

An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids

 ,
,
Abstract
1. Introduction
- (i)
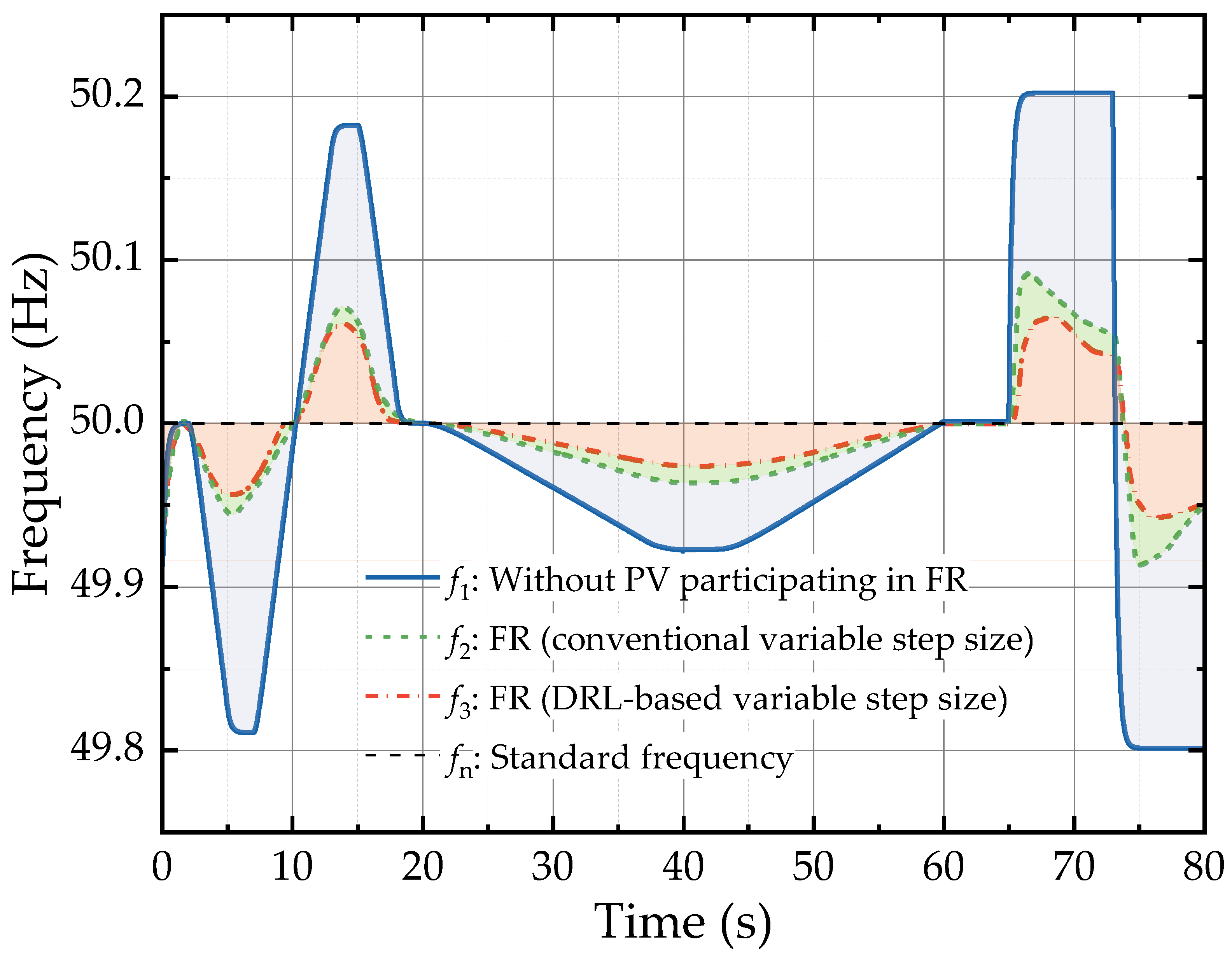
- A new AI-based power reserve control strategy is proposed for PV systems participating in the FR of microgrids, which effectively reduces the frequency deviation of microgrids with high PV permeability.
- (ii)
- A novel variable step-size strategy for BOOST converter duty cycle based on DRL is proposed, which allows PV systems to quickly converge to specified operating points even in the face of fluctuations in the external environment and load.
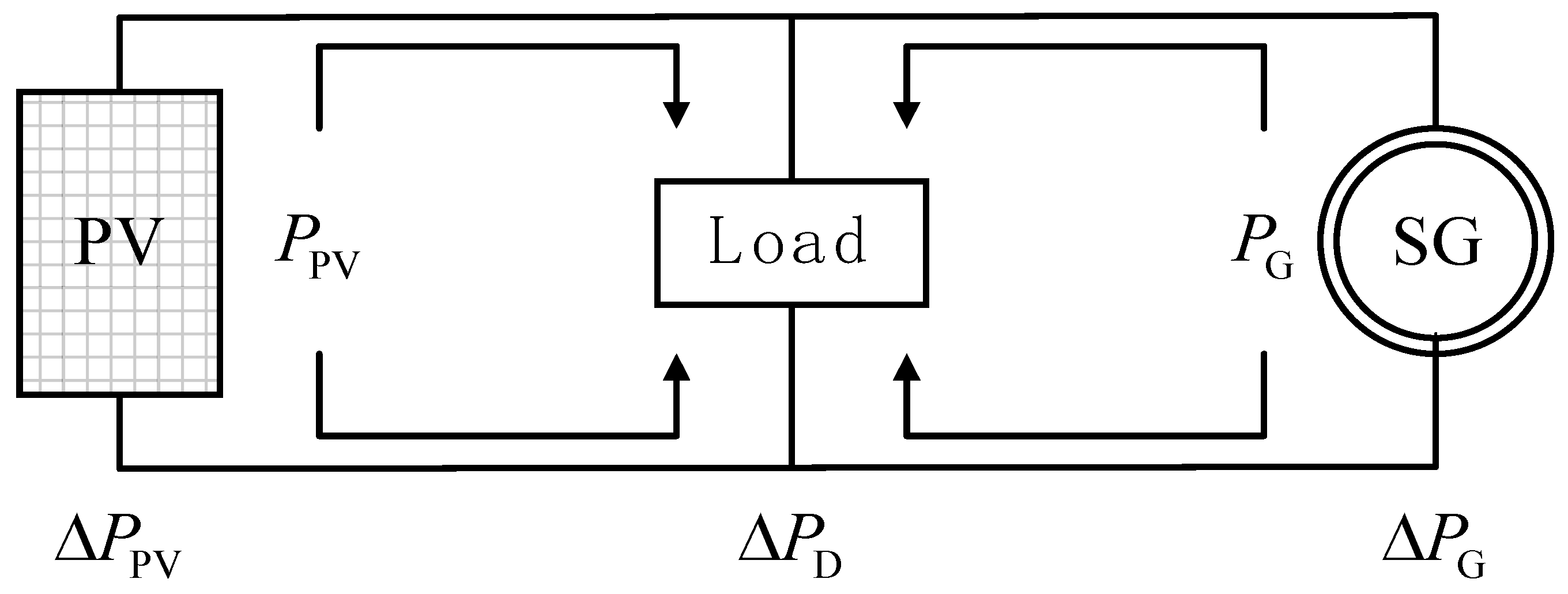
2. Frequency Regulation Strategy for PV Systems Based on Power Reserve Control
2.1. Basic Control Strategies for PV Power Reserve
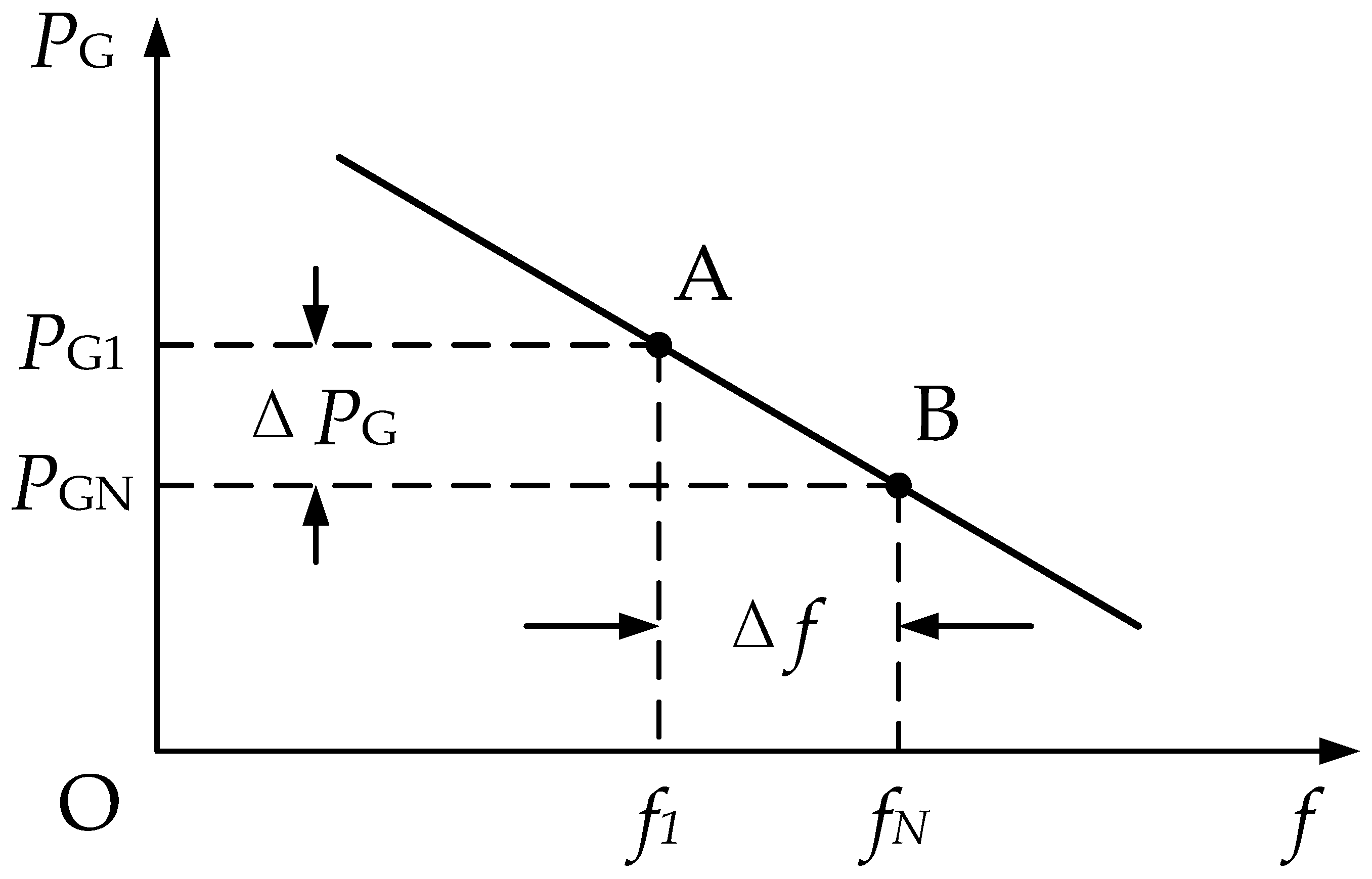
