
Vertical Switching Algorithm for Unmanned Aerial Vehicle in Power Grid Heterogeneous Communication Networks


Abstract
1. Introduction
1.1. Related Works
1.2. Contributions
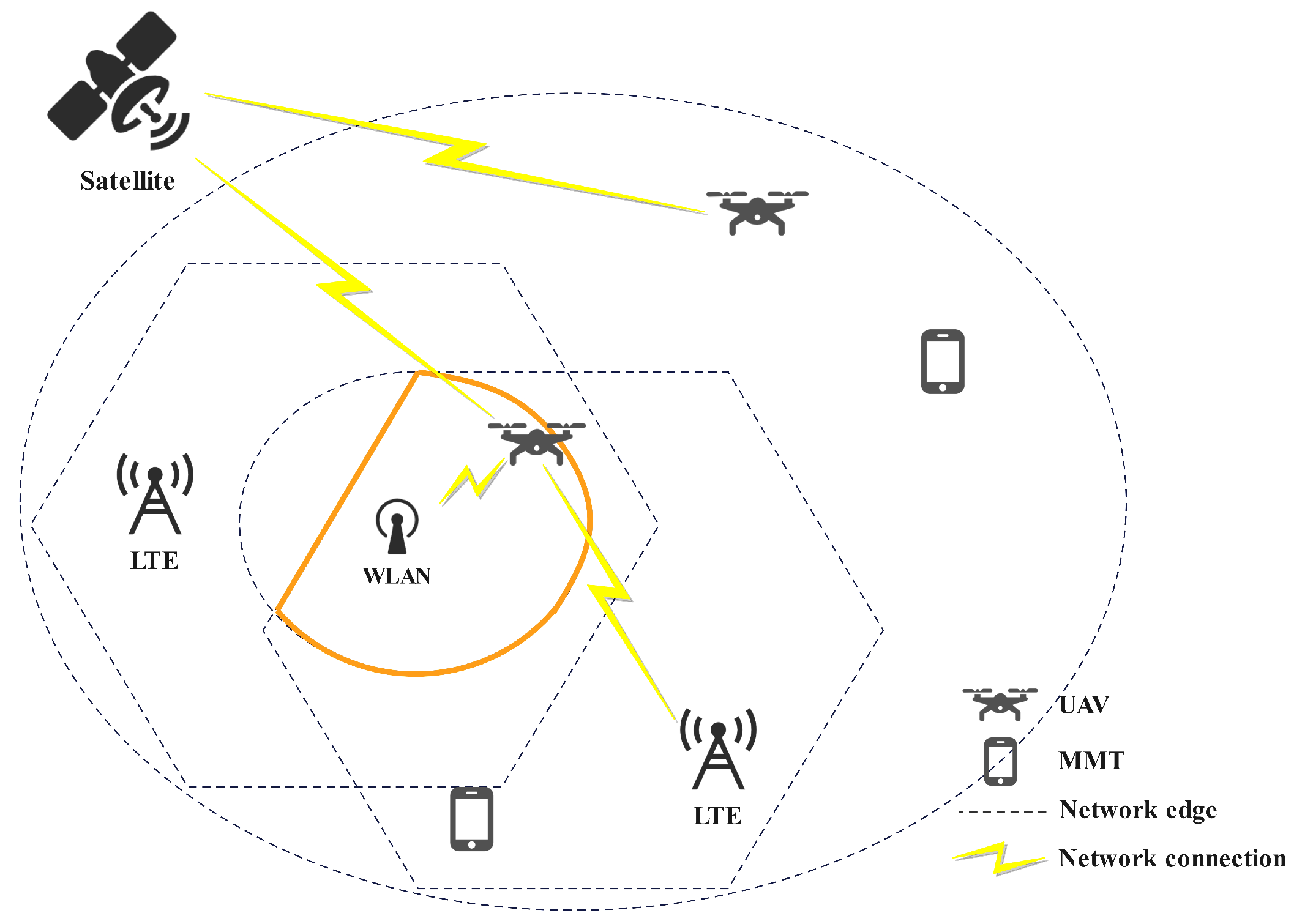
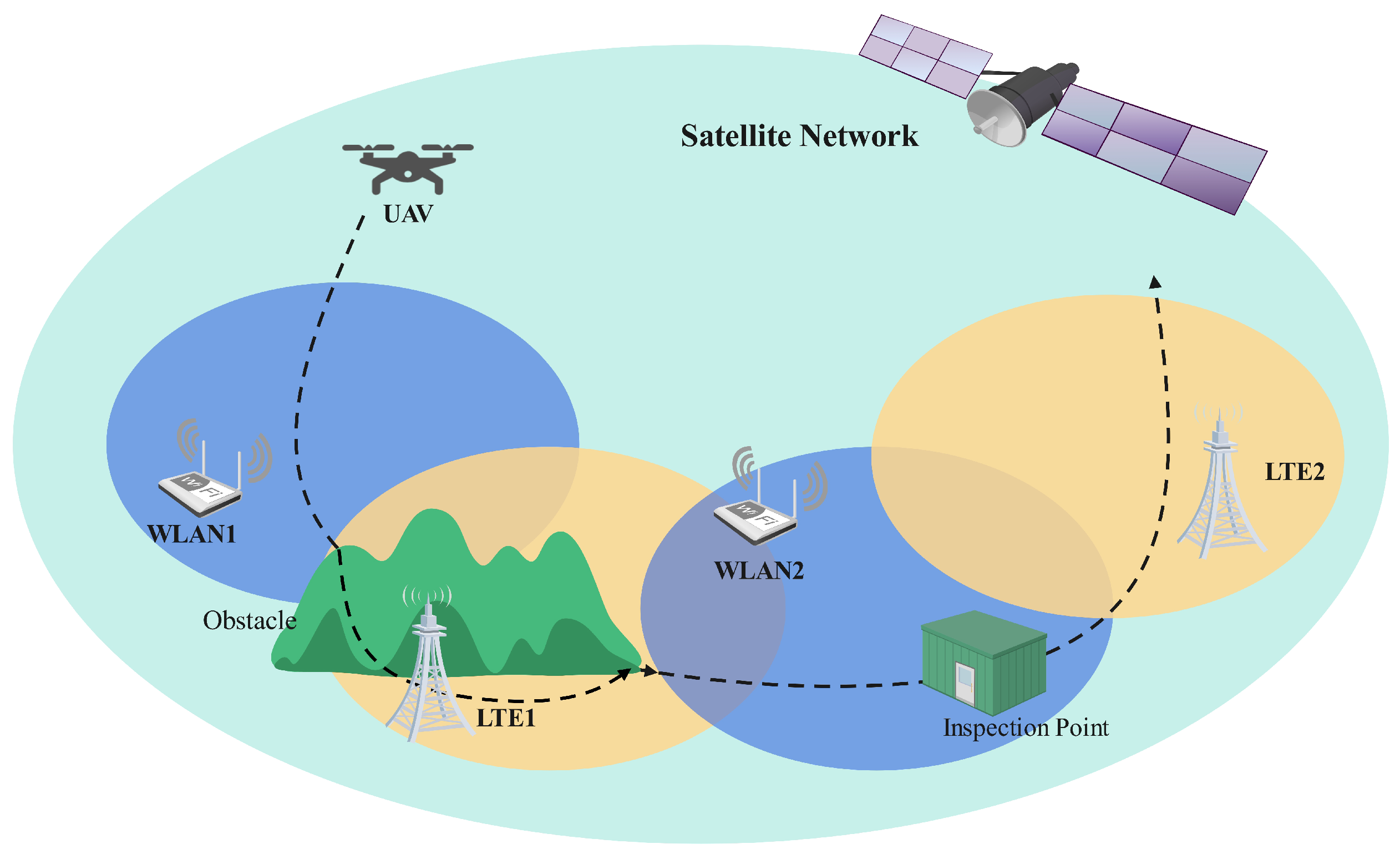
- We consider a scenario involving power grid inspection using a UAV, where there is heterogeneous wireless network coverage, including long-term evolution (LTE), wireless local area network (WLAN), and satellite wireless networks. During the inspection, the UAV needs to navigate around obstacles and dynamically select the most suitable network based on their location to ensure communication quality. We develop a joint design for UAV trajectory planning, network selection, and vertical switches, which comprehensively considers seven network attributes such as signal strength, bandwidth, delay, jitter, loss rate, network