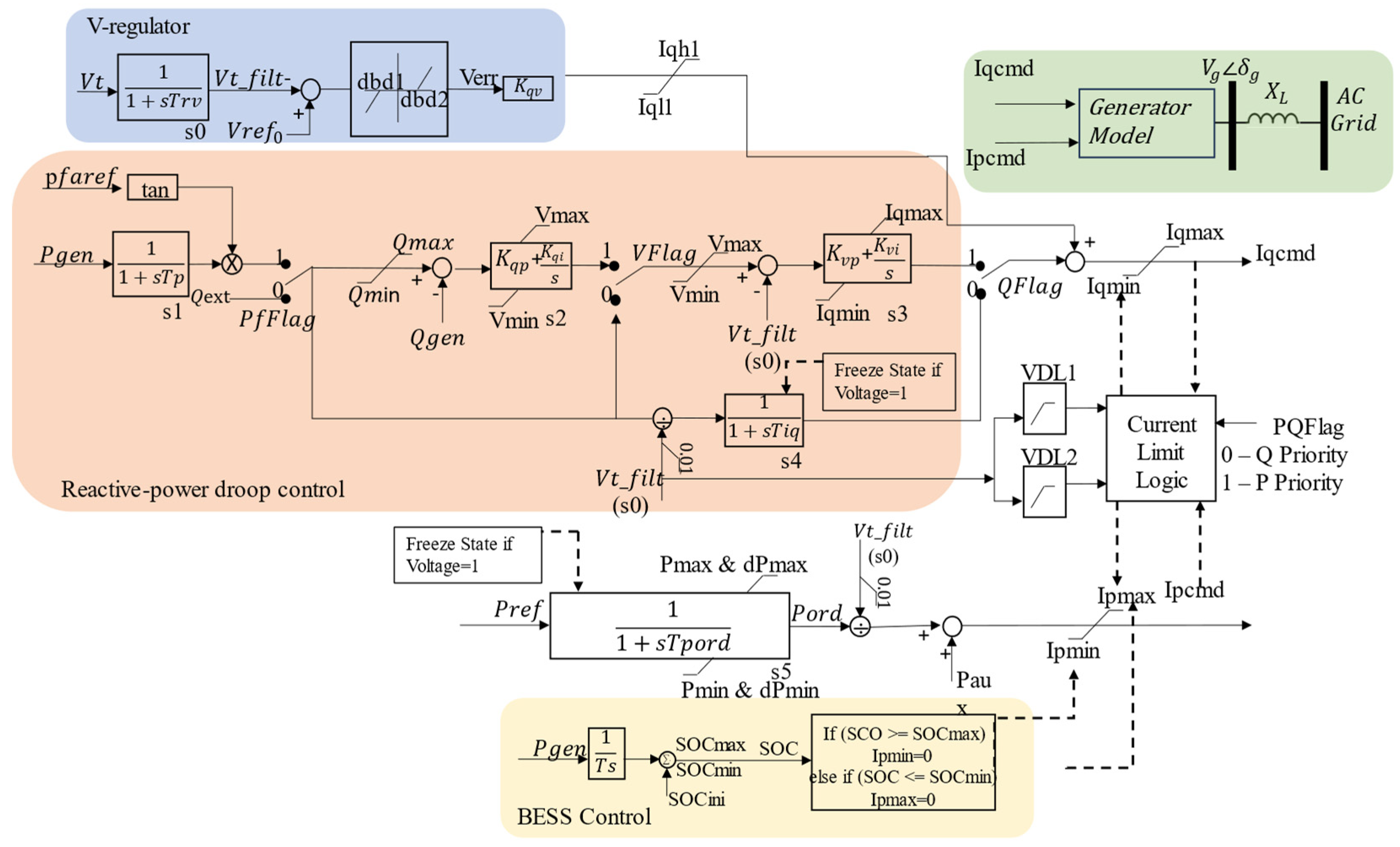
3.1. GFM Model
3.2. GFL Model
3.3. Test Scenarios
4. Analysis Results for Events Replication and GFM Technology Implementation
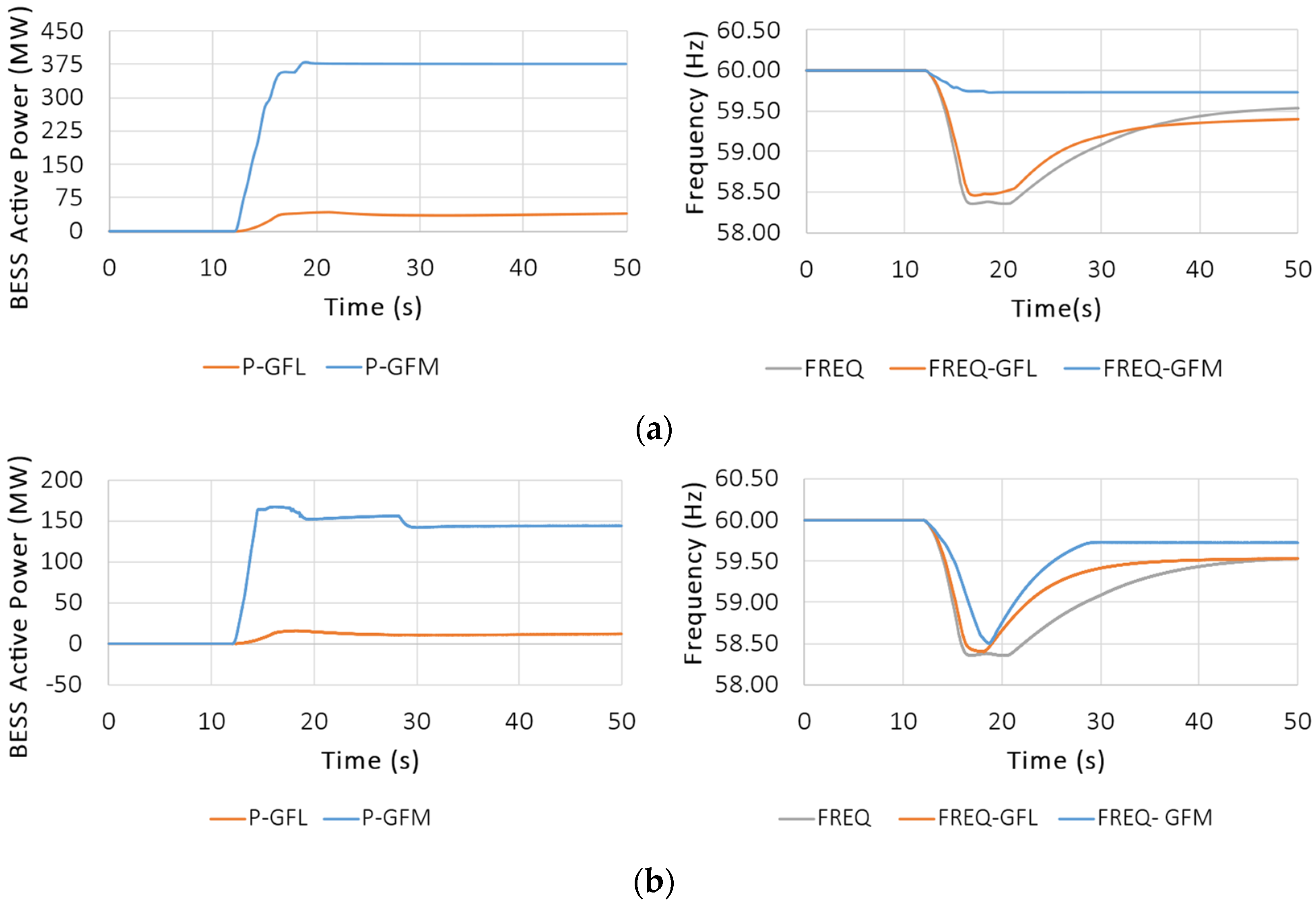
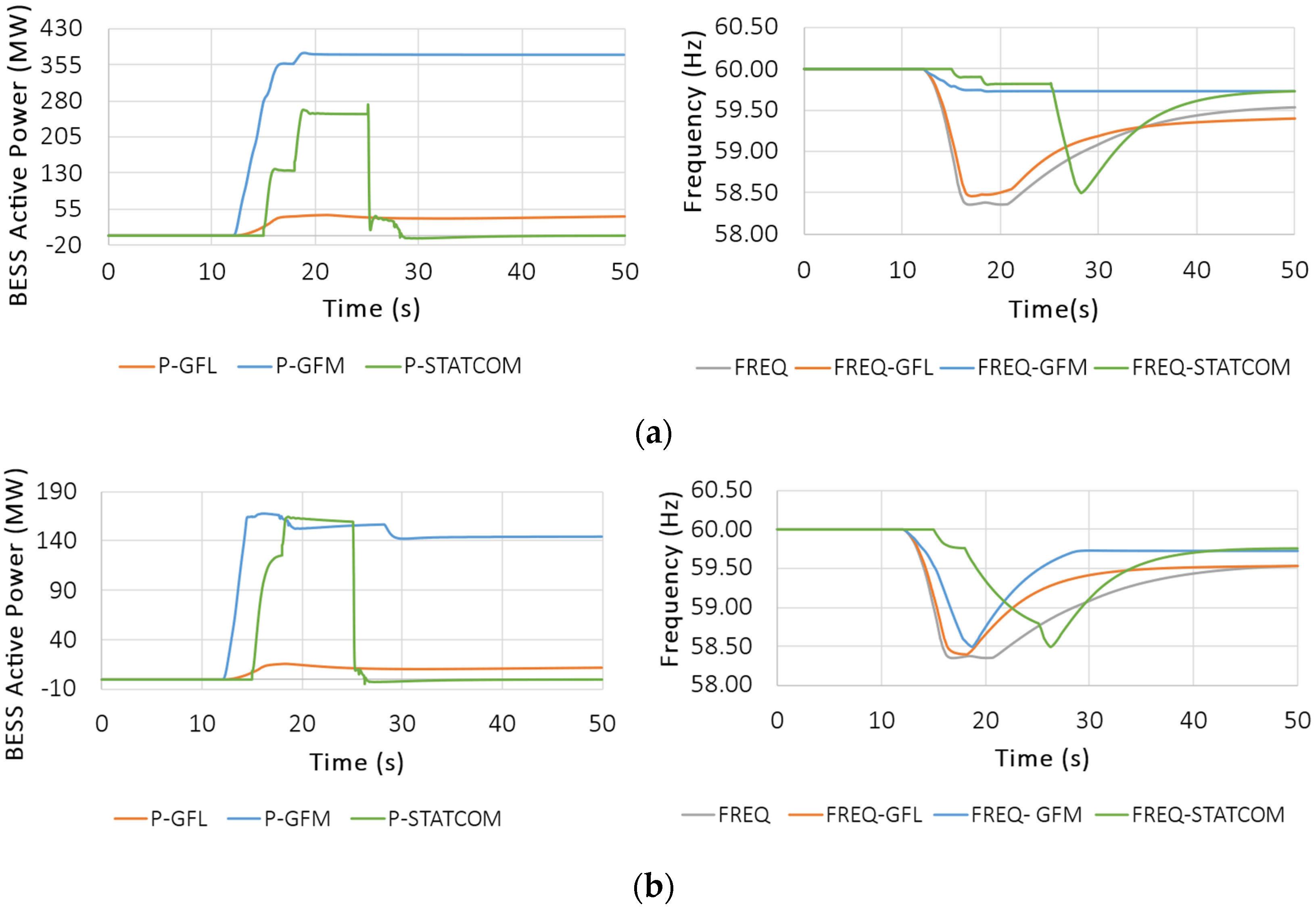
4.1. Event I: Loss of Two Generation Units
4.1.1. Idling State Mode
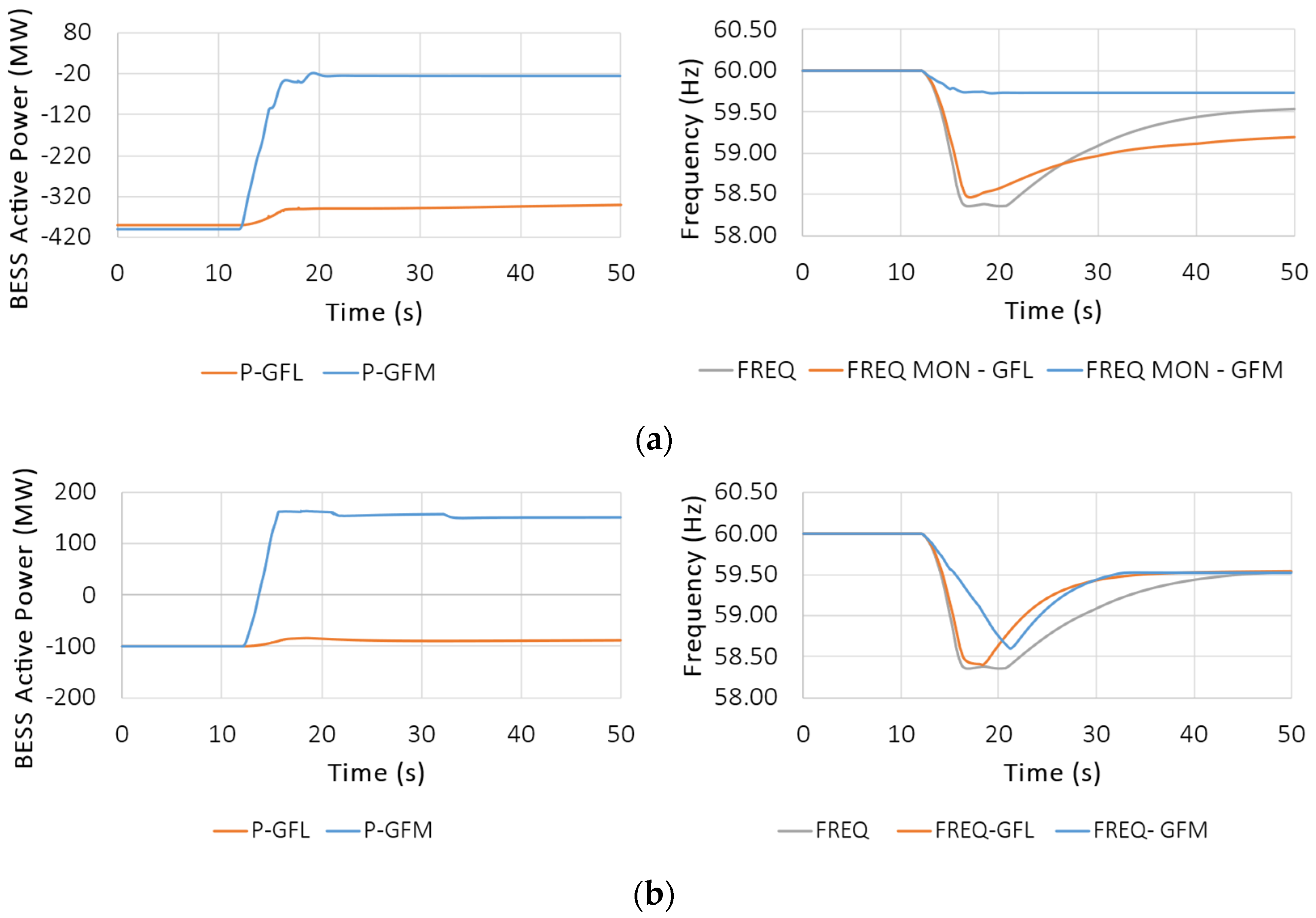
4.1.2. Charging Mode
4.1.3. Discharging Mode
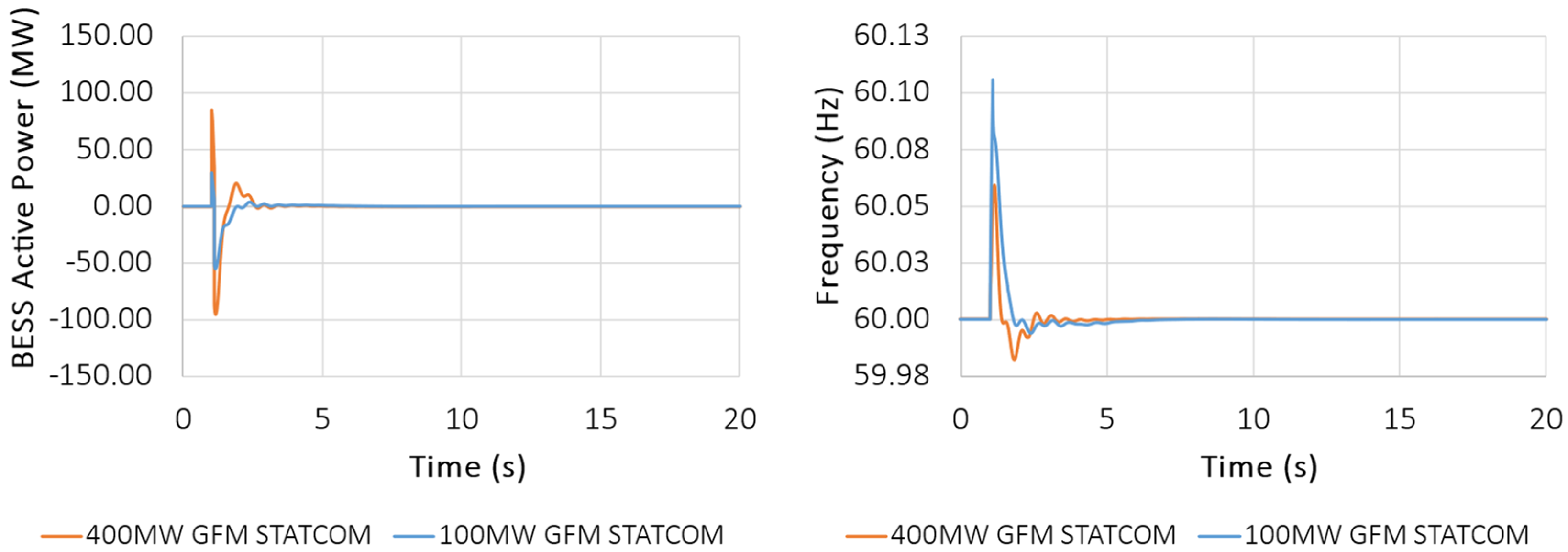
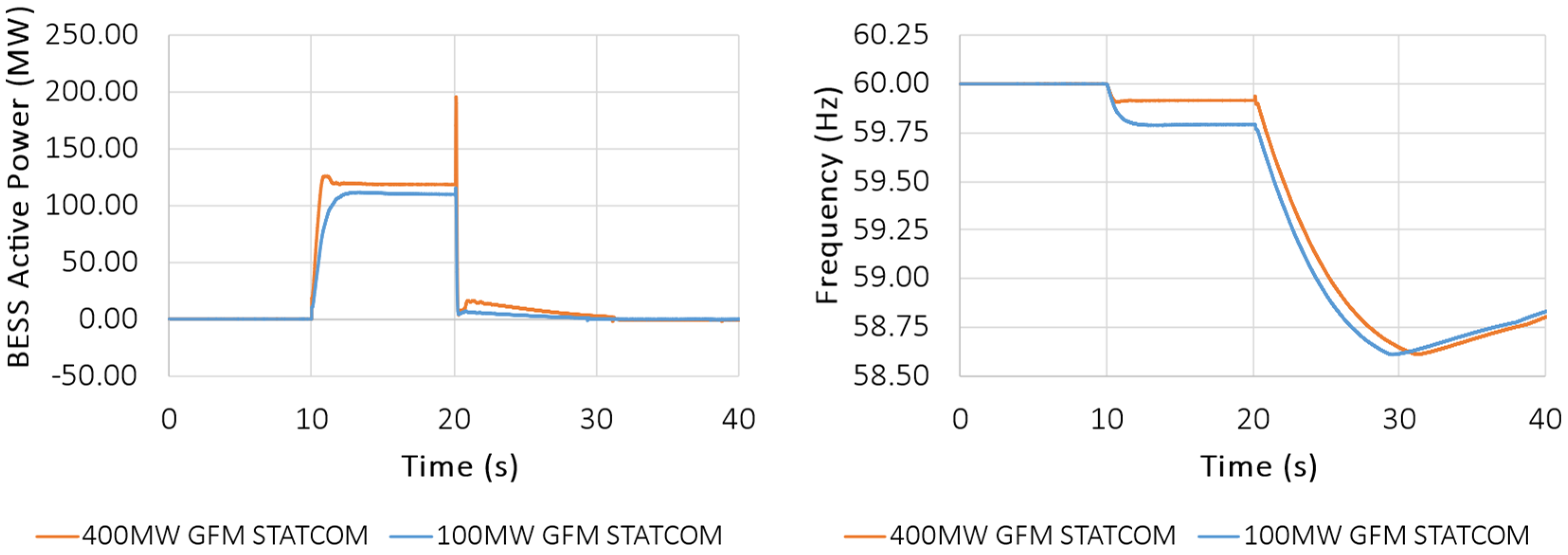
4.1.4. STATCOM Response
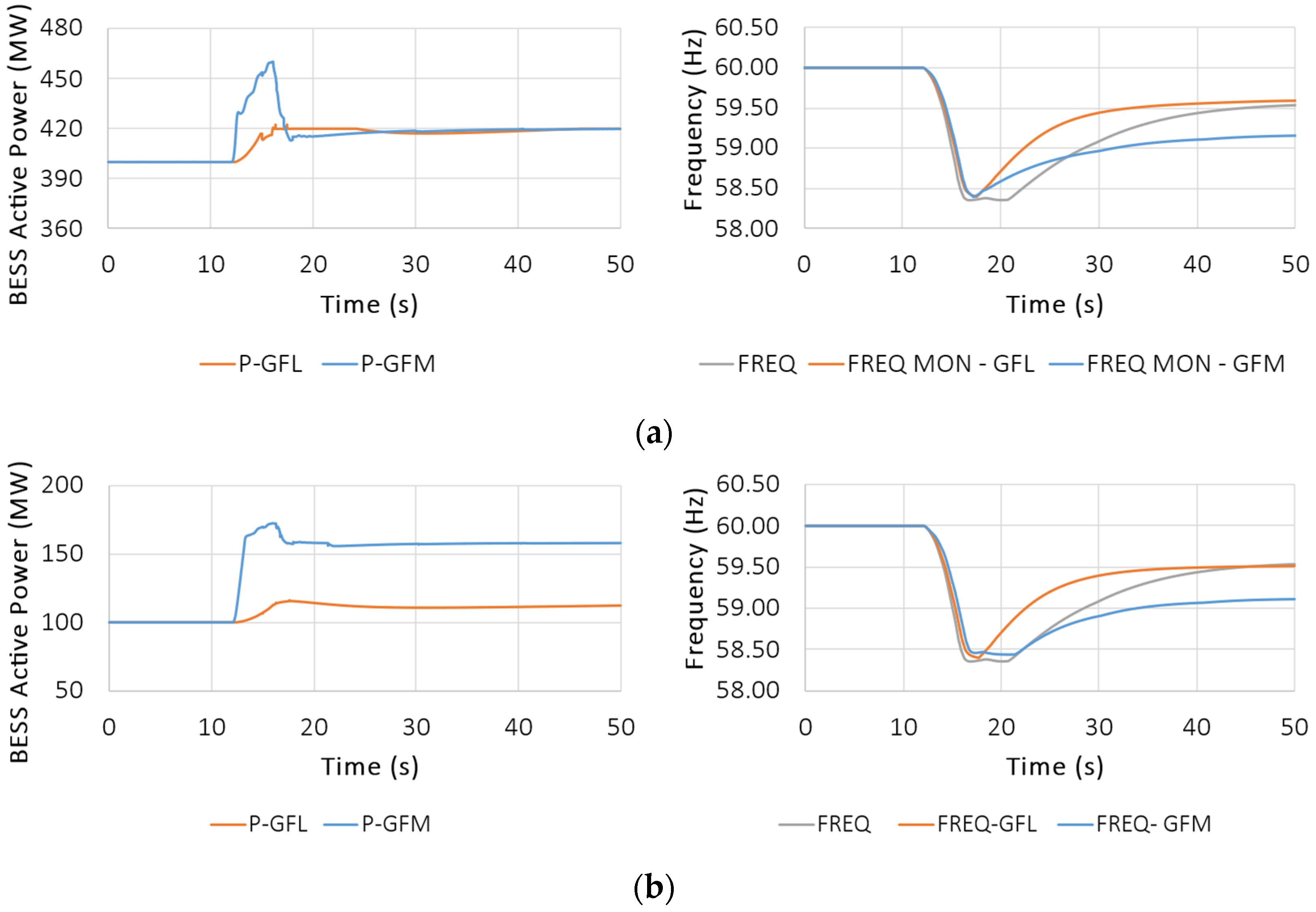
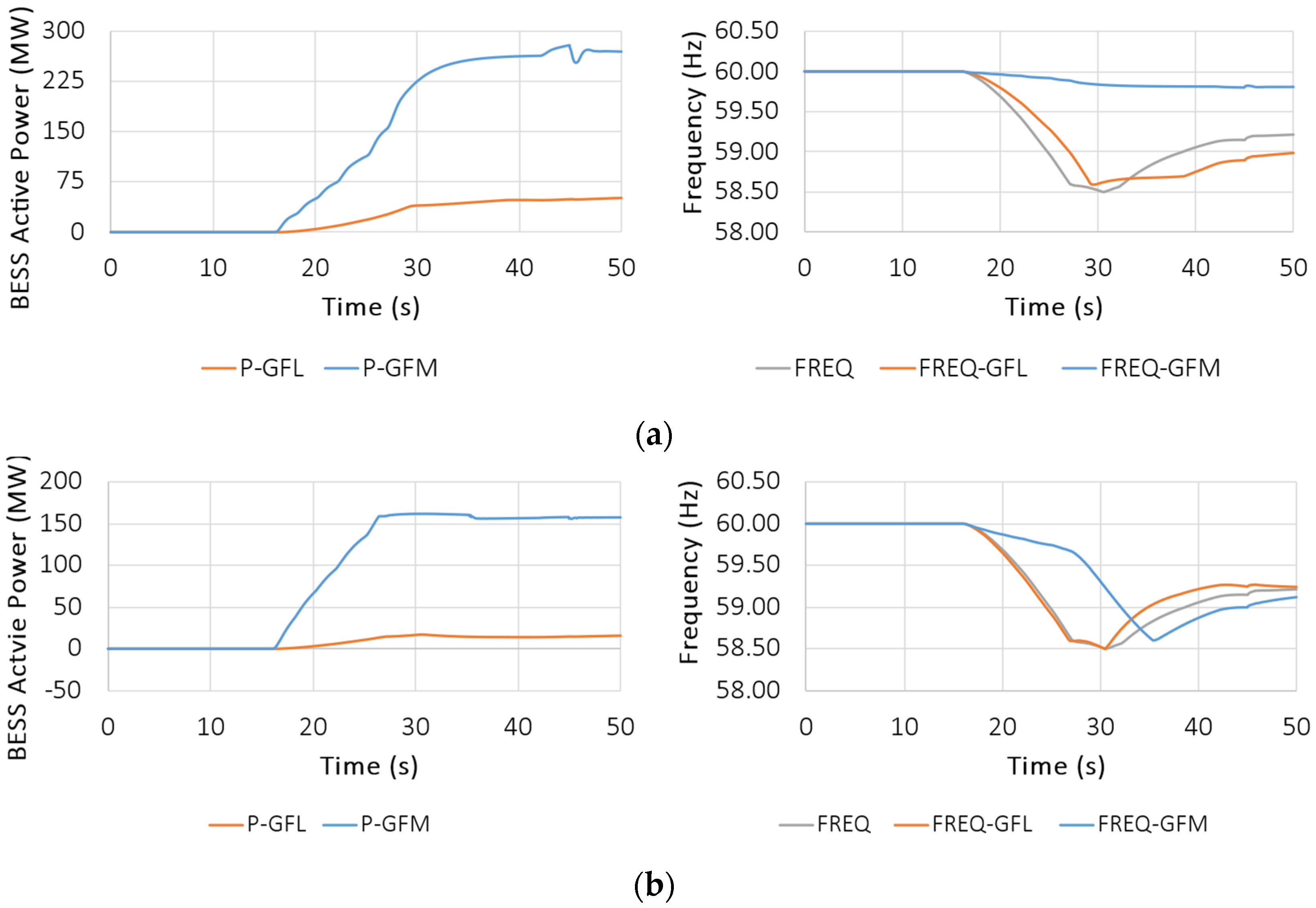
4.2. Event II: Loss of One Generation Unit
4.2.1. Idling State Mode
4.2.2. Charging Mode
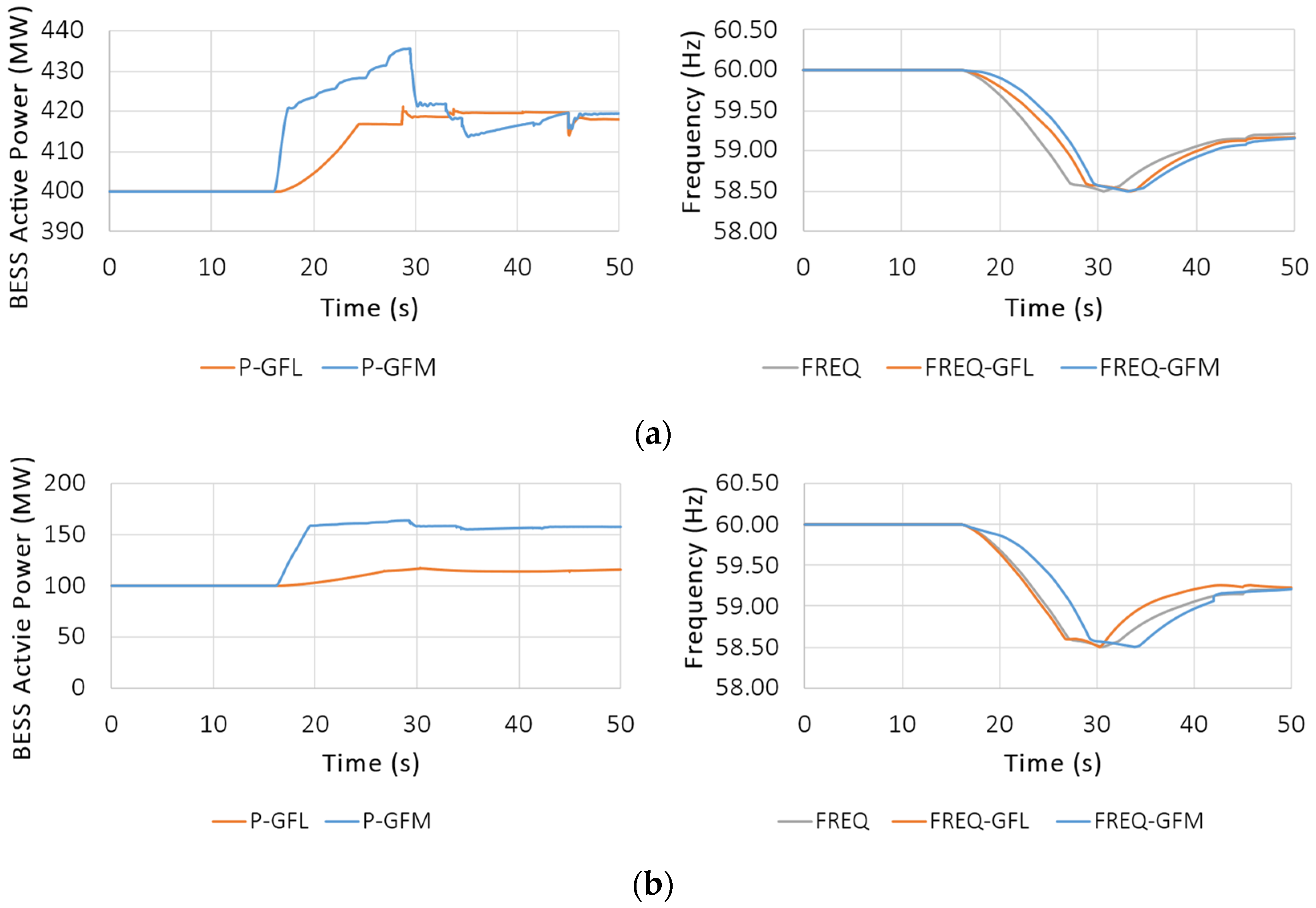
4.2.3. Discharging Mode
4.2.4. STATCOM Response
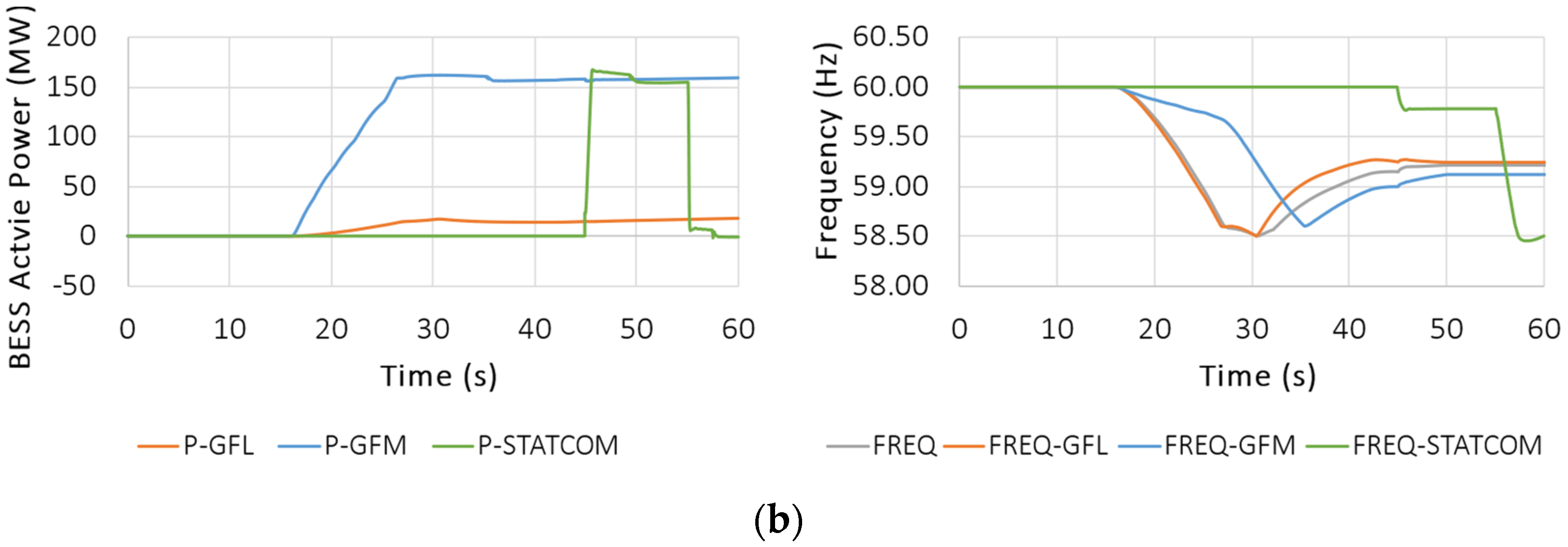
4.3. Additional Analysis of the STATCOM Response
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mahamedi, B.; Fletcher, J.E. The equivalent models of grid-forming inverters in the sequence domain for the steady-state analysis of power systems. IEEE Trans. Power Syst. 2020, 35, 2876–2887. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- North American Electric Reliability Corporation (NERC). Protection System Response to Power Swings; NERC System Protection and Control Subcommittee Report; North American Electric Reliability Corporation (NERC): Atlanta, GA, USA, 2013. [Google Scholar]