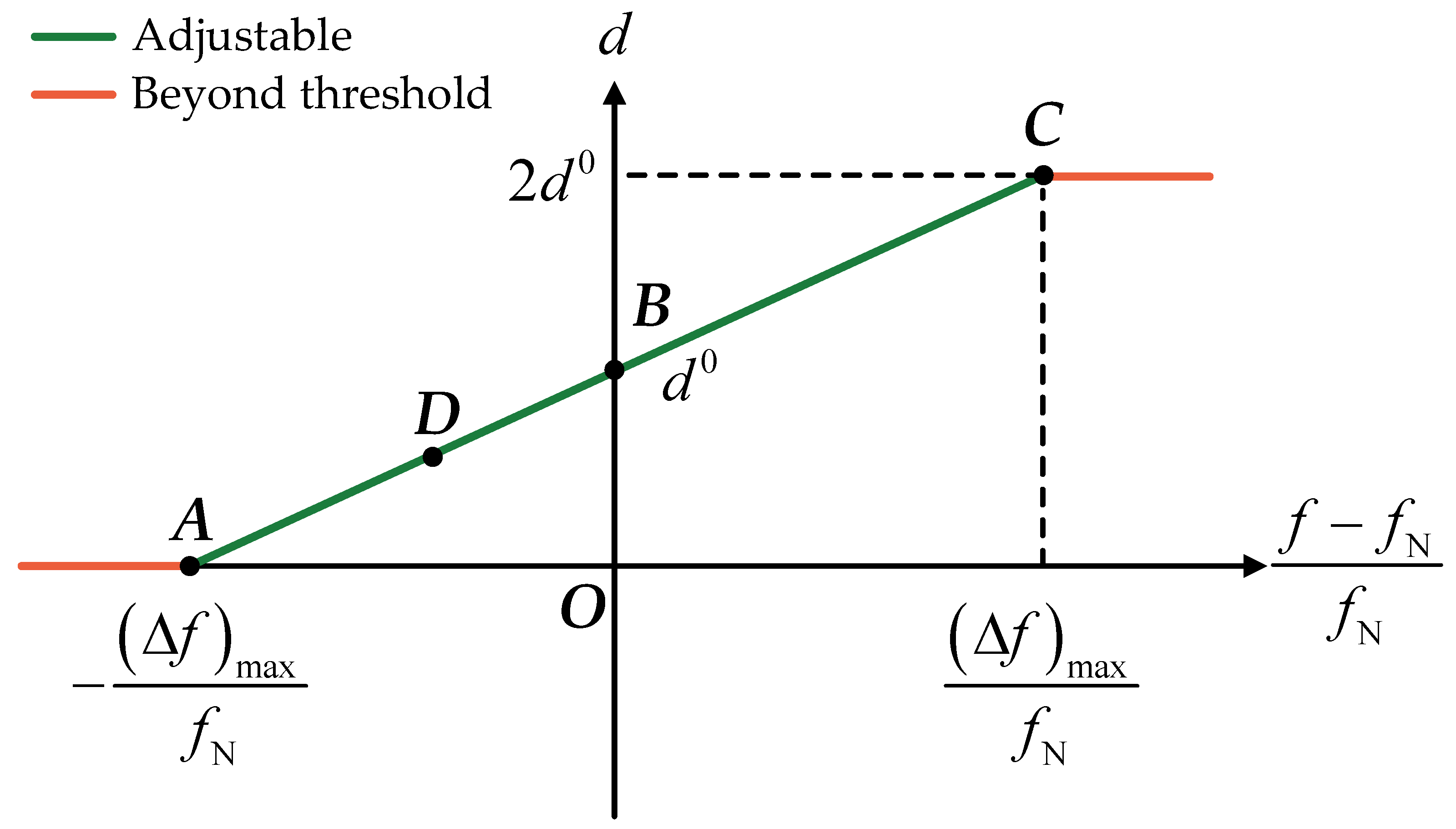
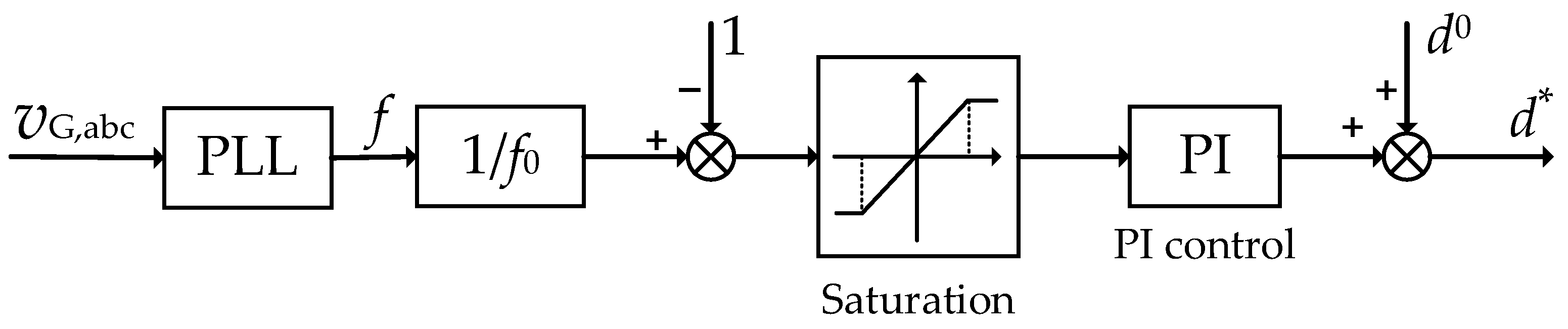
2.2. Determination Method of Power Reserve Ratio Based on the Frequency Response Module
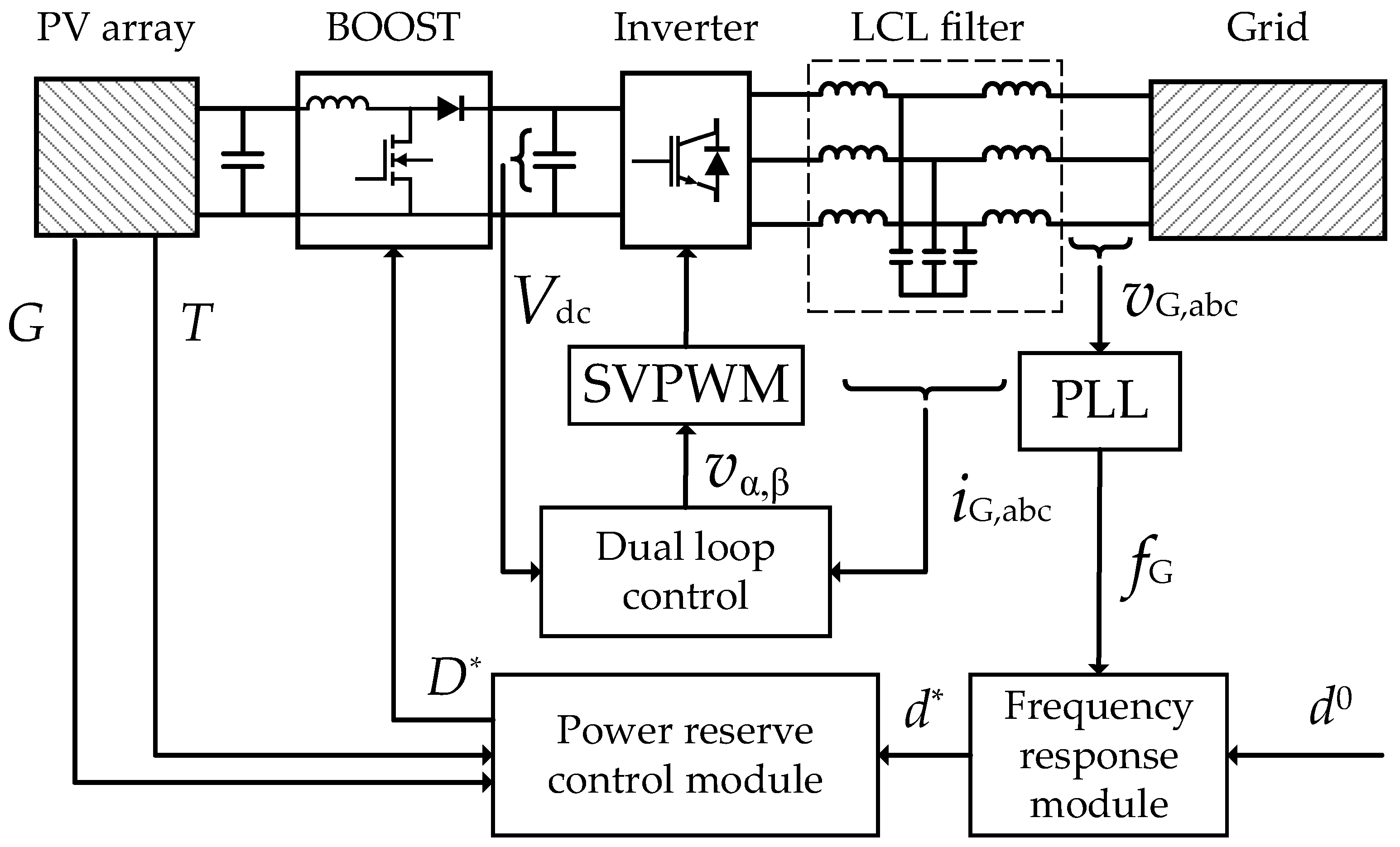
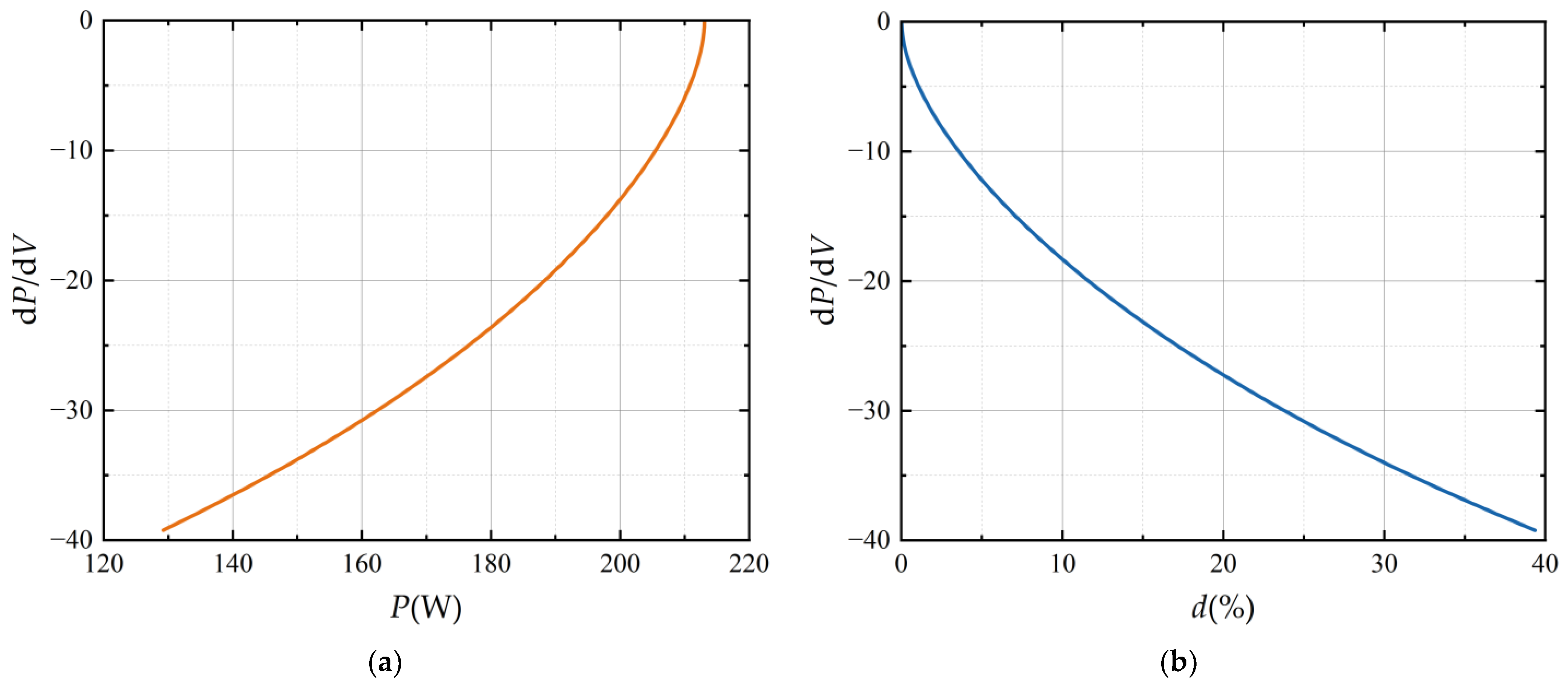
2.3. Determination Method of BOOST Converter Duty Cycle Based on the Power Reserve Control Module
| Algorithm 1: Pseudocode of the power reserve control strategy |
| Set the initial value , step-size , and initial change direction for duty cycle and the change threshold |
| Set , , |
| while True do |
| if do |
| Sample , , |
| Calculate at time t by (10) and using the frequency response module presented in Figure 5 |
| Obtain at time according to (11) |
| Calculate by (12) |
| if do |
| Make the adjustment direction of the duty cycle opposite: |