load, and cost. Taking into account the service requirements and user preferences in the inspection scenario and the requirements for network performance for three different types of services (voice, video, and web browsing), we enable the power grid UAV to dynamically select and switch networks in real-time, ensuring communication service quality throughout the inspection process.
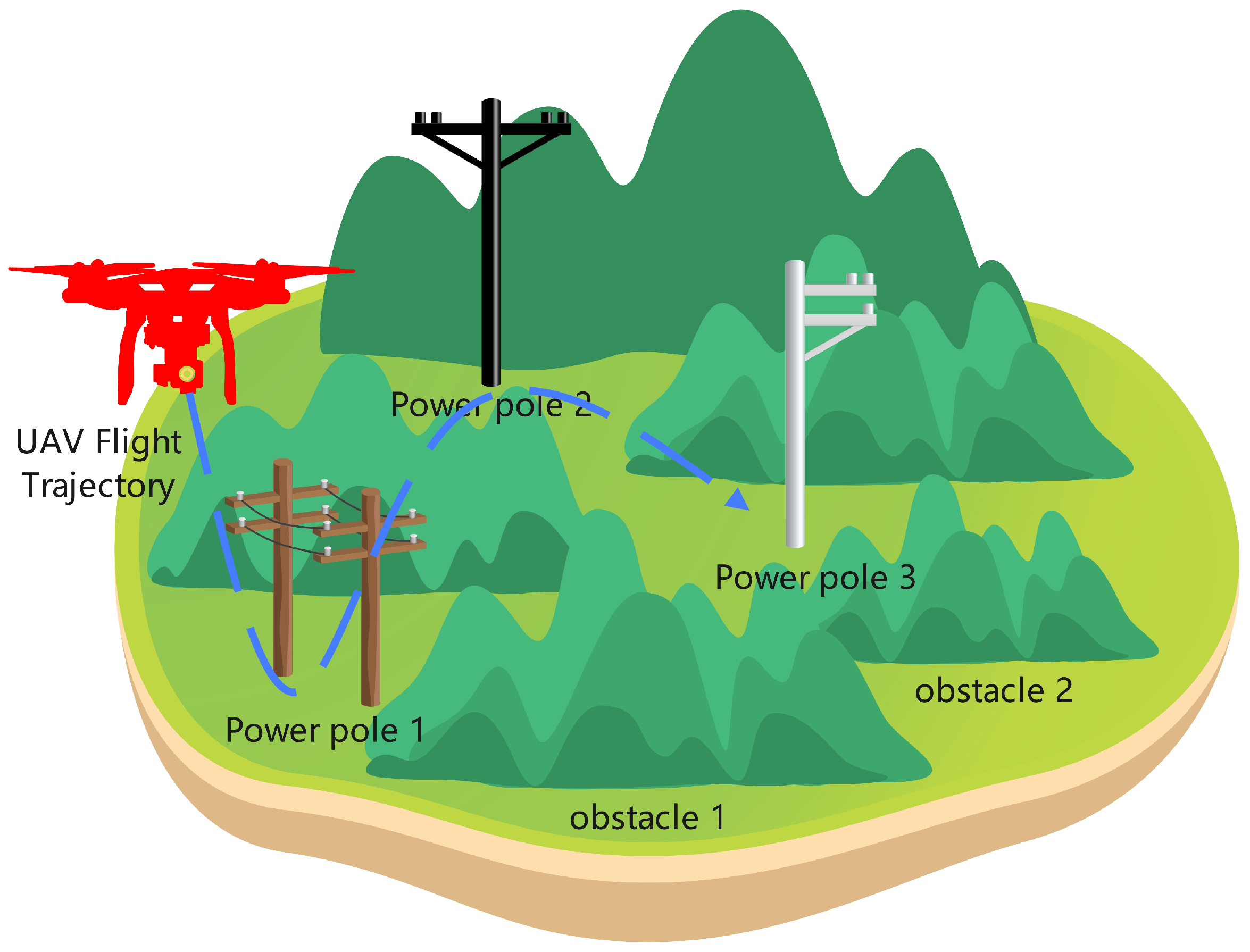
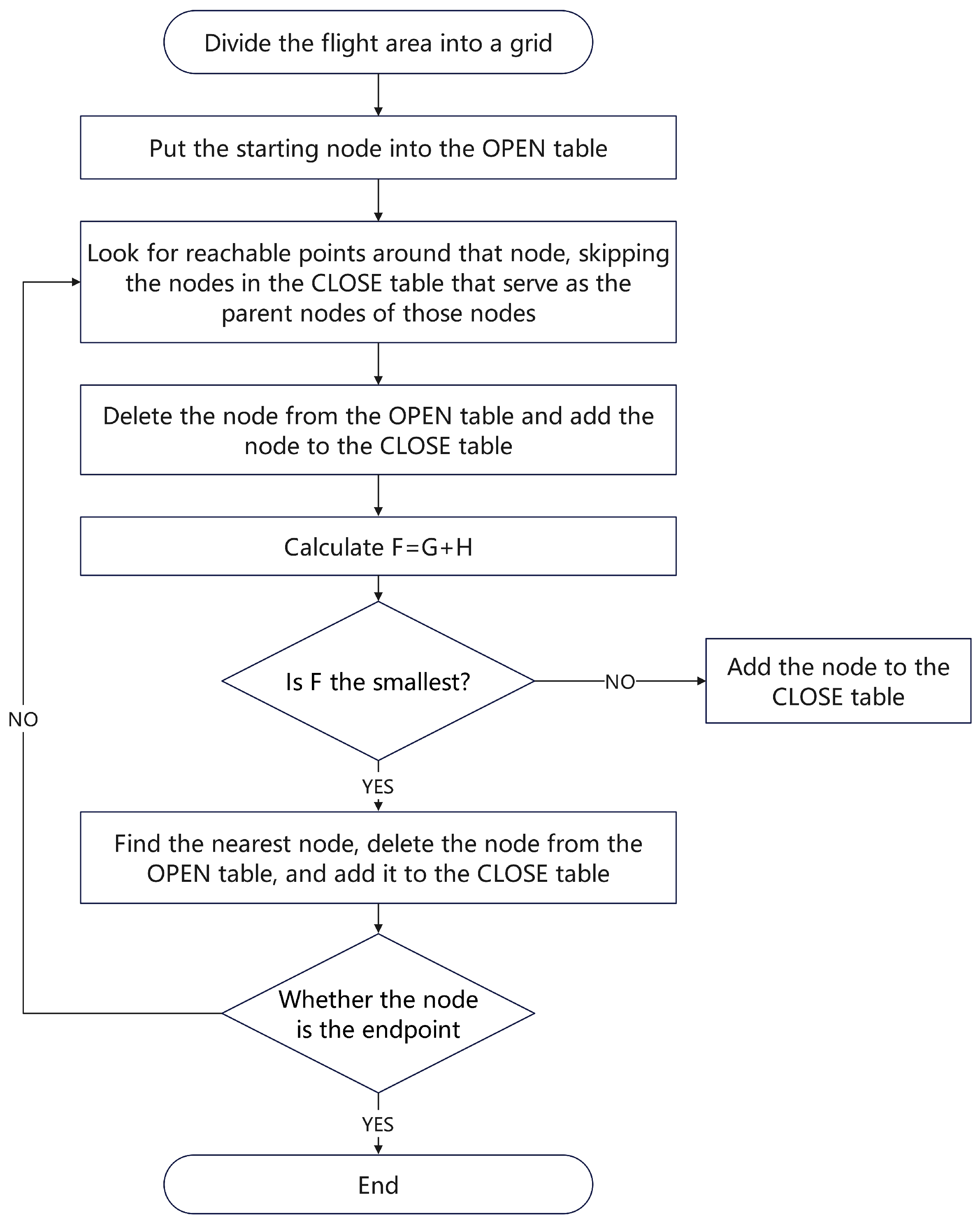
- We use the A-star algorithm to plan the flight trajectory of the UAV so that the UAV can avoid obstacles during the flight and find the shortest trajectory to the inspection points. The algorithm plans the feasible area of the UAV flight through the known obstacles and the terminal position information and finds the relative distance between the landing point and the end point of each flight so that the UAV