- Sadamoto, T.; Chakrabortty, A.; Ishizaki, T.; Imura, J.I. Dynamic modeling, stability, and control of power systems with distributed energy resources. arXiv 2018, arXiv:1804.04933. [Google Scholar]
- Lin, Y.; Eto, J.H.; Johnson, B.B.; Flicker, J.D.; Lasseter, R.H.; Villegas Pico, H.N.; Seo, G.S.; Pierre, B.J.; Ellis, A. Research Roadmap on Grid-Forming Inverters; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2020. [Google Scholar]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. Current limiting control with enhanced dynamics of grid-forming converters during fault conditions. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1062–1073. [Google Scholar] [CrossRef]
- Martínez-Gómez, M.; Burgos-Mellado, C.; Morales-Paredes, H.K.; Gómez, J.S.; Verma, A.K.; Bonaldo, J.P. Distributed Control Scheme for Clusters of Power Quality Compensators in Grid-Tied AC Microgrids. Sustainability 2023, 15, 15698. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Wang, Z.; Zhang, L.; Wu, K.; Hu, J. Transient stability analysis and control design of droop-controlled voltage source converters considering current limitation. IEEE Trans. Smart Grid 2017, 10, 578–591. [Google Scholar] [CrossRef]
- Ma, S.; Geng, H.; Liu, L.; Yang, G.; Pal, B.C. Grid-synchronization stability improvement of large-scale wind farm during severe grid fault. IEEE Trans. Power Syst. 2017, 33, 216–226. [Google Scholar] [CrossRef]