| else if do |
| Keep the adjustment direction of the duty cycle: |
| end if |
| Adjust the duty cycle: |
| end if |
| if the PV system no longer participates in microgrid frequency control do |
| break while |
| end if |
| end while |
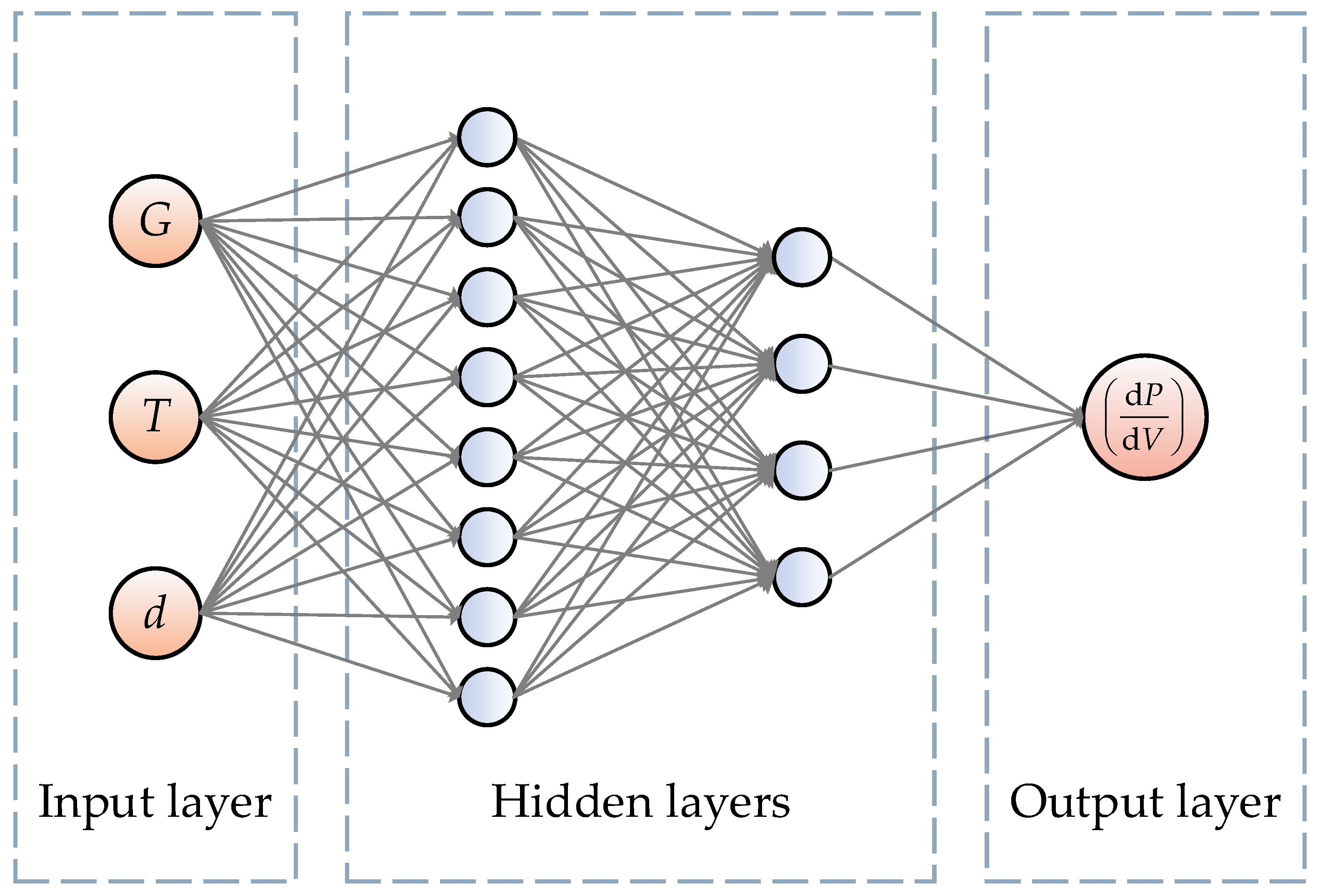
2.4. Solution of Function Expression of
- (i)
- Set multiple combinations of irradiance intensity and cell temperature and test a single PV module under each combination, respectively. The duty cycle of the BOOST converter is continuously adjusted while collecting the following parameters of the PV module under each given external condition: power P, voltage V, and current . The corresponding value of can be obtained by calculating and can be calculated by (7). Thereby, numerous sets of are recorded as the sample dataset.
- (ii)
- Normalize the sample dataset by mapping it into .
- (iii)
- Divide the sample dataset into training set, validation set, and test set by a ratio of 3:1:1.
- (iv)
- Obtain candidate ANN models with different hyperparameters using manual experience and grid search methods.
- (v)
- Train all candidate models on the training set.
- (vi)
- Evaluate the trained candidate models on the validation set and select the optimal ANN model.
- (vii)
- Test the optimal ANN model on the test set.
- (vii)
- Denormalize the output of the optimal ANN model to obtain the predictive values of and analyze them with some evaluation indicators.
- (ix)
- When a new set is given, the trained ANN model is used to calculate the corresponding of the PV module. The actual value of the whole PV array can be obtained by (13).
3. DRL-Based Strategies for Duty Cycle Variable Step-Size and Optimal Initial Power Reserve Ratio Selection
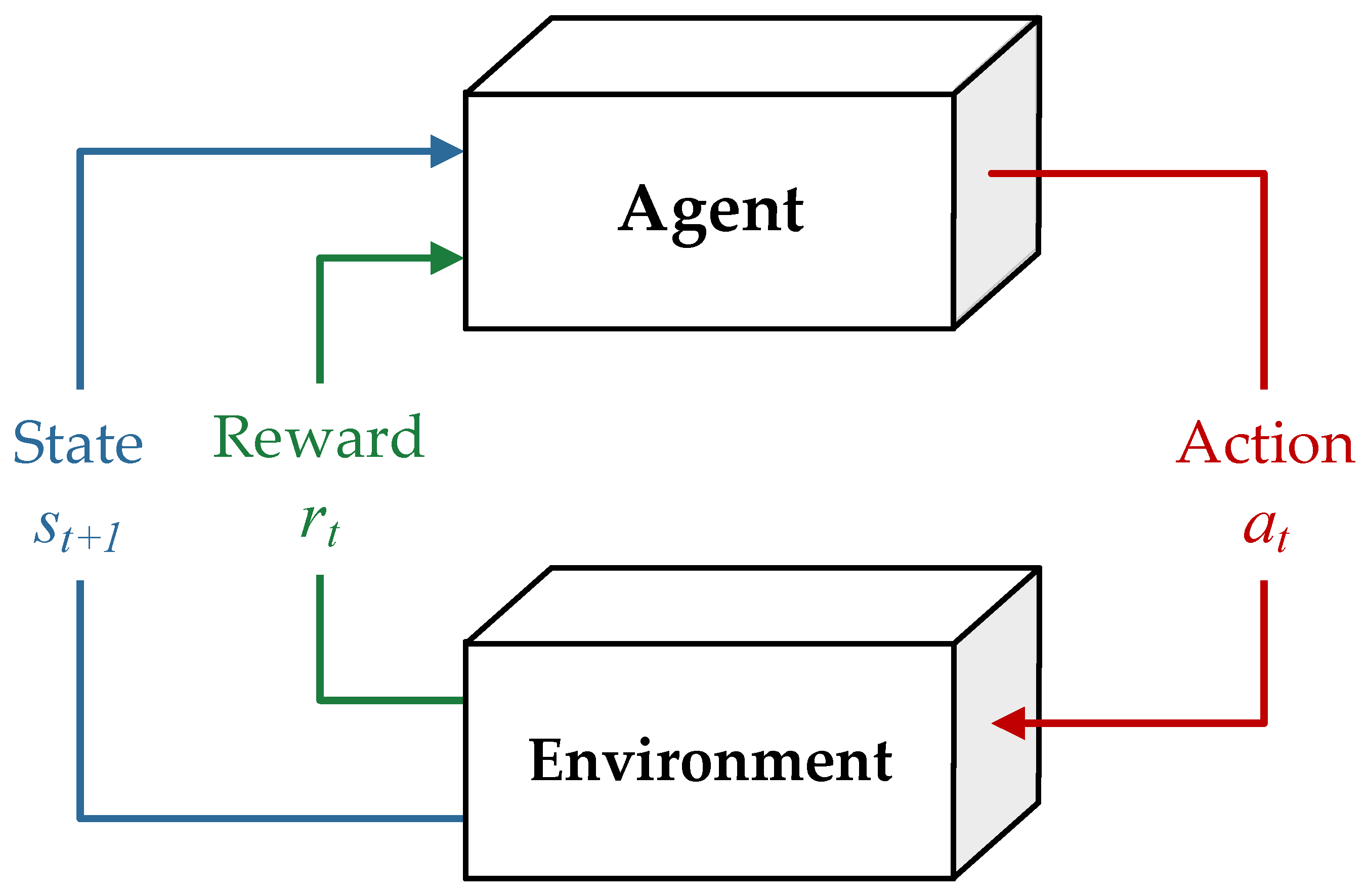
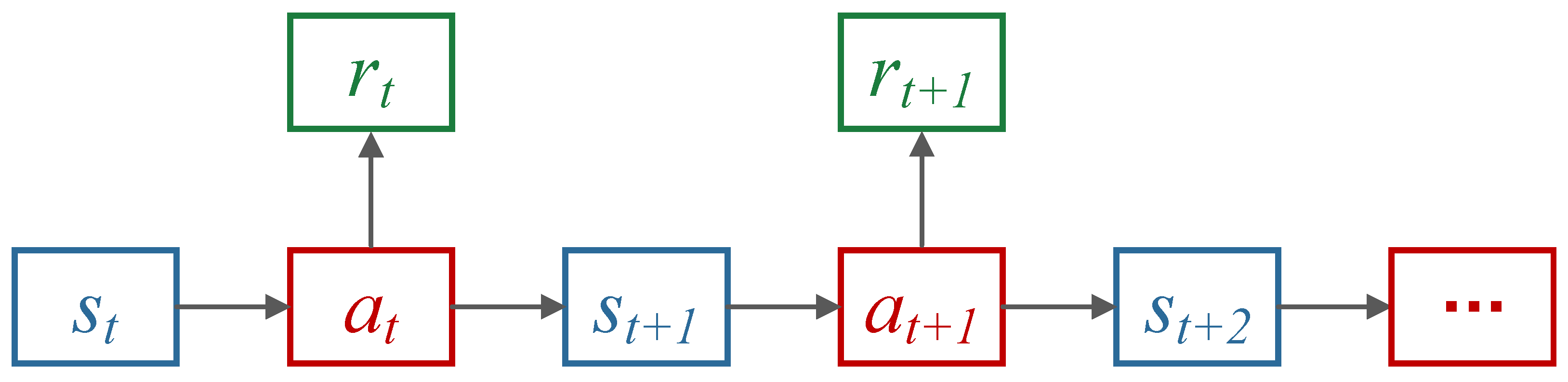
3.1. Fundamentals of Deep Reinforcement Learning
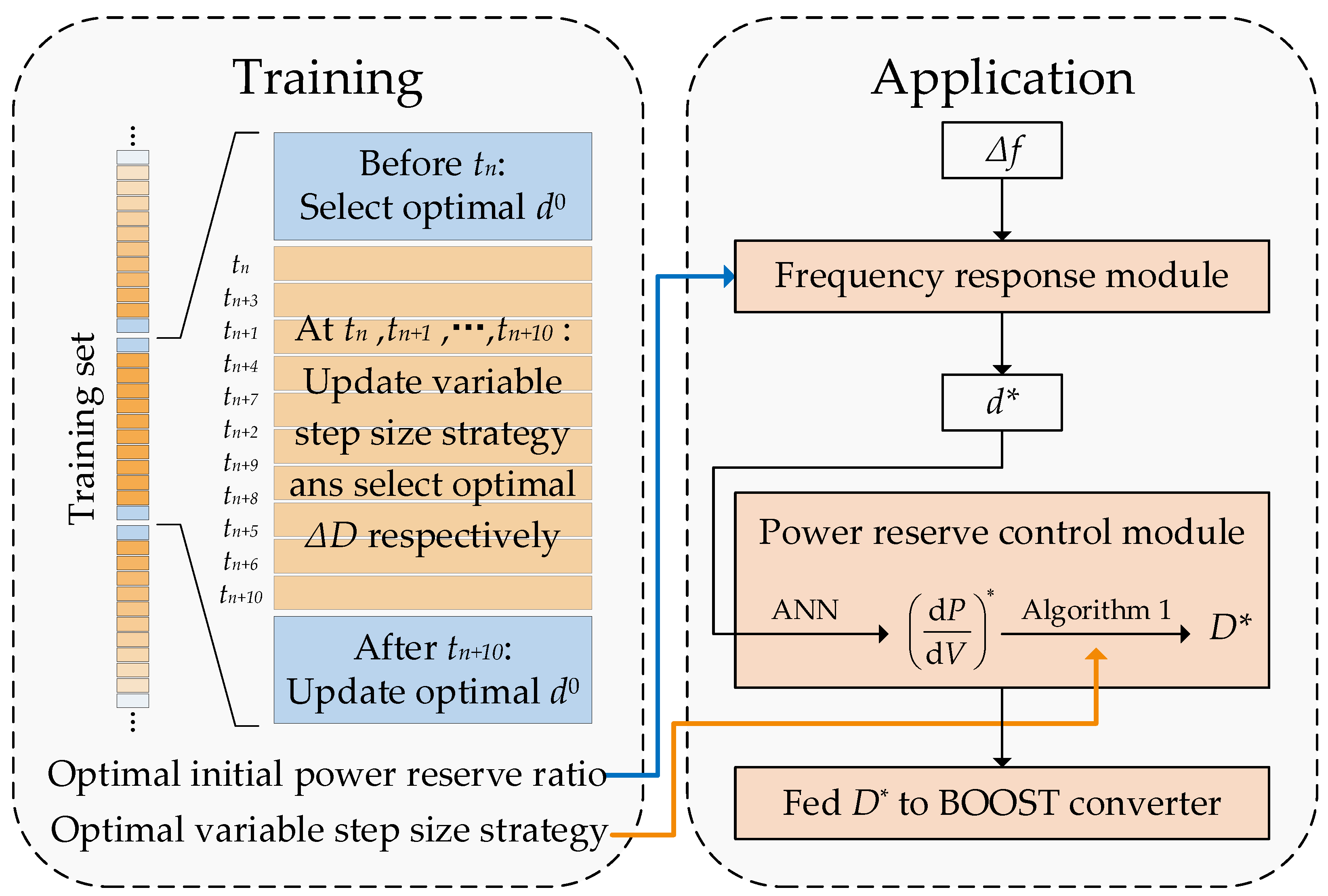
3.2. DRL-Based Optimal Strategy for Duty Cycle with Variable Step Sizes
3.3. DRL-Based Optimal Strategy for Initial Power Reserve Ratio Selection
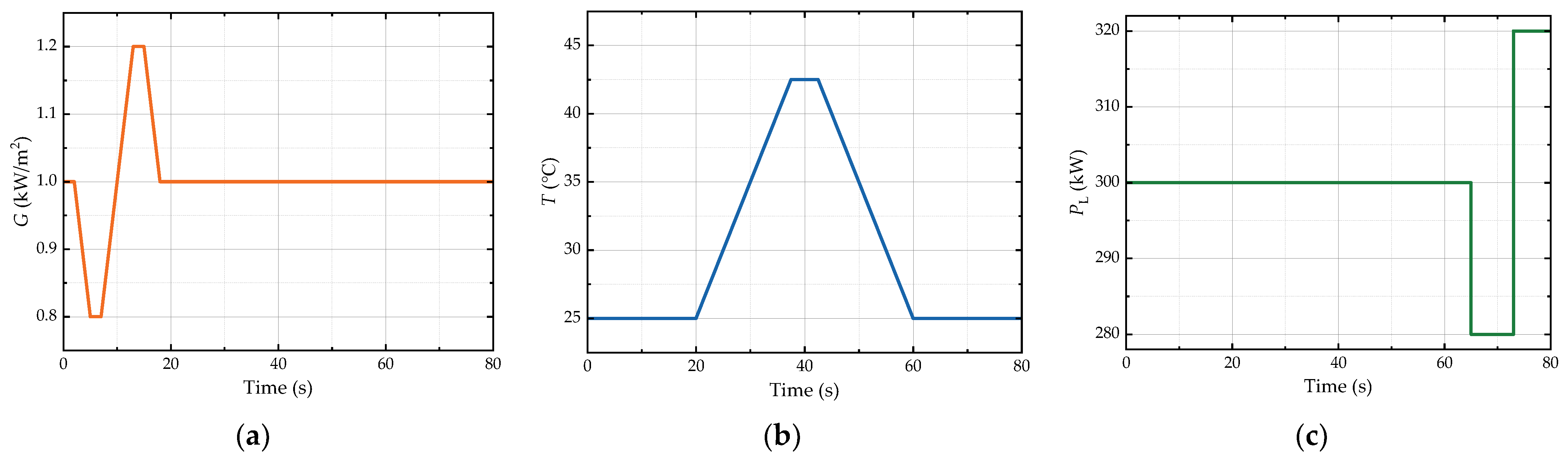
4. Simulation Verification
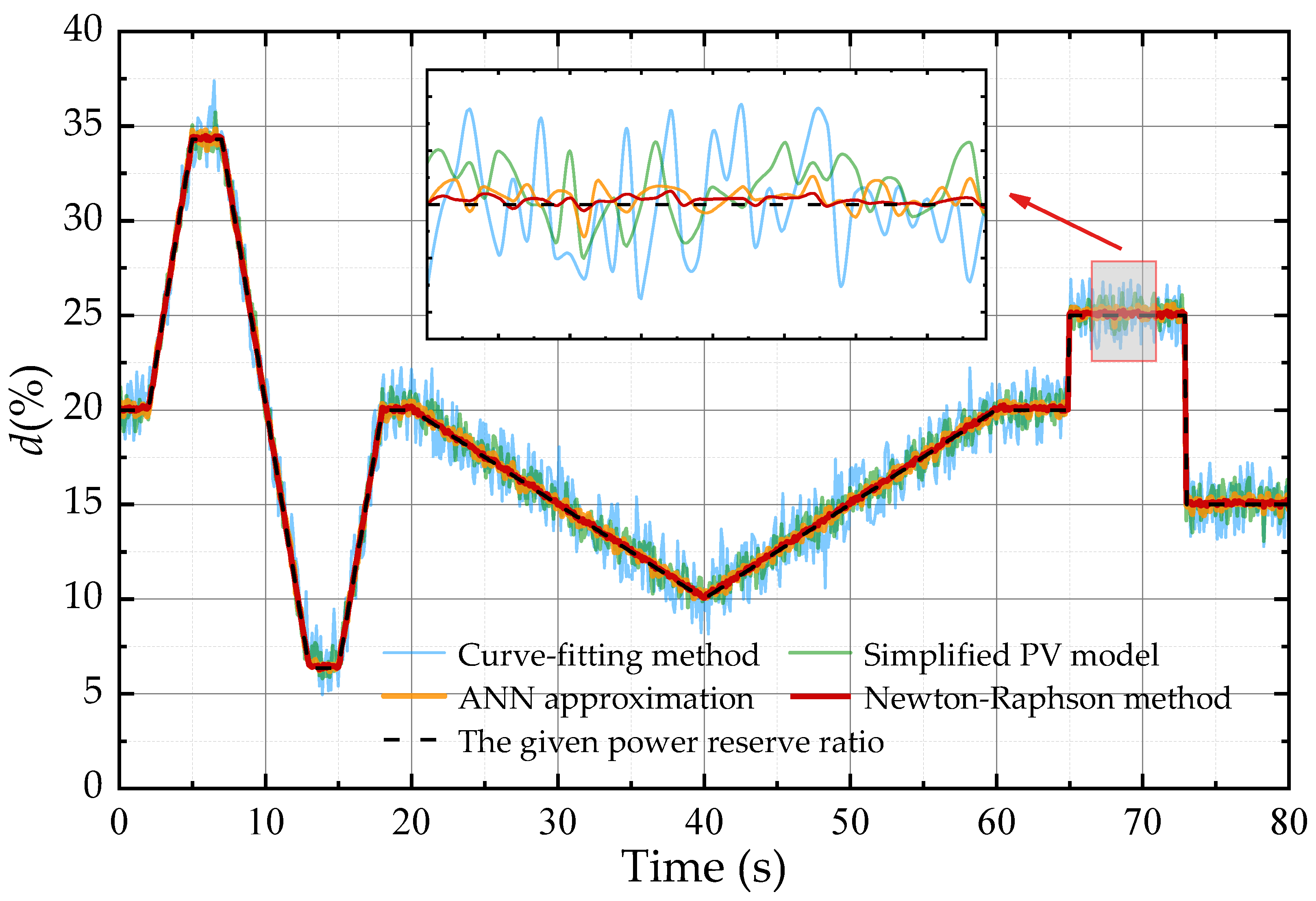
4.1. Case 1: Evaluation of Power Reserve Control Module Using Different Methods
4.2. Case 2: Evaluation of DRL-Based Duty Cycle Variable Step-Size Strategy
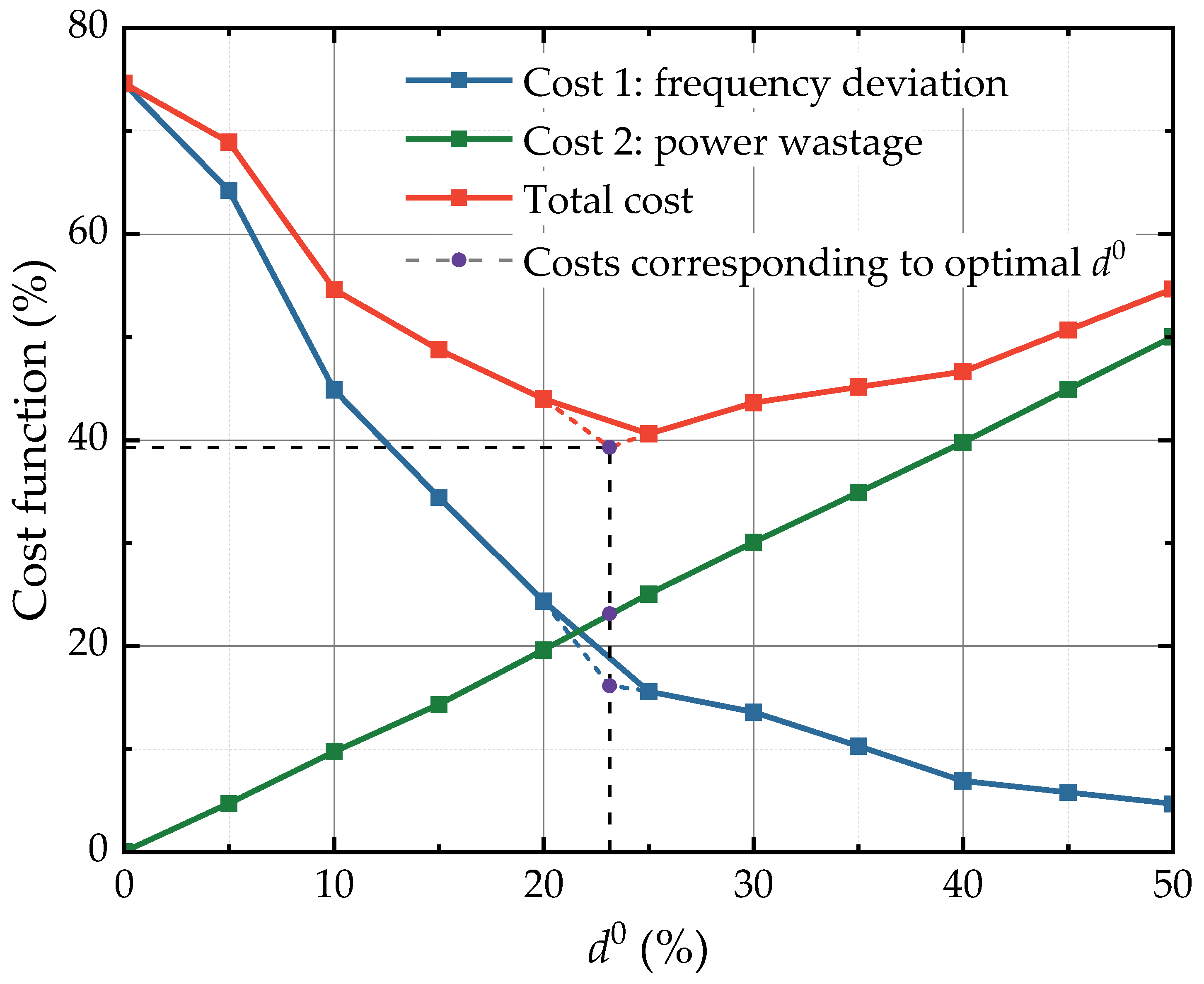
4.3. Case 3: Evaluation of DRL-Based Optimal Power Reserve Ratio Selection Strategy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter Name | Value | Unit |
|---|---|---|---|
| The electron charge | |||
| The Boltzman constant | |||
| The ideality factor | 1.72 | - | |
| The temperature coefficient | |||
| The irradiance | Given | ||
| The ambient temperature | Given | ||
| The reference temperature | 298.15 | ||
| The cell temperature | |||
| The reference short circuit current at | 3.30 | ||
| The short circuit current | A | ||
| The reverse current at | |||
| The diode saturation current | |||
| The shunt resistance | 313.40 | ||
| The series resistance | 0.39 | ||
| The number of cells in parallel | 9 | - | |
| The number of cells in series | 21 | - |
| Symbol | Parameter Name | Value | Unit |
|---|---|---|---|
| Total capacity | 3 | MW | |
| Droop coefficient | 15 | ||
| Governor time constant | 0.2 | - | |
| Reheat coefficient | 5 | - | |
| Reheat time constant | 0.2 | - | |
| Turbine time constant | 0.2 | - | |
| Rotor inertia constant | 4 | - | |
| Damping coefficient | 1 | ||
| Standard frequency | 50 | Hz |
References
- Liu, J.; Han, X.; Wang, L.; Zhang, P.; Wang, J. Operation and Control Strategy of DC Microgrid. Power Syst. Technol. 2014, 38, 2356–2362. [Google Scholar]
- Saidi, A.S. Impact of large photovoltaic power penetration on the voltage regulation and dynamic performance of the Tunisian power system. Energy Explor. Exploit. 2020, 38, 1774–1809. [Google Scholar] [CrossRef]
- Zhang, J.F.; Li, N.; Liu, J. A peaking-regulation-balance-based method for wind & PV power integrated accommodation. In Proceedings of the 2nd International Conference on Energy Engineering and Environmental Protection (EEEP), Sanya, China, 20–22 November 2017. [Google Scholar]
