
Connectivity Analysis with Co-Channel Interference for Urban Vehicular Ad Hoc Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Motivation
1.2. Contributions
- We analyze the impact of time-varying co-channel interference on connectivity in VANETs with complete information availability. Assuming that the co-channel interference distribution satisfies an independent identical distribution, the time-varying nature of co-channel interference is modeled as delay jitter to obtain the connectivity probability of inter-vehicle packets in urban VANETs.
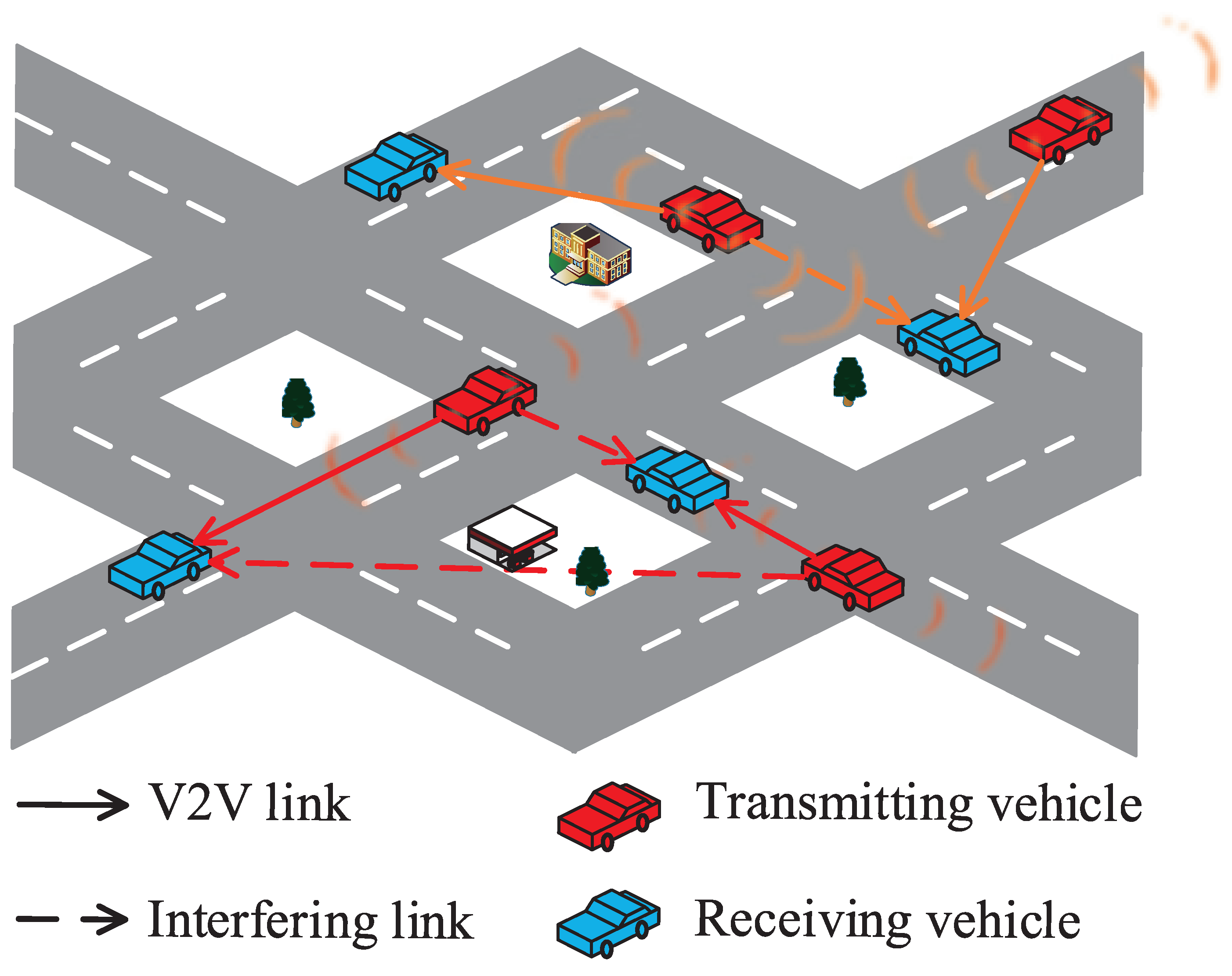
- We conduct an analysis on how uncertain co-channel interference affects the connectivity of V2V communication links, where complete information is not available. The distribution of co-channel interference is estimated using several parameters related to co-channel interference, such as vehicle position, transmission power, and fading coefficient, in combination with the Friss model and Nakagami-m fading model. The CLT is also used to estimate the distribution of the total co-channel interference. The inter-vehicle connection probability is obtained from the SINR of the destination signal.
