1. Introduction
In recent years, the rapid advances in mechanical equipment, electronic devices, and software designs in intelligent systems have brought both challenges and opportunities to engineering control algorithms. At the same time, the model of the control system is becoming more and more complex and diversified and contains multiple subsystems. It is generally believed that there is often a mismatch between the number of controllers and the controlled plants in the complex systems, which makes the control process more vulnerable to communication and computing resources. However, existing control algorithms are usually designed to solve the problem of the one-to-one characteristics of controllers and plants, which impairs their practicability in real-world engineering applications [
1]. In order to solve the control problem of mismatch between the controllers and the controlled plants, it is important to establish a new model to describe these systems and to minimize the usage of resources in the control process under the proposed system form.
What inspired us to develop a new method to solve the mismatch problem between controllers and plants is the working mechanism of the human brain, which cannot handle more than two tasks at once. As studied in [
2], the human brain has two frontal lobes, which can send two tasks to the left and right hemispheres of the brain, respectively, for co-processing. However, when there are more than two tasks, the brain is not be able to complete them at the same time. When humans perform multiple actions, the brain only processes two tasks at a time, while other tasks are always in an inertial state after being triggered by the brain at the last triggered moment. The prefrontal areas are involved in resolving conflicts that occur when tasks in the same brain network are activated [
3]. However, humans seem to be juggling multiple tasks at once, which is the result of the rapid switching between tasks in the brain. Motivated by the brain working process, it has great significance to develop a systematic approach to practical engineering systems with few-to-many features. This systematic approach can be designed and applied to real-life systems where the numbers of controllers and controlled plants do not match, for example, the da Vinci surgical system with one control center and five controlled fingers. Currently, for such systems with a mismatch between controllers and plants, saving communication and computing resources has become an important issue.
Since there are multiple controlled plants and the control signals need to be switched, the overall structure of the system presents the characteristics of switching. At the same time, switching control causes the degradation of system control performance. Moreover, the event-triggered mechanism for the purpose of saving communication and computing resources provides a reasonable and feasible switching logic. To minimize the usage of resources in the control process, it is important to increase the functionality of control systems using real-time scheduling algorithms that execute control tasks based on event-triggered instead of time-triggered execution [
4,
5,
6,
7,
8,
9]. The essential concept behind event-triggered control is to cope with feedback problems so as to determine the tasks to execute in the next moment [
10]. Event-triggered control, also known as interrupt-based feedback [
11], Lebesgue sampling [
12], asynchronous sampling [
13], or state-triggered feedback [
14], has been utilized in a number of applications as an effective alternative to more typical periodic methods. To reduce the number of recomputations and battery-powered energy consumption, a decentralized event-triggered implementation was presented for centralized nonlinear controllers in [
15]. A new event-based control algorithm for SISO systems was proposed using input–output linearity, which proved to be as accurate as continuous control algorithms as long as a reasonable threshold was selected [
16]. Donkers and Heemels developed a decentralized event-triggered mechanism, the stability of which was analyzed using the principle of pulse [
5]. In the case of periodic event-triggered control, [
17] proposed a systematic method for determining the sample time and revising the triggered condition.
Using the concept of multi-threading in the computer field, the system with the mismatch problem between controllers and plants can be called “Multi-thread control system”, in which the whole system can remain stable using ideal switching similar to the brain working process. Due to the switching of actuators in the process of multi-thread control, the whole system becomes a hybrid system, which can operate in real time and handle events as well as continuous computations [
18]. Such systems with specific switching logic have been widely used to describe complex engineering applications, such as automobile braking [
19], traffic control [
20], and robot motion control [
21]. For the scheduling decisions of the switching systems, in [
22], the model presented uses feedback information from the controlled plants. Specifically, the events are triggered when an error signal exceeds a preset threshold, causing the sample period to take random values [
23]. For linear switching systems, the event-triggered mechanism only transmits system states, which ensures exponential stability and aids in the avoidance of the
Zeno phenomenon [
24,
25,
26]. The Zeno phenomenon also happens when the switching event is not very reasonable in multi-thread control systems, so an event-triggered mechanism and a corresponding controller are worth studying for the multi-thread process.
Furthermore, in existing theories, there still exist some obvious limitations. Firstly, existing research on systems with multiple controlled plants usually matches the number of controllers and controlled plants. However, with the rapid development of intelligent systems, a large number of controlled plants share one or a small number of controlled centers. The system with this mismatch has not been described or mathematically modeled yet. Secondly, in traditional research on switching systems, there is a one-to-one correspondence between the controller and the controlled plant, but in real life, the control system has the characteristics of a mismatch between the number of controllers and the controlled plants. Update rules for controllers have not been systematically proposed either in systems with mismatched characteristics. Thirdly, since the system has fewer control centers, a suitable switching logic is required to save computing and communication resources. At present, the research results on the event-triggered mechanism have not been applied to the system with mismatched characteristics. At the same time, in the study of event-triggered mechanisms for systems with multiple controlled plants, the selection of triggered conditions is crucial, as it directly determines the ability to save resources. Finally, in this class of systems exhibiting mismatched characteristics, how to avoid the Zeno phenomenon becomes a new challenge.
In this study, a multi-thread control algorithm with an event-triggered mechanism to address the resource waste problem in the proposed multi-thread system is provided. First, the article analyzes the characteristics of the mismatch between the numbers of controllers and actuators in the system and systematically proposes a multi-thread control structure with linear and nonlinear forms to cope with the switching problem. Then, the switching moment for the proposed system is explored using the event-triggered mechanism, and the response time of the control tasks is explicitly considered, as is the ability of the proposed event-triggered scheduling strategy to ensure input-to-state stability (ISS). Finally, under the proposed scheduling approach, the presence of a minimum interval is demonstrated, suggesting that the Zeno phenomenon can be avoided for the whole system.
The structure of the rest of the multi-thread control algorithm designed in this paper is as follows: Preliminaries are provided in
Section 2, which includes certain definitions and basic properties of the event-triggered scheduling policy using ISS. In
Section 3, it is demonstrated that there is a minimum interval between the execution of one control task and that of another, and the coordination among controlled tasks is discussed. Both simulation and experimental results are given and analyzed in
Section 4. Finally, in
Section 5, the conclusions are presented, showing that the proposed control algorithm based on the event-triggered mechanism can achieve the effect of saving resources in the multi-thread system.
2. Preliminaries
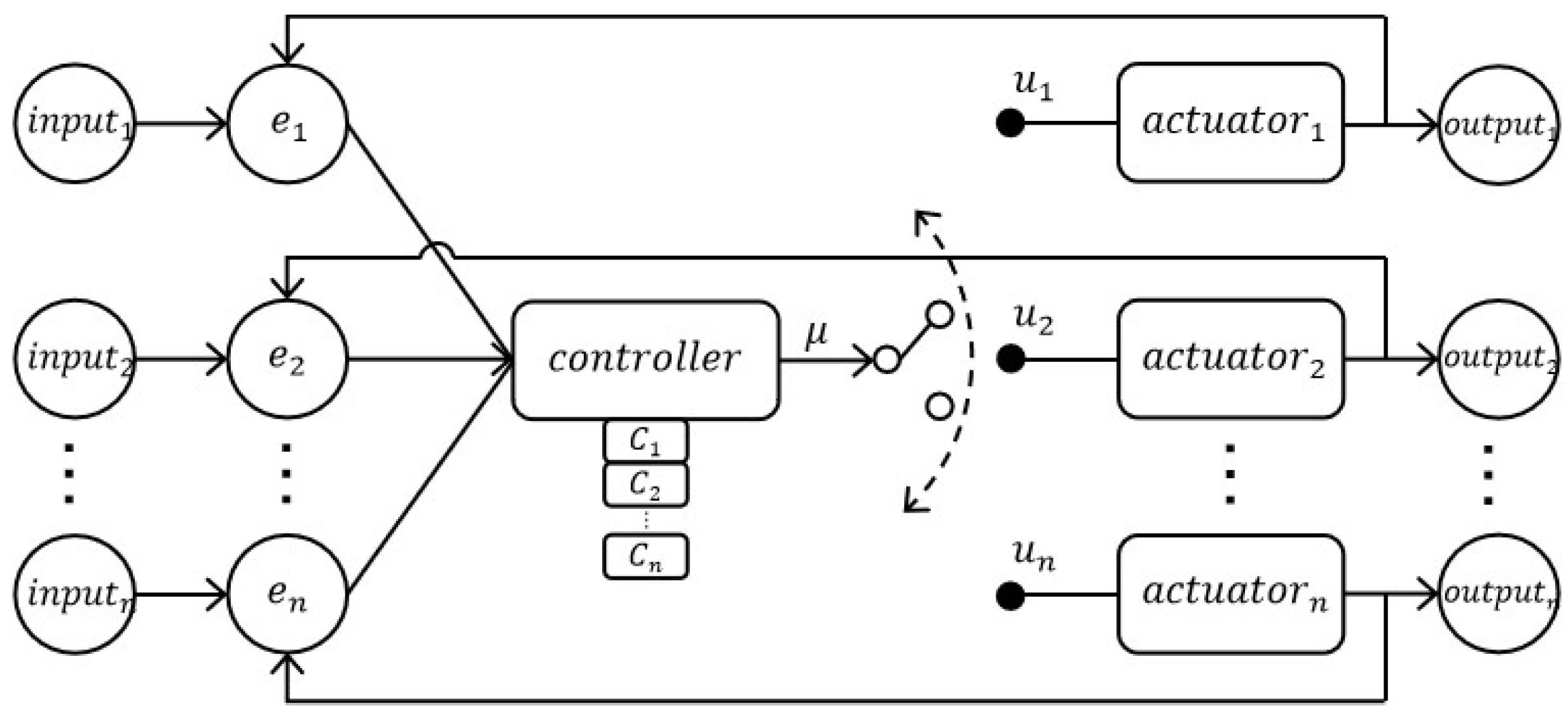
In a multi-thread control system, the numbers of controllers and plants usually do not match. More specifically, the number of controllers is generally smaller than that of plants.
Figure 1 exemplifies a multi-thread control system with
one controller and
n actuators (
n plants), and the same number of actuators and controlled plants are set. In this section, the form of the plants is described, and the problem is solved.
The following will analyze the multi-threaded control system proposed above.
Notation: This article uses standard notation, unless otherwise stated. denotes the l-dimensional Euclidean space. and denote a collection of positive integers. For the independent variables x and u, represents a function that varies with the independent variables. denotes the Euclidean 2-norm. denotes the largest eigenvalue of matrix A. denotes the transpose of matrix A. In this article, denotes the triggered moment, not the sampling moment.
2.1. Plant Form
In this section, we consider a multi-thread control system with
n nonlinear plants and
m controllers (
) as follows:
where
is the state vector of each of the
n plants and
is the actual control law of the
ith actuator. Let
be the output signal of the
jth controller and
be the ideal control law of the
ith plant, which can ensure the global stability of the
ith plant during the continuous control process. When events are triggered, the output values
of the controllers are determined by the ideal control law
. Because the number of controllers is smaller than that of plants, i.e.,
, the controllers need to be switched to guarantee the stability of the plants. Now, we assume that
is the
kth
switching time and
is the state vector of the
ith plant at time
. Therefore, the actual controller update law
can be expressed as follows:
where
,
, and
. It can be seen, according to (
2), that the plants with updated controllers have time-varying and continuous control signals in
, which ensures the stability of these plants until the next switching occurs. In fact, there are cases in which the controllers do not need to be continuously updated in
after the switching occurs but simply at a certain time
, which helps to save both controller and computation resources [
1]. Therefore, another actual controller update law is given as follows:
where
,
, and
. In (
3), the controllers only change at time
and remain unchanged in
.
Let the pth controller be updated at time and the qth controller be unchanged at time . Moreover, let be the measurement errors of n plants, respectively. Measurement errors for are defined as , where is the last triggered time of plant i.
Remark 1. We assume a simple situation to illustrate the above definition of errors . If the th controllers are updated at , and the controllers are updated at , then and .
Then, the following system form is given:
To better illustrate the above system structure and the upcoming multi-thread control algorithm, we consider a linear time-invariant control puzzler with 4 plants and 2 controllers as follows:
The ideal controllers,
, of the system are described as
and
, where
, and
are the feedback gains of the controller. Controllers
and
are assumed to be updated at time
. By (
2), we have
where
. Since two controllers are not continuously updated in
, another actual controller update law is given as follows:
Considering the two conditions of the controllers, the state space expression of the tasks at time
t (
) can be replaced by
or
Remark 2. The purpose of designing two update laws of controllers is to better approach the control methods of real-life devices. Although the control accuracy of the second control law scheme is not as good as the first one in the multi-thread control system, it can save resources better. This scheme is equivalent to adding a zero-order keeper behind each controller.
2.2. Problem Statement
As previously given, the structure of multi-thread control is designed for the multi-objective system with few controllers. Considering the influence of measurement errors on system stability, we will list the basic ISS condition definitions that can ensure the stability of the multi-tread control structure as follows:
Definition 1 ([
27])
. The smooth function : is defined as an ISS Lyapunov function for closed-loop system (1) or (4) if there exist class functions , , β, and γ satisfyingwhere and .
The status of a multi-thread system is sampled at time instants
to determine the controller. These time instants are neither pre-determined nor pre-programmed but are instead implicitly specified by an event-triggered execution rule based on the condition of the plant. We assume that
is the time it takes to calculate the control law and update the actuator from the state read by the sensor, so that
are the time intervals for each controller to update completely. Moreover, at time
, measurement errors
are the same as defined above. By (
11), assuming that the limit of mistake to fulfill is
the dynamics of
are bounded by
Let
; then, (
13) can be replaced with
thus ensuring that
decreases. By carrying out the control tasks, inequality (
12) can be enforced when
Then, the previous execution time,
, is given as
and we also have the multi-thread event-triggered condition as follows:
Remark 3. Equation (15) is the ISS-based event-triggered condition to guarantee that the Lyapunov function does not increase. Since the number of controllers, m, is less than the number of controlled plants, n, it is impossible for us to force errors of all plants to 0 with the updated controller when the event-triggered condition is satisfied. The pth controller whose e is updated to 0 at time is selected using certain rules. Although stability is guaranteed by constructing simple execution rules, it is critical to ensure that the execution time is not arbitrarily close to the accumulation point to evaluate the feasibility of the scheduling policy. In other words, the proposed multi-thread event-triggered condition should promise that the Zeno phenomenon, which can lead to degraded system performance, controller failure, and even other problems, can be avoided.
3. Analysis of Stability
Based on multi-thread control structure (
4) and event-triggered conditions (
17), the main result is given as shown below.
Theorem 1. Consider the multi-thread system described in (1) and (4); input is updated with controller output and ideal global control law described in (3). The closed-loop system is input-to-state stable with respect to the measurement errors, and all the signals are uniformly bounded with event-triggered conditions (17). Moreover, Zeno behavior can be avoided. Proof of Theorem 1. Using (
16), we define a compact set
E for all
and all
that satisfies
Since
and
are Lipschitz continuous,
is continuous. For compact set
E, let
L be the Lipschitz constant [
28], so that
Let
,
,
,
, so that (
19) can be replaced with
Note that by enforcing the more conservative inequality , we guarantee . The above proves that the time interval between successive triggered condition actions is bounded.
Considering the closed-loop form in (
4),
are Lipschitz continuous on compacts, that is,
where
and
Similarly,
is obtained. If the set
and otherwise are 0. Then, the formula can obtained:
Now, we define
and
; the inter-event times can be decided according to the dynamics of
We define , so that and , where is the solution of satisfying . The time of delay for the multi-thread control system is denoted by .
We assume that , where the execution time is limited by equaling 0 to and the interval time is limited by solution of . It is obtained, using integration, that , so .
Now, we discuss the circumstances when
. First, we choose the
satisfying
.
is the Lipschitz constant of
. We assume that
satisfies
, where
always exists when
is continuous and
. We guarantee that for
, we have
and thus also
. Since
, asymptotic stability still ensures that the execution time is bounded by
, where
is defined as the time that
evolves from
to
. Since
, a small enough
value to satisfy the mechanism is picked. It now follows, from the continuity of
with respect to
, the existence of
, such that for any
, we have
Finally, we choose .
It can be obtained according to the above proof that there exists
in such a way that for all response times
, there exists a time
such that inter-execution times
implicitly defined by execution rule (
15) with
. So, Zeno behavior can be avoided for the system. □
Remark 4. In a multi-thread control structure, the controller is quickly updated under the action of the triggered condition, and even in a limited time, it requires an infinite number of updates. This situation is called Zeno phenomenon. This leads to problems such as system performance degradation and controller failure. In the event-triggered structure with the “one-to-one” feature, infinite switching can be regarded as a continuous update process of the controllers. However, in the control structure with the characteristics of “one-to-many” or “minority-to-majority”, it is impossible for resources to serve multiple controlled plants at the same time. So, the Zeno phenomenon in multi-thread control leads to greater risk of instability. The above proof process shows that the proposed algorithm can avoid the Zeno phenomenon.
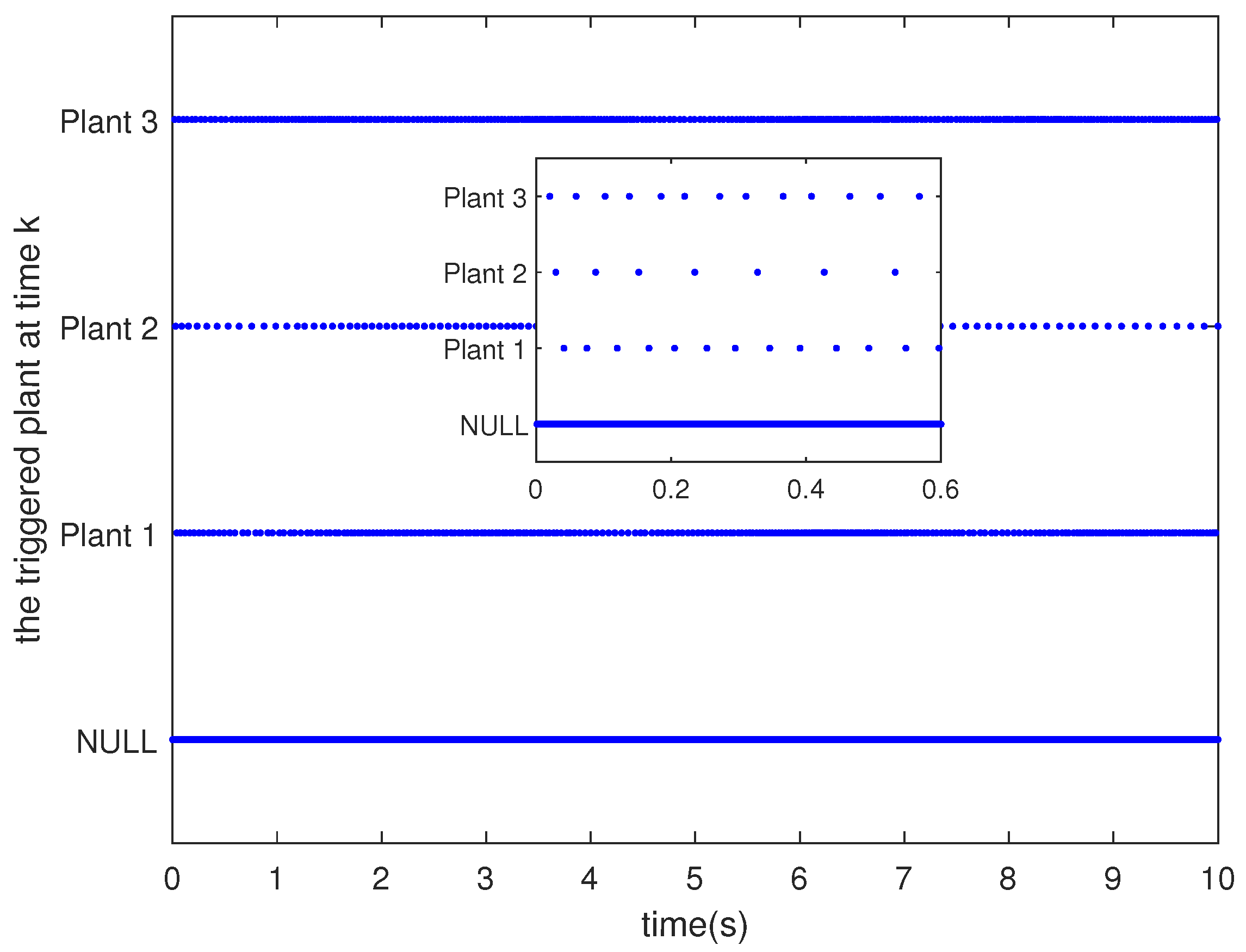
We assume that there are n tasks in the system, , controlled by m controllers. These controlled tasks are ranked in a priority order that determines when they are implemented. Since is the execution rule, we judge the norm of , . If , then . The m controllers are assigned to tasks .
With the event-triggered mechanism, the proposed multi-thread control algorithm can thoroughly address the mismatch problem between m controllers and n actuators online, which makes the algorithm well suited to the needs of real-world engineering applications.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