- Zhang, W. Control of Grid Connected Power Converters with Grid Support Functionalities; Universitat Politècnica de Catalunya: Barcelona, Spain, 2017. [Google Scholar]
- Wang, L.; Truong, D.N. Stability enhancement of DFIG-based offshore wind farm fed to a multi-machine system using a STATCOM. IEEE Trans. Power Syst. 2013, 28, 2882–2889. [Google Scholar] [CrossRef]
- Bak-Jensen, B.; El-Moursi, M.S.; Abdel-Rahman, M.H. Novel STATCOM controller for mitigating SSR and damping power system oscillations in a series compensated wind parks. IEEE Trans. Power Electron. 2010, 25, 429–441. [Google Scholar]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-synchronization stability of converter-based resources—An overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]
- Zhao, F.; Wang, X.; Zhou, Z.; Kocewiak, Ł.; Svensson, J.R. Comparative study of battery-based STATCOM in grid-following and grid-forming modes for stabilization of offshore wind power plant. Electr. Power Syst. Res. 2022, 212, 108449. [Google Scholar] [CrossRef]
- Nassif, A.B.; Lelic, M.; Kushner, D.; Paaso, A. Reliability Challenges and Improvement Strategies in Puerto Rico. In Proceedings of the 2023 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 16 January 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Nassif, A.B.; Rahmatian, M.; Paaso, A.; Othman, H.; Gevorgian, V.; Fan, X.; Elizondo, M.; Du, W. Improving Frequency Stability and Minimizing Load Shedding Events by Adopting Grid-Scale Energy Storage with Grid Forming Inverters. In Proceedings of the 2023 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT-LA), San Juan, Puerto Rico, 6–9 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 5–9. [Google Scholar]
- Nassif, A.B.; Daneshpooy, A.; Othman, H.; Vu, K.; Paaso, A. A Resilience Driven Multi-Objective Approach for Optimal Placement of Energy Storage in Islanded Transmission Networks. In Proceedings of the 2023 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT-LA), San Juan, Puerto Rico, 6–9 November 2023; pp. 15–19. [Google Scholar]
- Zhang, H.; Xiang, W.; Lin, W.; Wen, J. Grid forming converters in renewable energy sources dominated power grid: Control strategy, stability, application, and challenges. J. Mod. Power Syst. Clean Energy 2021, 9, 1239–1256. [Google Scholar] [CrossRef]
- Nassif, A.; Rahmatian, M.; Othman, H.; Paaso, A. Improvement of Frequency Nadir and RoCoF in Puerto Rico under High IBR Scenarios by Using Grid-Forming Capabilities. In Proceedings of the CIGRE Grid of the Future Symposium, Chicago, IL, USA, 7–10 November 2022. [Google Scholar]