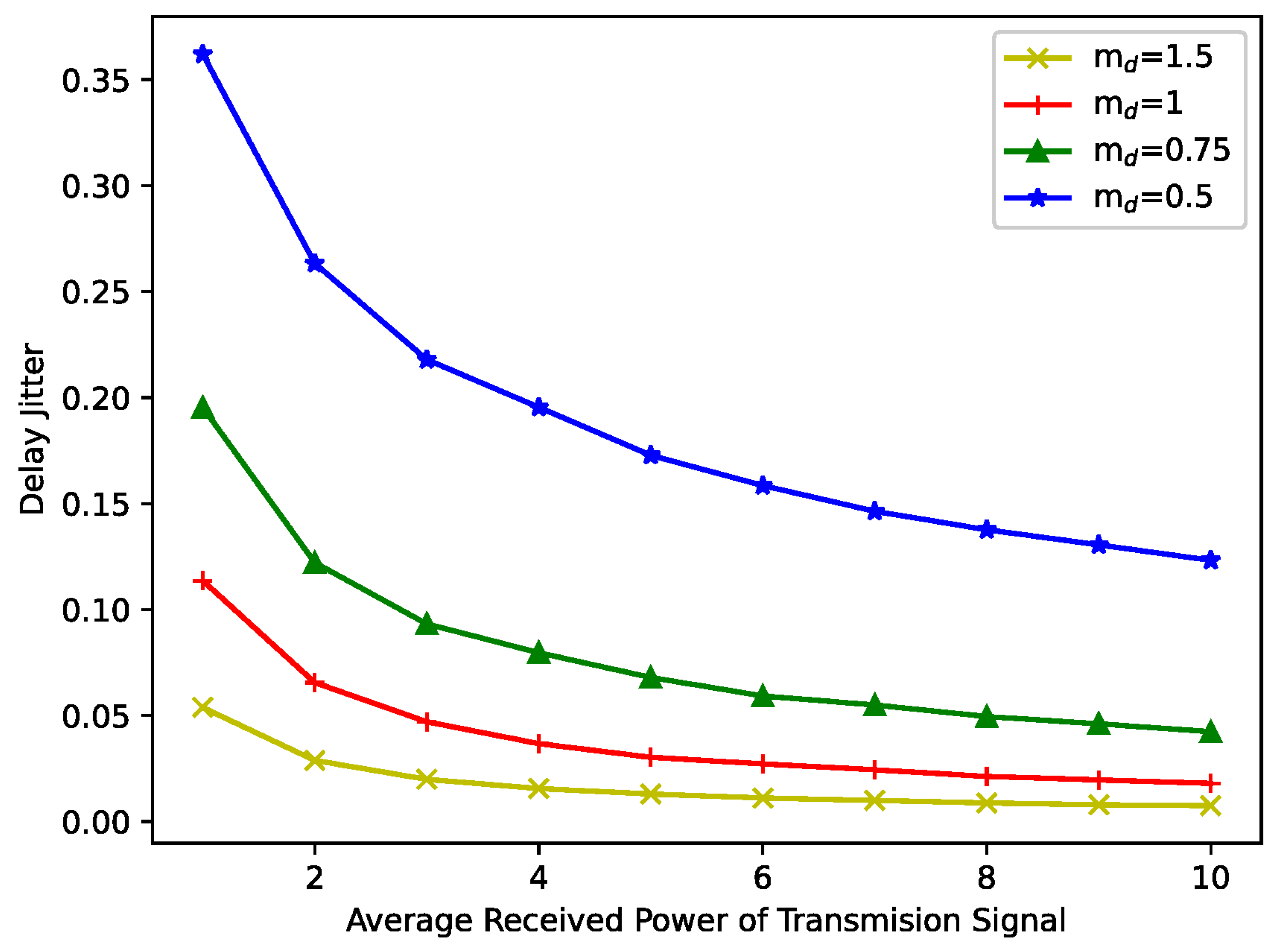
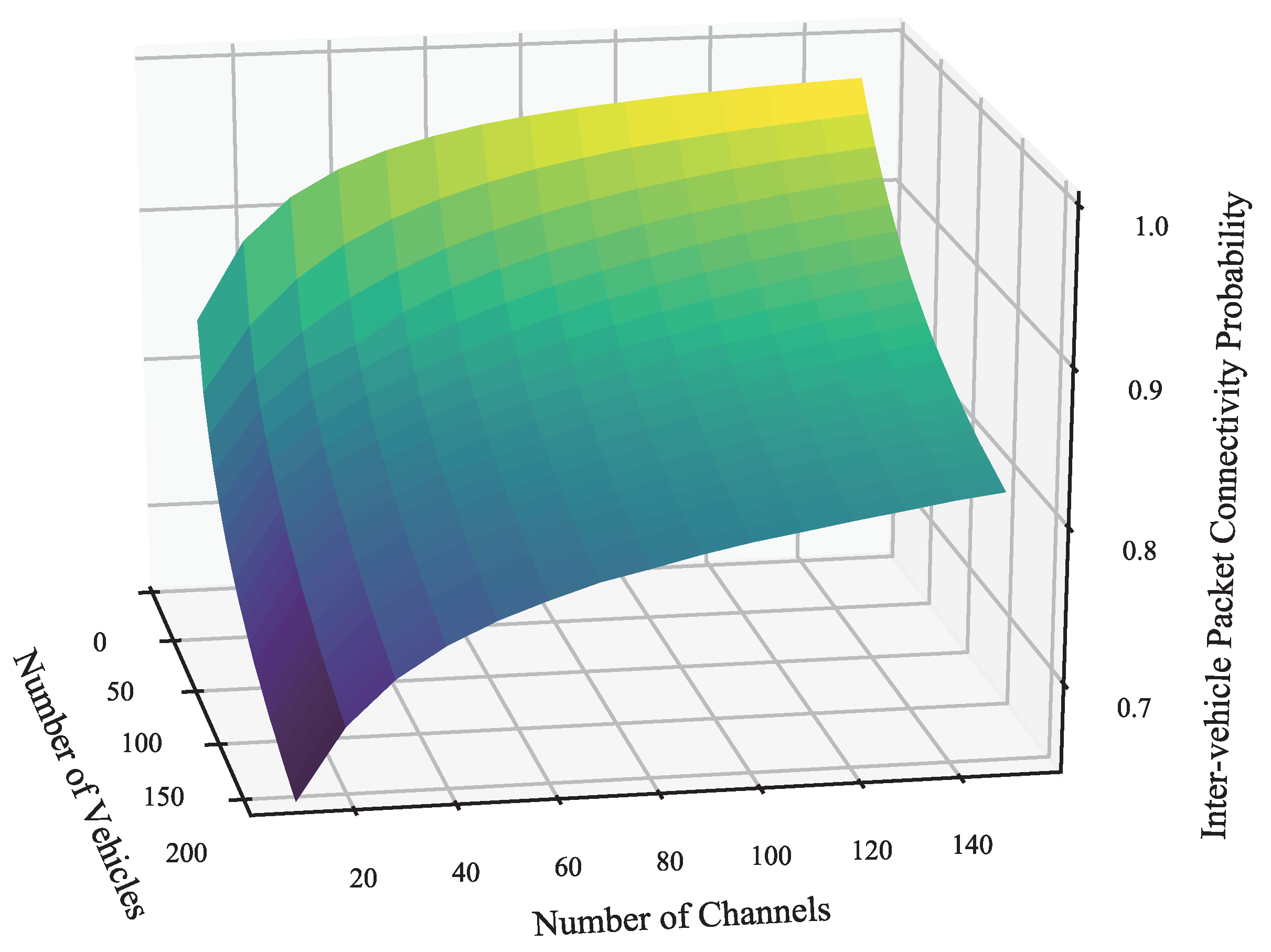
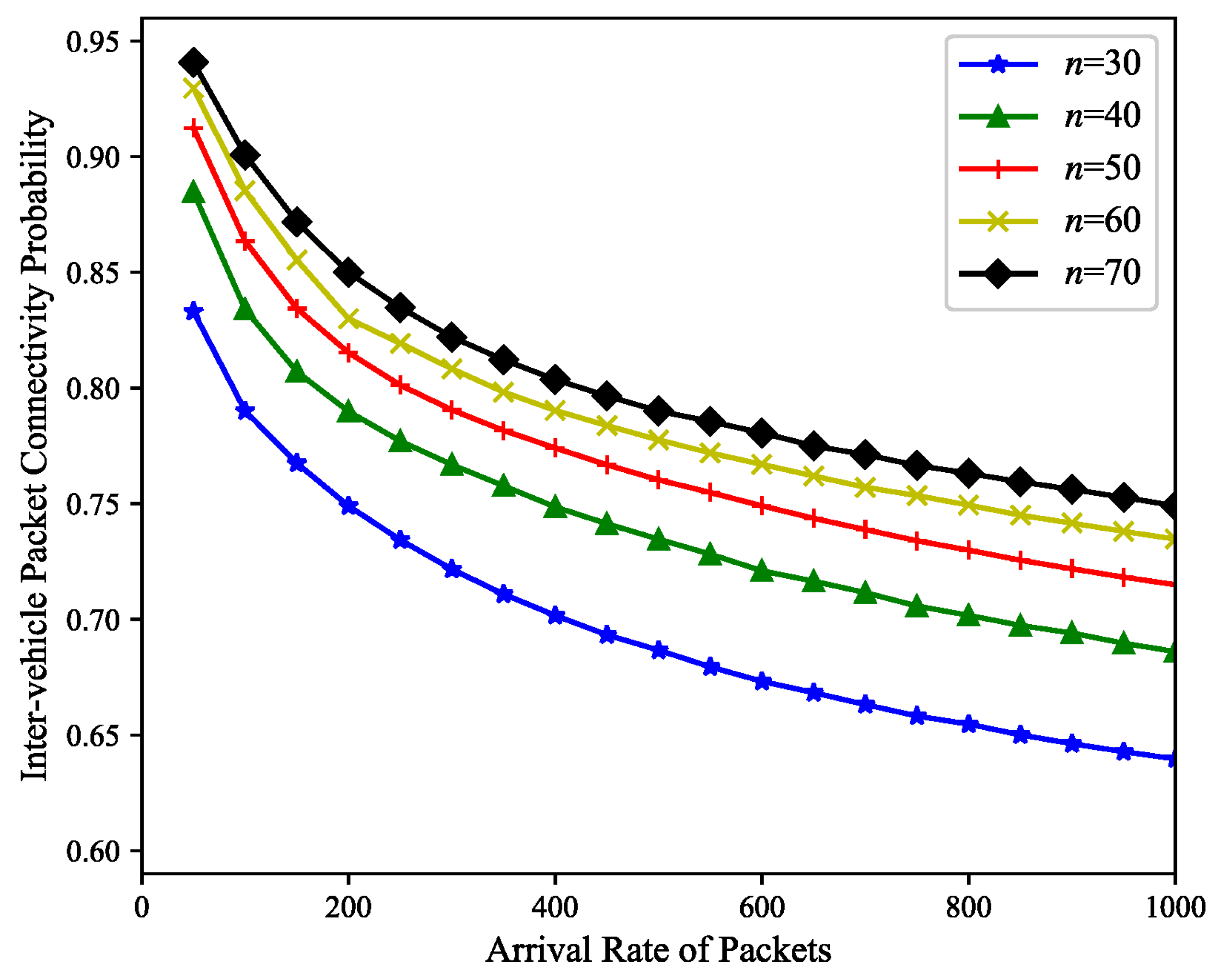
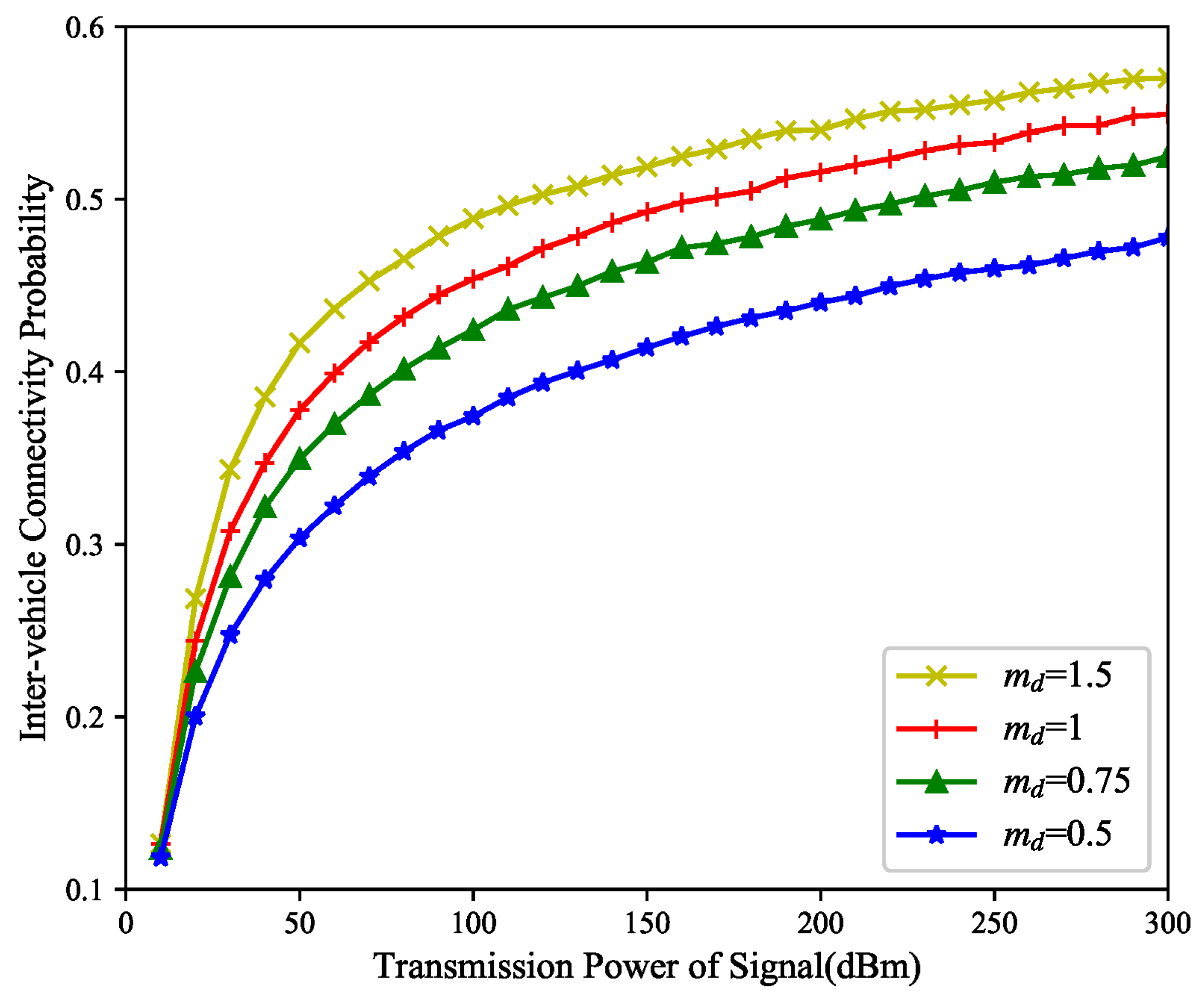
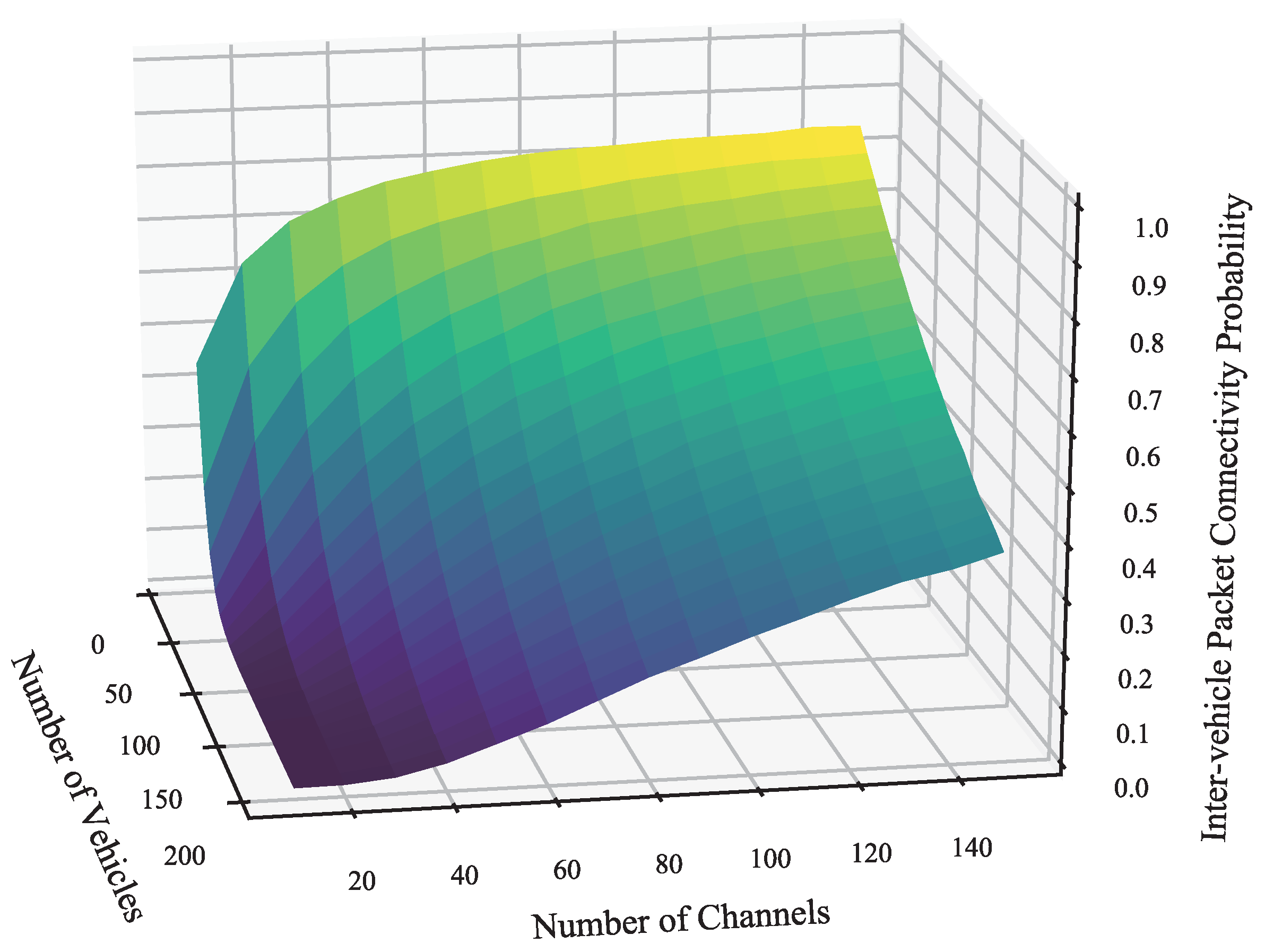
- We numerically analyze the impact of several key parameters such as the number of surrounding vehicles, the arrival rate of packets, and the fading factor, on inter-vehicle packet connectivity and inter-vehicle V2V link connectivity. We find that the effects of co-channel interference are non-negligible, both for inter-vehicle V2V links and for packet transmission. Packet transmission is more sensitive to co-channel interference when packet arrival rates increase and the fading of the channel becomes severe.
1.3. Paper Outline
2. Related Work
3. System Model
3.1. Traffic Flow Model
3.2. Radio Propagation Model
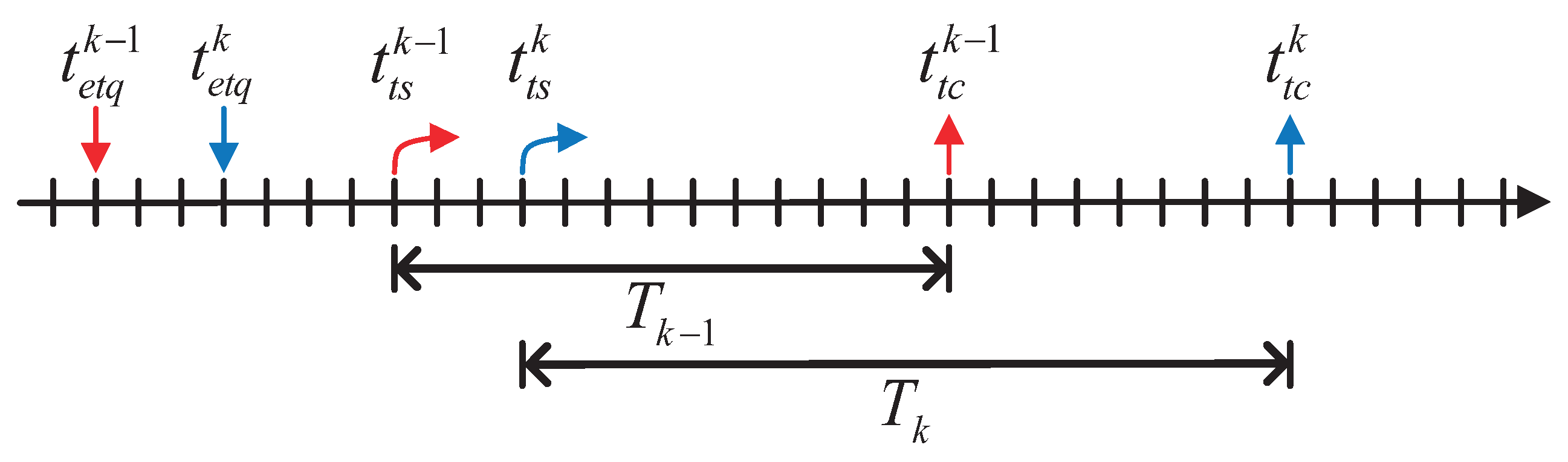
3.3. Delay Jitter Model
4. Probabilistic Analysis of Connectivity in VANETs with Complete Information
4.1. PDF of the Destination V2V Link’s SINR
4.2. VANETS Connectivity Probability in View of Delay Jitter
5. Probabilistic Analysis of Connectivity in VANETs with Incomplete Information
5.1. PDF of Interference Power Generated by Single Vehicle
5.2. PDF of Interference Power Generated by Multiple Vehicles
5.3. Inter-Vehicle Connectivity Probability with SINR
6. Numerical Results