is closest to the endpoint while avoiding the obstacle in each flight. The algorithm can realize the shortest trajectory of the global flight of the UAV, effectively saving flight power consumption and task execution time, enabling the UAV to avoid obstacles and effectively reach each power grid inspection point.
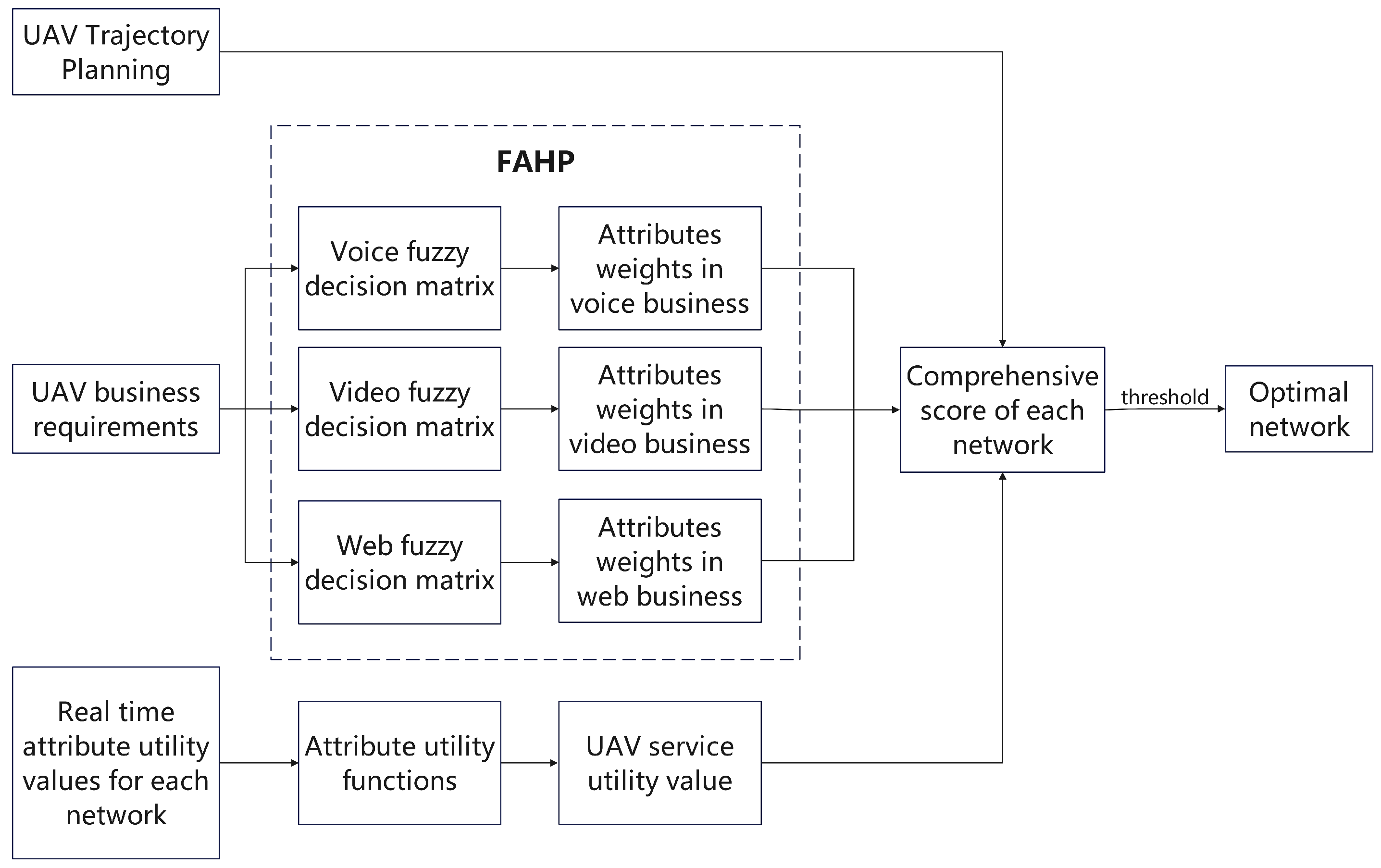
- We propose a network selection algorithm based on FAHP to calculate the comprehensive utility value for each network. During the inspection process, the UAV selects the current optimal network based on the utility value. This method comprehensively considers the interrelationships between seven network attributes and three service requirements: voice, video, and web. It computes the utility scores for each switching scheme, effectively addressing the uncertainty and ambiguity in the network selection decision process.