- Yang, B.; Wang, X.; Xie, D.; Guo, Y. Novel control strategy of grid-connected photovoltaic power supply for frequency regulation. J. Eng. 2019, 2019, 1488–1491. [Google Scholar] [CrossRef]
- Xin, H.; Liu, Y.; Wang, Z.; Gan, D.; Yang, T. A New Frequency Regulation Strategy for Photovoltaic Systems Without Energy Storage. IEEE Trans. Sustain. Energy 2013, 4, 985–993. [Google Scholar] [CrossRef]
- Khazaei, J.; Tu, Z.; Liu, W. Small-Signal Modeling and Analysis of Virtual Inertia-Based PV Systems. IEEE Trans. Energy Convers. 2020, 35, 1129–1138. [Google Scholar] [CrossRef]
- Neely, J.; Johnson, J.; Delhotal, J.; Gonzalez, S.; Lave, M. Evaluation of PV Frequency-Watt Function for Fast Frequency Reserves. In Proceedings of the 31st Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 1926–1933. [Google Scholar]
- Li, H.J.; Xu, Y.; Adhikari, S.; Rizy, D.T.; Li, F.X.; Irminger, P. Real and Reactive Power Control of a Three-Phase Single-Stage PV System and PV Voltage Stability. In Proceedings of the General Meeting of the IEEE-Power-and-Energy-Society, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Yan, G.G.; Liang, S.; Jia, Q.; Cai, Y.R. Novel adapted de-loading control strategy for PV generation participating in grid frequency regulation. J. Eng. 2019, 2019, 3383–3387. [Google Scholar] [CrossRef]
- Zhong, C.; Zhou, Y.; Yan, G.G. Power reserve control with real-time iterative estimation for PV system participation in frequency regulation. Int. J. Electr. Power Energy Syst. 2021, 124, 106367. [Google Scholar] [CrossRef]
- Shim, J.W.; Verbic, G.; Zhang, N.; Hur, K. Harmonious Integration of Faster-Acting Energy Storage Systems Into Frequency Control Reserves in Power Grid With High Renewable Generation. IEEE Trans. Power Syst. 2018, 33, 6193–6205. [Google Scholar] [CrossRef]
- Bullich-Massague, E.; Aragues-Penalba, M.; Sumper, A.; Boix-Aragones, O. Active power control in a hybrid PV-storage power plant for frequency support. Sol. Energy 2017, 144, 49–62. [Google Scholar] [CrossRef]
- Shi, R.L.; Zhang, X. VSG-Based Dynamic Frequency Support Control for Autonomous PV-Diesel Microgrids. Energies 2018, 11, 1814. [Google Scholar] [CrossRef]