6.1. Connectivity of VANETs with Complete Channel Information
6.2. Connectivity of VANETs with Incomplete Channel Information
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gramaglia, M.; Trullols-Cruces, O.; Naboulsi, D.; Fiore, M.; Calderon, M. Vehicular networks on two Madrid highways. In Proceedings of the 2014 Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Singapore, 30 June–3 July 2014; pp. 423–431. [Google Scholar] [CrossRef]
- Zhao, J.; Li, Q.; Gong, Y.; Zhang, K. Computation Offloading and Resource Allocation For Cloud Assisted Mobile Edge Computing in Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 7944–7956. [Google Scholar] [CrossRef]
- Qu, X.; Liu, E.; Wang, R.; Ma, H. Complex Network Analysis of VANET Topology with Realistic Vehicular Traces. IEEE Trans. Veh. Technol. 2020, 69, 4426–4438. [Google Scholar] [CrossRef]
- Zhao, J.; Sun, X.; Li, Q.; Ma, X. Edge Caching and Computation Management for Real-Time Internet of Vehicles: An Online and Distributed Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2183–2197. [Google Scholar] [CrossRef]
- Seo, H.; Lee, K.D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE evolution for vehicle-to-everything services. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Zhao, J.; Ni, S.; Yang, L.; Zhang, Z.; Gong, Y.; You, X. Multiband cooperation for 5G HetNets: A promising network paradigm. IEEE Veh. Technol. Mag. 2019, 14, 85–93. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, J.; Yang, L.; Ai, B.; Ni, S. Future 5G-oriented system for urban rail transit: Opportunities and challenges. China Commun. 2021, 18, 1–12. [Google Scholar] [CrossRef]
- Elaraby, S.; Abuelenin, S.M. Fading Improves Connectivity in Vehicular Ad Hoc Networks. arXiv 2019, arXiv:1910.05317. [Google Scholar]
- Zhao, J.; Yang, L.; Xia, M.; Motani, M. Unified Analysis of Coordinated Multi-Point Transmissions in mmWave Cellular Networks. IEEE Internet Things J. 2022, 9, 12166–12180. [Google Scholar] [CrossRef]
- Li, X.; Zhou, R.; Zhou, T.; Liu, L.; Yu, K. Connectivity Probability Analysis for Green Cooperative Cognitive Vehicular Networks. IEEE Trans. Green Commun. Netw. 2022, 6, 1553–1563. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, J.; Wu, Y. Analysis of the Downlink Connectivity Probability within the Two-Hop Coverage of an RSU in VANET. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Pan, B.; Wu, H. Performance Analysis of Connectivity Considering User Behavior in V2V and V2I Communication Systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Durrani, S.; Zhou, X.; Chandra, A. Effect of Vehicle Mobility on Connectivity of Vehicular Ad Hoc Networks. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference—Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Panichpapiboon, S.; Pattara-atikom, W. Connectivity Requirements for Self-Organizing Traffic Information Systems. IEEE Trans. Veh. Technol. 2008, 57, 3333–3340. [Google Scholar] [CrossRef]
- Bian, C.; Zhao, J.; Sun, X.; Li, X.; Zou, D. Network Connectivity Performance Analysis of Platoon-based Vehicular Ad Hoc Network on a Two-Way Lane. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Abboud, K.; Zhuang, W. Stochastic Analysis of a Single-Hop Communication Link in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2297–2307. [Google Scholar] [CrossRef]
- Akhtar, N.; Ergen, S.C.; Ozkasap, O. Vehicle Mobility and Communication Channel Models for Realistic and Efficient Highway VANET Simulation. IEEE Trans. Veh. Technol. 2015, 64, 248–262. [Google Scholar] [CrossRef]
- Sataraddi, M.J.; Kakkasageri, M.S. Connectivity and Delay Aware Reliable Routing in Vehicular Ad hoc Networks. In Proceedings of the 2019 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Goa, India, 16–19 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Shao, C.; Leng, S.; Zhang, Y.; Vinel, A.; Jonsson, M. Performance Analysis of Connectivity Probability and Connectivity-Aware MAC Protocol Design for Platoon-Based VANETs. IEEE Trans. Veh. Technol. 2015, 64, 5596–5609. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Gong, Y. Study of Connectivity Probability of Vehicle-to-Vehicle and Vehicle-to-Infrastructure Communication Systems. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Abuelenin, S.M.; Elaraby, S. A Generalized Framework for Connectivity Analysis in Vehicle-to-Vehicle Communications. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5894–5898. [Google Scholar] [CrossRef]
- Hanshi, S.M.; Kadhum, M.M.; Wan, T.C. On Connectivity Analysis of Vehicular Ad hoc Networks in Presence of Channel Randomness. In Proceedings of the 4th International Conference on Internet Applications, Protocols and Services (NETAPPS2015), CyberJaya, Malaysia, 1–3 December 2015. [Google Scholar]
- Stadler, C.; Gruber, T.; German, R.; Eckhoff, D. A Line-of-Sight probability model for VANETs. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 466–471. [Google Scholar] [CrossRef]
- Chen, R.; Sheng, Z.; Zhong, Z.; Ni, M.; Michelson, D.G.; Leung, V.C. Analysis on connectivity performance for vehicular ad hoc networks subjected to user behavior. In Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Dubrovnik, Croatia, 24–28 August 2015; pp. 26–31. [Google Scholar] [CrossRef]
- Andreadis, A.; Rizzuto, S.; Zambon, R. A cross-layer jitter-based TCP for wireless networks. EURASIP J. Wirel. Commun. Netw. 2016, 2016, 191. [Google Scholar] [CrossRef]
- Verma, D.; Zhang, H.; Ferrari, D. Delay jitter control for real-time communication in a packet switching network. In Proceedings of the TRICOMM ‘91: IEEE Conference on Communications Software: Communications for Distributed Applications and Systems, Chapel Hill, NC, USA, 18–19 April 1991; pp. 35–43. [Google Scholar] [CrossRef]
- Chung, J.M.; Soo, H.M. Jitter analysis of homogeneous traffic in differentiated services networks. IEEE Commun. Lett. 2003, 7, 130–132. [Google Scholar] [CrossRef]
- Dahmouni, H.; Ghazi, H.E.; Bonacci, D.; Sanso, B.; Girard, A. Imprvoing QoS of all-IP Generation of Pre-WiMax Networks Using Delay-Jitter Model. J. Telecommun. 2010, 2, 99–103. [Google Scholar]
- Chen, L.; Wang, X.; Zhang, X.; Yu, Z.; Kashif, S.; Tan, Y.A. A payload-dependent packet rearranging covert channel for mobile VoIP traffic. Inf. Sci. 2018, 465, 162–173. [Google Scholar]
- Chi, X.F.; Zhang, M.H.; Zhao, L.L.; Qian, L. Analysis of Access Delay and Delay Jitter for the CSMA/CA Mechanism with Inactive Period. Radioengineering 2019, 27, 254–264. [Google Scholar] [CrossRef]
- Ross, S.M. Stochastic Processes; John Wiley & Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Shankar, P. A compound scattering pdf for the ultrasonic echo envelope and its relationship to K and Nakagami distributions. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 339–343. [Google Scholar] [CrossRef]
