1. Introduction
Over the decades, the increase in nonlinear loads, such as LED lighting systems, frequency inverters, and rectifiers, has introduced harmonic components into power systems. These components have significant negative effects on the operation of equipment supplied by waveforms distorted by harmonics [
1].
The continuous evolution of power systems, along with the growing use of nonlinear loads, has highlighted the importance of harmonic distortion and its potential to affect system performance and reliability. This emphasizes the need to develop HSE methodologies to identify harmonic sources, allowing for their treatment and mitigation.
In 1970, initial efforts in the field of power system state estimation by [
2,
3,
4] provided a fundamental framework to address these challenges, setting a benchmark for future research in HSE. The main advantage of this methodology lies in its ability to provide a comprehensive framework for system analysis, although its direct applicability to HSE was limited due to the lack of focus on harmonic distortions.
Subsequent advancements were made by [
5] in 1989, who introduced a new state estimation technique specifically aimed at identifying harmonic sources, a crucial development in the field of HSE. However, the effectiveness of this approach was contingent upon the quality of the available measurement data.
In 1991, Beides and Heydt [
6] expanded the scope of HSE by incorporating the Kalman filter for a dynamic estimation of harmonic states. This innovation allowed for adaptation to the dynamic variations of systems, although challenges related to computational complexity and the need for accurate modeling limited its applicability.
The exploration of the potential of neural networks by Hartana and Richards [
7] in 1990 introduced an adaptive methodology for monitoring and identifying harmonic sources, noted for its flexibility. The main limitation, however, was the dependence on the quality of training data and the specific architecture of the neural network used.
Advancing HSE using the least squares method, a hybrid nonlinear method based on the least squares method and Kirchhoff’s current laws was introduced by [
8]. One of the main disadvantages noted was that the accuracy of the estimate decreased with the harmonic order to be estimated.
In 1992, artificial neural networks were also used by [
9] for the estimation of harmonic voltages. The results were compared with those obtained with known methods up to that time, yielding good results in terms of accuracy.
A methodology using the least squares method in conjunction with Singular Value Decomposition (SVD) was presented by Lobos et al. [
10]. Despite satisfactory results, this technique requires greater computational effort and longer processing time than other techniques.
In 2004, the SVD technique was applied to the three-phase HSE of partially observable electrical systems [
11]. Although the technique proved reliable and computationally stable, the SVD technique requires more time and processing cost than traditional techniques.
In 2005, a technique using neural networks for HSE from a reduced number of meters was proposed by [
12]. In this technique, neural networks are initially used to provide pseudo-measurement values based on available measurements. These values are improved using state estimation with redundant measurements. The performance was satisfactory for the simulations carried out; however, obtaining good results is tied to the location of the meters.
Arruda et al. [
13] advanced the use of ESs for harmonic distortion estimation, providing robustness and adaptability to the HSE process. However, this technique presents several parameters that need to be empirically adjusted. Thus, the selection and configuration of evolutionary parameters emerged as critical challenges for the effectiveness of this technique. A limitation of the presented methodology is that it only estimates the harmonic components of the network, assuming that the PQ meter data are synchronized and that the power flow for the entire electric power system (EPS) at the fundamental frequency is known.
Also in 2010, Arruda et al. [
14] presented a study of HSE based on Evolutionary Strategies, however, performing a three-phase analysis of the power system. The results were compared with those obtained using the traditional Monte Carlo technique. The robustness of the proposed method was hindered by the adjustment of numerous HSE parameters for algorithm convergence, as well as the need for meter synchronization and prior knowledge of power flow in all EPS bars and phases.
Sepulchro, Encarnação, and Brunoro introduced an algorithm in 2014 [
15] for estimating both harmonic distortion and power flow at the fundamental frequency, leveraging Evolutionary Strategies. This research extends the application of HSE by incorporating the estimation of fundamental power flow. However, it also encounters difficulties related to the fine-tuning of ES parameters.
In 2021, a hybrid algorithm for HSE in a transmission EPS from a reduced number of meters was proposed by [
16]. A strategy called “HA” was used, which is a combination of ES algorithms with SADE. SADE is a type of modified Differential Evolution algorithm. The goal is to combine the high convergence speed of ES with the excellent accuracy of SADE. The technique was applied to the IEEE 14-bus and IEEE 57-bus systems, and the results obtained are satisfactory; however, the technique encountered a number of parameters involved in the combination of the two algorithms.
The introduction of the Jaya algorithm for solving multi-objective optimal power flow by Warid et al. in 2018 [
17] brought a new perspective on the use of optimization algorithms with few parameters in various problems. This work highlighted the efficiency and simplicity of the Jaya algorithm as valuable features to tackle optimization problems in power systems, such as HSE. The simplicity of the code, underscored by its few tuning parameters, makes the Jaya algorithm a promising tool for HSE, particularly in larger electrical systems where complexity renders established methods like Evolutionary Strategies impractical.
In 2024, a technique for optimal power flow analysis to minimize power losses was proposed by [
18]. This technique is based on two optimization methods, the Jaya algorithm, and the Teacher Learning Based Optimization (TLBO) algorithm. The absence of parameters in both algorithms makes the proposed technique less complex. The technique was applied to the IEEE 39-bus system. Also in 2024, Sepulchro and Encarnação extended the application of the Jaya algorithm to HSE [
19]. In this paper, preliminary results using the Jaya algorithm were presented for harmonic state and power flow estimation for the IEEE 14-bus system. The main objective of this work was just to validate the Jaya algorithm on a small-scale system.
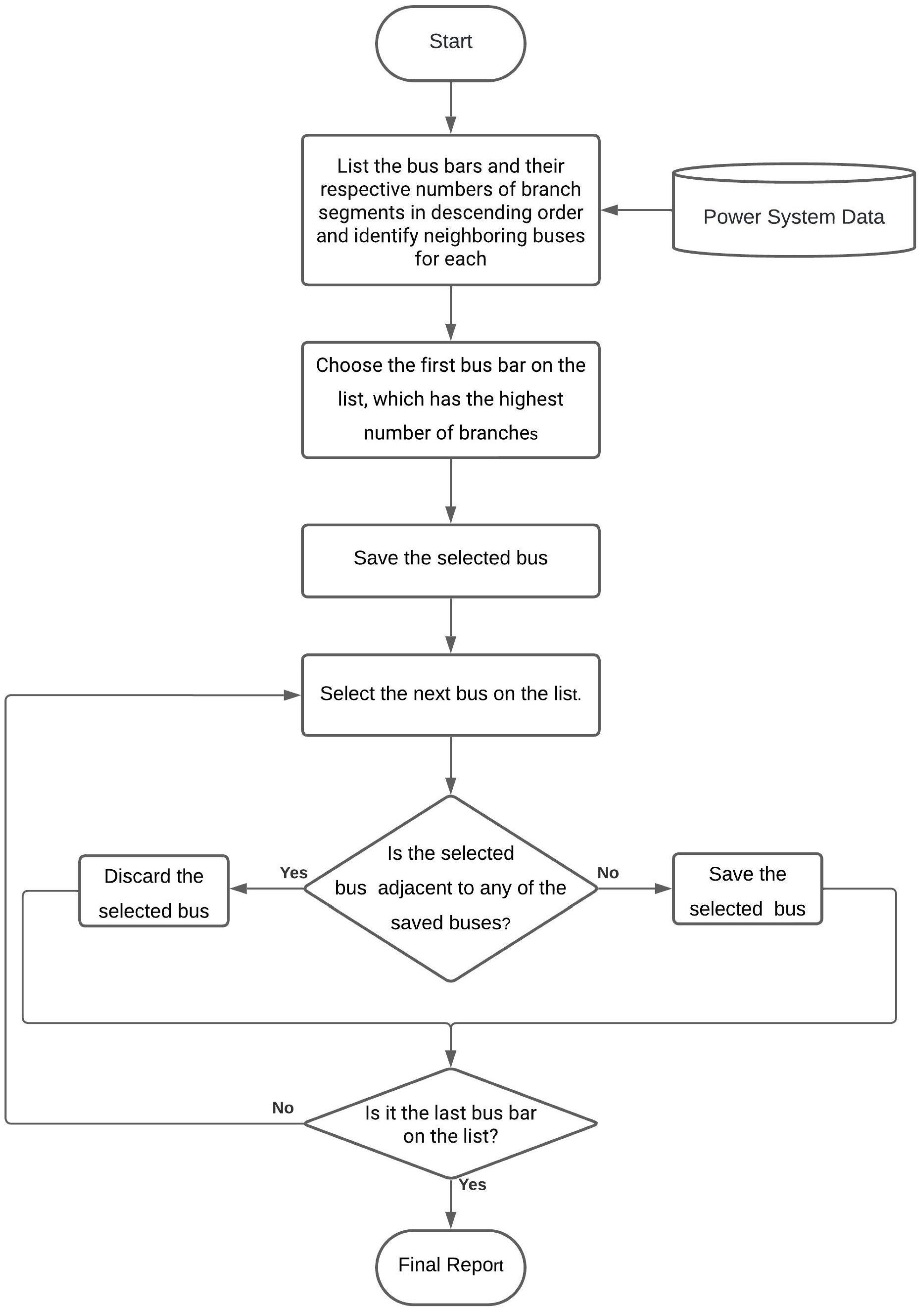
In this sense, as a continuation of the previous work, the authors expand the application of Jaya algorithm for harmonic state and power flow estimation for larger systems. The methodology specifically targets IEEE 14-bus and IEEE 30-bus systems, aiming to demonstrate the effectiveness and efficiency of the Jaya algorithm in resolving harmonic estimation challenges. Results are compared with those obtained using ESs, chosen as a benchmark due to their proven effectiveness in HSE, supported by empirically fine-tuned numerous parameters, contrasting with the fewer parameters of the Jaya methodology. This comparison will assess the algorithms’ efficacy in terms of accuracy and processing time. Furthermore, the authors also present a strategic approach for the allocation of PQ meters in power systems, based on the number of branches at each bus and their proximity, aiming to cover the fewest possible buses while maintaining system observability for power flow estimation and HSE.
2. Evolutionary Strategies
Evolutionary Strategies (ESs) are an optimization technique inspired by evolutionary principles, originally developed by Ingo Rechenberg and Hans-Paul Schwefel in the 1960s and 1970s [
20,
21,
22,
23], with subsequent refinements and developments proposed in later works [
24]. These strategies were initially conceived as a way to mimic natural evolution processes in the context of solving complex engineering problems. In ESs, a population of potential solutions, represented by individuals, undergoes iterative improvement through genetic mutations and recombination. Mutations introduce variations in individual solutions by altering their parameters, while recombination allows the exchange of information between individuals to generate potentially better solutions. The fitness of each individual is evaluated based on its proximity to the optimal solution, driving the selection of individuals for the next generation. This iterative cycle continues until a predefined stopping criterion is met, such as achieving an acceptable level of solution quality or completing a maximum number of generations.
At the end of each generation, a selection process takes place where the fittest individuals—those closest to the optimal solution—are chosen to form the next generation. This cycle of mutation, recombination, and selection continues until a stopping criterion is met, which could be a predefined number of generations or the attainment of an acceptable solution.
Briefly, an evolutionary algorithm can be described as follows [
25]:
- 1:
- 2:
initialize
- 3:
evaluate
- 4:
while (stopping criterion) do
- 5:
variation
- 6:
evaluate
- 7:
- 8:
selection
- 9:
- 10:
end while
In this context,
represents a population with
individuals.
denotes a set of
individuals generated through recombination and mutation from
.
is a function of
and can be zero or equal to
. During the evaluation phase, each individual is scored based on its distance from the optimal solution. The best-performing individuals are then selected to form the initial population for the next generation. This iterative process continues until the stopping criterion is satisfied. The basic flowchart of the ES algorithm is shown in
Figure 1.
4. Problem Formulation
4.1. General Scheme
Firstly, the harmonic orders of interest are defined, and the admittance matrices for the fundamental frequency and harmonic frequencies are calculated from the power system data. Considering that the methodology proposed in this work aims to estimate power flow and HSE by assessing harmonic voltage distortion levels at buses without direct measurements, it is assumed that measurements are available only at select buses in the power system. These measured values serve as a database for estimating fundamental and harmonic frequency values at buses without direct measurements. The analysis and estimation of data for the fundamental frequency and each harmonic order will be conducted separately, employing either the Jaya algorithm or Evolutionary Strategies. Finally, by comparing the measured and estimated voltage values for the fundamental frequency and harmonic orders, the Total Harmonic Distortion (THD) can be determined. The proposed methodology is illustrated by the block diagram shown in
Figure 3.
4.2. Reference Values
PQ meters installed at selected buses of the system deliver synchronized reference data for current and voltage, including magnitude and phase values, across the harmonic orders of interest as well as the fundamental frequency.
4.3. Harmonic Orders of Interest
The determination of which harmonic orders to examine is influenced by the availability of PQ meters and the specific objectives of the research. In this particular study, the emphasis is placed on identifying and analyzing the most frequently encountered harmonics in power systems. This includes the odd harmonic orders 3, 5, 7, 9, 11, and 13, which are often most significant in terms of their impact on system performance and equipment [
30], enabling the calculation, from the values at the fundamental frequency, of the THD given by
where THD represents the Total Harmonic Distortion,
signifies the magnitude of the
harmonic component,
denotes the magnitude of the fundamental component, and
n represents the last harmonic component considered in the summation.
4.4. Individual Representation
In the HSE study, each individual represents a potential solution, embodying a possible state of the system. To address the study’s objectives effectively, it is essential to identify a distinct individual for each specific harmonic order h. This individual is responsible for representing the optimal solution for the system at that particular harmonic order. In this context, for a system consisting of t buses and m meters, and using the Jaya algorithm for optimization, each individual is represented by a matrix of rows and two columns.
Taking the IEEE 14-bus system as an example, the representation of an individual for Jaya is defined according to the expression in Equation (
3). In this specific case, monitoring is limited to buses 2, 3, 8, 9, 12, and 14. The matrix columns, first and second, represent the magnitudes and phases of the voltages at each bus for the harmonic order
h under analysis, respectively.
where
denotes the absolute voltage at bus
i in harmonic order
h;
indicates the phase of voltage at bus
i in harmonic order
h.
However, within the context of the ES methodology, an additional column is appended for each variable, considering that it is imperative to account for mutation steps aligned with the magnitudes and phases of voltages, thus necessitating the addition of two columns in this instance. As an illustrative example, the representation of an individual for the IEEE 14-bus network is defined as shown in (
4), where measurements are taken exclusively at buses 1, 4, 6, 8, 10, and 14. The first and third columns represent the magnitudes and phases of voltage at each bus and harmonic order
h, while the second and fourth columns denote the mutation steps.
where
denotes the absolute voltage at bus
i in harmonic order
h;
indicates the phase of voltage at bus
i in harmonic order
h;
represents the mutation step for the voltage parameter at bus
i in harmonic order
h (not applicable to the Jaya algorithm); and
signifies the mutation step for the phase parameter at bus
i in harmonic order
h (not applicable to the Jaya algorithm).
4.5. State Estimation for Each Harmonic of Interest
In the HSE process, following the selection of harmonic orders considered relevant for this study and the definition of individual representation, each is subjected to the state estimation algorithm proposed in this work, which is based on the Jaya algorithm or ES algorithm. The input data for the algorithm not only include the selected harmonic orders but also actual measurements of voltages and currents, coupled with the system’s admittance matrix. The execution of the algorithm for each harmonic of interest is meticulously carried out, and the results are compiled into a final report.
4.6. Evaluation
The evaluation process is designed to determine the fitness of each individual by quantifying how closely each solution approximates the established reference values. In this context, each individual is considered a potential solution to the HSE problem. Thus, for each harmonic order
h selected for analysis, the voltage vector corresponding to each individual, combined with the system’s admittance matrix, results in the formulation of an estimated current vector
, as illustrated by
where
is the voltage at bus
j, harmonic order
h,
is the element
of the admittance matrix at the frequency for harmonic order
h, and
is the number of monitored buses.
The accuracy of these estimates is verified by calculating the difference between the estimated current vector and the measured current vector
, a process that generates the error vector
, as shown by
where
is the estimation error at bus
i, harmonic order
h,
is the calculated current at bus
i from an individual who represents the voltages at the buses for selected harmonic orders, and
