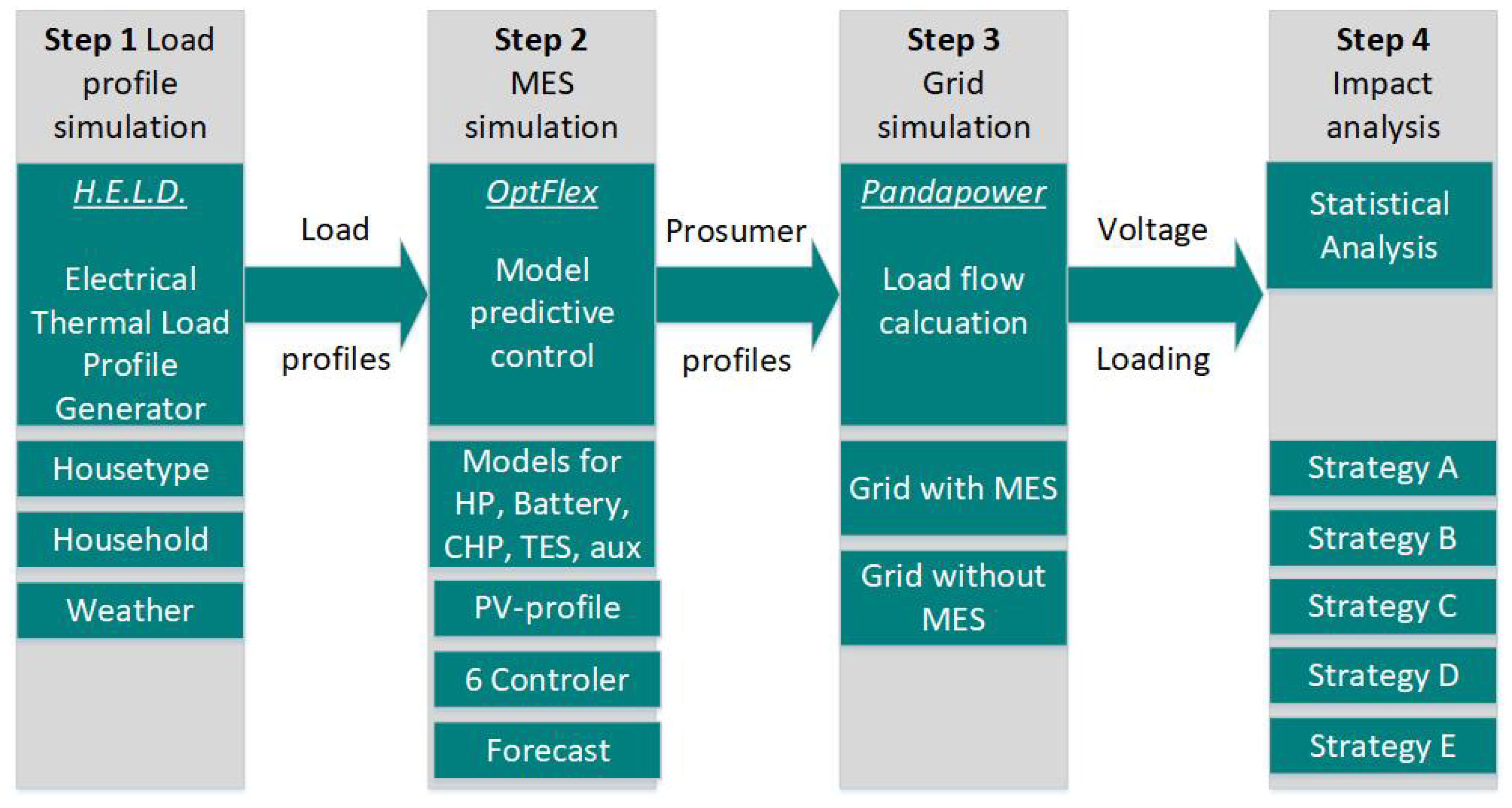
2.2. Step 2: MES Simulation (OptFlex)
Residential standard load profiles are commonly utilized directly as input for time-series-based power grid simulations and grid expansion planning. However, this assumption holds true only when no intelligent MESs are employed to optimize the energy supply within the household.
The OptFlex framework was developed in anticipation of a future where most households are equipped with MESs featuring intelligent controls [
27]. This model aims to simulate the grid profiles of different MES types with varying control algorithms. The method implemented in the OptFlex model involves an optimized Model Predictive Control (MPC) algorithm based on a mixed-integer linear problem (MILP). This algorithm calculates time schedules for each component of the MES for the next 6 h (prediction horizon). The initial values of these time schedules are then used as set points for the components. The MPC is realized with two distinct cost functions: minimizing operational costs and minimizing CO
2 emissions [
28].
Three different types of MESs are modeled with distinct control approaches:
One of these consists of a lithium-ion battery and a photovoltaic (PV) system. Note: PV-battery systems do not typically qualify as MESs since they lack thermal components. However, in our model, I assumed that PV-battery houses are equipped with oil or gas burners, which are independently controlled and therefore not explicitly modeled here.
One of these consists of a lithium-ion battery, a heat pump (HP), a thermal storage, and an electrical heater.
One of these consists of a lithium-ion battery, a combined heat and power (CHP) plant, a thermal storage, and a gas boiler.
It is important to note that while PV-battery systems do not inherently include thermal components, our model assumes the presence of oil or gas burners in PV-battery houses. These burners are independently controlled and were thus not explicitly modeled here. The addition of the PV battery system to our impact analysis will help us calculate the impact of additional heating systems compared to pure electricity prosumers.
The objective function
of the cost-MPC is formulated to achieve minimal operational costs. For the PV-CHP energy system, the function is presented by the following equation:
with
as the prediction horizon;
, the gas cost;
, the electricity cost;
, the CHP cold start costs;
, the feed-in tariff for CHP-generated electricity;
, the feed-in tariff for PV-generated electricity;
, the self-consumption;
, the energy produced by the CHP;
, the energy produced by the gas boiler;
, the energy imported from the grid;
, the binary variable used to turn the CHP plant on and off;
, the energy produced by the CHP plant and exported to the grid;
, the energy produced by the CHP plant and consumed directly by the household load; and
, the energy produced by the PV systems and exported to the grid. The calculation is processed for each time step
k of the studied time period, such as one day or one year.
The objective function for the PV-HP systems is formulated as
The objective function for the PV-battery systems is the same equation as for the PV-HP system, formulated as:
If not specified otherwise, the costs are set at EUR 0.0652 for natural gas and EUR 0.2838 for electricity. The feed-in tariffs are EUR 0.1256 for PV and EUR 0.09392 for CHP. Moreover, for the CHP system, a cold start cost of EUR 0.02 Euro is considered, and energy provided by the CHP, which is consumed within the household, is reimbursed with EUR 0.005.
The objective function
of the Model Predictive Control (MPC) is formulated to achieve minimal CO
2 production. The following equations present the function:
where
is the prediction horizon,
is the emission coefficient of natural gas,
is the emission coefficient of the Germany electricity mix,
is the emission coefficient of PV energy,
is the energy provided by the gas boiler,
is the energy provided by the CHP,
is the energy provided by the grid,
is the energy exported to the grid,
is the energy charged into the battery; and
is the energy directly consumed by the household load.
The objective function for the PV-HP energy systems is formulated as
where
is the prediction horizon,
is the emission coefficient of the Germany electricity mix,
is the emission coefficient of the PV energy,
is the energy provided by the grid,
is the PV energy consumed by the electrical heater,
is the PV energy consumed by the HP,
is the energy exported to the grid,
is the energy charged into the battery; and
is the energy directly consumed by the household load.
The objective function for the PV-battery systems is formulated as
where
is the prediction horizon,
is the emission coefficient of the Germany electricity mix,
is the energy provided by the grid,
is the emission coefficient of the PV energy,
is the energy of the PV system exported to the grid,
is the energy charged into the battery, and
is the energy directly consumed by the household load.
The emission coefficients were chosen to be 587 g/kWh for the German electricity mix, 202 g/kWh for natural gas, and 0 g/kWh for PV-generated energy.
Additional constraints, including the electrical and thermal energy balance, are necessary to evaluate the objective functions. Detailed constraints and a comprehensive parameter description can be found in the Appendix of [
27,
28,
29] and in
Appendix B of this paper. The optimization problem is solved using Pyomo 5.7.2 [
30,
31] with a CPLEX solver by IBM (Armonk, NY, USA).
The output time profiles obtained from the previous section are utilized as input for the MES control algorithm. Time profiles for the energy system parameters, including profiles at the MES’s grid connection points, are then calculated. In total, 12 optimized PV-Battery systems, 7 optimized PV-HP systems, and 4 optimized PV-CHP systems were modeled. The number of systems corresponds to the number of buses in the distribution grid feeder in the subsequent section.