- Dianat, S.A. SNR Estimation in Nakagami Fading Channels with Arbitrary Constellation. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing—ICASSP ’07, Honolulu, HI, USA, 15–20 April 2007; Volume 2, pp. 325–328. [Google Scholar] [CrossRef]
- Demichelis, C. IP packet delay variation metric for IP performance metrics (IPPM). IETF RFC 2002, 3393, 1–21. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, S.; Zhao, J.; Zhang, H.; Li, X. Connectivity Analysis with Co-Channel Interference for Urban Vehicular Ad Hoc Networks. Electronics 2023, 12, 2021. https://doi.org/10.3390/electronics12092021
Ren S, Zhao J, Zhang H, Li X. Connectivity Analysis with Co-Channel Interference for Urban Vehicular Ad Hoc Networks. Electronics. 2023; 12(9):2021. https://doi.org/10.3390/electronics12092021
Chicago/Turabian StyleRen, Shihai, Junhui Zhao, Huan Zhang, and Xuan Li. 2023. "Connectivity Analysis with Co-Channel Interference for Urban Vehicular Ad Hoc Networks" Electronics 12, no. 9: 2021. https://doi.org/10.3390/electronics12092021
APA StyleRen, S., Zhao, J., Zhang, H., & Li, X. (2023). Connectivity Analysis with Co-Channel Interference for Urban Vehicular Ad Hoc Networks. Electronics, 12(9), 2021. https://doi.org/10.3390/electronics12092021