



Multi-Inverter Resonance Modal Analysis Based on Decomposed Conductance Model
Abstract
:1. Introduction
2. Modal Analysis Method
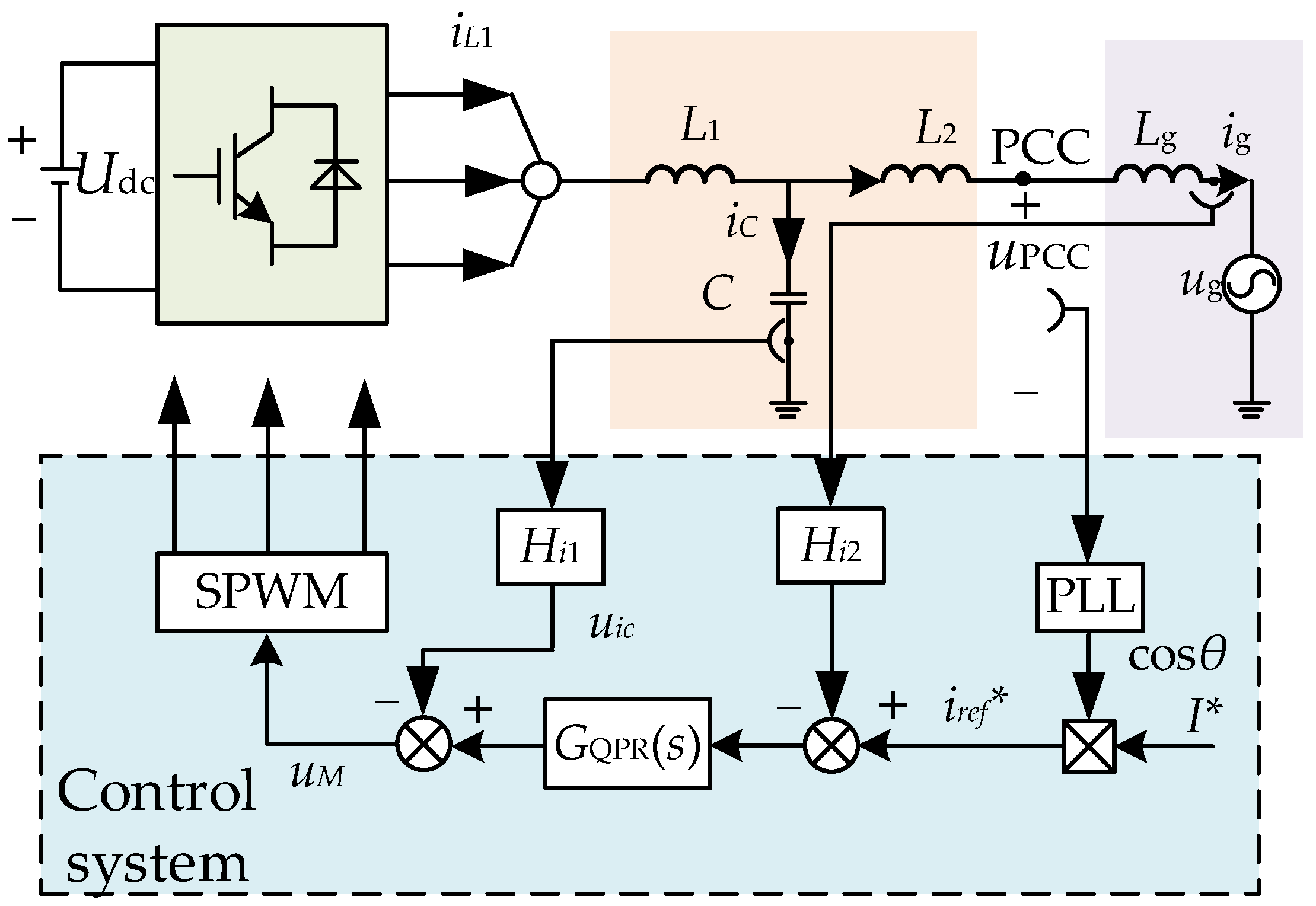
3. Single Inverter Modeling Based on Decomposed Conductance Model
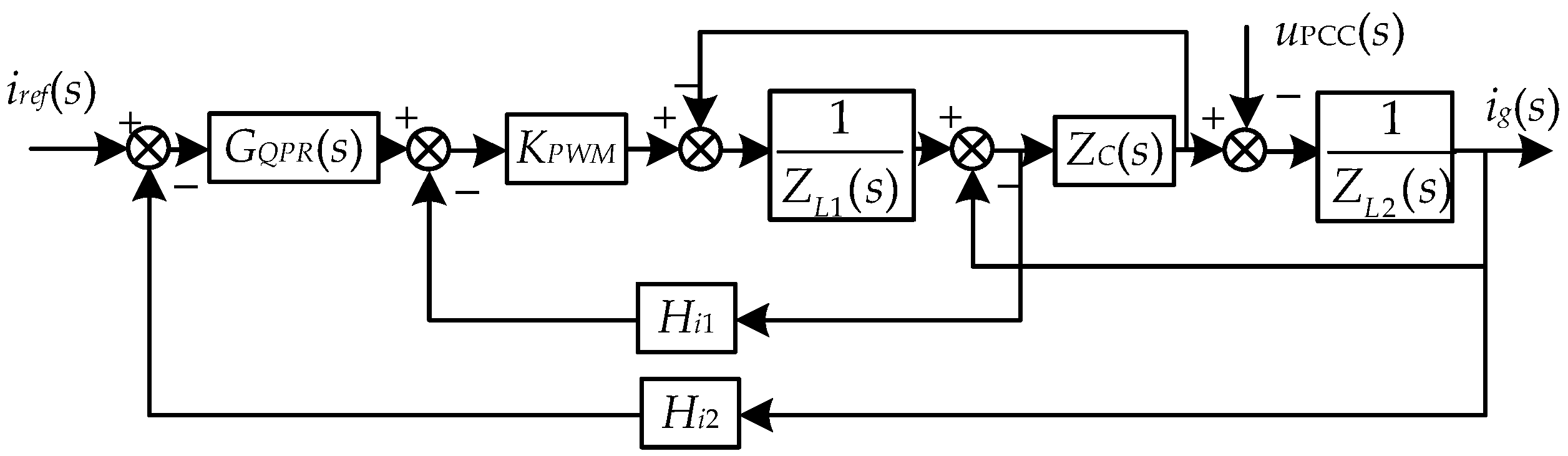