The MES simulation using the OptFlex framework was conducted for the following control strategies, motivated by [
29]. The assumptions are also summarized in
Table 3:
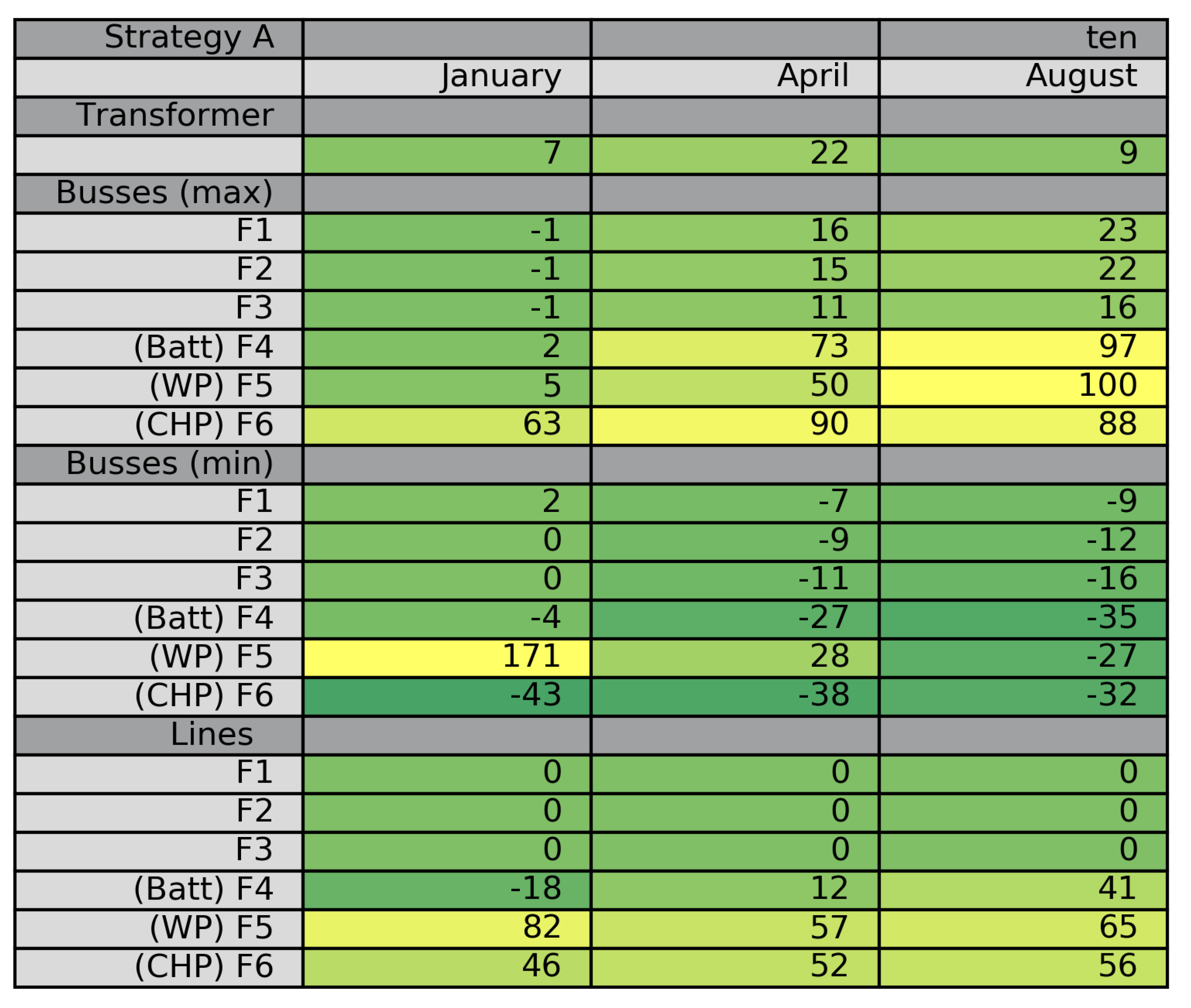
The MPC control is optimized for operational costs, assuming constant electricity costs. The parameters for feed-in incentives and other factors are set as follows: natural gas, EUR 0.0652; electricity, EUR 0.2838; feed-in tariff for PV, EUR 0.1256; feed-in tariff for CHP, EUR 0.09392; cold-start cost for CHP, EUR 0.02; and reimbursement for energy provided by CHP consumed within the household, EUR 0.005.
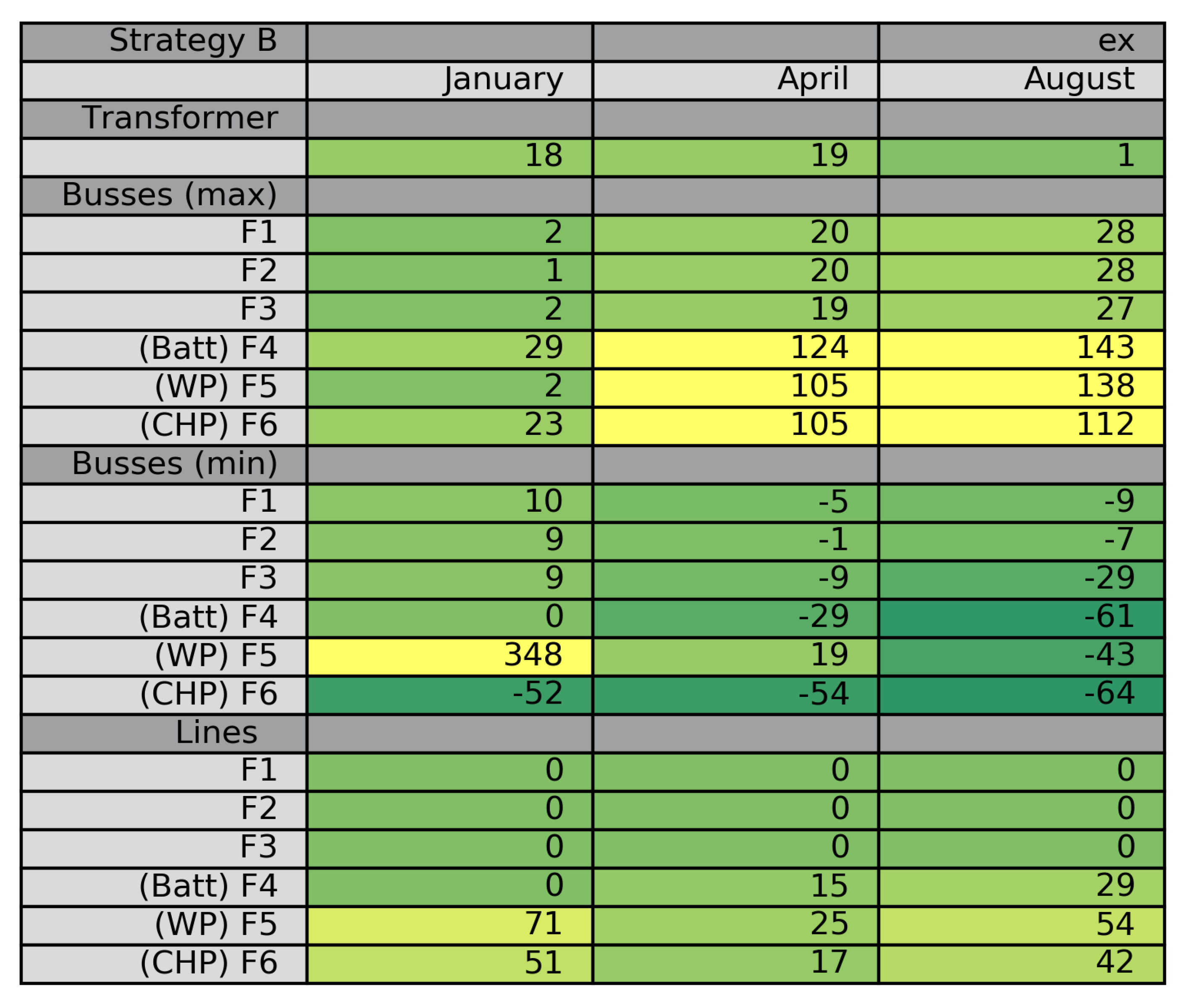
The MPC control is optimized for operational costs, with constant electricity costs assumed. A perfect forecast method is selected. No feed-in incentives are assumed; hence, the PV and CHP feed-in tariff and self-consumption reimbursement are set to zero. The cost for the cold start of the CHP and the electricity/gas costs are chosen as in Strategy A.
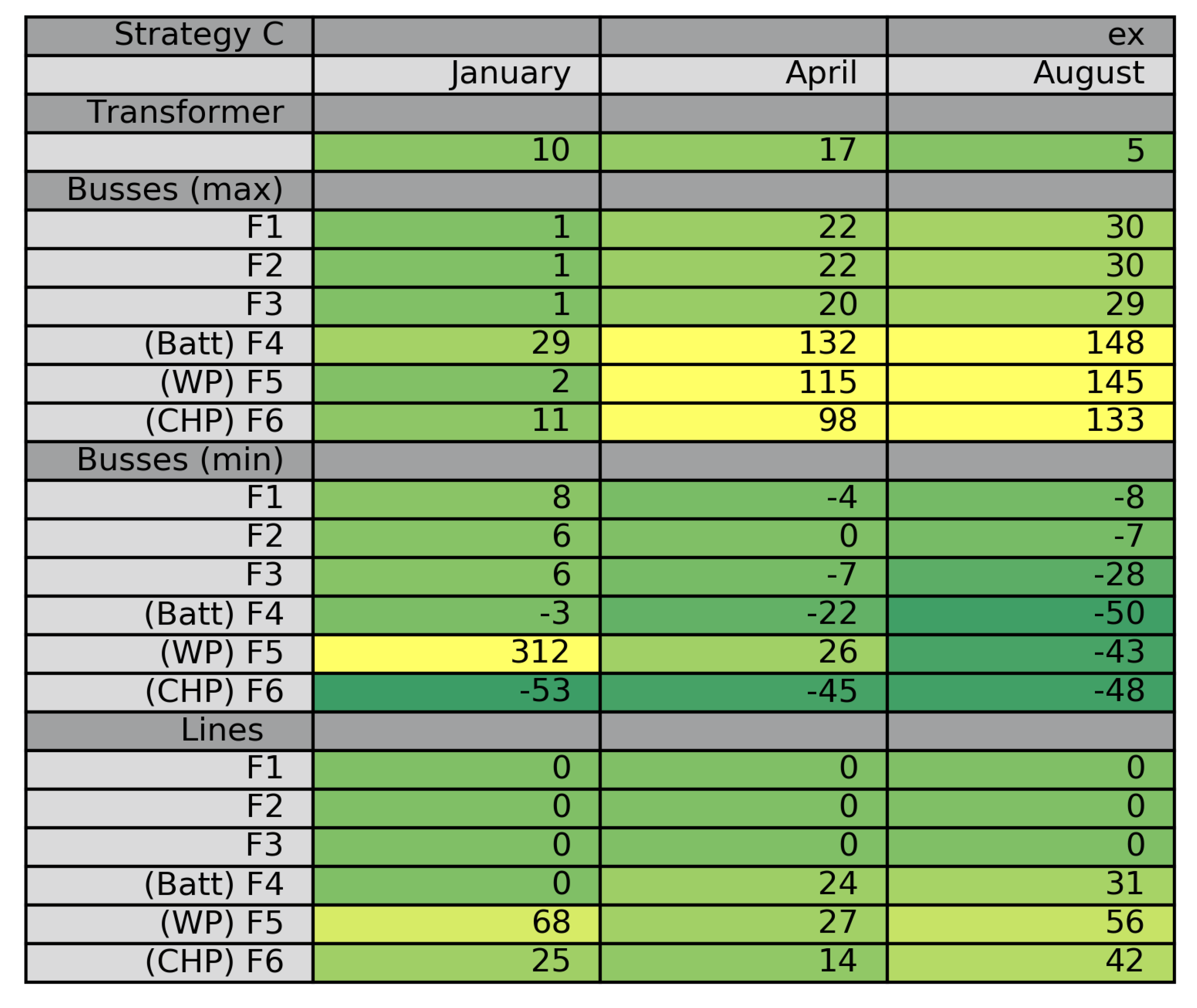
The MPC control is optimized for minimal CO2 emission, with emission coefficients set as follows: 587 g/kWh for the German electricity mix, 202 g/kWh for natural gas, and 0 g/kWh for PV-generated energy. Constant electricity costs are assumed. The forecast method is chosen to be perfect forecast. No other feed-in incentives are assumed and are set to zero as in Strategy B.
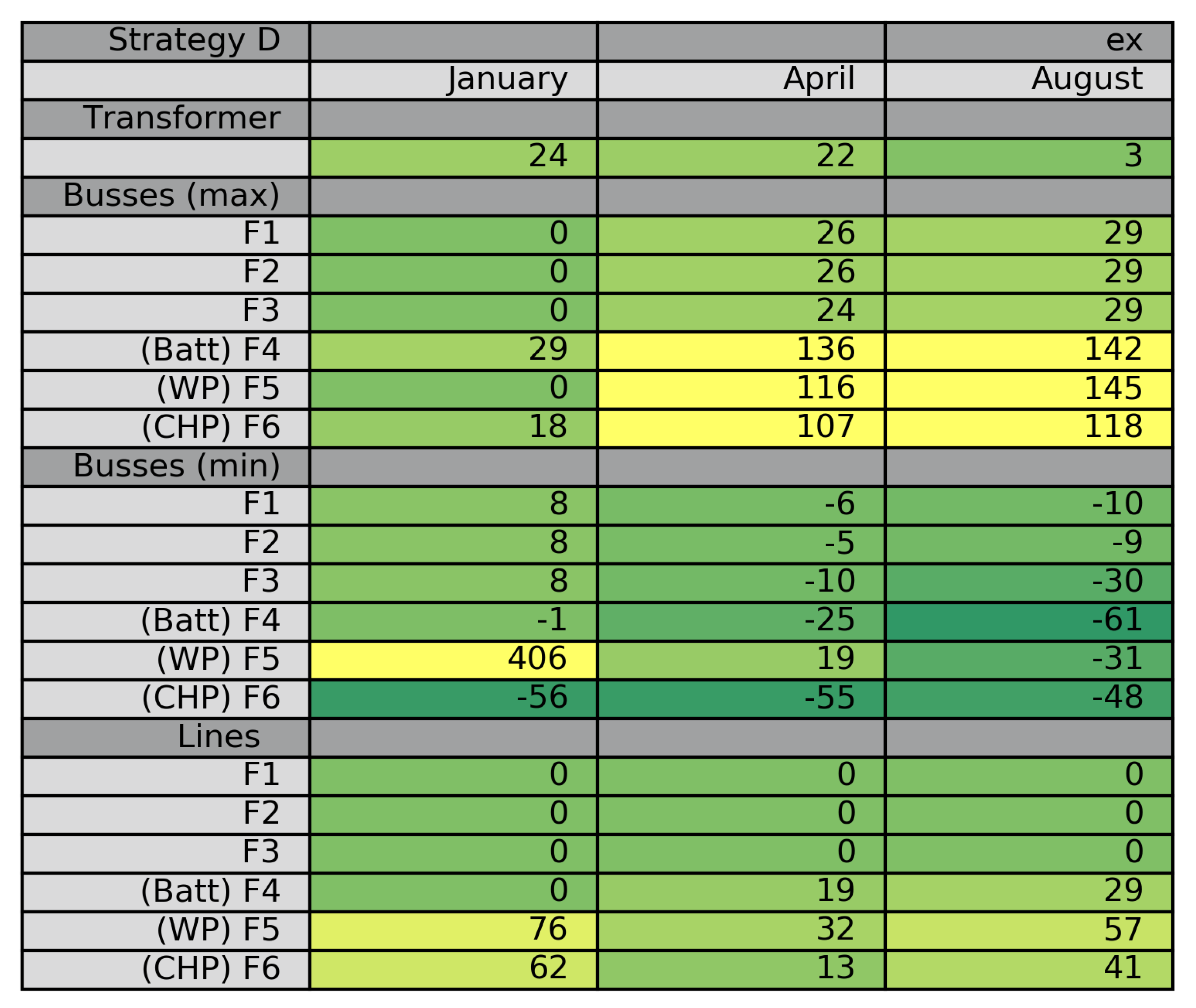
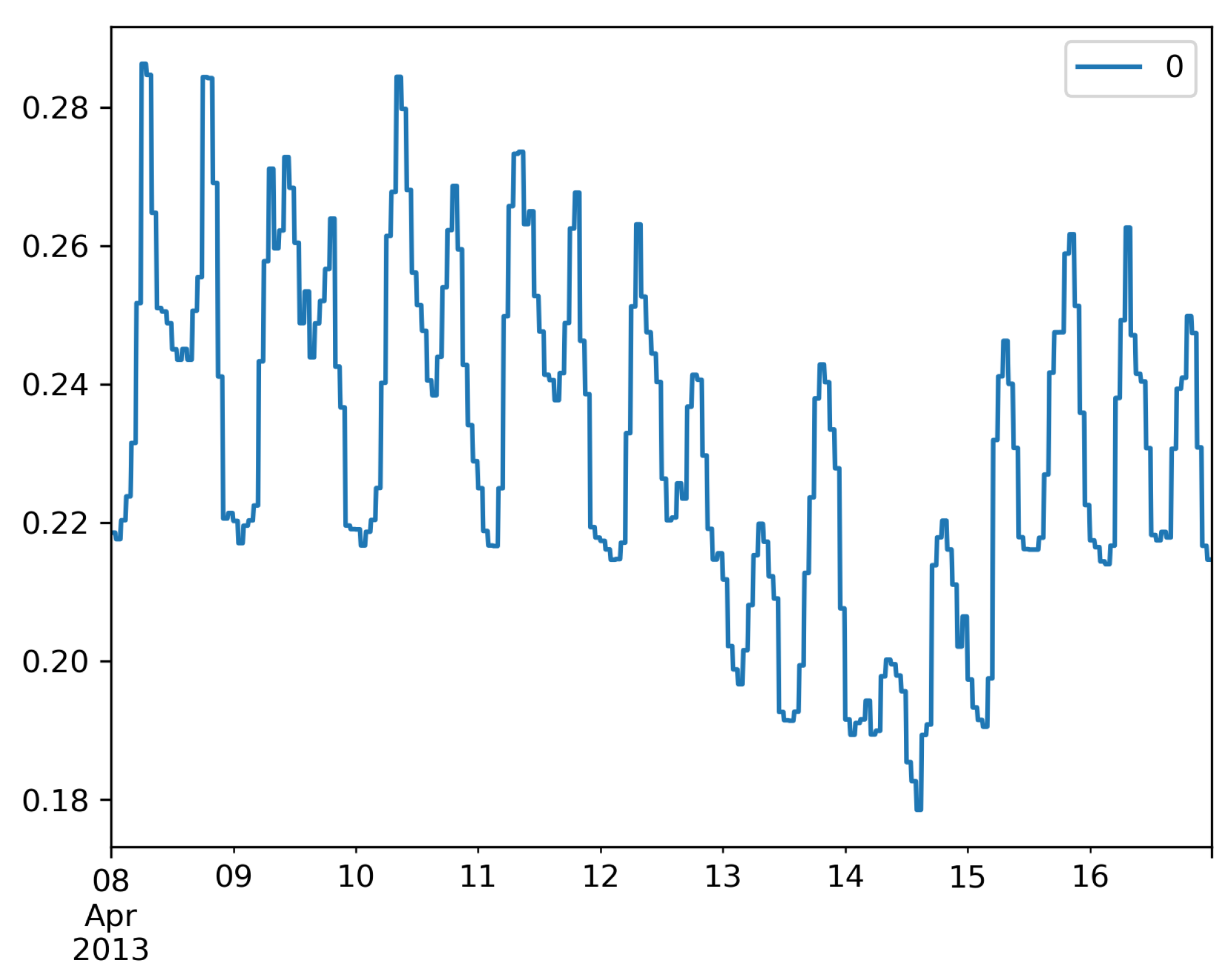
The MPC control is optimized for operational costs, with time-dependent electricity prices assumed. An example is illustrated in
Figure 3. No other feed-in incentives are assumed and are set to zero as in Strategies B and C.
The MPC control strategy remains the same as in Strategy A. However, in this strategy, the placements of the different MESs are randomly chosen to study the effect of clustering.
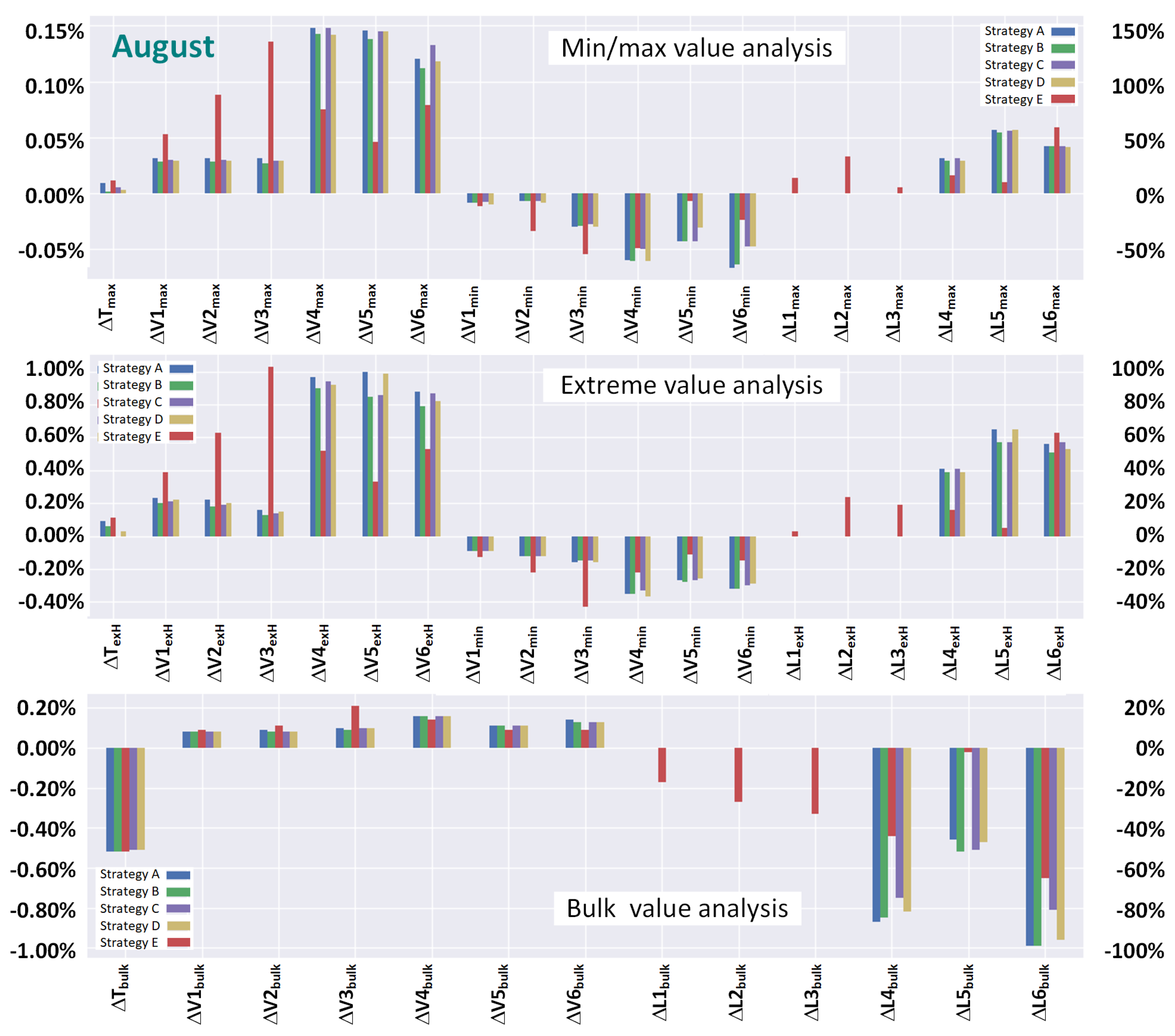
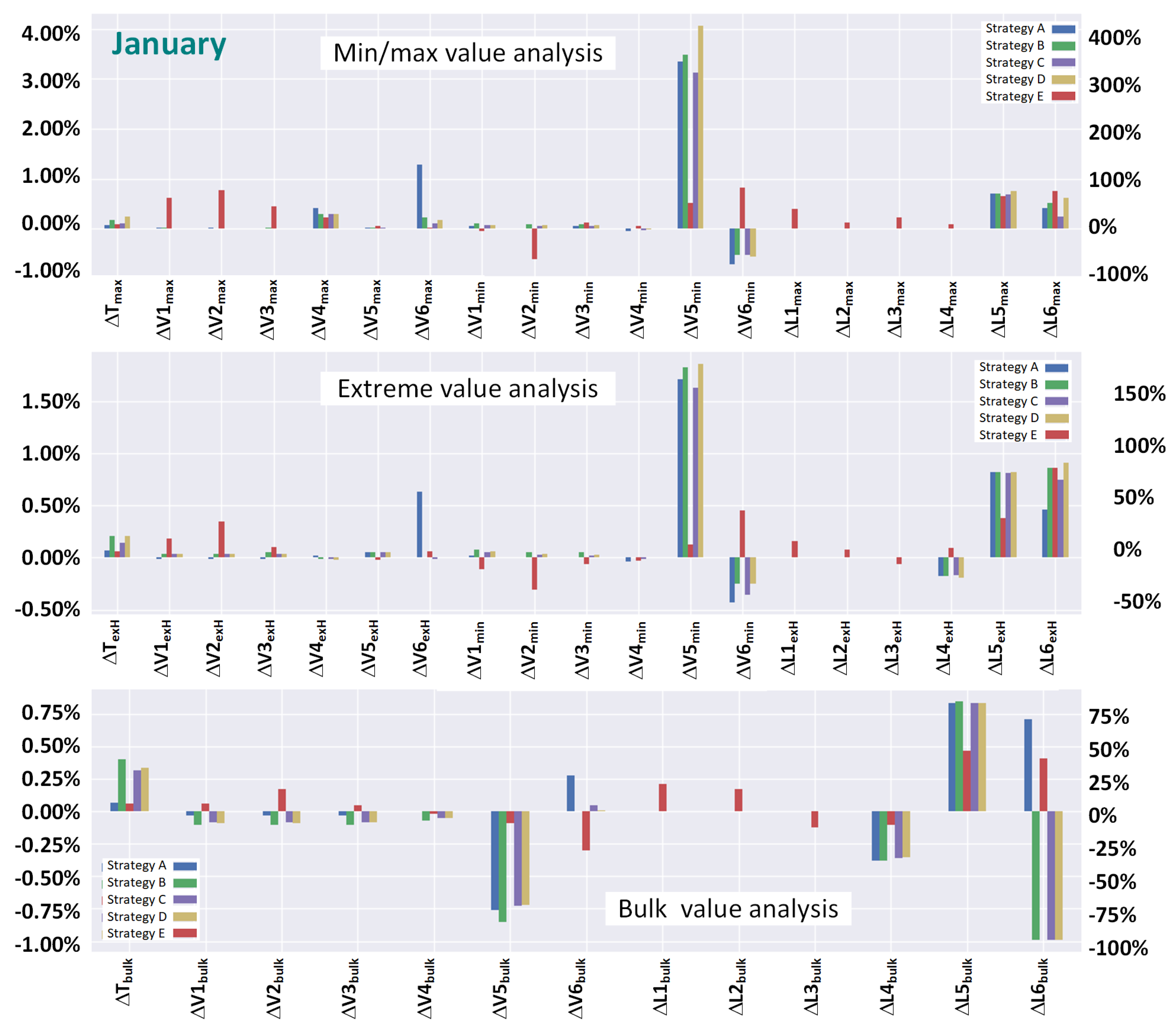
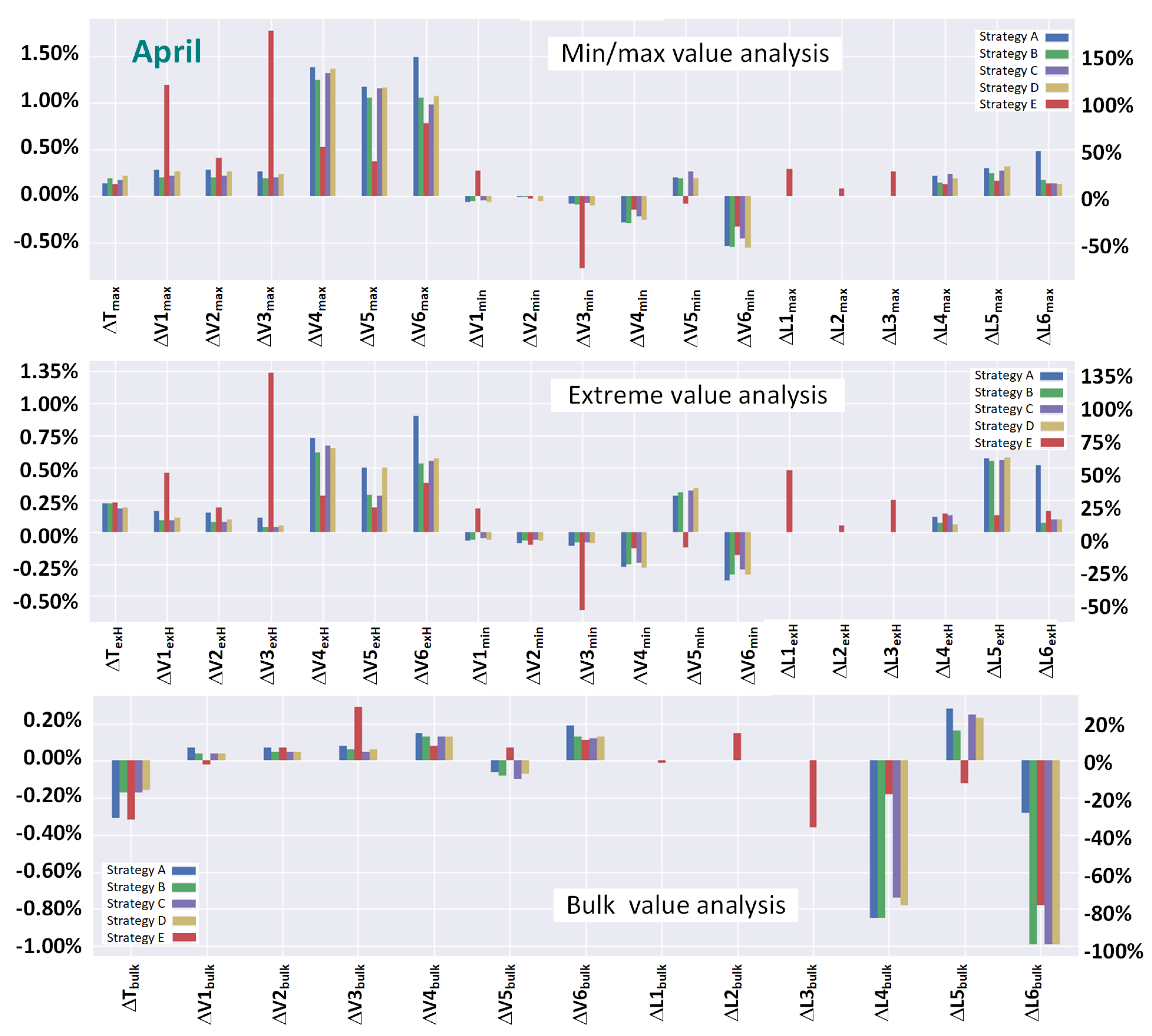
The OptFlex algorithm is utilized to produce the profiles at the MES’s grid connection points. Additionally, key performance indicators can be calculated to characterize the MES’s behavior for the different control strategies. For the studied grid, 12 optimized PV-Battery systems, 7 optimized PV-HP systems, and 4 optimized PV-CHP systems were modeled. The profiles can be computed for different time periods. Calculations up to one year were conducted for single-MES systems. Subsequently, nine days in August, nine days in January, and nine days in April, representing the summer, winter, and transition period seasons, were calculated. This method enables us to study different features and outcomes based on various seasonal effects, which is important since MESs also include heating devices exhibiting temperature-dependent behaviors. The calculations were performed for all five strategies described in the last section.
To gain an understanding of the results from this simulation step, I will showcase only one example for each MES type. I plotted profiles for the transition period, where features such as PV emission and all three energy demands (electrical, space heating, and domestic hot water) are present. In the summer, no space heating is needed, and in the winter, only small amounts of PV emission are present. The presence of all four input time profiles leads to interesting control decisions. The summer and winter period results are shown in the
Appendix B in
Figure A1 and
Figure A2.
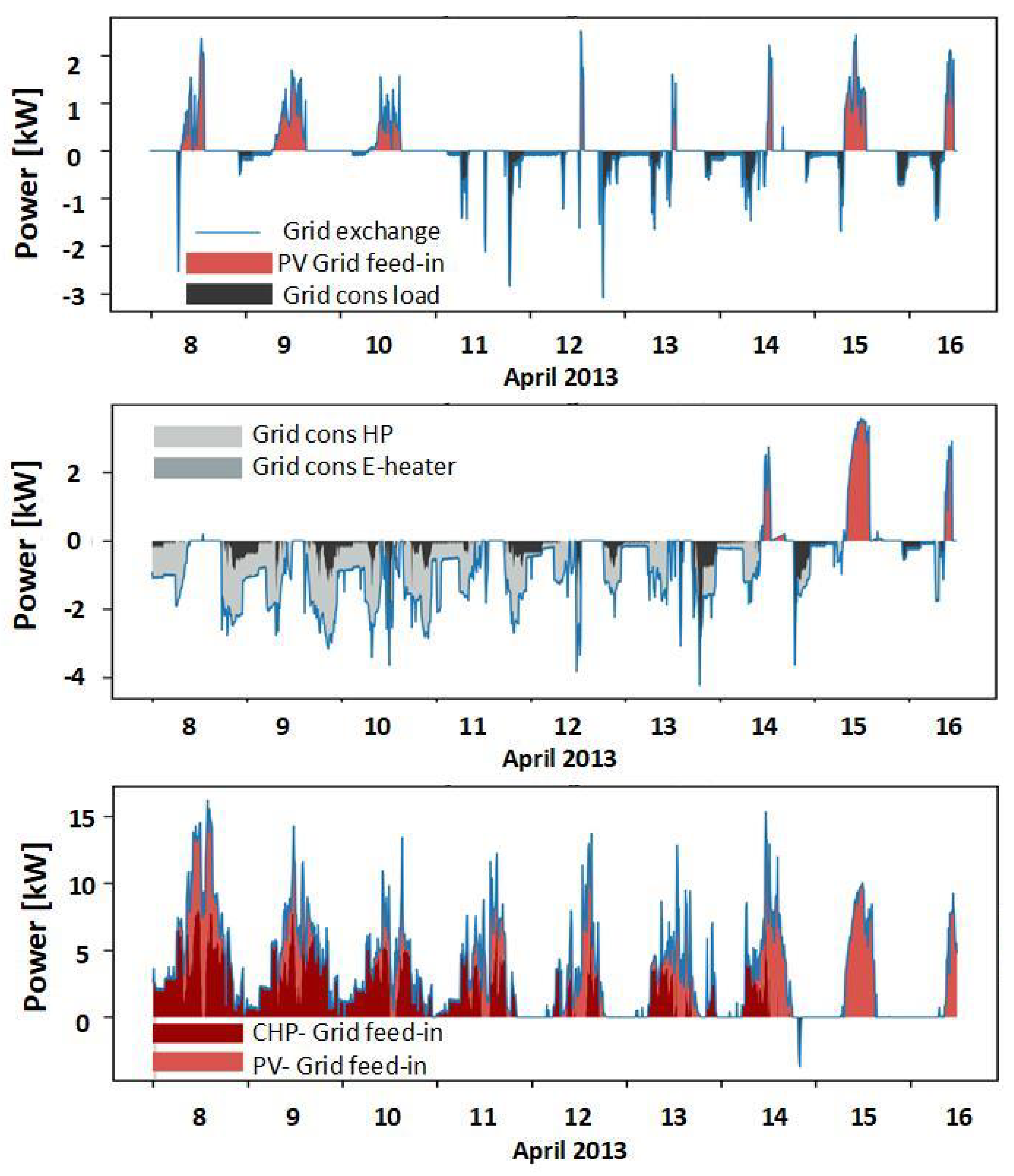
In
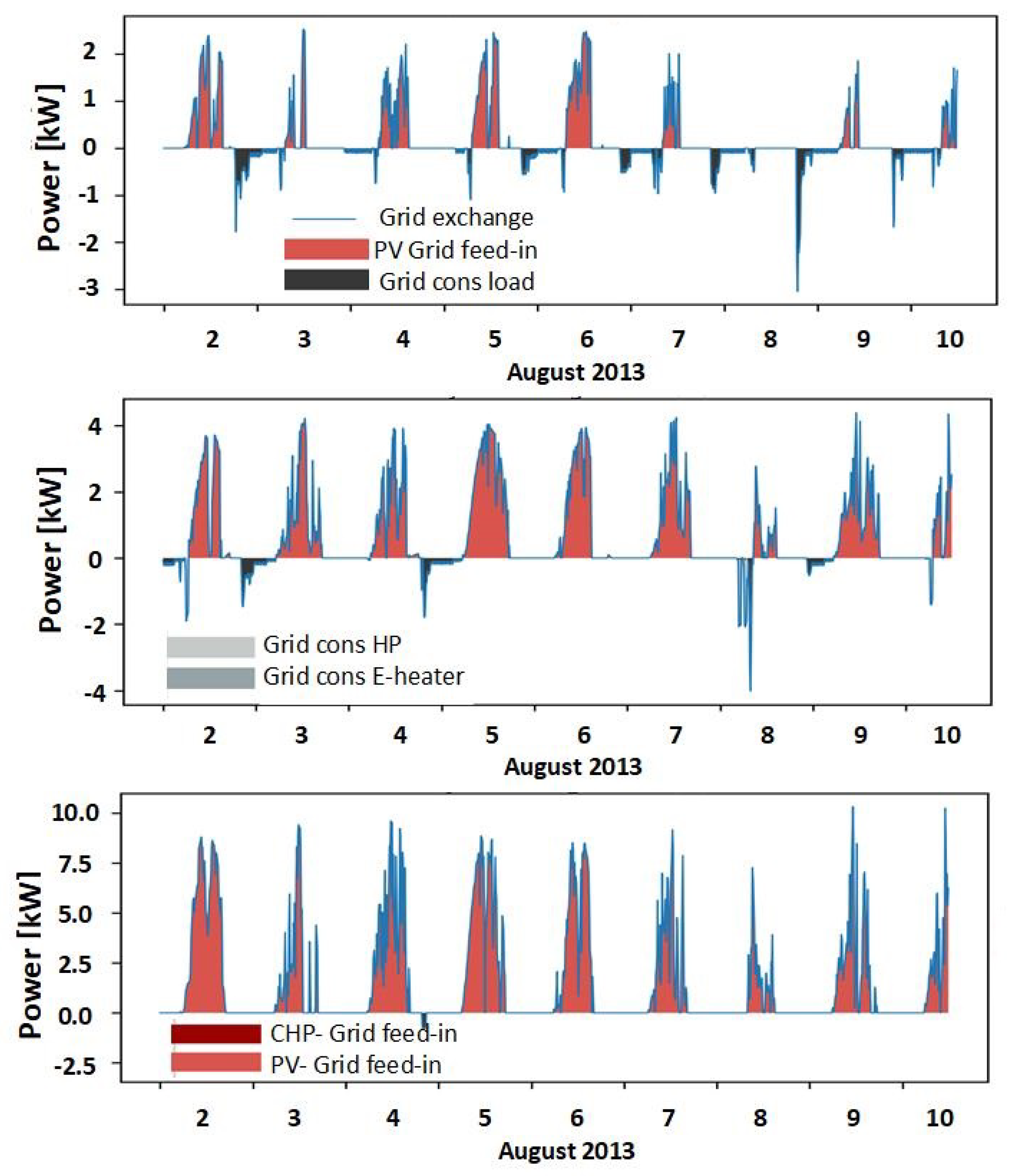
Figure 4, profiles for Strategy A are displayed. The energy fed into the grid is plotted as positive values, while consumed energy is depicted with negative numbers. Each energy system exhibits distinct grid profiles.
The PV-battery system (upper panel) displays the PV-grid feed (light red) and electricity consumption for the household load (black).
The profile of a PV-HP system is characterized by electricity consumption from the grid to meet the demands of the household load (black), HP (light gray), and the electrical heater (dark grey), with a high PV self-consumption rate during the initial 6 days.
The grid profile of the PV-CHP system is dominated by feed-in energy produced by the PV system (light red) and the CHP (dark red).
During the last three days, the PV-battery and PV-HP systems exhibit comparable behaviors. Initially, the battery is discharged to cover the household load, and then energy is drawn from the power grid. As soon as PV energy becomes available, it is used directly for the household load and the HP, while the surplus is stored in the battery. If insufficient PV energy is available, the battery is discharged. When the battery is depleted, grid consumption begins to cover the electrical loads. During these days, as the space-heating demand decreases due to rising outdoor temperatures, the behaviors of the PV-battery and PV-HP systems converge.
In contrast, the PV-CHP system demonstrates a completely different grid profile. No external energy is required from the grid. The CHP energy meets the electrical load, while all PV energy is fed into the grid. As the space-heating demand decreases during the last three days, the CHP operates less frequently, resulting in reduced feed-in energy production. This behavior is attributed to the assumptions of Strategy A, where incentives prioritize feeding PV and CHP energy into the grid.
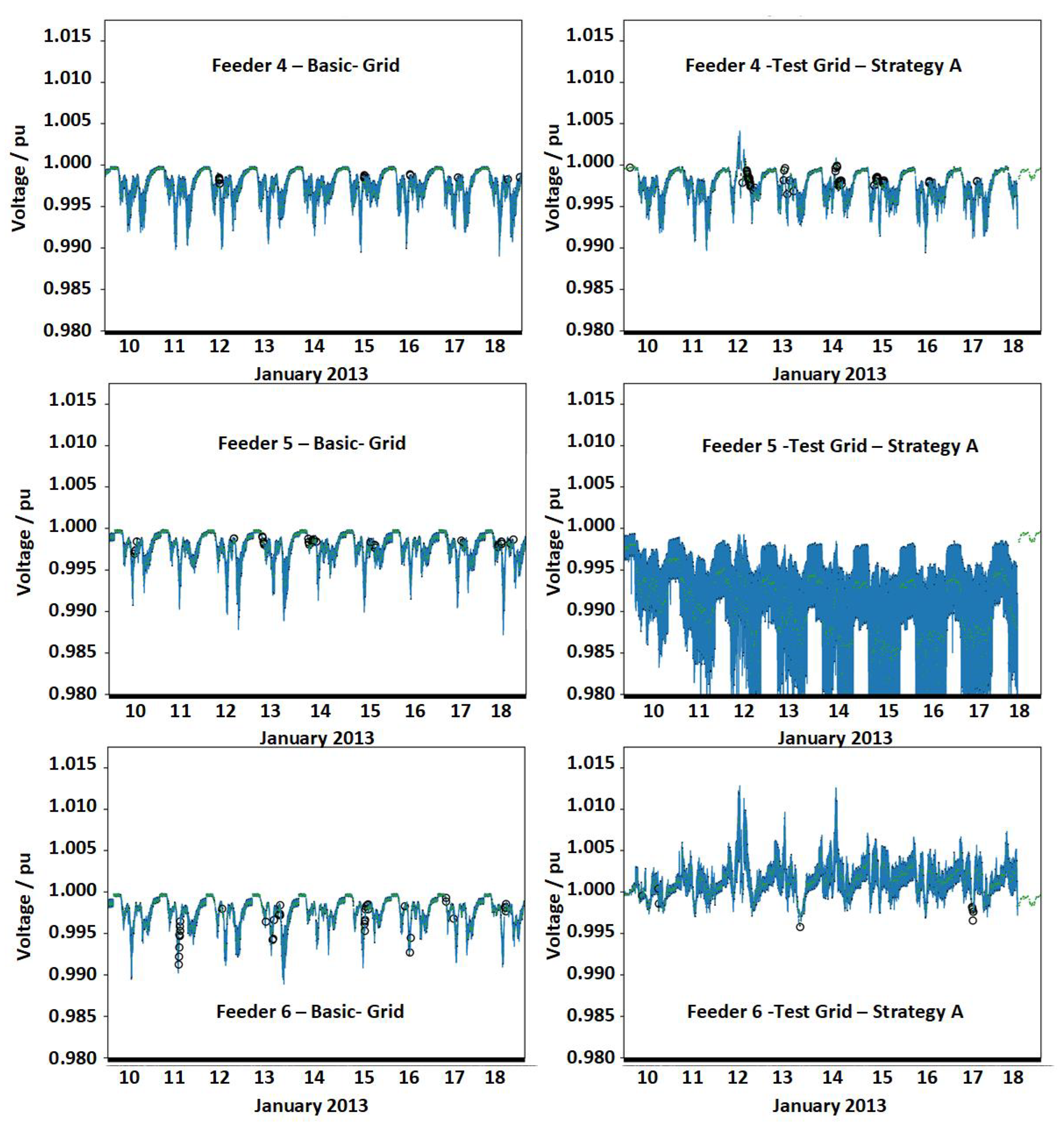
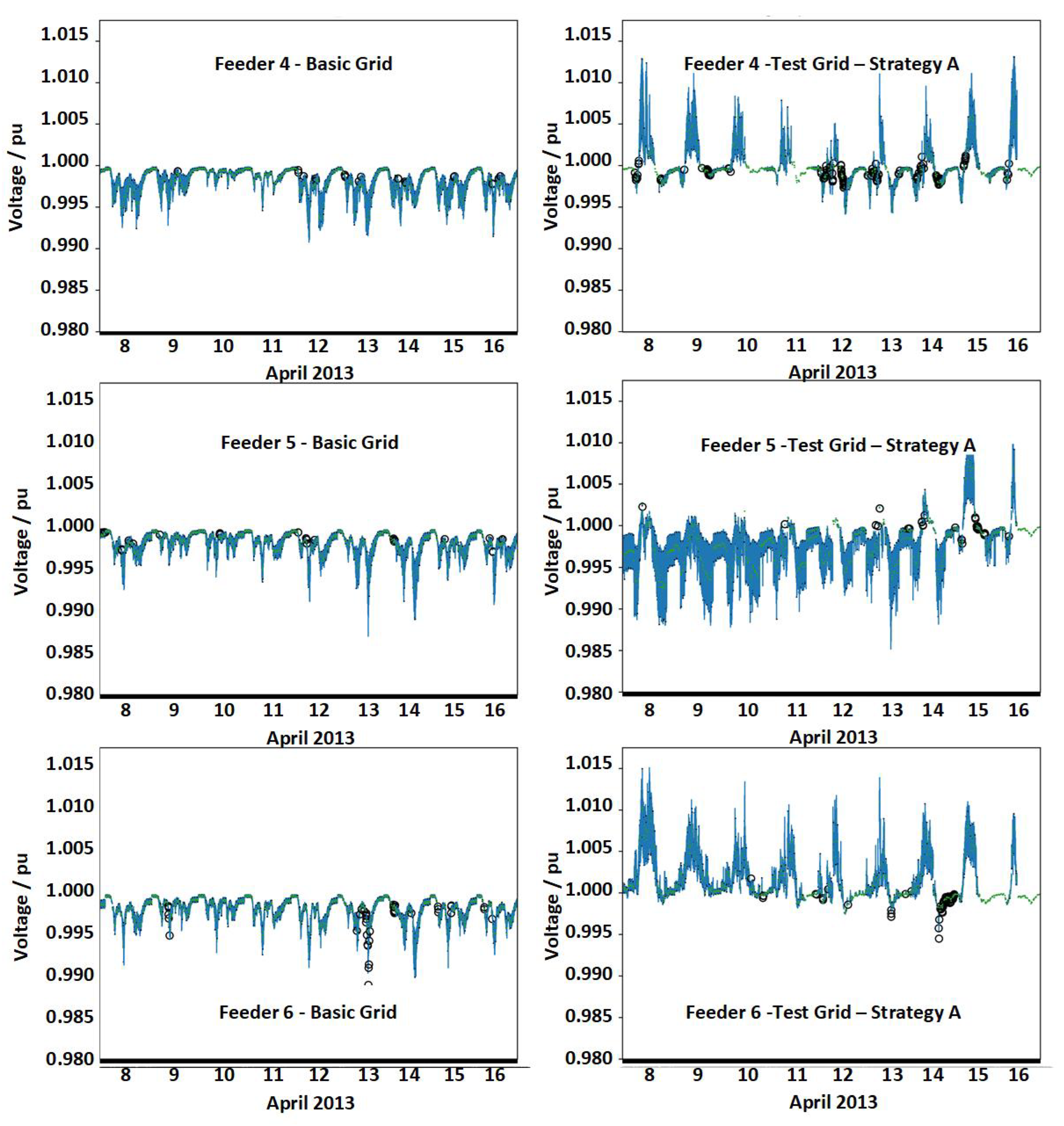
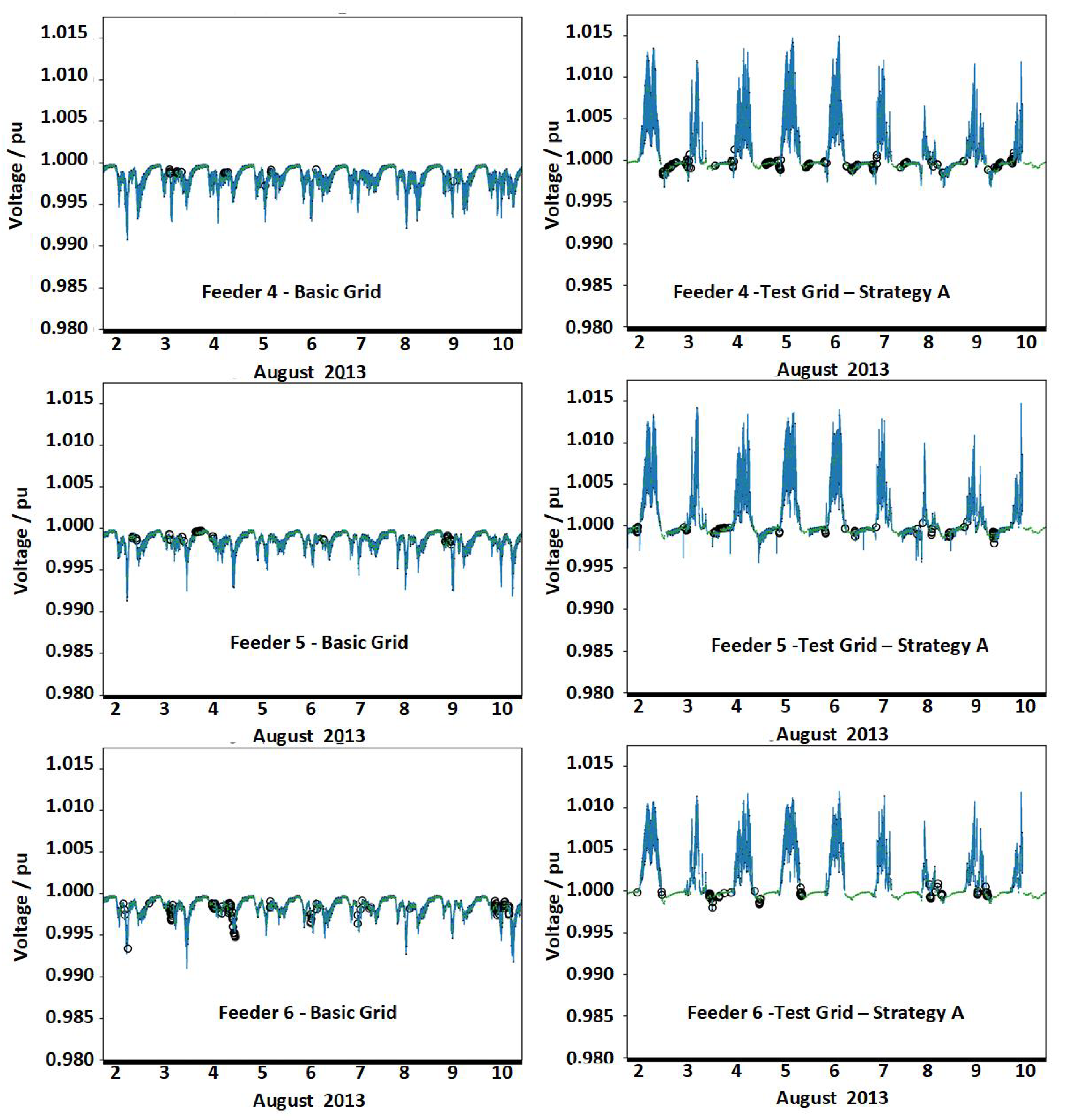
2.3. Grid Simulation (Pandapower)
The distribution network utilized in the analysis was a standardized grid designed specifically for scientific investigation. Known as “Kerber networks,” these grids are derived from the distribution networks featured in the dissertation titled “Capacity of low voltage distribution networks with increased feed-in of photovoltaic power” by Georg Kerber. (For reproducibility, please find the network data on the pandapower homepage:
https://pandapower.readthedocs.io/en/latest/networks/kerber.html#average-kerber-networks, accessed on 21 June 2024) To examine the influence of various MES types, control strategies, and seasonal variations, the following methodology was employed. Initially, a “Basic-Grid” was established using a generic distribution grid. Subsequently, multiple “Test-Grids” were formulated, each incorporating different MES types and control strategies, all based on the same generic distribution grid. The impact of these control strategies and MES types was assessed in comparison to the “Basic-Grid.” It is important to note that the analysis did not extend to evaluating grid violations or planning for grid expansion. Instead, the aim was to identify general impact characteristics utilizing a generic grid model, without delving into specific grid violation analyses, which are heavily reliant on real grid model parameters and assumed grid violation limits.
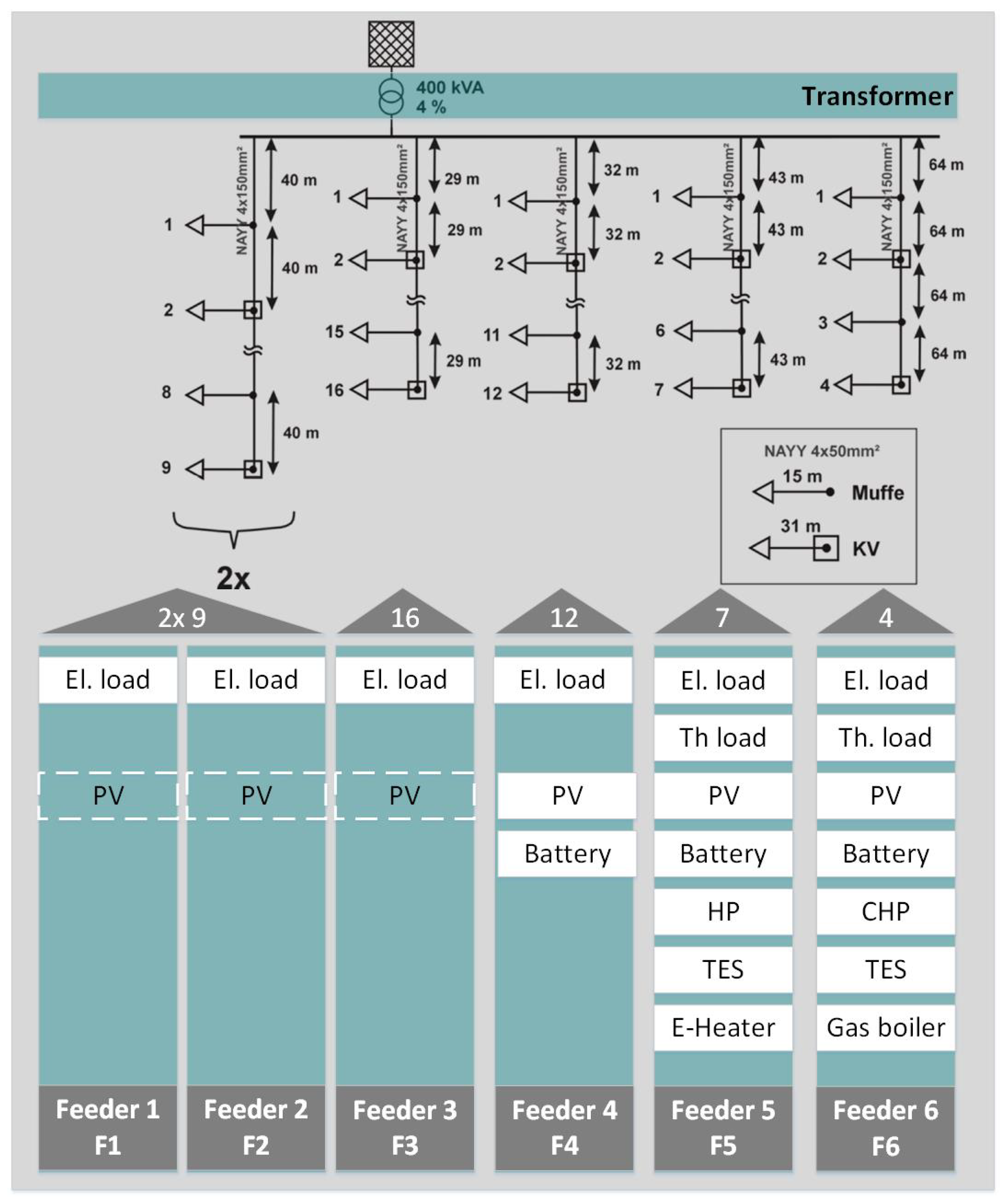
To create a realistic urban environment, I needed to integrate the MES with the load busses of the distribution grid, forming a small section of a generic city. The grid comprises six feeders, with feeder 1 to feeder 3 representing areas where conventional energy systems and decentralized PV are not installed. On the other hand, feeder 4 to feeder 6 represent three distinct types of streets, as depicted in
Figure 5. I assumed that each feeder has similar construction year classes and heating systems. Consequently, one feeder is linked to PV-battery systems, another feeder solely to PV-HP systems, and the remaining feeder exclusively to PV-CHP systems. This approach is aimed at simulating a significant impact on the grid due to the high simultaneity of MESs. Such configurations may mirror real scenarios in distribution grids and cities, where districts and streets often share ownership or are developed with similar energy concepts. Feeders 4–6 were configured as follows:
Feeder 4: “PV-Battery systems”. I have 12 houses equipped with PV-battery systems, each with a separate heat supply, either through oil heating or the gas grid. These houses are predominantly single-family homes. The heat demand for these buildings is not explicitly defined (nd) and was set to a default value.
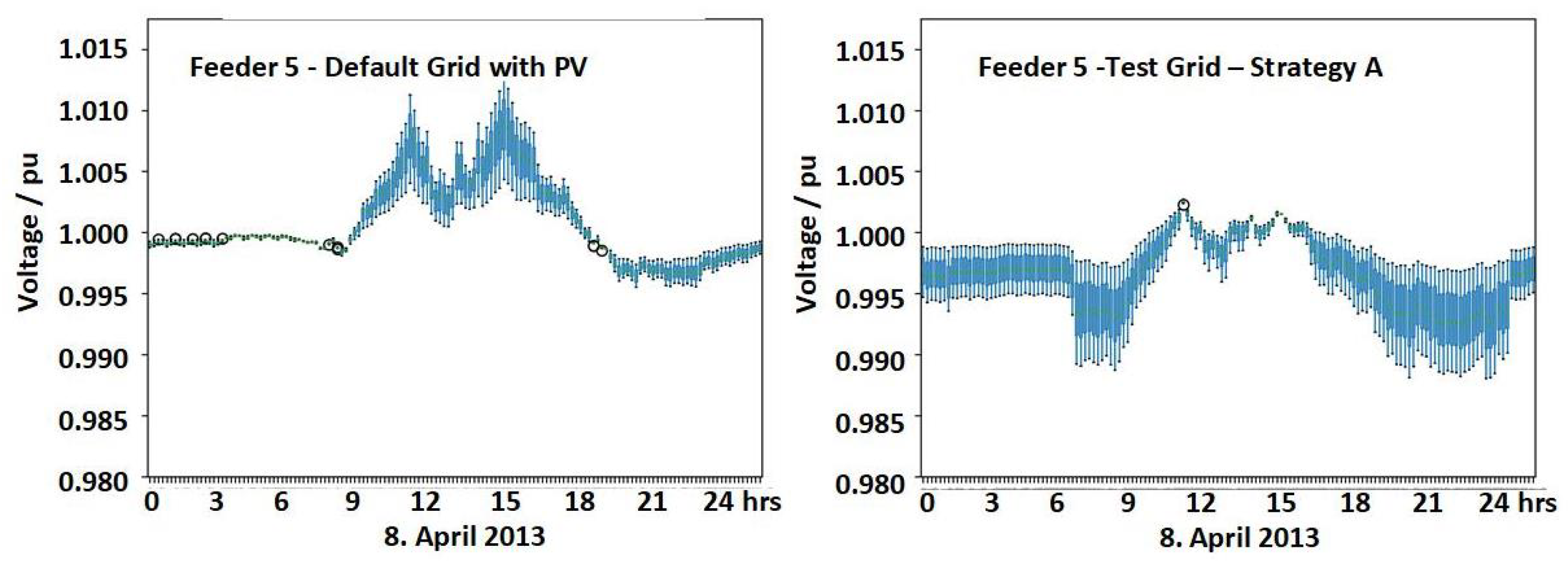
Feeder 5: “PV-HP systems”. There are 7 new homes, primarily single-family dwellings, built in the years 2000, 2005, and 2010. These homes rely on the electrical grid for space heating and domestic hot water.
Feeder 6: “PV-CHP systems”. There are four older multi-family homes where heating demand is solely provided by the gas grid.
The Basic-Grid is defined as the Kerber-grid, which was outfitted with randomly selected electrical load profiles at feeders 1, 2, and 3. The grid loads for feeders 4, 5, and 6 were derived from the electrical load profiles, which served as input in Step 2 for the MES model. It is important to note that the original profiles are used without undergoing processing in Step 2, ensuring that no MES control is assumed. This approach ensures consistency in using the same electrical load profiles employed in the optimized control.
The Test-Grids for Strategies A, B, C, and D maintain the same electrical load profiles for feeders 1, 2, and 3 as those in the Basic-Grid. However, feeders 4, 5, and 6 were furnished with optimized MES profiles, as detailed earlier. Specifically, feeder 4 accommodates 12 (11 single-family homes + 1 multi-family home) PV-battery systems, feeder 5 had 7 (6 single-family homes + 1 multi-family home) PV-HP systems, and feeder 6 hosted 4 (all multi-family homes) PV-CHP systems. The choice of control strategy varies based on the parameters selected in Strategy A through Strategy D.
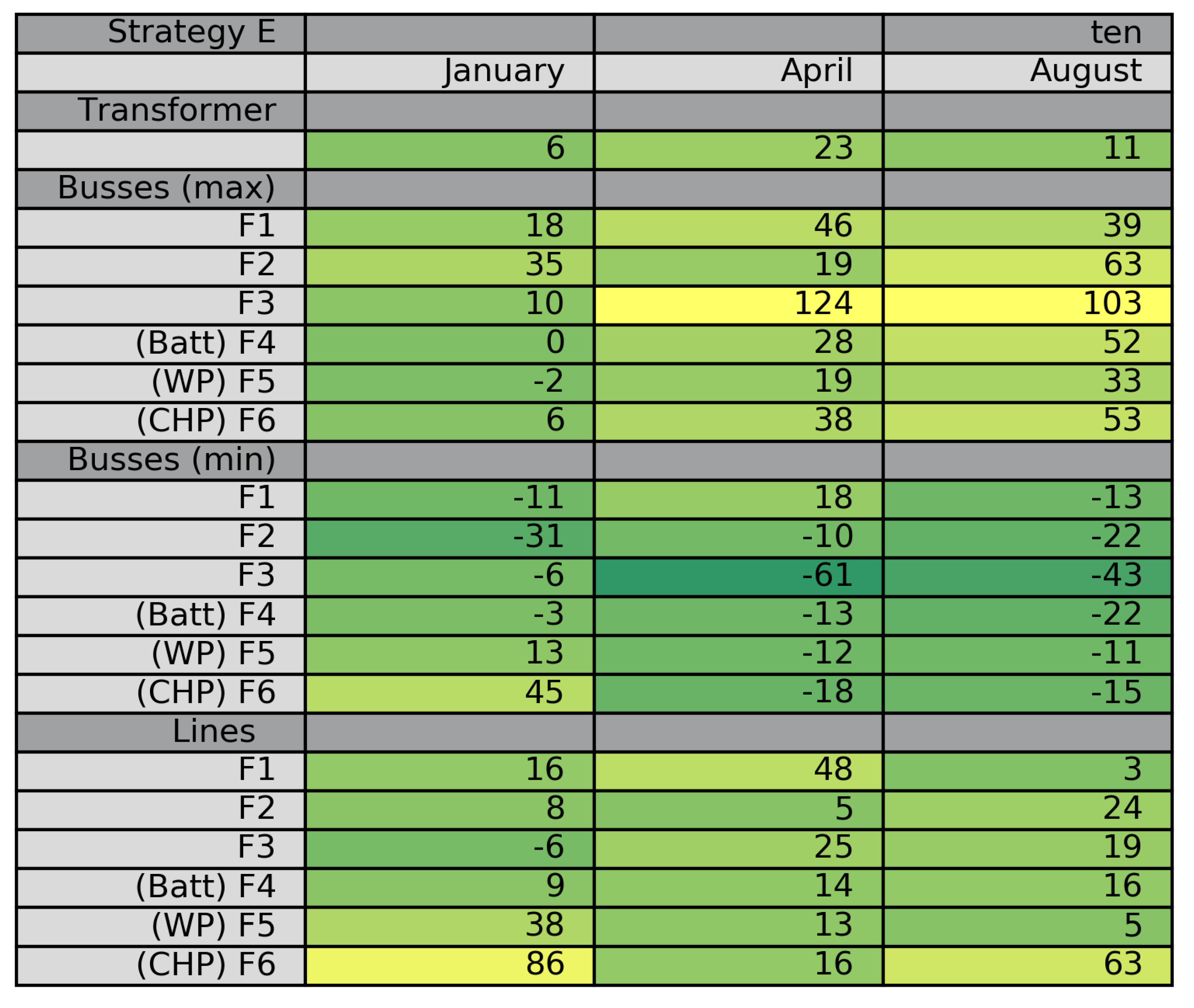
Strategy E diverges from the other strategies in terms of both the Basic-Grid and the Test-Grid configurations. The objective here is to analyze the influence of MES placement within the distribution grid. Consequently, the Basic-Grid mirrors the Test-Grid of Strategy A, featuring feeder-specific MES placement. This setup is then juxtaposed with another Test-Grid where MESs are randomly positioned across all six feeders. In both scenarios, MESs are distributed across all six feeders, allowing them to exert an impact on the distribution grid.