is the measured current, harmonic order
h at bus
i. This error vector quantitatively represents the discrepancy between the estimated condition and the actual system condition, providing a crucial metric for performance evaluation. After calculating the errors for all monitored buses, the fitness of each individual analyzed for the specified harmonic order is calculated as the inverse of the sum of the squares of the error vector elements, as defined by
where
is the individual fitness at harmonic order
h.
4.7. Selection
In the case of the ES methodology, the selection is deterministic, ensuring that only the fittest individuals, i.e., those with the highest fitness, are chosen while maintaining a constant population size from generation to generation. Selection includes both parents and offspring to allow for elitism, ensuring that the best parent individuals are preserved throughout generations.
On the other hand, the Jaya algorithm methodology employs a unique selection methodology within its iterative process, as detailed in
Figure 2. Originating from an initial population generated randomly within the search space, each individual in the population automatically generates a successor using the Equation (
1). This successor then undergoes a fitness evaluation, where its fitness is compared to that of its progenitor. If the successor’s fitness surpasses that of its originator, it replaces the latter in the population; otherwise, it is discarded, thus optimizing the process by focusing resources on more promising candidates.
Furthermore, the Jaya algorithm identifies the best and worst individuals within the population throughout all iterations. The best individuals are those who consistently demonstrate the highest levels of fitness, effectively guiding the search toward more optimal solutions. On the other hand, the worst individuals represent the lowest levels of fitness, serving as benchmarks for the necessary improvements and adjustments in the algorithm’s search dynamics. Once the stopping criterion is met, the best solution for each harmonic order is considered the final solution for that specific harmonic order.
6. Results and Discussion
Considering the premises previously presented, the proposed methodology was applied to the IEEE 14-bus and IEEE 30-bus systems using the proposed Jaya algorithm as well as the ES algorithm for a comparative study between the two methodologies.
Thus, the analysis involved the introduction of harmonic currents of order 3, 5, 7, 9, 11, and 13 in some buses, causing harmonic distortion in the system. This scenario presents a challenge for the system operator to identify these sources, considering a hypothetical situation where the operator is unaware of these sources and does not have PQ meters throughout the system.