- Lasseter, R.H.; Eto, J.H.; Schenkman, B.; Stevens, J.; Vollkommer, H.; Klapp, D.; Linton, E.; Hurtado, H.; Roy, J. CERTS microgrid laboratory test bed. IEEE Trans. Power Deliv. 2010, 26, 325–332. [Google Scholar] [CrossRef]
- Du, W.; Lasseter, R.H.; Khalsa, A.S. Survivability of autonomous microgrid during overload events. IEEE Trans. Smart Grid 2018, 10, 3515–3524. [Google Scholar] [CrossRef]
- Kenyon, R.W.; Sajadi, A.; Hoke, A.; Hodge, B.M. Open-source PSCAD grid-following and grid-forming inverters and a benchmark for zero-inertia power system simulations. In Proceedings of the 2021 IEEE Kansas Power and Energy Conference (KPEC), Manhattan, KS, USA, 19 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Nassif, A.B. Load Rejection Overvoltage of Distribution-Connected IBRs. IEEE Trans. Power Deliv. 2022, 37, 5488–5491. [Google Scholar] [CrossRef]
- SIEMENS Industry. Model Library PSSE 33; Siemens Power Technologies International: Schenectady, NY, USA, 2020; pp. 1–734. [Google Scholar]
- Avdiaj, E.; Beerten, J. Control of MMC-based Grid-Forming STATCOM with DC supercapacitors for energy storage. In Proceedings of the 2023 IEEE Belgrade PowerTech, Belgrade, Serbia, 25 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Du, W.; Liu, Y.; Tuffner, F.K.; Huang, R.; Huang, Z. Model Specification of Droop-Controlled, Grid-Forming Inverters (GFMDRP_A); Pacific Northwest National Laboratory: Richland, WA, USA, 2021. [Google Scholar]