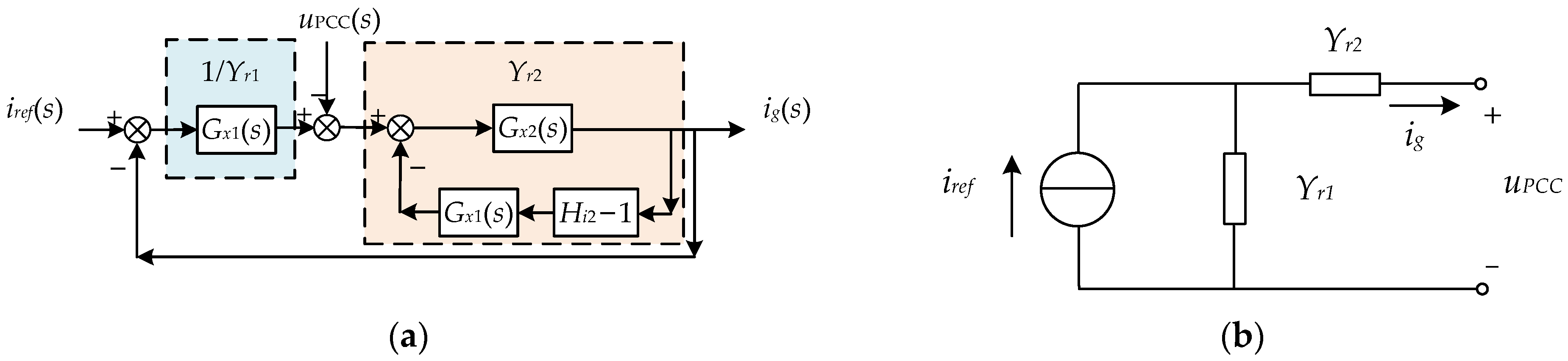
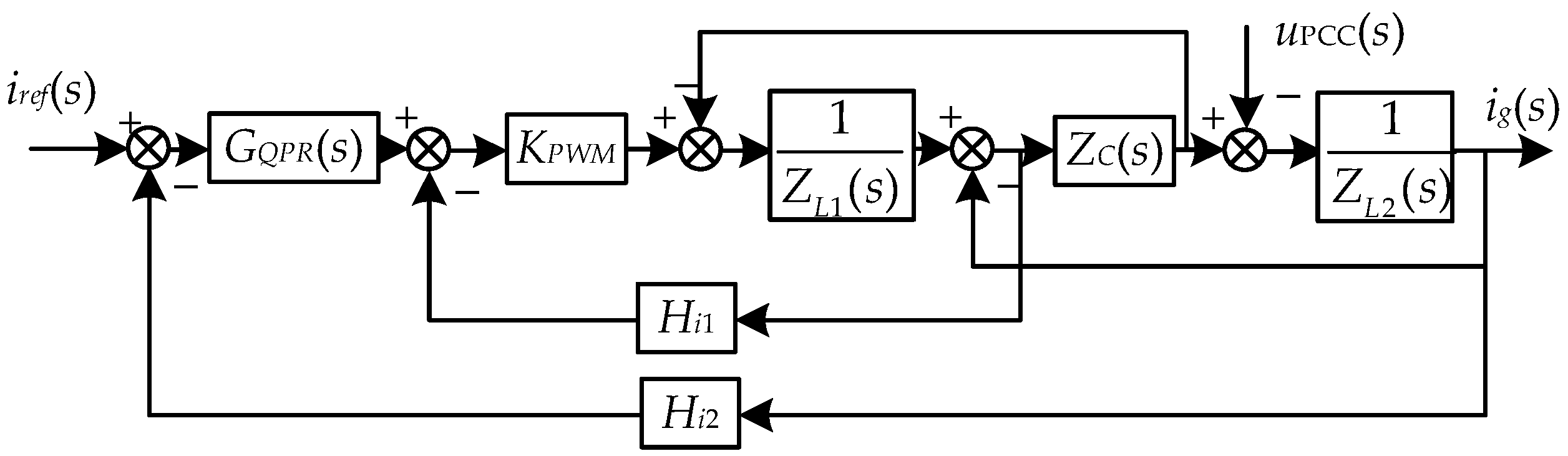
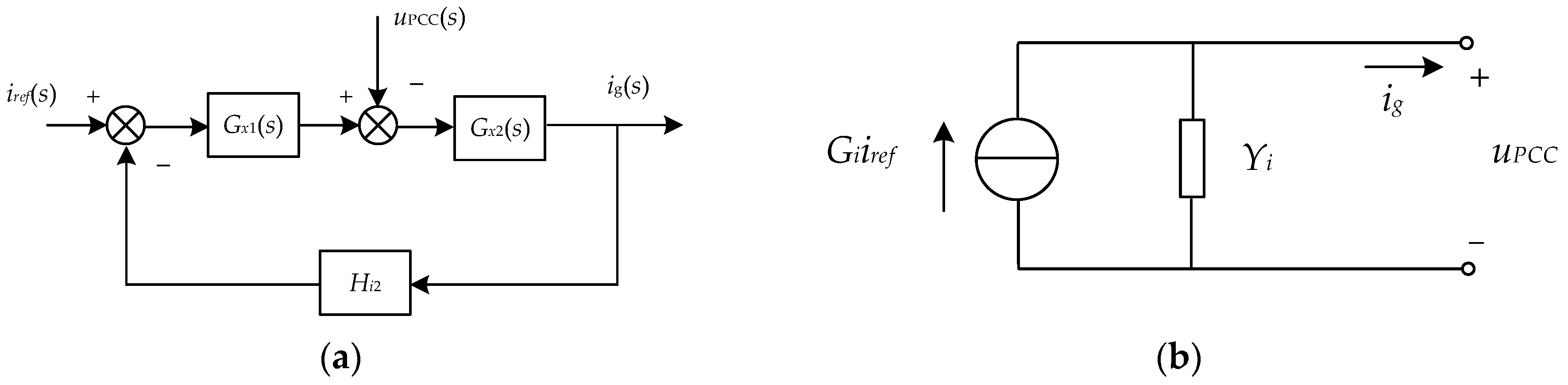
3.1. Norton Equivalent Modeling
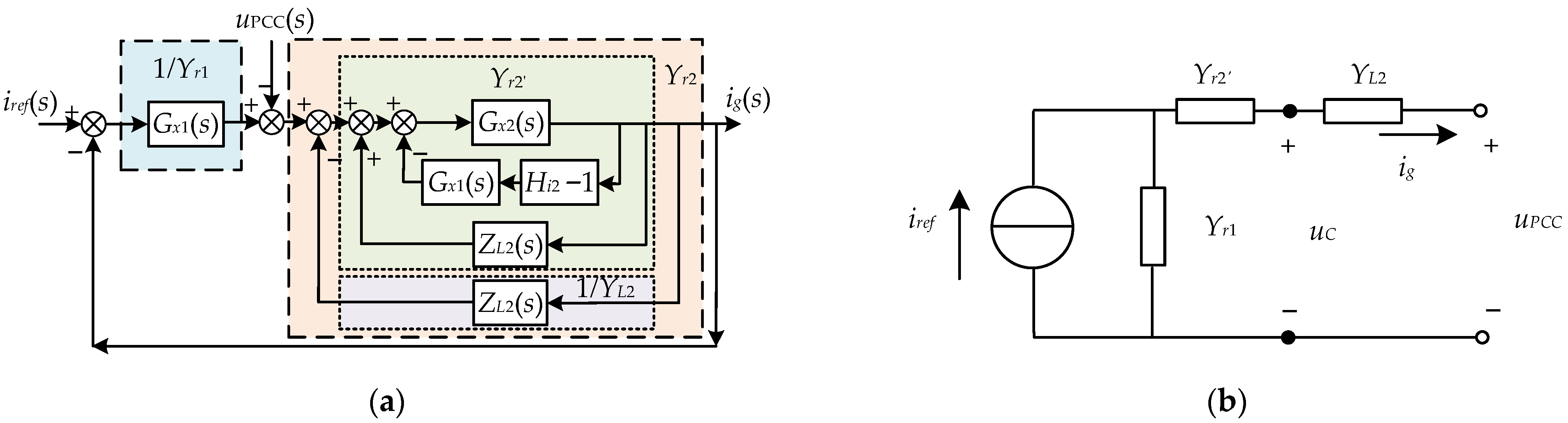
3.2. Decomposition Conductance Modeling
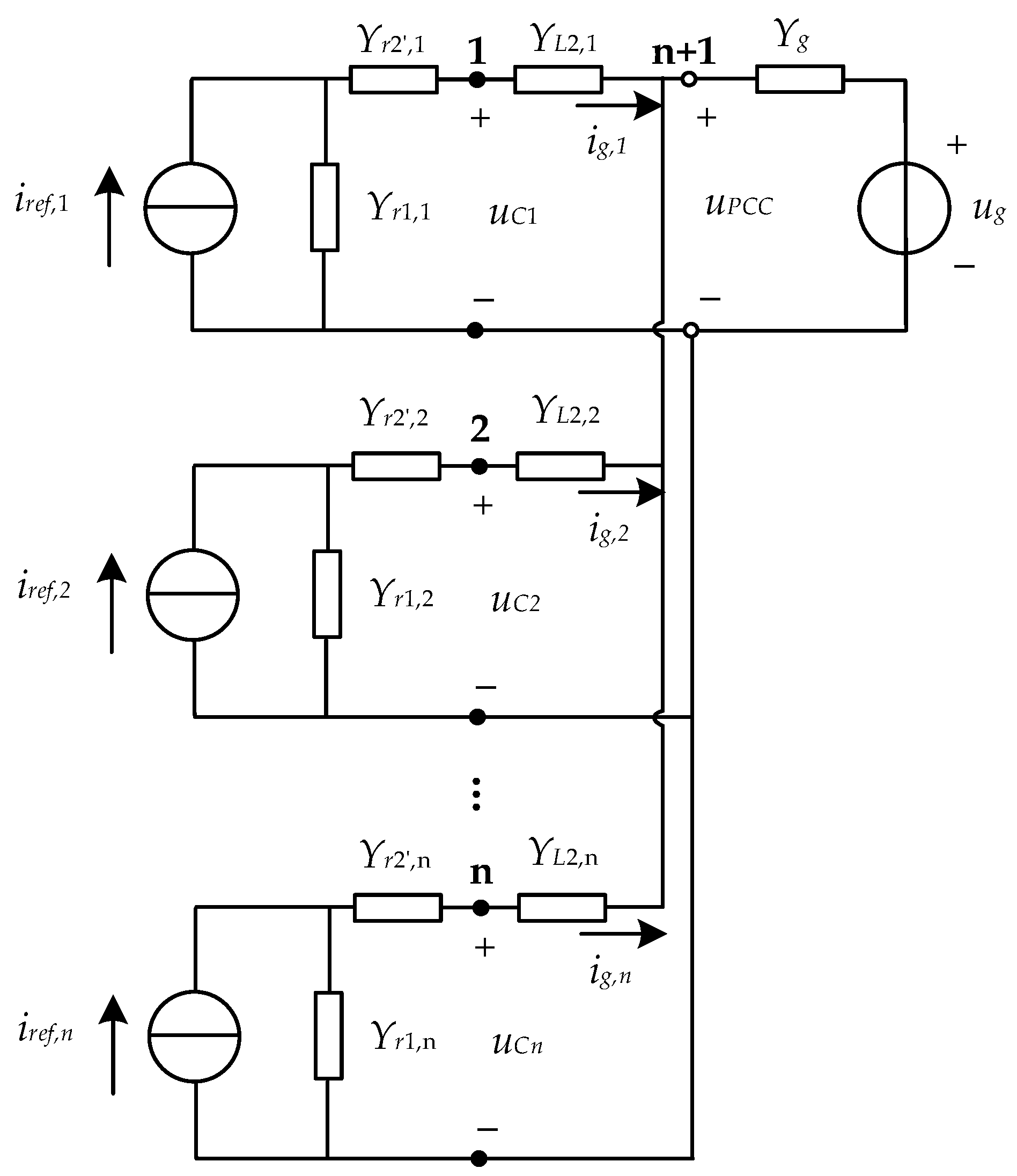
4. Multi-Inverter System Modeling Based on a Decomposed Conductance Model
5. Resonant Modal Analysis of a Multi-Inverter Grid-Connected System
5.1. Variation in the Number of Inverters n
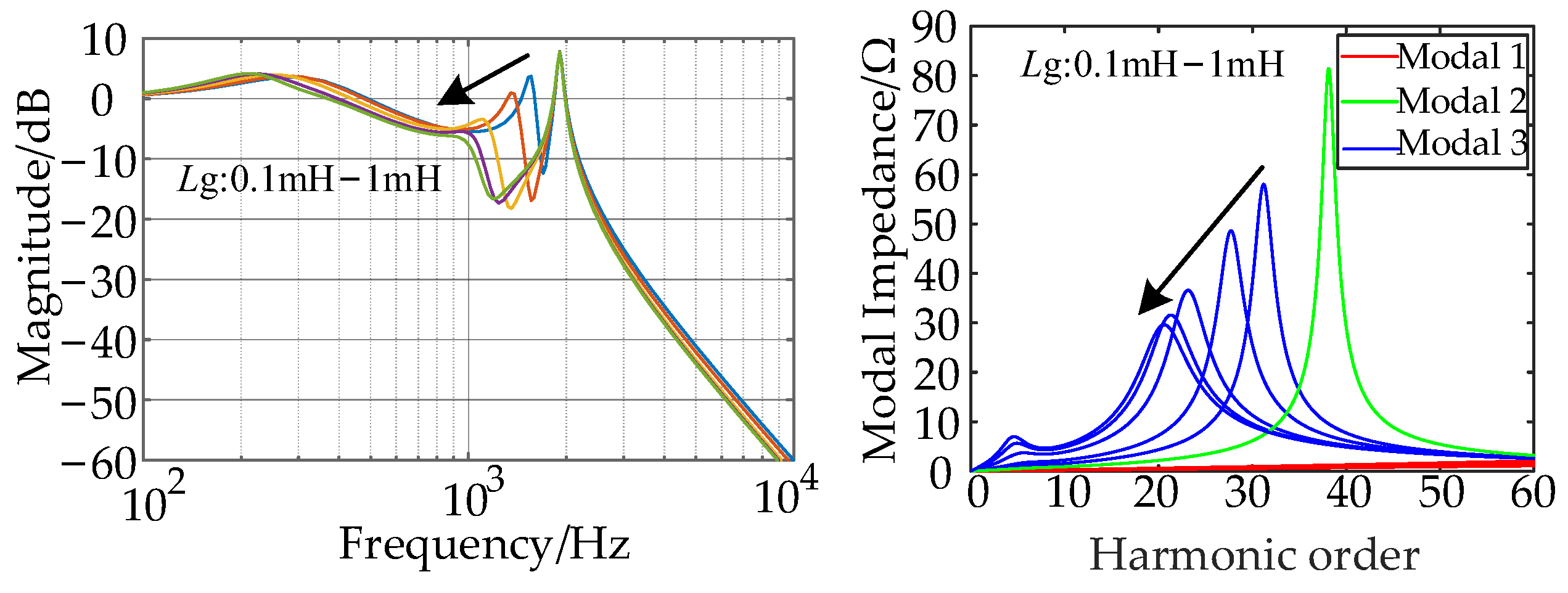
5.2. Impact of Grid Impedance Fluctuations
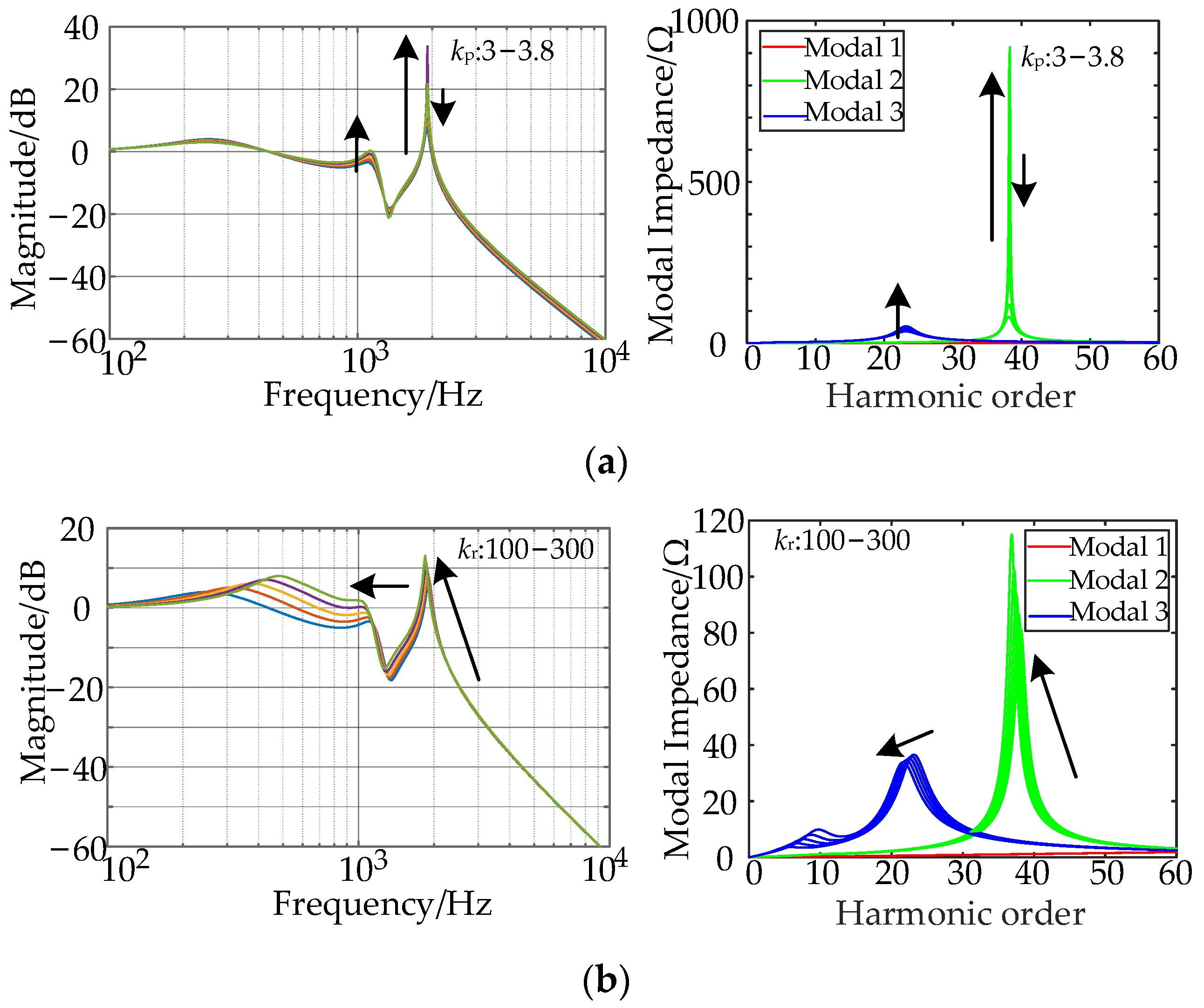
5.3. Impact of Changes in Inverter Control Parameters
5.4. Impact of LCL Filter Parameter Changes
5.5. Sensitivity Analysis
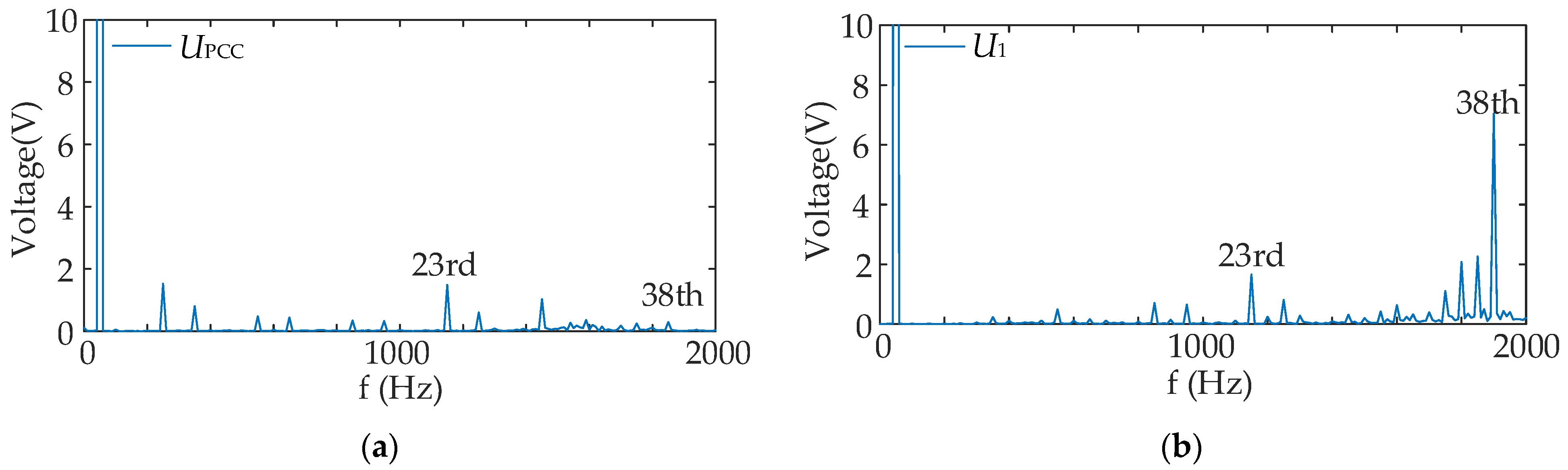
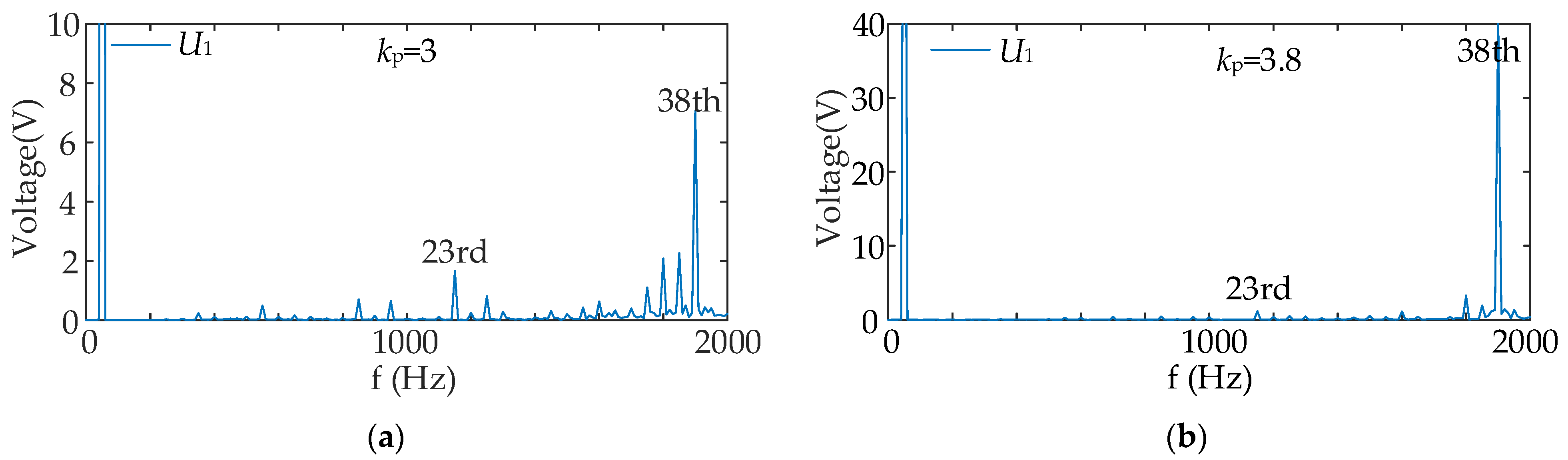
6. Simulation Verification
7. Conclusions
- The modal analysis method is easier to calculate than the frequency domain analysis method, which can reflect the resonance information of the multi-inverter system well and can better reflect the observability and excitable degree of resonance of each node of the system.
- The harmonic resonance of the multi-inverter grid-connected system is affected by the interaction between the inverter and the grid. When the grid impedance is taken into account, two kinds of resonance bands, low-frequency and high-frequency, are generated with the increase of the inverter, and the fluctuation of the grid impedance Lg only affects the low-frequency resonance, while the high-frequency resonance is not affected by it, so the interaction between the grid and the inverter only affects the low-frequency resonance.
- The inverter LCL filter parameters and controller parameter fluctuations will have an impact on the low-frequency and high-frequency resonance, where the LCL filter parameter fluctuations have a more significant impact on the resonance. In addition, kp has a more pronounced effect on the high-frequency resonant part.
- The multi-inverter grid-connected equivalent model based on the decomposition conductance model can refine the influence of each equivalent control link of the inverter on the resonance characteristics of the system through sensitivity analysis and quantify the contribution of the decomposition conductance, in which the first decomposition conductor Yr1 and the second decomposition conductor Yr2′ contribute to the high-frequency resonance to a greater extent.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sun, J.; Wu, T.; Ren, J.; Li, M.; Jiang, H. Control and research based on improved LADRC in wind power inverter systems. Electronics 2022, 11, 2833. [Google Scholar] [CrossRef]
- Hosseinzadeh, N.; Aziz, A.; Mahmud, A.; Gargoom, A.; Rabbani, M. Voltage stability of power systems with renewable-energy inverter-based generators: A Review. Electronics 2021, 8, 115. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Agorreta, J.L.; Borrega, M.; López, J.; Marroyo, L. Modeling and control of n-paralleled grid-connected inverters with LCL filter coupled due to grid impedance in PV plants. IEEE Trans. Power Electron. 2011, 26, 770–785. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2019, 10, 2858–2870. [Google Scholar] [CrossRef] [Green Version]
- Rygg, A.; Molinas, M.; Chen, Z.; Xu, C. A modified sequence-domain impedance definition and its equivalence to the dq-domain impedance definition for the stability analysis of AC power electronic systems. IEEE J. Emerging Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef] [Green Version]
- Bakhshizadeh, M.K.; Wang, X.; Blaabjerg, F.; Hjerrild, J.; Kocewiak, L.; Bak, C.L.; Hesselbek, B. Couplings in phase domain impedance modeling of grid-connected converters. IEEE Trans. Power Electron. 2016, 31, 6792–6796. [Google Scholar]
- Qi, Q.; Ghaderi, D.; Guerrero, J.M. Sliding mode controller-based switched-capacitor-based high DC gain and low voltage stress DC-DC boost converter for photovoltaic applications. Int. J. Electr. Power Energy Syst. 2021, 125, 106496. [Google Scholar] [CrossRef]
- Bulut, K.; Ertekin, D. A novel switched-capacitor and fuzzy logic-based quadratic boost converter with mitigated voltage stress, applicable for DC micro-grid. Electron. Eng. 2022, 104, 4391–4413. [Google Scholar]
- Ghaderi, D.; Bayrak, G.; Guerrero, J.M. Grid code compatibility and real-time performance analysis of an efficient inverter topology for PV-based microgrid applications. Int. J. Electr. Power Energy Syst. 2021, 128, 106712. [Google Scholar] [CrossRef]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Liserre, M.; Chen, Z.; He, J.; Li, Y. An Active Damper for stabilizing power-electronics-based AC systems. IEEE Trans. Power Electron. 2014, 29, 3318–3329. [Google Scholar] [CrossRef]
- Cao, W.; Ma, Y.; Wang, F. Sequence-impedance-based harmonic stability analysis and controller parameter design of three-phase inverter-based multibus AC power systems. IEEE Trans. Power Electron. 2017, 32, 7674–7693. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Inverse Nyquist stability criterion for grid-tied inverters. IEEE Trans. Power Electron. 2017, 32, 1548–1556. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, Z.; Ma, M.; Wang, M.; Deng, J.; Zhang, J.; Zhan, M. LCL Filter design method based on stability region and harmonic interaction for grid-connected inverters in weak grid. Proc. CSEE 2019, 39, 4231–4242. [Google Scholar]
- Nie, C.; Lei, W.; Wang, Y.; Wang, H.; Feng, G. Resonance analysis of multi-paralleled converter systems and research on optimal virtual resistor damping methods. Proc. CSEE 2017, 37, 1467–1478. [Google Scholar]
- Liao, S.; Chen, Y.; Wu, W.; Wang, L.; Xu, Q. Closed-loop interconnected model of multi-inverter-paralleled system and its application to impact assessment of interactions on damping characteristics. IEEE Trans. Smart Grid 2023, 14, 41–53. [Google Scholar] [CrossRef]
- Qin, B.; Xu, Y.; