
SIDGAN: Efficient Multi-Module Architecture for Single Image Defocus Deblurring


Abstract
1. Introduction
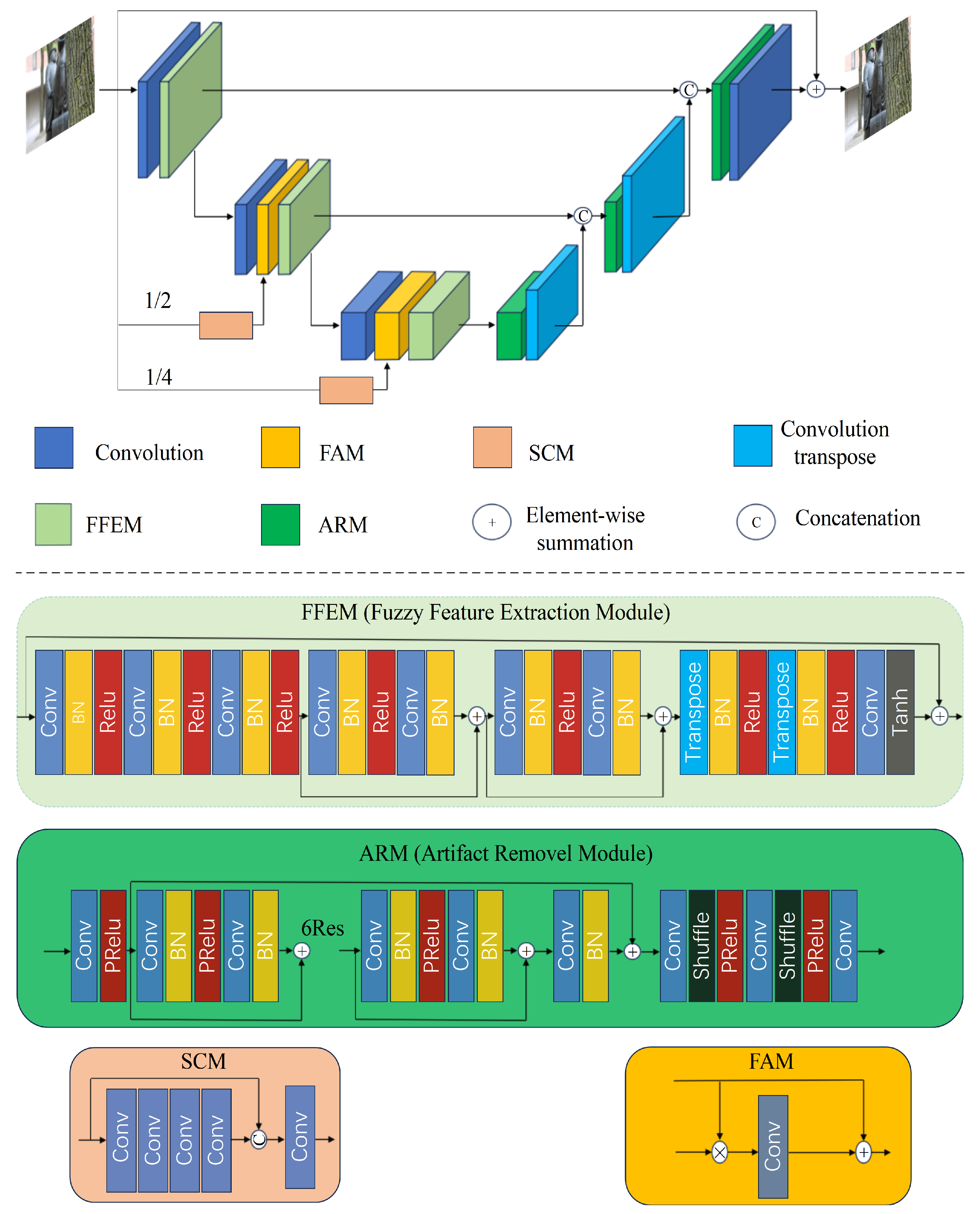
- Firstly, we present the Artifact Removal Module (ARM) that contributes to the removal of artifacts during decoding in the field of single image defocus deblurring. The design of the ARM addresses the artifact problem in defocus deblurring, which provides a new solution for improving image quality.
- Secondly, we propose the Fuzzy Feature Extraction Module (FFEM) that is conducive to enhancing the encoder’s ability to extract features from the defocused image with large blurry regions. The design of the FFEM focuses on the effectiveness and robustness of feature extraction, which provides an effective means for improvement in image quality.
- Finally, a novel algorithm for single image defocus deblurring is proposed and carefully designed. Qualitative and quantitative experiments demonstrate that the proposed method surpasses the state-of-the-art methods in image quality.
2. Related Works
2.1. Existing Approaches for Defocus Deblurring
2.2. Defocus Deblurring Datasets
2.3. Generative Adversarial Networks
2.4. Conditional Adversarial Networks
3. Proposed Method
3.1. The Details of SIDGAN
3.2. Loss Function
4. Experiments
4.1. Experimental Details
4.2. Experimental Results
4.2.1. Evaluation Experiments on the DPDD Dataset
4.2.2. Evaluation Experiments on the RealDOF Dataset
5. Ablation Studies
5.1. Ablation Studies on the DPDD Dataset
5.2. Ablation Studies on the RealDOF Dataset
6. Limitations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ARM | Artifact Removal Module |
| AiF | All-in-focus |
| BAMBNet | Blur-Aware Multi-Branch Network |
| CVPR | Conference on Computer Vision and Pattern Recognition |
| DOF | Depth of Field |
| DPDD | Dual-Pixel Defocus Deblurring |
| DP | Dual-Pixel |
| DMENet | Defocus Map Estimation Network |
| DBD | Defocus Blur Detection |
| DRBNet | Dynamic Residual Block Network |
| DPDNet | Dual-Pixel Deblurring Network |
| DDDNet | Dual-Pixel-Based Depth and Deblur Network |
| DNN | Deep Neural Network |
| EBDB | Edge-Based Defocus Blur |
| FFEM | Fuzzy Feature Extraction Module |
| FAM | Feature Attention Module |
| FocalNet | Focal Network |
| FADA | Focused Area Detection Attack |
| GANs | Generative Adversarial Networks |
| GRL | Global, Regional, and Local |
| GKM | Gaussian Kernel Mixture |
| IFAN | Interactive Filter Adaptive Network |
| ICML | International Conference on Machine Learning |
| iDFD | Indoor Depth from Defocus |
| ICCV | International Conference on Computer Vision |
| JDRL | Joint Deblurring And Reblurring Learning |
| JS divergence | Jensen–Shannon divergence |
| JNB | Just Noticeable Blur |
| KPAC | Kernel-Sharing Parallel Atrous Convolutional |
| MAE | Mean Absolute Error |
| MRNet | Multi-Refinement Network |
| MDPNet | Multi-Task Dual-Pixel Network |
| MPRNet | Multi-Path Residual Network |
| MSE | Mean Square Error |
| PSNR | Peak Signal-to-Noise Ratio |
| RealDOF | Real Depth of Field |
| RDPD | Recurrent Dual-Pixel Deblurring |
| SIDD | Single Image Defocus Deblurring |
| SIDGAN | Single Image Deblurring Generative Adversarial Networks |
| SCM | Shallow Convolutional Module |
| SSIM | Structural Similarity Index |
| SDD | Single-Image Defocus Deblurring |
| VGG19 | Visual Geometry Group 19 |
| WGAN-GP | Wasserstein Generative Adversarial Network With Gradient Penalty |
References
- Son, H.; Lee, J.; Cho, S.; Lee, S. Single Image Defocus Deblurring Using Kernel-Sharing Parallel Atrous Convolutions. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021; pp. 2622–2630. [Google Scholar]
- Tai, Y.W.; Brown, M. Single image defocus map estimation using local contrast prior. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 22–25 September 2009; pp. 1797–1800. [Google Scholar]
- Zhuo, S.J.; Sim, T. Defocus map estimation from a single image. Pattern Recognit. 2021, 44, 1852–1858. [Google Scholar] [CrossRef]
- Karaali, A.; Jung, C.R. Edge-Based Defocus Blur Estimation with Adaptive Scale Selection. IEEE Trans. Image Process. 2018, 3, 1126–1137. [Google Scholar] [CrossRef]
- Cho, S.; Lee, S. Convergence Analysis of MAP Based Blur Kernel Estimation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 4818–4826. [Google Scholar]
- Fish, D.; Brinicombe, A.M.; Pike, E.R.; Walker, J.G. Blind deconvolution by means of the Richardson–Lucy algorithm. JOSA A 1995, 12, 58–65. [Google Scholar] [CrossRef]
- Levin, A.; Fergus, R.; Durand, F.; Freeman, W. Image and depth from a conventional camera with a coded aperture. Acm Trans. Graph. (Tog) 2007, 27, 70-es. [Google Scholar] [CrossRef]
- Krishnan, D.; Fergus, R. Fast image deconvolution using hyper-Laplacian priors. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 7–10 December 2009; pp. 1033–1041. [Google Scholar]
- Bando, Y.; Nishita, T. Towards Digital Refocusing from a Single Photograph. In Proceedings of the 15th Pacific Conference on Computer Graphics and Applications (PG’07), Maui, HI, USA, 29 October–2 November 2007; pp. 363–372. [Google Scholar]
- Shi, J.P.; Xu, L.; Jia, J.Y. Just noticeable defocus blur detection and estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 657–665. [Google Scholar]
- Park, J.; Tai, Y.W.; Cho, D.; Kweon, I. A Unified Approach of Multi-scale Deep and Hand-Crafted Features for Defocus Estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 21–26 July 2017; pp. 2760–2769. [Google Scholar]
- Xu, G.D.; Quan, Y.H.; Ji, H. Estimating Defocus Blur via Rank of Local Patches. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5381–5389. [Google Scholar]
- D’Andres, L.; Salvador, J.; Kochale, A.; Süsstrunk, S. Non-Parametric Blur Map Regression for Depth of Field Extension. IEEE Trans. Image Process. 2016, 25, 1660–1673. [Google Scholar] [CrossRef]
- Liu, Y.Q.; Du, X.; Shen, H.L.; Chen, S.J. Estimating Generalized Gaussian Blur Kernels for Out-of-Focus Image Deblurring. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 829–843. [Google Scholar] [CrossRef]
- Goilkar, S.; Yadav, D.M. Implementation of Blind and Non-blind Deconvolution for Restoration of Defocused Image. In Proceedings of the International Conference on Emerging Smart Computing and Informatics (ESCI), Pune, India, 19–22 August 2021; pp. 560–563. [Google Scholar]
- Chan, S.; Nguyen, T. Single image spatially variant out-of-focus blur removal. In Proceedings of the IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 677–680. [Google Scholar]
- Abuolaim, A.; Brown, M. Defocus deblurring using dual-pixel data. In Proceedings of the European Conference on Computer Vision, Online, 22–28 August 2020; pp. 111–126. [Google Scholar]
- Lee, J.; Lee, S.; Cho, S.; Lee, S. Deep Defocus Map Estimation Using Domain Adaptation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 12214–12222. [Google Scholar]
- Lee, J.; Son, H.; Rim, J.; Cho, S.; Lee, S. Iterative Filter Adaptive Network for Single Image Defocus Deblurring. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Online, 19–25 June 2021; pp. 2034–2042. [Google Scholar]
- Abuolaim, A.; Afifi, M.; Brown, M. Improving Single-Image Defocus Deblurring: How Dual-Pixel Images Help Through Multi-Task Learning. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2022; pp. 82–90. [Google Scholar]
- Zhao, W.D.; Wei, F.; He, Y.; Lu, H.C. United Defocus Blur Detection and Deblurring via Adversarial Promoting Learning. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; pp. 569–586. [Google Scholar]
- Quan, Y.H.; Yao, X.; Ji, H. Single Image Defocus Deblurring via Implicit Neural Inverse Kernels. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Paris, France, 2–6 October 2023; pp. 12566–12576. [Google Scholar]
- Zhang, A.; Sun, J. Joint Depth and Defocus Estimation From a Single Image Using Physical Consistency. IEEE Trans. Image Process. 2021, 30, 3419–3433. [Google Scholar] [CrossRef]
- Anwar, S.; Hayder, Z.; Porikli, F.M. Deblur and deep depth from single defocus image. Mach. Vis. Appl. 2021, 32, 1–13. [Google Scholar] [CrossRef]
- Karaali, A.; Harte, N.; Jung, C.R. Deep Multi-Scale Feature Learning for Defocus Blur Estimation. IEEE Trans. Image Process. 2022, 31, 1097–1106. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, L.Y.; Liu, L.; Liu, M.M. K3DN: Disparity-Aware Kernel Estimation for Dual-Pixel Defocus Deblurring. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 18–22 June 2023; pp. 13263–13272. [Google Scholar]
- Quan, Y.H.; Wu, Z.C.; Ji, H. Neumann Network with Recursive Kernels for Single Image Defocus Deblurring. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 18–22 June 2023; pp. 5754–5763. [Google Scholar]
- Li, Y.W.; Fan, Y.C.; Xiang, X.Y.; Demandolx, D.; Ranjan, R.; Timofte, R.; Gool, L.V. Efficient and explicit modelling of image hierarchies for image restoration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 18–22 June 2023; pp. 18278–18289. [Google Scholar]
- Ye, Q.; Suganuma, M.; Okatani, T. Accurate Single-Image Defocus Deblurring Based on Improved Integration with Defocus Map Estimation. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Kuala Lumpur, Malaysia, 8–11 October 2023; pp. 750–754. [Google Scholar]
- Zhao, W.; Hu, G.; Wei, F.; Wang, H.P.; He, Y.; Lu, H.C. Attacking Defocus Detection With Blur-Aware Transformation for Defocus Deblurring. IEEE Trans. Multimed. 2024, 26, 5450–5460. [Google Scholar] [CrossRef]
- Ali, K.; Jung, C.R. SVBR-Net: A Non-Blind Spatially Varying Defocus Blur Removal Network. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 566–570. [Google Scholar]
- Zhang, D.; Wang, X.B. Dynamic Multi-Scale Network for Dual-Pixel Images Defocus Deblurring with Transformer. In Proceedings of the IEEE International Conference on Multimedia and Expo (ICME), Taipei, Taiwan, 18–22 July 2022; pp. 1–6. [Google Scholar]
- Saqib, N.; Lorenzo, V.; Manuel, M.; Victor, M.B.; Daniela, C. 2HDED:Net for Joint Depth Estimation and Image Deblurring from a Single Out-of-Focus Image. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 2006–2010. [Google Scholar]
- Nazir, S.; Qiu, Z.Y.; Coltuc, D.; Martínez-Sánchez, J.; Arias, P. iDFD: A Dataset Annotated for Depth and Defocus. In Proceedings of the Scandinavian Conference on Image Analysis, Sirkka, Finland, 18–21 April 2023; pp. 67–83. [Google Scholar]
- Mazilu, I.; Wang, S.; Dummer, S.; Veldhuis, R.; Brune, C.; Strisciuglio, N. Defocus Blur Synthesis and Deblurring via Interpolation and Extrapolation in Latent Space. arXiv 2023, arXiv:2307.15461. [Google Scholar]
- Zhao, Z.J.; Yang, H.; Liu, P.; Nie, H.; Zhang, Z.; Li, C. Defocus blur detection via adaptive cross-level feature fusion and refinement. Vis. Comput. 2024, 1432–2315. [Google Scholar] [CrossRef]
- Zhang, K.H.; Ren, W.; Luo, W.; Lai, W.S.; Stenger, B.; Yang, M.H.; Li, H.D. Deep Image Deblurring: A Survey. Int. J. Comput. Vis. 2022, 130, 2103–2130. [Google Scholar] [CrossRef]
- Chai, S.; Zhao, X.; Zhang, J.; Kan, J. Defocus blur detection based on transformer and complementary residual learning. Multimed. Tools Appl. 2023, 83, 53095–53118. [Google Scholar] [CrossRef]
- Galetto, F.; Deng, G. Single image defocus map estimation through patch blurriness classification and its applications. Vis. Comput. 2022, 39, 4555–4571. [Google Scholar] [CrossRef]
- Zhang, N.; Yan, J.C. Rethinking the Defocus Blur Detection Problem and a Real-Time Deep DBD Model. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 22–28 August 2020; pp. 617–632. [Google Scholar]
- Lin, X.; Suo, J.L.; Cao, X.; Dai, Q.H. Iterative Feedback Estimation of Depth and Radiance from Defocused Images. In Proceedings of the Asian Conference on Computer Vision, Singapore, 20–23 May 2012; pp. 95–109. [Google Scholar]
- Quan, Y.H.; Wu, Z.C.; Cao, X.; Ji, H. Gaussian Kernel Mixture Network for Single Image Defocus Deblurring. Adv. Neural Inf. Process. Syst. 2021, 34, 20812–20824. [Google Scholar]
- Zhang, D.F.; Wang, X.B.; Jin, Z.Z. MRNET: Multi-Refinement Network for Dual-Pixel Images Defocus Deblurring. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–9 June 2023; pp. 1–5. [Google Scholar]
- Jung, S.H.; Heo, Y.S. Disparity probability volume guided defocus deblurring using dual pixel data. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October 2021; pp. 305–308. [Google Scholar]
- Zhai, J.C.; Liu, Y.; Zeng, P.C.; Ma, C.H.; Wang, X.; Zhao, Y. Efficient Fusion of Depth Information for Defocus Deblurring. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Republic of Korea, 14–19 April 2024; pp. 2640–2644. [Google Scholar]
- Ma, H.Y.; Liu, S.J.; Liao, Q.M.; Zhang, J.C.; Xue, J.H. Defocus Image Deblurring Network With Defocus Map Estimation as Auxiliary Task. IEEE Trans. Image Process. 2021, 31, 216–226. [Google Scholar] [CrossRef]
- Ruan, L.Y.; Chen, B.; Li, J.; Lam, M.L. AIFNet: All-in-Focus Image Restoration Network Using a Light Field-Based Dataset. IEEE Trans. Comput. Imaging 2021, 7, 675–688. [Google Scholar] [CrossRef]
- Shi, J.P.; Xu, L.; Jia, J.Y. Discriminative Blur Detection Features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2965–2972. [Google Scholar]
- Li, Y.; Ren, D.; Shu, X.; Zuo, W. Learning Single Image Defocus Deblurring with Misaligned Training Pairs. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 7–14 February 2023; pp. 1495–1503. [Google Scholar]
- Ian, G.; Jean, P.; Mehdi, M.; Bing, X.; David, W.F.; Sherjil, O.; Aaron, C.; Yoshua, B. Generative adversarial nets. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Tim, S.; Ian, G.; Wojciech, Z.; Vicki, C.; Alec, R.; Xi, C.; Xi, C. Improved Techniques for Training GANs. In Proceedings of the International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 2234–2242. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein Generative Adversarial Networks. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 214–223. [Google Scholar]
- Gulrajani, I.; Ahmed, F.; Arjovsky, M.; Dumoulin, V.; Courville, A. Improved Training of Wasserstein GANs. In Proceedings of the International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5769–5779. [Google Scholar]
- Yang, F.Z.; Yang, H.; Fu, J.L.; Lu, H.T.; Guo, B.N. Learning Texture Transformer Network for Image Super-Resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 5790–5799. [Google Scholar]
- Vasluianu, F.A.; Seizinger, T.; Timofte, R.; Cui, S.; Huang, J.; Tian, S.; Xia, S. NTIRE 2023 Image Shadow Removal Challenge Report. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Vancouver, BC, Canada, 18–22 June 2023; pp. 1788–1807. [Google Scholar]
- Xie, C.H.; Liu, S.H.; Li, C.; Cheng, M.M.; Zuo, W.M.; Liu, X.; Wen, S.L.; Ding, E. Image inpainting with learnable bidirectional attention maps. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8857–8866. [Google Scholar]
- Ling, S.G.; Fu, K.; Lin, Y.; You, D.; Cheng, P. Face illumination processing via dense feature maps and multiple receptive fields. Electron. Lett. 2021, 57, 627–629. [Google Scholar] [CrossRef]
- Cui, Y.N.; Ren, W.Q.; Cao, X.C.; Knoll, A. Focal Network for Image Restoration. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Paris, France, 2–6 October 2023; pp. 12955–12965. [Google Scholar]
- Zhang, H.G.; Dai, Y.C.; Li, H.D.; Koniusz, P. Deep Stacked Hierarchical Multi-Patch Network for Image Deblurring. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 27 October–2 November 2019; pp. 5971–5979. [Google Scholar]
- Olson, M.L.; Liu, S.S.; Anirudh, R.; Thiagarajan, J.; Bremer, P.T.; Wong, W.K. Cross-GAN Auditing: Unsupervised Identification of Attribute Level Similarities and Differences Between Pretrained Generative Models. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 18–22 June 2023; pp. 7981–7990. [Google Scholar]
- Solano-Carrillo, E.; Rodríguez, Á.B.; Carrillo-Perez, B.; Steiniger, Y.; Stoppe, J. Look ATME: The Discriminator Mean Entropy Needs Attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 18–22 June 2023; pp. 787–796. [Google Scholar]
- Mirza, M.; Simon, O. Conditional Generative Adversarial Nets. In Proceedings of the Computer Science. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A. Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2242–2251. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.H.; Efros, A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5967–5976. [Google Scholar]
- Li, C.; Wand, M. Precomputed Real-Time Texture Synthesis with Markovian Generative Adversarial Networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 702–716. [Google Scholar]
- Cho, S.J.; Ji, S.W.; Hong, J.P.; Jung, S.W.; Ko, S.J. Rethinking Coarse-to-Fine Approach in Single Image Deblurring. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 694–711. [Google Scholar]
- Rădulescu, V.M.; Maican, C.A. Algorithm for image processing using a frequency separation method. In Proceedings of the International Carpathian Control Conference (ICCC), Sinaia, Romania, 29 May–1 June 2022; pp. 181–185. [Google Scholar]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.H.; Shi, W.Z. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 105–114. [Google Scholar]
- He, K.M.; Zhang, X.; Ren, S.Q.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Caesars Palace, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Nair, V.; Hinton, G. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- He, K.M.; Zhang, X.; Ren, S.Q.; Sun, J. Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1026–1034. [Google Scholar]
- Zamir, S.W.; Arora, A.; Khan, S.H.; Hayat, M.; Khan, F.S.; Yang, M.H. Restormer: Efficient transformer for high-resolution image restoration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–14 June 2022; pp. 5728–5739. [Google Scholar]
- Wang, X.T.; Xie, L.B.; Dong, C.; Shan, Y. Real-ESRGAN: Training Real-World Blind Super-Resolution with Pure Synthetic Data. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, QC, Canada, 7–10 October 2021; pp. 1905–1914. [Google Scholar]
- Johnson, J.; Alahi, A.; Li, F.F. Perceptual losses for real-time style transfer and super-resolution. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 694–771. [Google Scholar]
- Available online: https://pytorch.org/ (accessed on 1 July 2018).
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980v9. [Google Scholar]
- Pan, L.Y.; Chowdhury, S.; Hartley, R.; Liu, M.M.; Zhang, H.G.; Li, H.D. Dual Pixel Exploration: Simultaneous Depth Estimation and Image Restoration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 10–25 June 2021; pp. 4338–4347. [Google Scholar]
- Abuolaim, A.; Delbracio, M.; Kelly, D.; Brown, M.; Milanfar, P. Learning to reduce defocus blur by realistically modeling dual-pixel data. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 2289–2298. [Google Scholar]
- Mehri, A.; Ardakani, P.B.; Sappa, A.D. MPRNet: Multi-Path Residual Network for Lightweight Image Super Resolution. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Piscataway, NJ, USA, 3–8 January 2021; pp. 2703–2712. [Google Scholar]
- Liang, P.W.; Jiang, J.; Liu, X.; Ma, J. BaMBNet: A Blur-Aware Multi-Branch Network for Dual-Pixel Defocus Deblurring. IEEE/CAA J. Autom. Sin. 2022, 9, 878–892. [Google Scholar] [CrossRef]
- Ruan, L.Y.; Chen, B.; Li, J.Z.; Lam, M. Learning to Deblur using Light Field Generated and Real Defocus Images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 16283–16292. [Google Scholar]
- Cui, Y.N.; Ren, W.Q.; Yang, S.N.; Cao, X.C.; Knoll, A. IRNeXt: Rethinking Convolutional Network Design for Image Restoration. In Proceedings of the International Conference on Machine Learning, Honolulu, HI, USA, 15–17 December 2023; pp. 6545–6564. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Number of Photos | Resolution | Camera |
|---|---|---|---|
| CUHK [48] | 1000 | ~470 × 610 | Internet |
| DED [46] | 1022 | 409 × 613 | Lytro Illum |
| DPDD [17] | 500 | 1120 × 1680 | Canon EOS 5D Mark IV |
| LFDOF [47] | 12,000 | 680 × 1008 | Lytro Illum |
| PixelDP [17] | 13 | ~1680 × 1120 | Google Pixel 4 Smartphone |
| RealDOF [19] | 50 | ~1536 × 2320 | Sony 7R IV |
| SDD [49] | 150 | 2048 × 1080 | HUAWEI X2381-VG |
| Metric | PSNR↑ | SSIM↑ | MAE↓ | Params (M) ↓ | FLOPs (G) ↓ | |
|---|---|---|---|---|---|---|
| Method | ||||||
| KPAC ICCV2021 [1] | 25.22 | 0.774 | 0.040 | 2.06 | 349 | |
| DPDNet ECCV2020 [17] | 24.34 | 0.747 | 0.044 | 32.25 | 3150 | |
| DMENet CVPR2019 [18] | 23.90 | 0.720 | 0.047 | 26.71 | 4787 | |
| IFAN CVPR2021 [19] | 25.99 | 0.804 | 0.037 | 10.48 | 794 | |
| FocalNet ICCV2023 [58] | 26.18 | 0.808 | 0.037 | 3.74 | 30 | |
| Restormer CVPR2022 [72] | 25.98 | 0.811 | 0.038 | 26.13 | 4458 | |
| DDDNet CVPR2021 [77] | 25.41 | 0.786 | 0.038 | 6.04 | 1661 | |
| RDPD+ ICCV2021 [78] | 25.39 | 0.772 | 0.040 | 24.28 | 901 | |
| MDPNet WACV2021 [79] | 25.35 | 0.763 | 0.040 | 46.86 | 1898 | |
| BAMBNet JAS2022 [80] | 26.40 | 0.821 | 0.045 | 4.50 | 1804 | |
| DRBNet+ CVPR2022 [81] | 25.73 | 0.791 | 0.039 | 11.69 | 1273 | |
| IRNeXt ICML2023 [82] | 26.30 | 0.814 | 0.037 | 5.46 | 41 | |
| SIDGAN(Ours) | 27.16 | 0.825 | 0.036 | 11.95 | 147 | |
| Metric | PSNR↑ | SSIM↑ | MAE↓ | Params (M)↓ | FLOPs (G)↓ | |
|---|---|---|---|---|---|---|
| Method | ||||||
| EBDB TIP2018 [4] | 22.38 | 0.638 | 0.0509 | - | - | |
| JNB CVPR2015 [10] | 22.36 | 0.635 | 0.0511 | - | - | |
| DPDNet ECCV2020 [17] | 22.67 | 0.666 | 0.0506 | 32.25 | 3150 | |
| DMENet CVPR2019 [18] | 22.41 | 0.639 | 0.0508 | 26.71 | 4787 | |
| IFAN CVPR2021 [19] | 24.71 | 0.749 | 0.0407 | 10.48 | 794 | |
| FocalNet ICCV2023 [58] | 25.02 | 0.725 | 0.0428 | 3.74 | 30 | |
| MPRNet CVPR2019 [59] | 24.37 | 0.734 | 0.0413 | 20.10 | - | |
| Restormer CVPR2022 [72] | 25.09 | 0.762 | - | 26.13 | 4458 | |
| RDPD+ ICCV2021 [78] | 23.22 | 0.693 | 0.0478 | 24.28 | 901 | |
| MDPNet WACV2021 [79] | 23.50 | 0.681 | 0.0404 | 46.86 | 1898 | |
| DRBNet+ CVPR2022 [81] | 24.88 | 0.751 | - | 11.69 | 1273 | |
| IRNeXt ICML2023 [82] | 24.80 | 0.707 | 0.0437 | 5.46 | 41 | |
| SIDGAN (Ours) | 25.10 | 0.772 | 0.0401 | 11.95 | 147 | |
| Metric | PSNR↑ | SSIM↑ | MAE↓ | |
|---|---|---|---|---|
| Method | ||||
| baseline | 26.418 | 0.792 | 0.0383 | |
| baseline + FFEM | 26.770 | 0.800 | 0.0371 | |
| baseline + ARM | 27.076 | 0.815 | 0.0362 | |
| baseline + FFEM + ARM | 27.155 | 0.825 | 0.0355 | |
| Metric | PSNR↑ | SSIM↑ | MAE↓ | |
|---|---|---|---|---|
| Method | ||||
| baseline | 23.874 | 0.690 | 0.0456 | |
| baseline + FFEM | 24.158 | 0.709 | 0.0441 | |
| baseline + ARM | 24.713 | 0.748 | 0.0419 | |
| baseline + FFEM + ARM | 25.100 | 0.772 | 0.0401 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, S.; Zhan, H.; Cao, L. SIDGAN: Efficient Multi-Module Architecture for Single Image Defocus Deblurring. Electronics 2024, 13, 2265. https://doi.org/10.3390/electronics13122265
Ling S, Zhan H, Cao L. SIDGAN: Efficient Multi-Module Architecture for Single Image Defocus Deblurring. Electronics. 2024; 13(12):2265. https://doi.org/10.3390/electronics13122265
Chicago/Turabian StyleLing, Shenggui, Hongmin Zhan, and Lijia Cao. 2024. "SIDGAN: Efficient Multi-Module Architecture for Single Image Defocus Deblurring" Electronics 13, no. 12: 2265. https://doi.org/10.3390/electronics13122265
APA StyleLing, S., Zhan, H., & Cao, L. (2024). SIDGAN: Efficient Multi-Module Architecture for Single Image Defocus Deblurring. Electronics, 13(12), 2265. https://doi.org/10.3390/electronics13122265