This leads to the following assumptions for the different strategies.
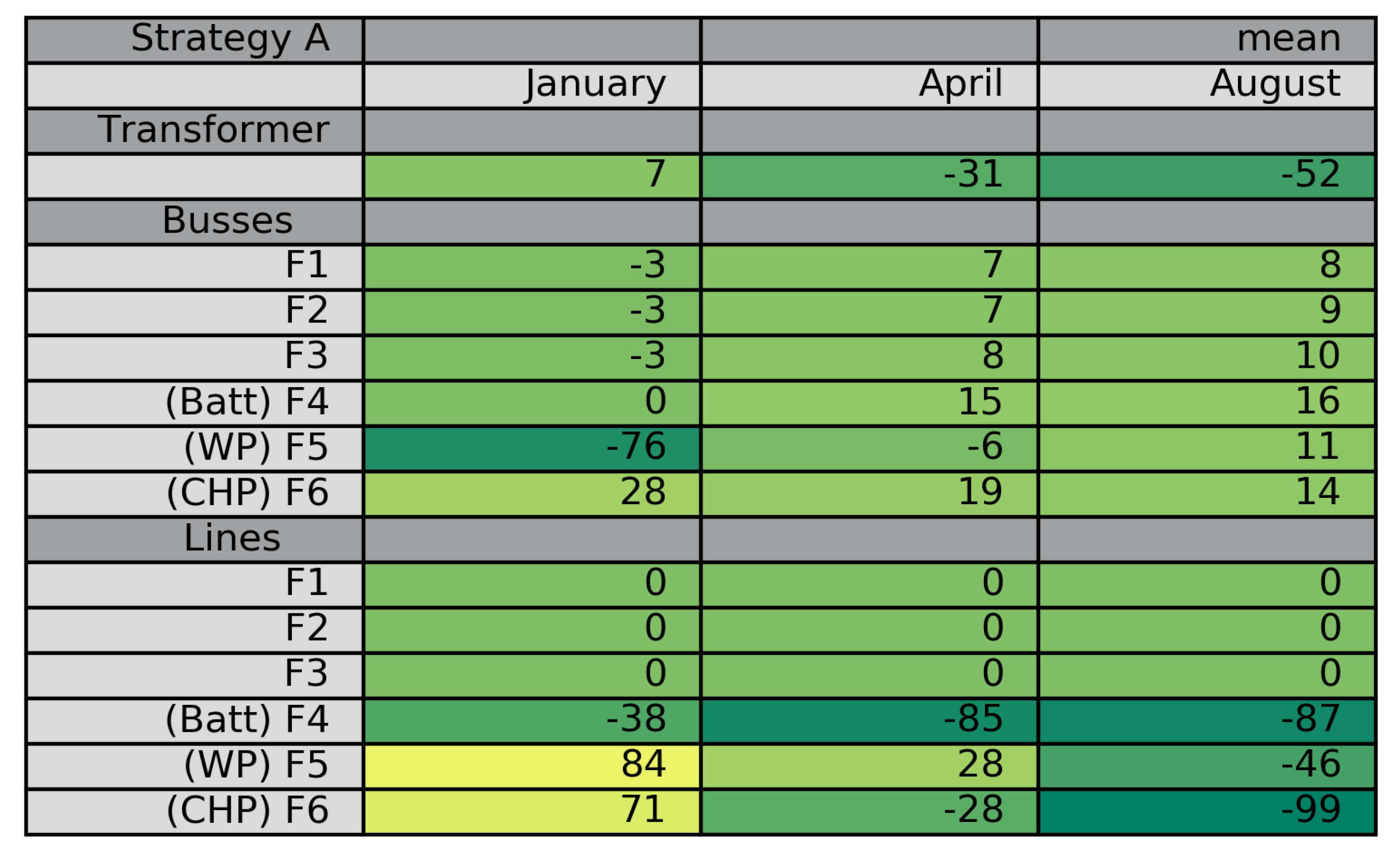
The Basic-Grid is configured as outlined earlier. Random electrical loads are generated for feeder 1, feeder 2, and feeder 3 using an artificial load profile generator based on German household statistics. Meanwhile, the electrical load profiles for feeder 4, feeder 5, and feeder six are assumed to be the same as those used for MES control optimization in Step 2. In Strategy A’s Test-Grid, the focus is on representing the prevailing systems currently in operation, reflecting the feed-in tariffs and incentives for PV and CHP systems in Germany. Control optimization is geared toward minimizing the MES’s operational costs. A perfect forecast is employed as the forecast method, ensuring no discrepancies between forecast PV production and energy consumption and the actual values.
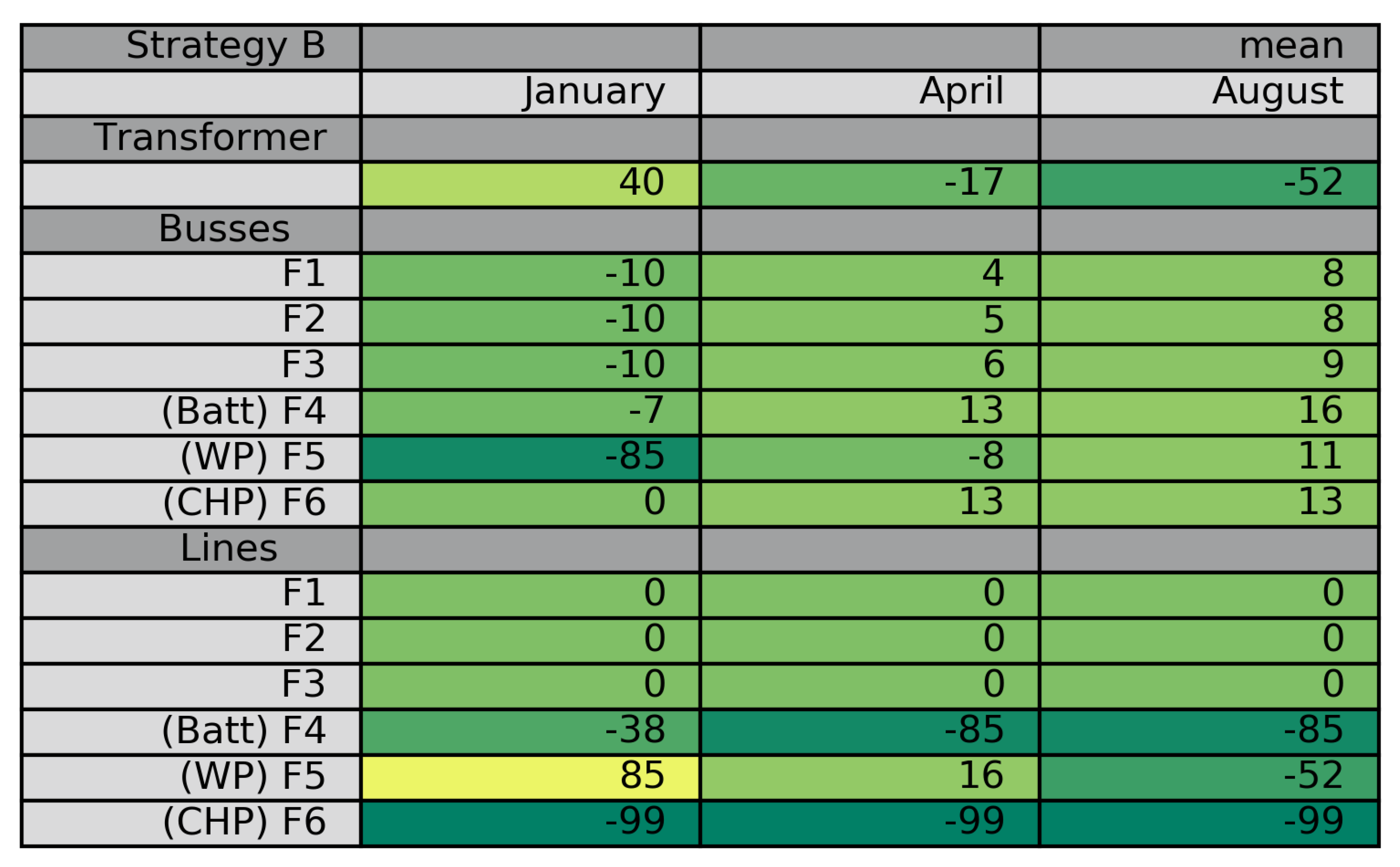
The Basic-Grid configuration remains consistent with Strategy A. In contrast, the Test-Grid is equipped with MESs operating without feed-in tariff contracts for energy produced by the PV and CHP systems. The control strategy is aimed at minimizing the operational costs of the multi-energy system, and the forecast method selected is perfect forecast, ensuring no discrepancies between forecasted PV production and energy consumption values and their actual counterparts.
The Basic-Grid configuration remains consistent with Strategy A. Conversely, the Test-Grid is equipped with MESs devoid of feed-in tariff contracts for energy produced by the PV and CHP systems. The control strategy is optimized for minimal CO2 emission, and the forecast method selected is perfect forecast, ensuring no discrepancies between forecasted PV production and energy consumption values and their real counterparts.
The Basic-Grid configuration mirrors that of Strategy A. Conversely, the Test-Grid is outfitted with MESs lacking feed-in tariff contracts for energy produced by the PV and CHP systems. Instead, they receive a variable electricity price determined by a third party, such as the energy provider or a virtual power plant. The control strategy remains optimized for the operational costs of the multi-energy system, with a perfect forecast method chosen to ensure no disparities between forecasted PV production and energy consumption values and their actual counterparts.
The Basic-Grid configuration is identical to the Test-Grid of Strategy A. However, in the Test-Grid, the placements of the MESs are randomized. All 23 consumers, including the MES, can be located at any bus within the grid.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}