2. System and Algorithm Model
3. Vertical Switching Strategy for Power Grid
3.1. UAV Trajectory Planning
3.2. Network Selection Algorithm Based on FAHP
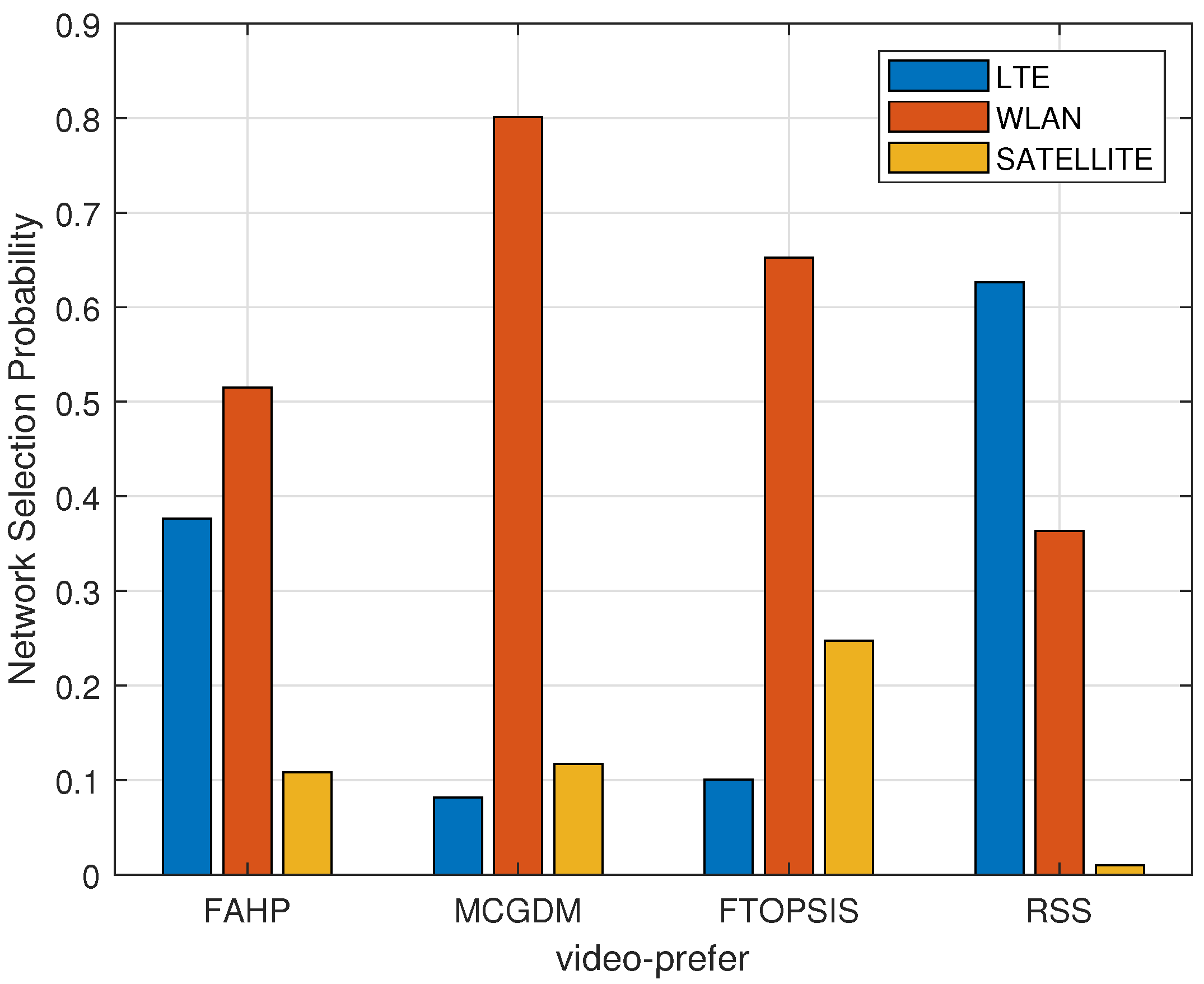
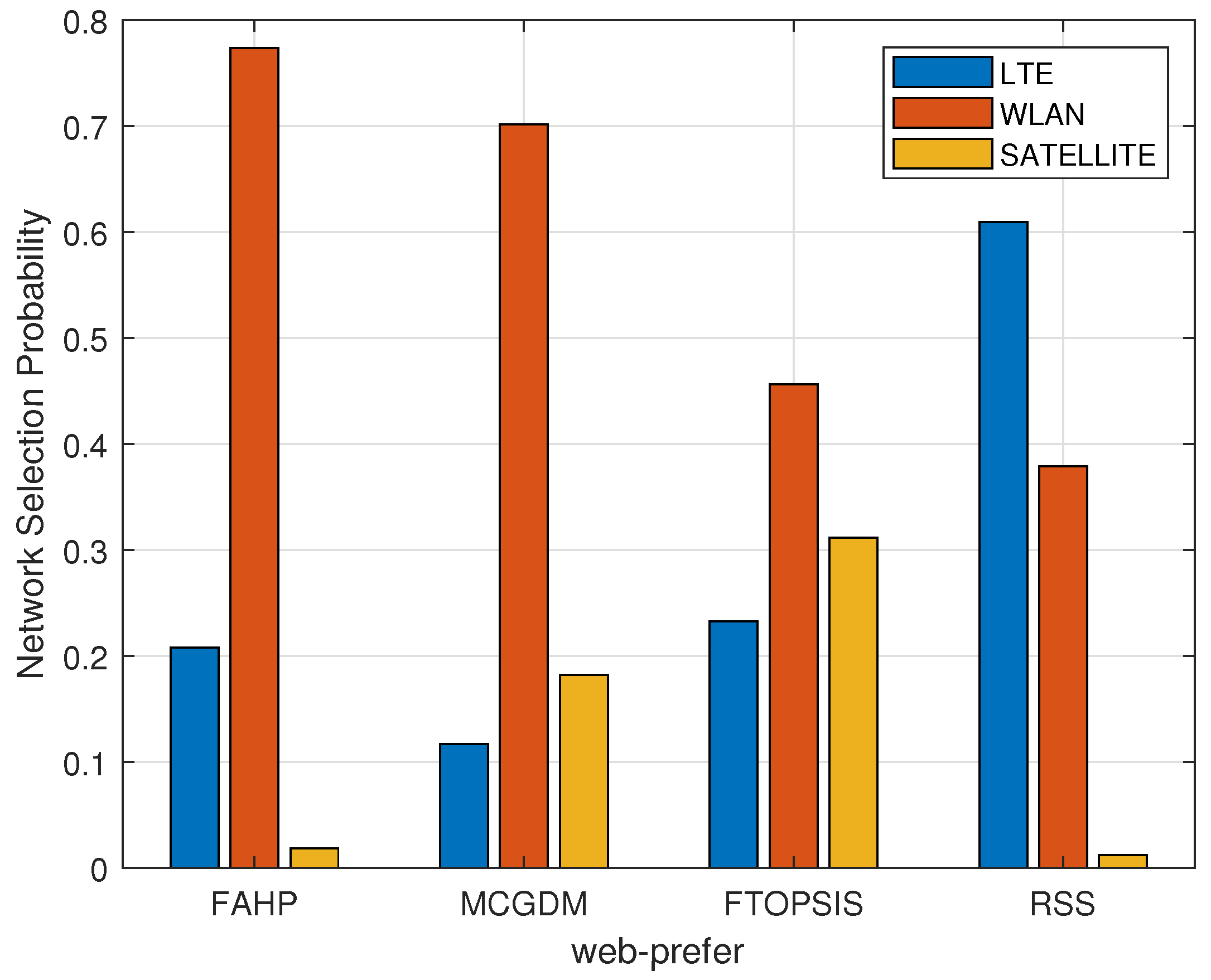
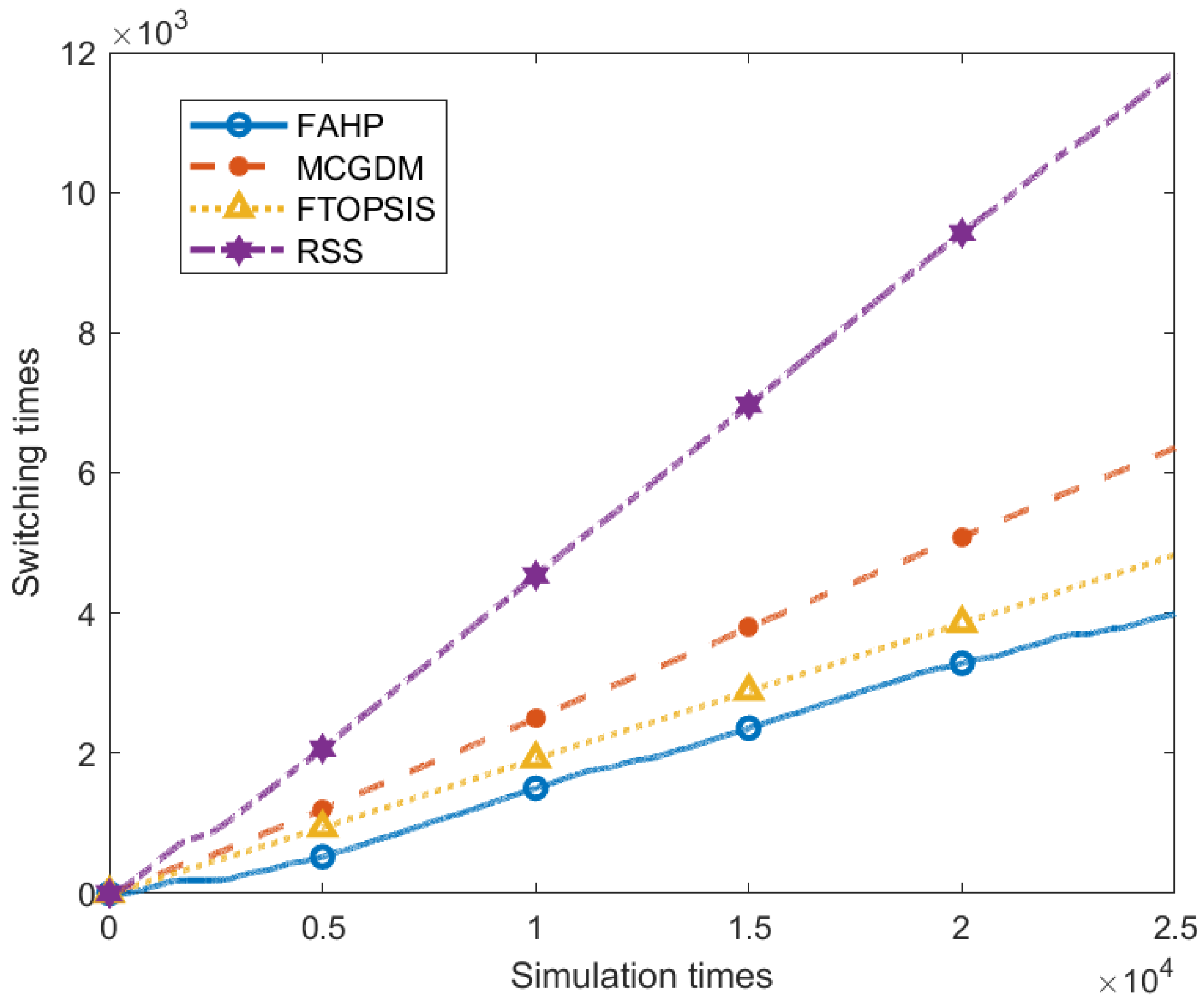
4. Numerical Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Lu, J.; Xu, Z.; Gong, G.; Liao, B. Design of Terminal Communication Access Architecture for Smart Power Distribution and Utilization Based on Integration of Multiple Technologies. Dianli Xitong Zidonghua/Automation Electr. Power Syst. 2018, 42, 163–169. [Google Scholar] [CrossRef]
- Ju, Y.; Cao, Z.; Chen, Y.; Liu, L.; Pei, Q.; Mumtaz, S.; Dong, M.; Guizani, M. NOMA-Assisted Secure Offloading for Vehicular Edge Computing Networks with Asynchronous Deep Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2024, 25, 2627–2640. [Google Scholar] [CrossRef]
- Ju, Y.; Yang, M.; Chakraborty, C.; Liu, L.; Pei, Q.; Xiao, M.; Yu, K. Reliability–Security Tradeoff Analysis in mmWave Ad Hoc–based CPS. ACM Trans. Sen. Netw. 2024, 20, 28. [Google Scholar] [CrossRef]
- Ju, Y.; Gao, Z.; Wang, H.; Liu, L.; Pei, Q.; Dong, M.; Mumtaz, S.; Leung, V.C.M. Energy-Efficient Cooperative Secure Communications in mmWave Vehicular Networks Using Deep Recurrent Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2024, 1–16. [Google Scholar] [CrossRef]
- Jiang, J.; Chen, C.; Zhou, Y.; Berretti, S.; Liu, L.; Pei, Q.; Zhou, J.; Wan, S. Heterogeneous Dynamic Graph Convolutional Networks for Enhanced Spatiotemporal Flood Forecasting by Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 3108–3122. [Google Scholar] [CrossRef]
- Chen, C.; Yue, P.; Si, J.; Lv, N.; Zhang, J.; Pei, Q.; Wan, S. A Safe-Distance Control Scheme to Avoid New Infection Like COVID-19 Virus Using Millimeter-Wave Radar. IEEE Sens. J. 2024, 24, 5687–5703. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, C.; Dong, M.; Ota, K.; Liu, L.; Dustdar, S. Multi-Agent Reinforcement Learning-Based Trading Decision-Making in Platooning-Assisted Vehicular Networks. IEEE/ACM Trans. Netw. 2023, 1–16. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, C.; Pei, Q.; Jiang, Z.; Xu, S. SFO: An Adaptive Task Scheduling based on Incentive Fleet Formation and Metrizable Resource Orchestration for Autonomous Vehicle Platooning. IEEE Trans. Mob. Comput. 2024, 23, 7695–7713. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Jiang, C.; Zhang, X.; Ren, Y.; Debbah, M. UAV-Enabled Covert Federated Learning. IEEE Trans. Wirel. Commun. 2023, 22, 6793–6809. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Jiang, C.; Meng, Z.; Chen, J.; Ren, Y. Efficient Federated Learning for Metaverse via Dynamic User Selection, Gradient Quantization and Resource Allocation. IEEE J. Sel. Areas Commun. 2024, 42, 850–866. [Google Scholar] [CrossRef]
- Liu, L.; Feng, J.; Mu, X.; Pei, Q.; Lan, D.; Xiao, M. Asynchronous Deep Reinforcement Learning for Collaborative Task Computing and On-Demand Resource Allocation in Vehicular Edge Computing. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15513–15526. [Google Scholar] [CrossRef]
