
Performance Analysis of Internet of Vehicles Mesh Networks Based on Actual Switch Models


Abstract
1. Introduction
2. Related Works
3. Network Architecture and System Model
3.1. Network Model
3.2. Task Generation Model
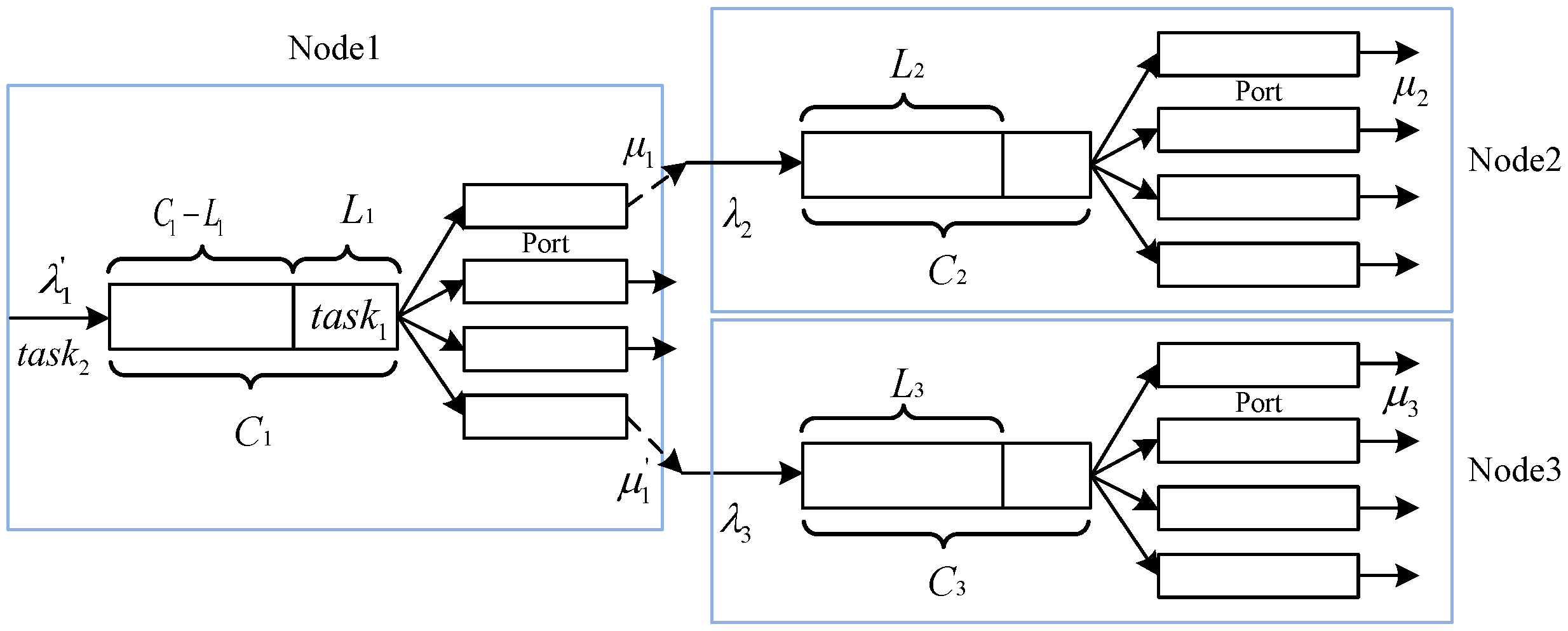
3.3. Task Forwarding Model
4. Network Indicator System Construction
4.1. Packet Loss Rate
4.2. Task Arrival Rate
4.3. Node Load Rate
4.4. Link Load Rate
4.5. Total Network Traffic
5. Simulation Results
5.1. Network Performance for Different QoS
5.2. Network Performance for Different Caching Capacities
5.3. Network Performance for Different Vehicle Densities
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the internet of vehicles: Network architectures and applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Gyawali, S.; Xu, S.; Qian, Y.; Hu, R.Q. Challenges and solutions for cellular based V2X communications. IEEE Commun. Surv. Tutor. 2020, 23, 222–255. [Google Scholar] [CrossRef]
- Ang, L.M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for smart cities: Applications, architecture, and challenges. IEEE Access 2018, 7, 6473–6492. [Google Scholar] [CrossRef]
- Wang, T.H.; Manivasagam, S.; Liang, M.; Yang, B.; Zeng, W.; Urtasun, R. V2vnet: Vehicle-to-vehicle communication for joint perception and prediction. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 605–621. [Google Scholar]
- Sun, P.; Aljeri, N.; Boukerche, A. Machine learning-based models for real-time traffic flow prediction in vehicular networks. IEEE Netw. 2020, 34, 178–185. [Google Scholar] [CrossRef]
- Killat, M.; Hartenstein, H. An empirical model for probability of packet reception in vehicular ad hoc networks. Eurasip J. Wirel. Commun. 2009, 1–12. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, M.; Cai, Z.; Guan, X.; Ohtsuki, T.; Zhang, Y. Graph theory based capacity analysis for vehicular ad hoc networks. In Proceedings of the IEEE Global Communications Conference, San Diego, CA, USA, 6–10 December 2015; pp. 1–5. [Google Scholar]
- Kwon, S.; Kim, Y.; Shroff, N.B. Analysis of connectivity and capacity in 1-D vehicle-to-vehicle networks. IEEE Trans. Wirel. Commun. 2016, 15, 8182–8194. [Google Scholar] [CrossRef]
- Chen, J.; Mao, G.; Li, C.; Zafar, A.; Zomaya, A.Y. Throughput of infrastructure-based cooperative vehicular networks. IEEE Trans. Intell. Transp. 2017, 18, 2964–2979. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, X. Vehicle communication network in intelligent transportation system based on Internet of Things. Comput. Commun. 2020, 160, 799–806. [Google Scholar] [CrossRef]
- Kassir, S.; Garces, P.C.; de Veciana, G.; Wang, N.; Wang, X.; Palacharla, P. An analytical model and performance evaluation of multihomed multilane VANETs. IEEE/ACM Trans. Netw. 2020, 29, 346–359. [Google Scholar] [CrossRef]
- Aljabry, I.A.; Al-Suhail, G.A. A qos evaluation of aodv topology-based routing protocol in vanets. In Proceedings of the International Conference on Engineering & MIS, Istanbul, Turkey, 4–6 July 2022; pp. 1–6. [Google Scholar]
- Gupta, P.; Kumar, P.R. The capacity of wireless networks. IEEE Trans. Inform. Theory 2000, 46, 388–404. [Google Scholar] [CrossRef]
- Vinh, H.D.; Hoang, T.M.; Hiep, P.T. Outage probability of dual-hop cooperative communication networks over the Nakagami-m fading channel with RF energy harvesting. Ann. Telecommun. 2021, 76, 63–72. [Google Scholar] [CrossRef]
- Olmedo, G.; Lara-Cueva, R.; Martínez, D.; de Almeida, C. Performance analysis of a novel TCP protocol algorithm adapted to wireless networks. Future Internet 2020, 12, 101. [Google Scholar] [CrossRef]