As discussed, the ES algorithm required empirical tuning of various input parameters, which became a daunting task as the parameters are sensitive to each other. This necessitated running the codes multiple times to find suitable parameter tuning, a situation that is exacerbated when dealing with different problems, requiring specific parameters tuned for each analysis situation. This tuning is performed to allow both the diversity of the initial population of possible solutions and the rapid convergence to a global optimum. Conversely, the Jaya algorithm does not allow parameter adjustment freedom, containing only two parameters, namely the initial population size and the maximum number of generations, making it very simple and easy to tune.
With the initial parameters defined, based on voltage measurements at some selected buses, the algorithm receives system data, only the measured values at these buses and the initial parameters, and estimates the voltage amplitudes and phases at unmonitored buses for the fundamental frequency and the harmonic orders of interest.
To demonstrate that the voltage estimation errors are consistently kept within a minimal value range for each harmonic order, the proposed HSE methodology was executed 30 times, first applying the ES algorithm and then the Jaya algorithm, obtaining the results for each fundamental and harmonic order of interest at unmonitored buses. This allows us to obtain the THD and compare the time and consequently the processing cost for both algorithms. The results are presented and discussed below.
Considering that the amplitudes of the harmonic orders can be reasonably small and that any slight difference would result in considerable relative errors, the approach was to address the absolute errors between the estimated and real values, which allows for better analysis of the results. The average absolute errors of the obtained voltage magnitudes are presented in
Table 5 and
Table 6 using the ES and Jaya methodologies, respectively, for the IEEE 14-bus system, and in
Table 7 and
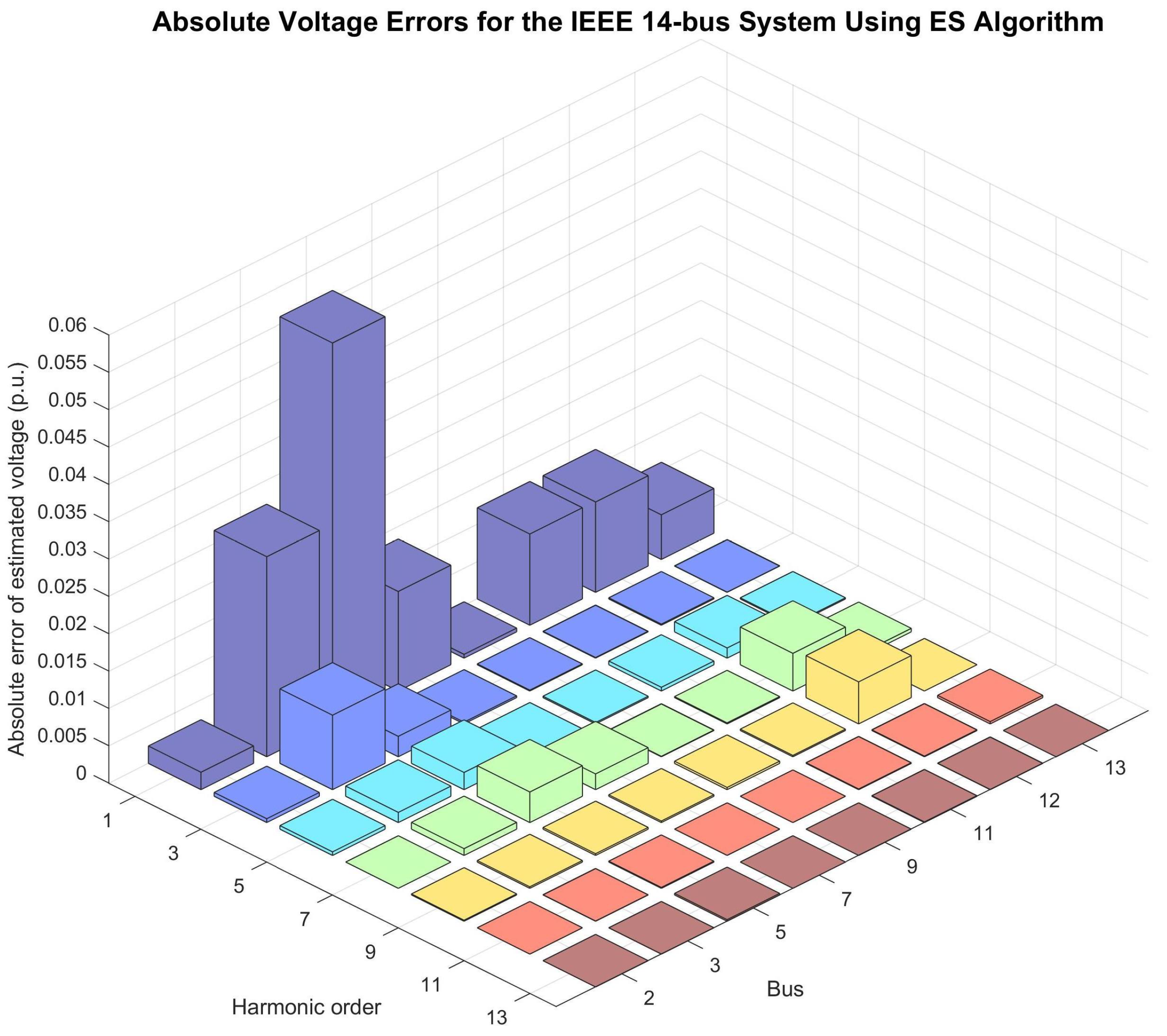
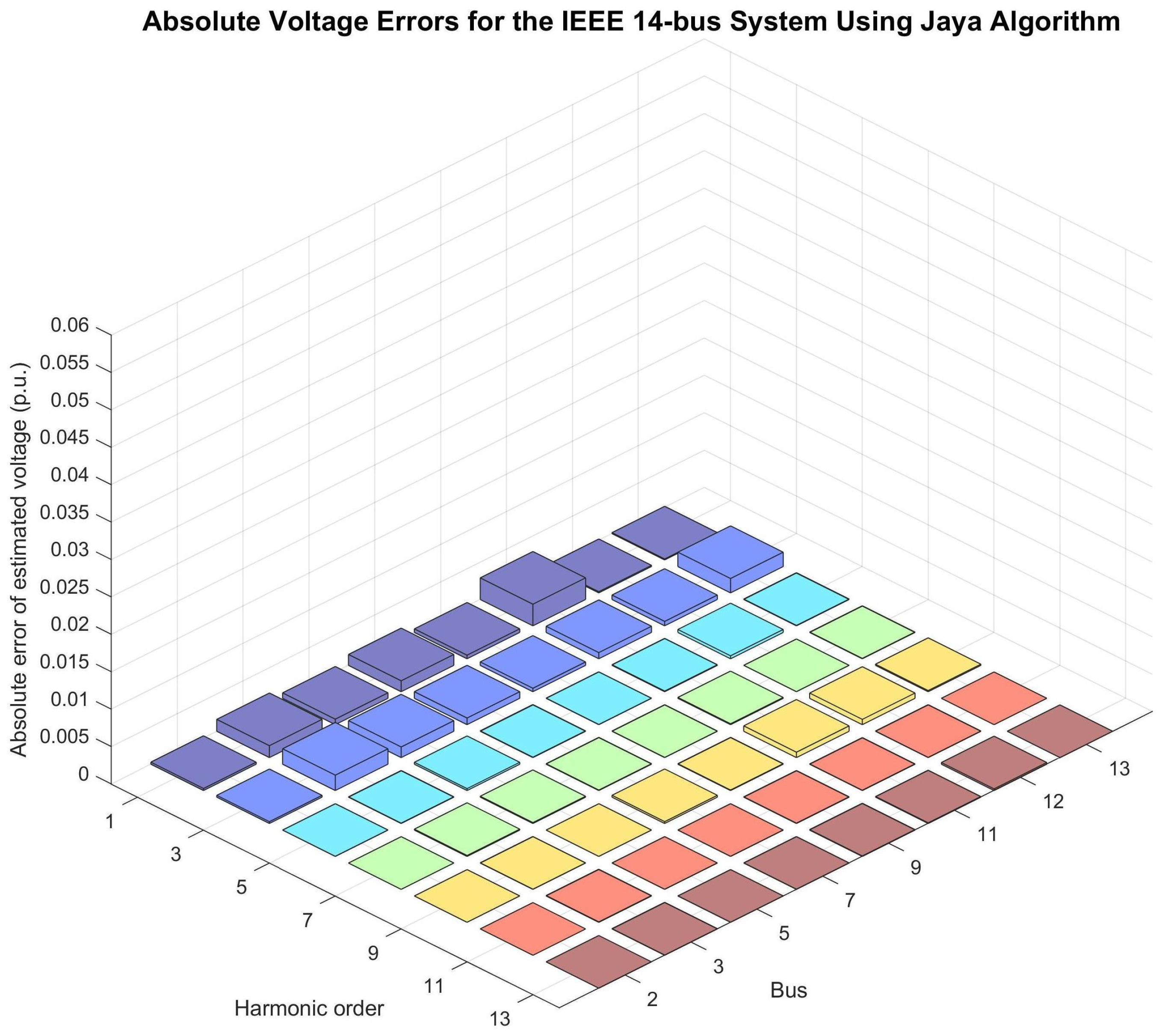
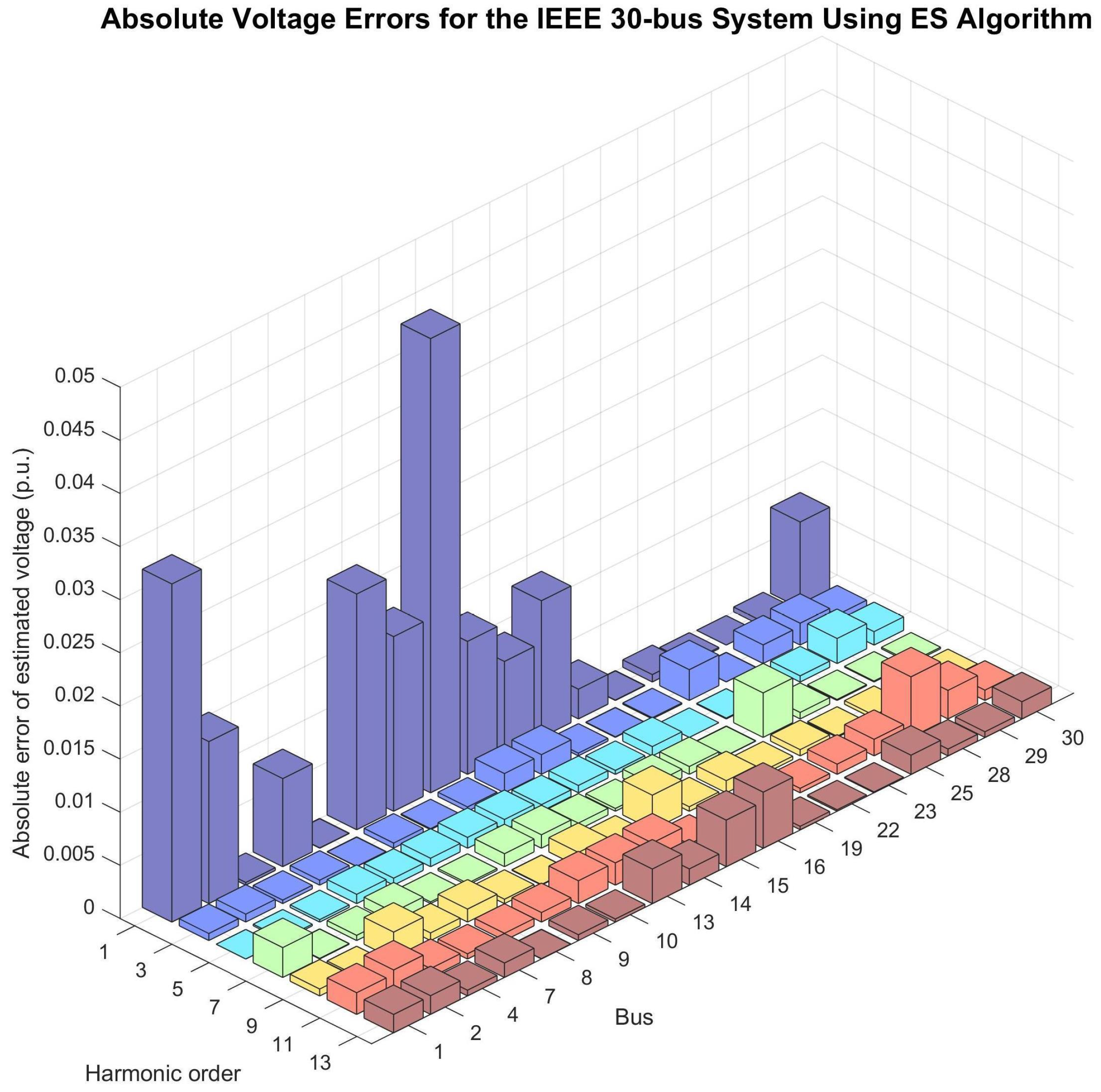
Table 8 using the ES and Jaya methodologies, respectively, for the IEEE 30-bus system. The same results are presented graphically in
Figure 7 and
Figure 8 for the IEEE 14-bus system and in
Figure 9 and
Figure 10 for the IEEE 30-bus system. Considering the estimates for the fundamental frequency, it is observed that the highest errors obtained using ES were 0.051 p.u. and 0.043 p.u. for the IEEE 14-bus and IEEE 30-bus systems, respectively, higher than the errors obtained with the Jaya algorithm, which were 0.003 p.u. and 0.011 p.u. for the two systems, respectively, demonstrating the efficiency of the Jaya algorithm for power flow estimation. For the harmonic components, considering the IEEE 14-bus system, the highest errors obtained are 0.010 p.u. using ES and 0.002 p.u. using Jaya, both in the third harmonic. In the case of the IEEE 30-bus system, the highest errors are 0.006 p.u. using ES and 0.007 p.u. using Jaya, both in the eleventh harmonic, which may be an insignificant difference with little impact on the THD estimation, as it is a higher-order harmonic whose magnitudes, in this case, are smaller than those of lower-order harmonics. Thus, the errors obtained with the Jaya algorithm, which are comparable or lower to those obtained with the ES algorithm for the harmonic components, demonstrate the effectiveness of the HSE using the proposed methodology based on the Jaya algorithm.
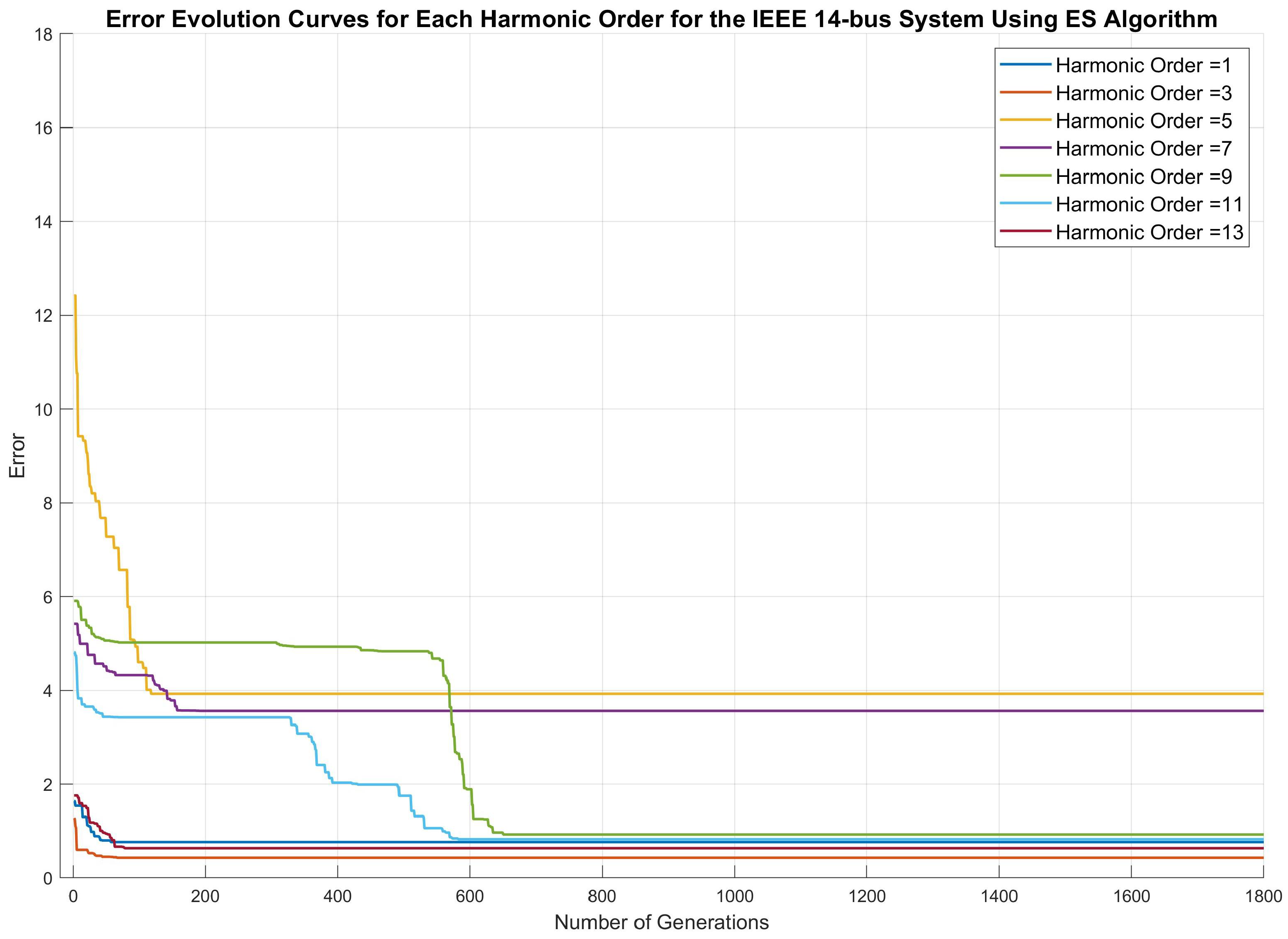
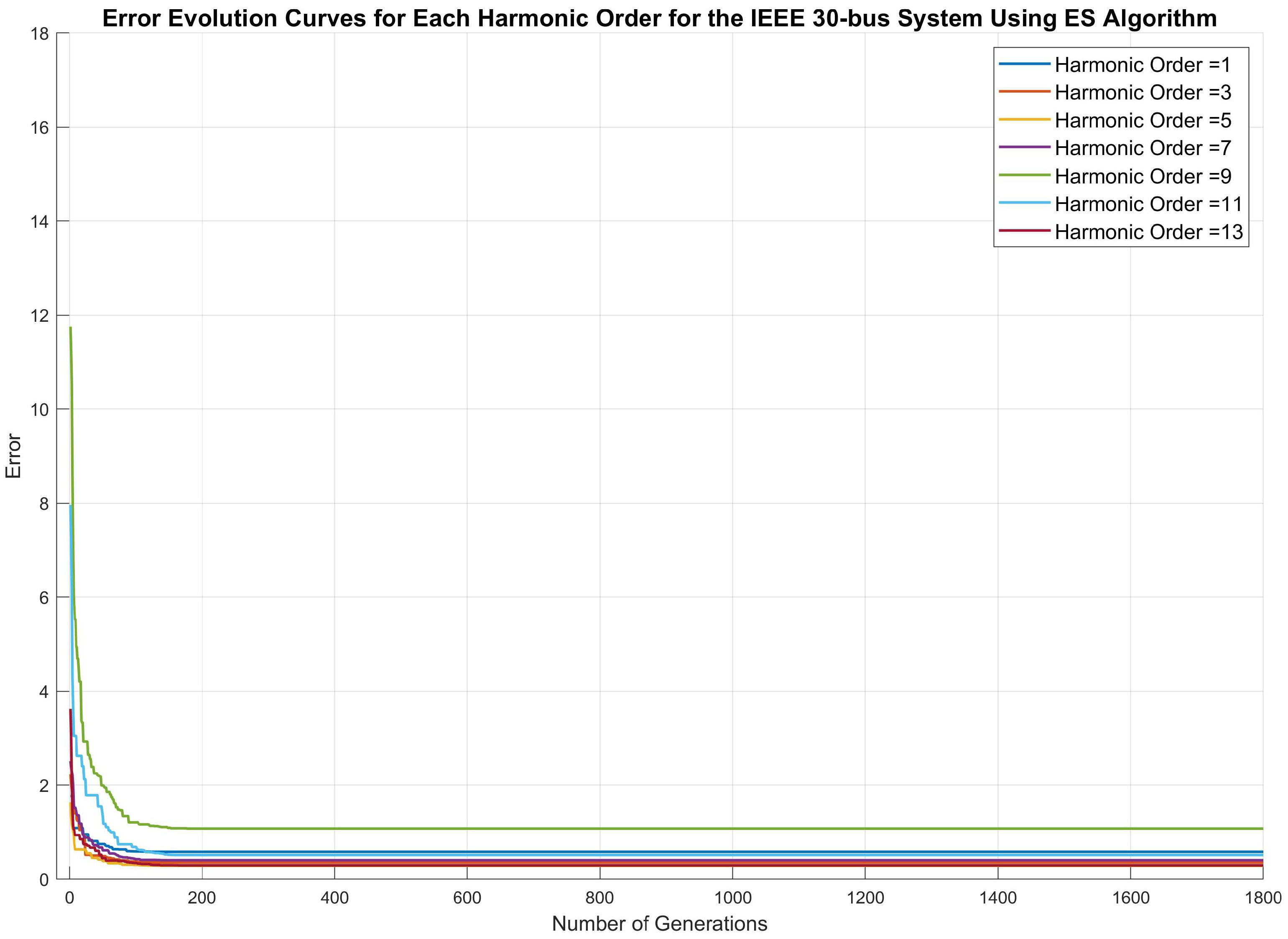
Considering the intrinsic characteristic of an evolutionary optimization algorithm like ES, which is based on selecting the fittest individuals to compose the initial population of the next generation, and an algorithm with few parameters like Jaya, which is directed by the best individual of each generation, the success in HSE is verified by the convergence of individuals or possible solutions to the optimal solution, that is, to the solution with the highest fitness and consequently the lowest error. In the present study, the lower error implies estimating the fundamental and harmonic components closer to the real values. To illustrate the error evolution curves’ behavior throughout the iterative process,
Figure 11 and
Figure 12 show the error evolution curves for the IEEE 14-bus network using, respectively, the ES and Jaya methodologies, and
Figure 13 and
Figure 14 show the error evolution curves for the IEEE 30-bus network using, respectively, the ES and Jaya methodologies. It is noted that the curves are raised for each harmonic order, considering that the algorithm is applied to each harmonic order at a time. The analysis of these curves allows us to conclude that they all move towards the lowest error plateau, stabilizing at certain values, proving the convergence of both methodologies. For harmonic frequencies, errors ranging from 0.000 to 0.061 p.u. for the IEEE 14-bus system and from 0.000 to 0.081 p.u. for the IEEE 30-bus system are observed. Some of the most significant error values are related to higher- and lower-order harmonics, whose impact on the total THD calculation is practically negligible. These errors for harmonic frequencies demonstrate that the algorithm is also effective in HSE.
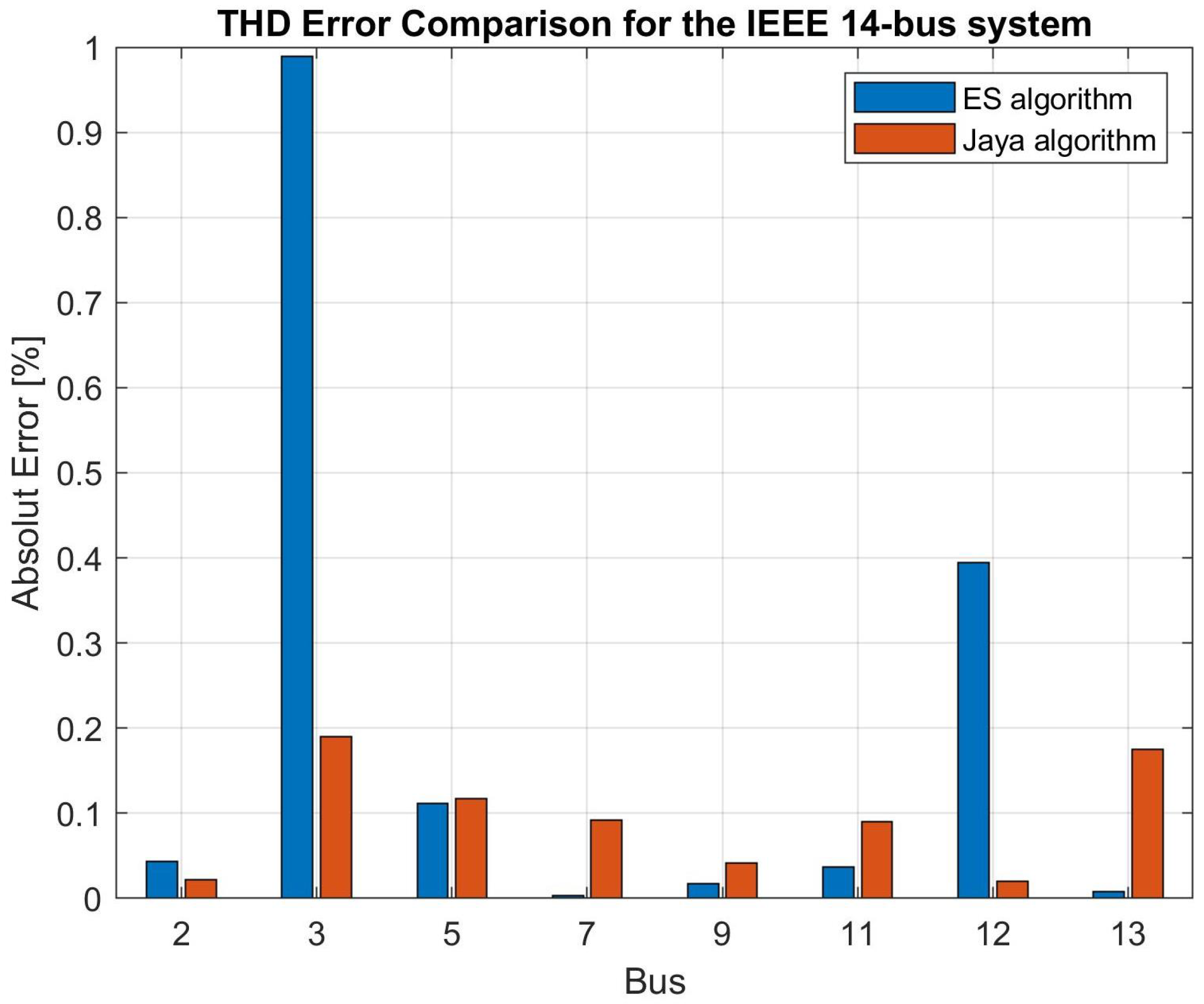
From the estimated voltage values for the fundamental frequency and harmonic orders at the unmonitored buses, the THD values at these buses are determined using Equation (
2). These values are listed in
Table 9 and
Table 10 using the ES and Jaya methodologies, respectively, for the IEEE 14-bus system, and in
Table 11 and
Table 12 using the ES and Jaya methodologies, respectively, for the IEEE 30-bus system. The obtained THD error values for both methodologies are also illustrated in
Figure 15 and
Figure 16. It is observed that the THD errors for the IEEE 14-bus system are slightly higher for the ES algorithm, with a maximum error of 0.990% compared to 0.190% for the Jaya algorithm. However, for the IEEE 30-bus system, the Jaya algorithm resulted in a maximum error of 0.609%, which is slightly higher than the maximum error of 0.446% obtained with the ES algorithm, although the average error values are within the same range. Finally, the comparative analysis of these THD results allows for the conclusion that the Jaya algorithm is as effective as the ES algorithm by presenting average and maximum THD errors that are comparable to or better than those resulting from the ES algorithm. These errors are irrelevant for HSE, considering that the obtained results allow a comprehensive analysis of the systems for identifying the buses with the highest and lowest THD and consequently allowing the location of harmonic sources.
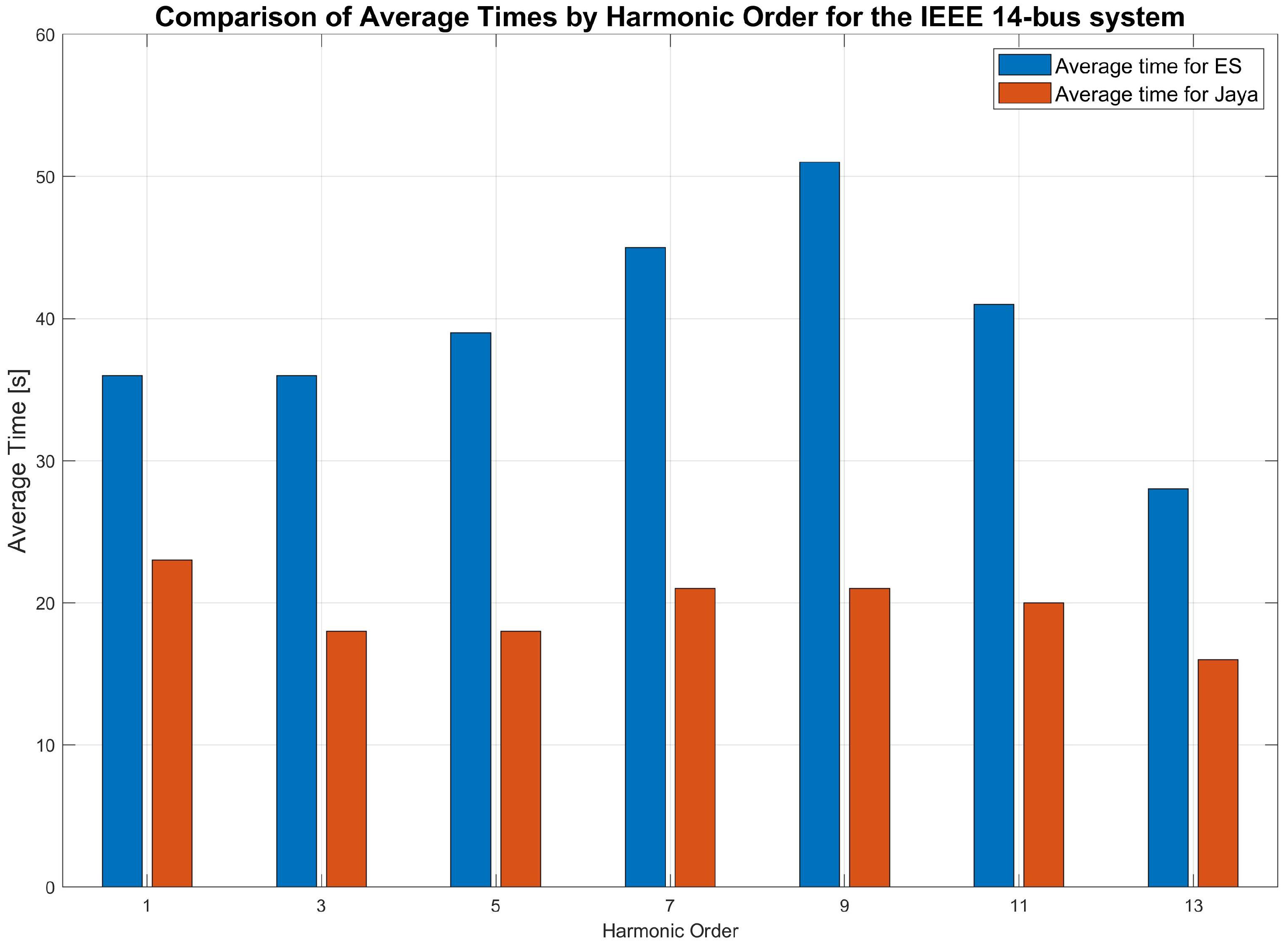
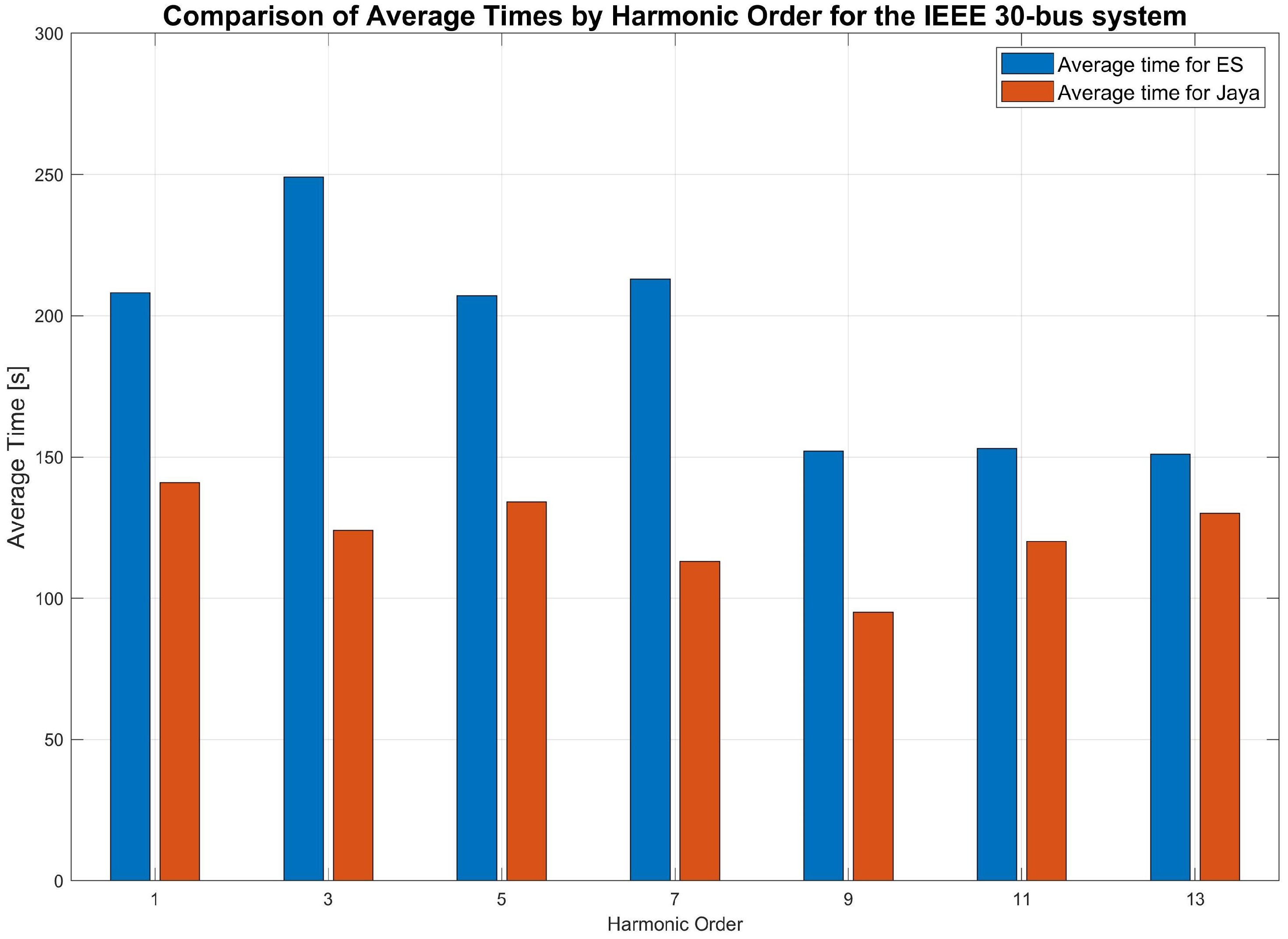
Finally, considering the main characteristic of the Jaya algorithm compared to other methodologies existing in the literature, such as the ES algorithm, which has a simpler code structure and a minimal number of parameters, it is worth addressing the average processing times recorded for both methodologies when applied to the IEEE 14-bus system, shown in
Figure 17, as well as when applied to the IEEE 30-bus system, presented in
Figure 18. It is observed that in both systems and for all harmonic orders, the Jaya algorithm exhibited considerably lower processing times, finding results of practically the same quality as the ES algorithm in up to 50% less time. This proves that the simplicity of the code and the minimal number of parameters enable a quick solution using the Jaya algorithm.
Figure 19 shows the total average time to execute the proposed methodology in this work during the 30 simulations performed. This methodology, which estimates the power flow at the fundamental frequency and all harmonic orders of interest, is applied to both the IEEE 14-bus and IEEE 30-bus systems using the ES and Jaya algorithms, as illustrated in