- NERC White Paper: Grid Forming Functional Specifications for BPS-Connected Battery Energy Storage Systems, September 2023. Available online: https://www.nerc.com/comm/RSTC_Reliability_Guidelines/White_Paper_GFM_Functional_Specification.pdf (accessed on 14 January 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kV | 13.2 | 8.32 | 7.2 | 4.16 | Total | Customers |
|---|---|---|---|---|---|---|
| OH miles | 2553 | 3673 | 414 | 6497 | 13,154 | 1,459,132 |
| UG miles | 2459 | 346 | 60 | 434 | 3299 |
| Transmission Lines | Line/Segment Count | Length [Miles] |
|---|---|---|
| 38-kV | 185/285 | 1563 |
| 115-kV | 46/99 | 711 |
| 230-kV | 12/18 | 424 |
| Total | 243/402 | 2698 |
| Variables | Description | Value |
|---|---|---|
| Q-V Droop gain | 0.02 | |
| Proportional gain for voltage controller | 0.0 | |
| Integral gain for voltage controller (>0) | 5.86 | |
| Proportional gain of the Pmax and Pmin controller | 0.01 | |
| Integral gain of the Pmax and Pmin controller | 0.1 | |
| Pmax | Upper limit of the inverter’s active power control | 1.0 |
| Pmin | Lower limit of the inverter’s active power control | −1.0 |
| Pset | Power Set Point | --- |
| Emax | Upper limit of the output of the voltage controller | 1.25 |
| Emin | Lower limit of the output of the voltage controller | 0 |