- Li, J.; Safaei, F. Outage probability and throughput analyses in full-duplex relaying systems with energy transfer. IEEE Access 2020, 8, 150150–150161. [Google Scholar] [CrossRef]
- Rahmani, M.; Steffen, R.; Tappayuthpijarn, K.; Steinbach, E.; Giordano, G. Performance analysis of different network topologies for in-vehicle audio and video communication. In Proceedings of the International Telecommunication Networking Workshop on QoS in Multiservice IP Networks, Venezia, Italy, 13–15 February 2008; pp. 179–184. [Google Scholar]
- Nekoui, M.; Eslami, A.; Pishro-Nik, H. Scaling laws for distance limited communications in vehicular ad hoc networks. In Proceedings of the IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 2253–2257. [Google Scholar]
- Lu, N.; Luan, T.H.; Wang, M.; Shen, X.; Bai, F. Bounds of asymptotic performance limits of social-proximity vehicular networks. IEEE/ACM Trans. Netw. 2013, 22, 812–825. [Google Scholar] [CrossRef]
- Wang, M.; Shan, H.; Luan, T.H.; Lu, N.; Zhang, R.; Shen, X.; Bai, F. Asymptotic throughput capacity analysis of VANETs exploiting mobility diversity. IEEE Trans. Veh. Technol. 2014, 64, 4187–4202. [Google Scholar] [CrossRef]
- Sarvade, V.P.; Kulkarni, S.A. Performance analysis of IEEE 802.11 ac for vehicular networks using realistic traffic scenarios. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics, Udupi, India, 13–16 September 2017; pp. 137–141. [Google Scholar]
- Lai, W.; Ni, W.; Wang, H.; Liu, R.P. Analysis of average packet loss rate in multi-hop broadcast for VANETs. IEEE Commun. Lett. 2017, 22, 157–160. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y.; Lu, H.; Li, Z.; Ma, X. Interference-based QoS and capacity analysis of VANETs for safety applications. IEEE Trans. Veh. Technol. 2021, 70, 2448–2464. [Google Scholar] [CrossRef]
- Han, R.; Guan, Q.; Yu, F.R.; Shi, J.; Ji, F. Congestion and position aware dynamic routing for the internet of vehicles. IEEE Trans. Veh. Technol. 2020, 69, 16082–16094. [Google Scholar] [CrossRef]
- Jiang, D.; Wang, Z.; Huo, L.; Xie, S. A performance measurement and analysis method for software-defined networking of IoV. IEEE Trans. Intell. Transp. 2020, 22, 3707–3719. [Google Scholar] [CrossRef]
- Wang, H.; Yang, W.; Wei, W. Efficient algorithms for urban vehicular Ad Hoc networks quality based on average network flows. Peer-to-Peer Netw. Appl. 2024, 17, 115–124. [Google Scholar] [CrossRef]
- Zheng, Z.; Yue, W.; Li, C.; Duan, P.; Cao, X.; Yue, P.; Wu, J. Capacity of Vehicular Networks in Mixed Traffic with CAVs and Human-Driven Vehicles. IEEE Internet Things 2024, 11, 17852–17865. [Google Scholar] [CrossRef]
- Gupta, D.; Uppal, A.; Walani, A.; Singh, D.; Saini, A.S. Performance Analysis of Stationary and Moving V2V Communications Using NS3. In Proceedings of Advances in Smart Communication and Imaging Systems: Select Proceedings of MedCom 2020; Springer: Singapore, 2021; pp. 475–483. [Google Scholar]
- Malnar, M.; Jevtić, N. A framework for performance evaluation of VANETs using NS-3 simulator. Promet-Zagreb 2020, 32, 255–268. [Google Scholar] [CrossRef]
- Park, C.; Park, S. Performance evaluation of zone-based in-vehicle network architecture for autonomous vehicles. Sensors 2023, 23, 669. [Google Scholar] [CrossRef]
- Technical Specification Group Radio Access Network. Study LTE-Based V2X Services, Release 14, Document 3GPP TR 36.885 V14.0.0, 3rd Generation Partnership Project. 2016. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2934 (accessed on 29 May 2024).