- Quan, X.J.; Yu, R.Y.; Zhao, X.; Lei, Y.; Chen, T.X.; Li, C.J.; Huang, A.Q. Photovoltaic Synchronous Generator: Architecture and Control Strategy for a Grid-Forming PV Energy System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 936–948. [Google Scholar] [CrossRef]
- Tarraso, A.; Candela, J.I.; Rocabert, J.; Rodriguez, P. Synchronous Power Control for PV Solar Inverters With Power Reserve Capability. In Proceedings of the 43rd Annual Conference of the IEEE-Industrial-Electronics-Society (IECON), Beijing, China, 29 October–1 November 2017; pp. 2712–2717. [Google Scholar]
- Sangwongwanich, A.; Yang, Y.H.; Blaabjerg, F.; Sera, D. Delta Power Control Strategy for Multistring Grid-Connected PV Inverters. IEEE Trans. Ind. Appl. 2017, 53, 3862–3870. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Yang, Y.H.; Blaabjerg, F. A Sensorless Power Reserve Control Strategy for Two-Stage Grid-Connected PV Systems. IEEE Trans. Power Electron. 2017, 32, 8559–8569. [Google Scholar] [CrossRef]
- Li, N.; Liang, J.; Zhao, Y. Research on Dynamic Modeling and Stability of Grid-connected Photovoltaic Power Station. Proc. Chin. Soc. Electr. Eng. 2011, 31, 12–18. [Google Scholar]
- Zarina, P.P.; Mishra, S.; Sekhar, P.C. Exploring frequency control capability of a PV system in a hybrid PV-rotating machine-without storage system. Int. J. Electr. Power Energy Syst. 2014, 60, 258–267. [Google Scholar] [CrossRef]
- Rajan, R.; Fernandez, F.M. Power control strategy of photovoltaic plants for frequency regulation in a hybrid power system. Int. J. Electr. Power Energy Syst. 2019, 110, 171–183. [Google Scholar] [CrossRef]
- Liao, S.Y.; Xu, J.; Sun, Y.Z.; Bao, Y.; Tang, B.W. Wide-area measurement system-based online calculation method of PV systems de-loaded margin for frequency regulation in isolated power systems. IET Renew. Power Gener. 2018, 12, 335–341. [Google Scholar] [CrossRef]
- Batzelis, E.I.; Kampitsis, G.E.; Papathanassiou, S.A. Power Reserves Control for PV Systems With Real-Time MPP Estimation via Curve Fitting. IEEE Trans. Sustain. Energy 2017, 8, 1269–1280. [Google Scholar] [CrossRef]
- Yan, R.F.; Saha, T.K.; Modi, N.; Masood, N.A.; Mosadeghy, M. The combined effects of high penetration of wind and PV on power system frequency response. Appl. Energy 2015, 145, 320–330. [Google Scholar] [CrossRef]
- Banshwar, A.; Sharma, N.K.; Sood, Y.R.; Shrivastava, R. Renewable energy sources as a new participant in ancillary service markets. Energy Strateg. Rev. 2017, 18, 106–120. [Google Scholar] [CrossRef]
- Li, D.; Chen, S.; Chen, Z.; Lu, J. Real-time measurement and reward method of the efficiency of generator unit primary frequency regulation. Autom. Electr. Power Syst. 2004, 28, 70–72. [Google Scholar]
- Liu, F.; Yang, M. Verification and validation of artificial neural network models. In AI 2005: Advances in Artificial Intelligence; Zhang, S., Jarvis, R., Eds.; Lecture Notes in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3809, pp. 1041–1046. [Google Scholar]
- Huang, L.; Fu, M.; Qu, H.; Wang, S.; Hu, S. A deep reinforcement learning-based method applied for solving multi-agent defense and attack problems. Expert Syst. Appl. 2021, 176, 114896. [Google Scholar] [CrossRef]
- Jang, B.; Kim, M.; Harerimana, G.; Kim, J.W. Q-Learning Algorithms: A Comprehensive Classification and Applications. IEEE Access 2019, 7, 133653–133667. [Google Scholar] [CrossRef]
- POSHARP: The Source for Renewable. Available online: http://www.posharp.com/1sth-215-p-solar-panel-from-1soltech_p1621902445d.aspx (accessed on 27 March 2023).















| Method | RMSE | Calculation Time | Total Reduction | |||
|---|---|---|---|---|---|---|
| Value (%) | Reduction (%) | Value (ms) | Reduction (%) | Value (%) | Ranking | |
| Curve-fitting method | 1.28 | 0 | 38.46 | 86.68 | 86.68 | 4 |
| Simplified PV model | 0.63 | 50.78 | 33.47 | 88.40 | 139.18 | 2 |
| ANN approximation | 0.26 | 79.68 | 43.87 | 84.80 | 164.48 | 1 |
| Newton–Raphson method | 0.12 | 90.63 | 288.64 | 0 | 90.63 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Qin, L.; Ruan, J.; Wang, J.; Liu, H.; Tang, X.; Wang, X.; Liu, K. An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids. Electronics 2023, 12, 2075. https://doi.org/10.3390/electronics12092075
Zhou S, Qin L, Ruan J, Wang J, Liu H, Tang X, Wang X, Liu K. An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids. Electronics. 2023; 12(9):2075. https://doi.org/10.3390/electronics12092075
Chicago/Turabian StyleZhou, Sihan, Liang Qin, Jiangjun Ruan, Jing Wang, Haofeng Liu, Xu Tang, Xiaole Wang, and Kaipei Liu. 2023. "An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids" Electronics 12, no. 9: 2075. https://doi.org/10.3390/electronics12092075
APA StyleZhou, S., Qin, L., Ruan, J., Wang, J., Liu, H., Tang, X., Wang, X., & Liu, K. (2023). An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids. Electronics, 12(9), 2075. https://doi.org/10.3390/electronics12092075