| Vset | Voltage Set point | --- |
| Qmax | Upper limit of the inverter reactive power control | 1 |
| Qmin | Lower limit of the inverter reactive power control | −1 |
| Proportional gain of the Qmax and Qmin controller | 3 | |
| Integral gain of the Qmax and Qmin controller | 20 | |
| Frequency |
| Variables | Description | Value |
|---|---|---|
| dbd1 | Voltage error dead band lower threshold (≤0) | −0.15 |
| dbd2 | Voltage error dead band upper threshold (≥0) | 0.15 |
| Kqv | Reactive current injection gain during over and undervoltage conditions | 2.0 |
| Iqhl | Maximum limit of reactive current injection | 1.0 |
| Iqll | Minimum limit of reactive current injection | −1.0 |
| User-defined reference | 1.0 | |
| Tp | Filter time constant for electrical power (s) | 0.1310 |
| Qmax | Reactive power limit maximum | 1.0 |
| Qmin | Reactive power limit minimum | −1.0 |
| Vmax | Voltage control maximum | 1.5 |
| Vmin | Voltage control minimum | 0 |
| Kqp | Proportional gain on Q control | 0.3301 |
| Kqi | Integral gain on Q control | 1.49 |
| Kvp | Proportional gain on V control | 0 |
| Kvi | Integral gain on V control | 0 |
| Tiq | Time constant on delay s4 | 0.014 |
| dPmax | Positive Ramp rate on power reference | 0.0017 |
| dPmin | Negative Ramp rate on power reference | −0.0017 |
| Pmax | Maximum power reference | 1.0 |
| Pmin | Minimum power reference | −1.0 |
| Tpord | Filter time constant on Pord (s) | 0.001 |
| T | Battery discharge time (s) | 100 |
| SOCini | Initial state of charge | 0.5 |
| SOCmax | Maximum allowable state of charge | 1.0 |
| SOCmin | Minimum allowable state of charge | −1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garzon, O.D.; Nassif, A.B.; Rahmatian, M. Grid Forming Technologies to Improve Rate of Change in Frequency and Frequency Nadir: Analysis-Based Replicated Load Shedding Events. Electronics 2024, 13, 1120. https://doi.org/10.3390/electronics13061120
Garzon OD, Nassif AB, Rahmatian M. Grid Forming Technologies to Improve Rate of Change in Frequency and Frequency Nadir: Analysis-Based Replicated Load Shedding Events. Electronics. 2024; 13(6):1120. https://doi.org/10.3390/electronics13061120
Chicago/Turabian StyleGarzon, Oscar D., Alexandre B. Nassif, and Matin Rahmatian. 2024. "Grid Forming Technologies to Improve Rate of Change in Frequency and Frequency Nadir: Analysis-Based Replicated Load Shedding Events" Electronics 13, no. 6: 1120. https://doi.org/10.3390/electronics13061120
APA StyleGarzon, O. D., Nassif, A. B., & Rahmatian, M. (2024). Grid Forming Technologies to Improve Rate of Change in Frequency and Frequency Nadir: Analysis-Based Replicated Load Shedding Events. Electronics, 13(6), 1120. https://doi.org/10.3390/electronics13061120