- Zhang, J.; Guo, H.; Liu, J.; Zhang, Y. Task offloading in vehicular edge computing networks: A load-balancing solution. IEEE Trans. Veh. Technol. 2019, 69, 2092–2104. [Google Scholar] [CrossRef]
- Al-Hilo, A.; Ebrahimi, D.; Sharafeddine, S.; Assi, C. Vehicle-assisted RSU caching using deep reinforcement learning. IEEE Trans. Emerg. Top. Comput. 2021. [Google Scholar] [CrossRef]
- Heo, J.; Kang, B.; Yang, J.M.; Paek, J.; Bahk, S. Performance-cost tradeoff of using mobile roadside units for V2X communication. IEEE Trans. Veh. Technol. 2019, 68, 9049–9059. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, P.; Feng, J.; Zhang, Y.; Mumtaz, S.; Rodriguez, J. Computation resource allocation and task assignment optimization in vehicular fog computing: A contract-matching approach. IEEE Trans. Veh. Technol. 2019, 68, 3113–3125. [Google Scholar] [CrossRef]
- Ma, B.; Ren, Z.; Cheng, W. Traffic routing-based computation offloading in cybertwin-driven internet of vehicles for v2x applications. IEEE Trans. Veh. Technol. 2021, 71, 4551–4560. [Google Scholar] [CrossRef]
- Hou, X.; Ren, Z.; Wang, J.; Cheng, W.; Ren, Y.; Chen, K.C.; Zhang, H. Reliable computation offloading for edge-computing-enabled software-defined IoV. IEEE Internet Things 2020, 7, 7097–7111. [Google Scholar] [CrossRef]
- Chang, Q.; Zhang, Z.; Wei, F.; Wang, J.; Pedrycz, W.; Pal, N.R. Adaptive Nonstationary Fuzzy Neural Network. Knowl.-Based Syst. 2024, 288, 111398. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wang, J.; Jin, Y. An enhanced competitive swarm optimizer with strongly convex sparse operator for large-scale multiobjective optimization. IEEE Trans. Evol. Comput. 2021, 26, 859–871. [Google Scholar] [CrossRef]
- Sun, Q.; Xue, Y.; Li, S.; Zhu, Z. Design and demonstration of high-throughput protocol oblivious packet forwarding to support software-defined vehicular networks. IEEE Access 2017, 5, 24004–24011. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| V2V link bandwidth | 20 MHz | V2I link bandwidth | 40 MHz |
| Vehicle transmission power | 100 mW | RSU transmission power | 20 dBm |
| Background noise power | −100 dBm | Absolute vehicle speed | [20, 40] km/h |
| Maximum communication range of the vehicle | 200 m | RSU coverage range | 500 m |
| Size of vehicle cache | 100 Mb | Size of RSU cache | 500 Mb |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Ren, Z.; Cheng, W.; Shuai, Z.; Li, Z. Performance Analysis of Internet of Vehicles Mesh Networks Based on Actual Switch Models. Electronics 2024, 13, 2605. https://doi.org/10.3390/electronics13132605
Hu J, Ren Z, Cheng W, Shuai Z, Li Z. Performance Analysis of Internet of Vehicles Mesh Networks Based on Actual Switch Models. Electronics. 2024; 13(13):2605. https://doi.org/10.3390/electronics13132605
Chicago/Turabian StyleHu, Jialin, Zhiyuan Ren, Wenchi Cheng, Zhiliang Shuai, and Zhao Li. 2024. "Performance Analysis of Internet of Vehicles Mesh Networks Based on Actual Switch Models" Electronics 13, no. 13: 2605. https://doi.org/10.3390/electronics13132605
APA StyleHu, J., Ren, Z., Cheng, W., Shuai, Z., & Li, Z. (2024). Performance Analysis of Internet of Vehicles Mesh Networks Based on Actual Switch Models. Electronics, 13(13), 2605. https://doi.org/10.3390/electronics13132605