Figure 3. It is observed that with the Jaya algorithm and considering the IEEE 14-bus system, the proposed methodology takes about half the time to obtain the results compared to the ES algorithm. For the IEEE 30-bus system, the Jaya algorithm achieves the desired results in approximately 64% of the total time required by the ES algorithm. Even though the convergence of Jaya may be slower than the ES algorithm, meaning it may take a larger number of generations to converge, Jaya has a lower processing time, which can be attributed to its simplicity and fewer parameters. Thus, corroborating the objective proposed in this work, the Jaya algorithm is significantly faster in achieving equally satisfactory results as the ES algorithm, resulting in lower processing costs as a significant advantage.
7. Conclusions
The application of the proposed power flow and HSE methodology based on the Jaya algorithm to the IEEE 14-bus and IEEE 30-bus systems, especially at buses not equipped with PQ meters, using the measured values from other buses, resulted in estimated voltage values with minimal error or little impact on the THD calculation. This led to the determination of more realistic THD values, demonstrating the effectiveness of the proposed methodology based on the Jaya algorithm compared to the results obtained with the ES algorithm.
The adopted strategy for determining the minimum number of meters and selecting the buses to receive these meters proved to be accurate, as the results achieved with both the Jaya and ES algorithms demonstrated the effectiveness of the proposed methodology in estimating the fundamental and harmonic voltages at the other buses from the indicated buses, with minimal absolute errors.
In general, the implementation of the power flow and HSE methodology, based on the Jaya algorithm, proved to be effective in achieving satisfactory results in less time and with lower processing costs compared to those obtained with the ES algorithm. The dynamics of the Jaya algorithm, which aims to move candidate solutions away from the worst solutions and closer to promising solutions, demonstrated robustness in achieving convergence to solutions near to the reference values, allowing for a more precise calculation of THD at the unmonitored buses.
Even though it presented slower convergence compared to the ES algorithm, the absence of parameters and the simplicity of the Jaya algorithm provided a quicker response in the iterative optimization process, without the need for costly empirical parameter adjustments or a suitable set of parameters for each scenario or power system under study, making the proposed methodology applicable to various scenarios with minimal changes in the number of individuals in the initial population and the maximum number of generations.
Based on the obtained results, the presented methodology based on the Jaya algorithm emerges as a promising strategy of HSE, using a minimum number of meters allocated at specific buses through the outlined strategy in this study. This opens avenues for its application in larger, real-world systems, likely yielding equally satisfactory outcomes, through an algorithm that requires few tuning parameters. Such implementation could result in cost savings in studying and identifying harmonic sources in power systems, by reducing the required quantity of PQ meters.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}