- Kunarak, S.; Sulessathira, R.; Dutkiewicz, E. Vertical handoff with predictive RSS and dwell time. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Ayyappan, K.; Narasimman, K.; Dananjayan, P. SINR Based Vertical Handoff Scheme for QoS in Heterogeneous Wireless Networks. In Proceedings of the 2009 International Conference on Future Computer and Communication, Kuala Lumpar, Malaysia, 3–5 April 2009; pp. 117–121. [Google Scholar] [CrossRef]
- Lee, H.; Kim, D.; Chung, B.; Yoon, H. Adaptive Hysteresis Using Mobility Correlation for Fast Handover. IEEE Commun. Lett. 2008, 12, 152–154. [Google Scholar] [CrossRef]
- Liang, Y.H.; Chang, B.J.; Chen, C.T. Media Independent Handover-based Competitive On-Line CAC for Seamless Mobile Wireless Networks. Wirel. Pers. Commun. 2012, 67, 199–225. [Google Scholar] [CrossRef]
- Naeem, B.; Ngah, R.; Hashim, S.Z.M.; Maqbool, W. Vertical handover decision using history-based communication graph for heterogeneous networks. In Proceedings of the 2014 IEEE Conference on Open Systems (ICOS), Subang, Malaysia, 26–28 October 2014; pp. 7–11. [Google Scholar] [CrossRef]
- De Schepper, T.; Famaey, J.; Latré, S. Multi-technology Management of Heterogeneous Wireless Networks. In Proceedings of the NOMS 2020—2020 IEEE/IFIP Network Operations and Management Symposium, Budapest, Hungary, 20–24 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Manisha; Singh, N.P. Efficient network selection using game theory in a heterogeneous wireless network. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 10–12 December 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Niyato, D.; Hossain, E. A Noncooperative Game-Theoretic Framework for Radio Resource Management in 4G Heterogeneous Wireless Access Networks. IEEE Trans. Mob. Comput. 2008, 7, 332–345. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, J.; Huang, Q.; Wu, D. Game Theoretic Approach for Network Access Control in Heterogeneous Networks. IEEE Trans. Veh. Technol. 2018, 67, 9856–9866. [Google Scholar] [CrossRef]
- Debnath, A.; Kumar, N. Simple Additive Weighted Algorithm for Vertical Handover in Heterogeneous Network. In Proceedings of the 2020 2nd PhD Colloquium on Ethically Driven Innovation and Technology for Society (PhD EDITS), Bangalore, India, 8 November 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Goutam, S.; Unnikrishnan, S.; Prabavathy, S.S.; Karandikar, A.; Goutam, A. Algorithm for Network Selection based on SAW and MEW techniques. In Proceedings of the 2021 International Conference on Control, Automation, Power and Signal Processing (CAPS), Jabalpur, India, 10–12 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Goutam, S.; Unnikrishnan, S.; Karandikar, A. Algorithm for Vertical Handover using Network Fitness Function. In Proceedings of the 2021 International Conference on Control, Automation, Power and Signal Processing (CAPS), Jabalpur, India, 10–12 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, S.-m.; Pan, S.; Xu, M.-h. An improved TOPSIS vertical handoff algorithm for heterogeneous wireless networks. In Proceedings of the 2010 IEEE 12th International Conference on Communication Technology, Nanjing, China, 11–14 November 2010; pp. 750–754. [Google Scholar] [CrossRef]
- Bhosale, S.; Daruwala, R.D. Multi-criteria Vertical Handoff Decision Algorithm Using Hierarchy Modeling and Additive Weighting in an Integrated WiFi/WiMAX/UMTS Environment—A Case Study. KSII Trans. Internet Inf. Syst. 2014, 8, 35–57. [Google Scholar]
- Guo, X.; Omar, M.H.; Zaini, K.M.; Liang, G.; Lin, M.; Gan, Z. Multiattribute Access Selection Algorithm for Heterogeneous Wireless Networks Based on Fuzzy Network Attribute Values. IEEE Access 2022, 10, 74071–74081. [Google Scholar] [CrossRef]
- Jiang, F.; Feng, C.; Zhang, H. A heterogenous network selection algorithm for internet of vehicles based on comprehensive weight. Alex. Eng. J. 2021, 60, 4677–4688. [Google Scholar]
- Yu, H.; Ma, Y.; Yu, J. Network Selection Algorithm for Multiservice Multimode Terminals in Heterogeneous Wireless Networks. IEEE Access 2019, 7, 46240–46260. [Google Scholar] [CrossRef]
- Nguyen-Vuong, Q.T.; Ghamri-Doudane, Y.; Agoulmine, N. On utility models for access network selection in wireless heterogeneous networks. In Proceedings of the NOMS 2008—2008 IEEE Network Operations and Management Symposium, Salvador, Brazil, 7–11 April 2008; pp. 144–151. [Google Scholar] [CrossRef]
- Song, X.; Liu, W.; Zhang, M.; Liu, F. A network selection algorithm based on FAHP/GRA in heterogeneous wireless networks. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 1445–1449. [Google Scholar] [CrossRef]
- Evangeline, C.S.; Kumaravelu, V.B. A two-phase fuzzy based access network selection scheme for vehicular ad hoc networks. Peer-to-Peer Netw. Appl. 2021, 15, 107–133. [Google Scholar] [CrossRef]
- Ismail, A.; Hee Roh, B. Adaptive Handovers in heterogeneous networks using fuzzy MADM. In Proceedings of the International Conference on Mobile IT Convergence, Gumi, Republic of Korea, 26–28 September 2011; pp. 99–104. [Google Scholar]
- Zineb, A.B.; Ayadi, M.I.; Tabbane, S. Fuzzy MADM based vertical handover algorithm for enhancing network performances. In Proceedings of the 2015 23rd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 16–18 September 2015; pp. 153–159. [Google Scholar]
- Xiao, K.; Li, C. Vertical Handoff Decision Algorithm for Heterogeneous Wireless Networks Based on Entropy and Improved TOPSIS. In Proceedings of the 2018 IEEE 18th International Conference on Communication Technology (ICCT), Chongqing, China, 8–11 October 2018; pp. 706–710. [Google Scholar] [CrossRef]
- Kustiawan, I.; Liu, C.Y.; Hsu, D.F. Vertical Handoff Decision Using Fuzzification and Combinatorial Fusion. IEEE Commun. Lett. 2017, 21, 2089–2092. [Google Scholar] [CrossRef]
- Sasirekha, V.; Chandrasekar, C.; Ilangkumaran, M. Heterogeneous wireless network vertical handoff decision using hybrid multi-criteria decision-making technique. Int. J. Comput. Sci. Eng. 2015, 10, 263–280. [Google Scholar] [CrossRef]
- Liao, H.; Tie, L.; Du, Z. A Vertical Handover Decision Algorithm Based on Fuzzy Control Theory. In Proceedings of the First International Multi-Symposiums on Computer and Computational Sciences (IMSCCS’06), Hangzhou, China, 20–24 June 2006; Volume 2, pp. 309–313. [Google Scholar] [CrossRef]
- Tao, Y.; Peng, R. A fuzzy logic vertical handoff algorithm with motion trend decision. In Proceedings of the 2011 6th International Forum on Strategic Technology, Harbin, China, 22–24 August 2011; Volume 2, pp. 1280–1283. [Google Scholar] [CrossRef]
- van Laarhoven, P.; Pedrycz, W. A fuzzy extension of Saaty’s priority theory. Fuzzy Sets Syst. 1983, 11, 229–241. [Google Scholar] [CrossRef]
- Chen, X.; Chen, C.; He, J.; Guan, X. Intuitionistic fuzzy handover mechanism for heterogeneous vehicular networks. In Proceedings of the 2017 IEEE/CIC International Conference on Communications in China (ICCC), Qingdao, China, 22–24 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Rashid, T.; Ali, A.; Guirao, J.L.G.; Valverde, A. Comparative Analysis of Hybrid Fuzzy MCGDM Methodologies for Optimal Robot Selection Process. Symmetry 2021, 13, 839. [Google Scholar] [CrossRef]
- Mansouri, M.; Leghris, C.; Machaj, J. A Use of Fuzzy TOPSIS to Improve the Network Selection in Wireless Multiaccess Environments. J. Comput. Netw. Commun. 2020, 2020, 3408326. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Items | What Needs to Be Checked |
|---|---|---|
| 1 | Power poles | Whether the tower is deformed or tilted |
| 2 | Power poles base | Nearby ground conditions |
| 3 | Power wires | Whether the installed nuts or bolts pop out |
| 4 | Transmission lines | Whether it is damaged, rusted, or entangled in foreign objects |
| 5 | Lightning rods, grounding devices | Whether the discharge gap between the two has changed significantly |
| Attributes/Service | Voice | Video | Web |
|---|---|---|---|
| RSS (dBm) | ∼ | ∼ | ∼ |
| Bandwidth (kbs) | 32∼64 | 512∼5000 | 128∼1000 |
| Delay (ms) | 50∼100 | 75∼150 | 250∼500 |
| Jitter (ms) | 50∼100 | 40∼70 | 10∼150 |
| Loss Rate (%) | <30 | <30 | <30 |
| Net Load (%) | <80 | <80 | <80 |
| Cost | <50 | <50 | <50 |
| Bandwidth (kbs) | Delay (ms) | Jitter (ms) | Loss Rate (%) | Net Load (%) | Cost | |
|---|---|---|---|---|---|---|
| Satellite | 1200–4000 | 90–150 | 50–80 | 10–25 | 15–50 | 30–60 |
| LTE | 800–4000 | 40–80 | 15–40 | 6–20 | 30–50 | 10–45 |
| WLAN | 1000–8000 | 70–100 | 30–70 | 4–15 | 20–50 | 0–20 |
| Voice | RSS | Bandwidth | Delay | Jitter | Loss Rate | Net Load | Cost | Weight |
|---|---|---|---|---|---|---|---|---|
| RSS | (1,1,3) | (3,5,7) | (0.2,0.33,1) | (1,3,5) | (1,3,5) | (5,7,9) | (0.25,0.5,1) | 0.1660 |
| Bandwidth | (0.14,0.2,0.33) | (1,1,3) | (0.25,0.5,1) | (0.17,0.25,0.5) | (1,2,4) | (2,4,6) | (0.125,0.17,0.25) | 0.1113 |
| Delay | (1,3,5) | (1,2,4) | (1,1,3) | (0.2,0.33,1) | (1,3,5) | (3,5,7) | (0.14,0.2,0.33) | 0.1427 |
| Jitter | (0.2,0.33,1) | (2,4,6) | (1,3,5) | (1,1,3) | (3,5,7) | (5,7,9) | (0.2,0.33,1) | 0.1702 |
| Loss Rate | (0.2,0.33,1) | (0.25,0.5,1) | (0.2,0.33,1) | (0.14,0.2,0.33) | (1,1,3) | (1,1,3) | (0.11,0.14,0.2) | 0.0958 |
| Net Load | (0.11,0.14,0.2) | (0.17,0.25,0.5) | (0.14,0.2,0.33) | (0.11,0.14,0.2) | (1,1,3) | (1,1,3) | (0.11,0.14,0.2) | 0.0869 |
| Cost | (1,2,4) | (4,6,8) | (3,5,7) | (1,3,5) | (5,7,9) | (5,7,9) | (1,1,3) | 0.2226 |
| Video | RSS | Bandwidth | Delay | Jitter | Loss Rate | Net Load | Cost | Weight |
|---|---|---|---|---|---|---|---|---|
| RSS | (1,1,3) | (0.2,0.33,1) | (3,5,7) | (5,7,9) | (1,3,5) | (4,6,8) | (1,3,5) | 0.1903 |
| Bandwidth | (1,3,5) | (1,1,3) | (1,2,4) | (0.17,0.25,0.5) | (4,6,8) | (6,8,9) | (4,6,8) | 0.1884 |
| Delay | (0.14,0.2,0.33) | (0.25,0.5,1) | (1,1,3) | (0.14,0.2,0.33) | (1,3,5) | (5,7,9) | (1,3,5) | 0.1346 |
| Jitter | (0.11,0.14,0.2) | (2,4,6) | (3,5,7) | (1,1,3) | (5,7,9) | (1,3,5) | (5,7,9) | 0.1950 |
| Loss Rate | (0.2,0.33,1) | (0.125,0.17,0.25) | (0.2,0.33,1) | (0.11,0.14,0.2) | (1,1,3) | (1,2,4) | (1,1,3) | 0.1028 |
| Net Load | (0.125,0.17,0.25) | (0.11,0.125,0.17) | (0.11,0.14,0.2) | (0.2,0.33,1) | (1,1,3) | (1,1,3) | (1,1,3) | 0.0879 |
| Cost | (0.2,0.33,1) | (0.125,0.17,0.25) | (0.2,0.33,1) | (0.11,0.14,0.2) | (1,1,3) | (1,1,3) | (1,1,3) | 0.1009 |
| Web | RSS | Bandwidth | Delay | Jitter | Loss Rate | Net Load | Cost | Weight |
|---|---|---|---|---|---|---|---|---|
| RSS | (1,1,3) | (0.2,0.33,1) | (3,5,7) | (3,5,7) | (0.2,0.33,1) | (4,6,8) | (0.14,0.2,0.33) | 0.1499 |
| Bandwidth | (1,3,5) | (1,1,3) | (3,5,7) | (4,6,8) | (0.25,0.5,1) | (5,7,9) | (1,2,4) | 0.1869 |
| Delay | (0.14,0.2,0.33) | (0.14,0.2,0.33) | (1,1,3) | (1,2,4) | (0.125,0.17,0.25) | (1,3,5) | (0.17,0.25,0.5) | 0.1037 |
| Jitter | (0.14,0.2,0.33) | (0.125,0.17,0.25) | (0.25,0.5,1) | (1,1,3) | (0.11,0.14,0.2) | (1,1,3) | (0.14,0.2,0.33) | 0.0879 |
| Loss Rate | (1,3,5) | (1,2,4) | (4,6,8) | (5,7,9) | (1,1,3) | (6,8,9) | (1,3,5) | 0.2097 |
| Net Load | (0.125,0.17,0.25) | (0.11,0.14,0.2) | (0.2,0.33,1) | (1,1,3) | (0.11,0.125,0.17) | (1,1,3) | (0.11,0.14,0.2) | 0.0874 |
| Cost | (3,5,7) | (0.25,0.5,1) | (2,4,6) | (3,5,7) | (0.2,0.33,1) | (5,7,9) | (1,1,3) | 0.1744 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Lv, Z.; Xu, X.; Cong, L.; Huang, C. Vertical Switching Algorithm for Unmanned Aerial Vehicle in Power Grid Heterogeneous Communication Networks. Electronics 2024, 13, 2612. https://doi.org/10.3390/electronics13132612
Wang Z, Lv Z, Xu X, Cong L, Huang C. Vertical Switching Algorithm for Unmanned Aerial Vehicle in Power Grid Heterogeneous Communication Networks. Electronics. 2024; 13(13):2612. https://doi.org/10.3390/electronics13132612
Chicago/Turabian StyleWang, Zhiyi, Zhiyao Lv, Xiaolong Xu, Li Cong, and Chengbin Huang. 2024. "Vertical Switching Algorithm for Unmanned Aerial Vehicle in Power Grid Heterogeneous Communication Networks" Electronics 13, no. 13: 2612. https://doi.org/10.3390/electronics13132612
APA StyleWang, Z., Lv, Z., Xu, X., Cong, L., & Huang, C. (2024). Vertical Switching Algorithm for Unmanned Aerial Vehicle in Power Grid Heterogeneous Communication Networks. Electronics, 13(13), 2612. https://doi.org/10.3390/electronics13132612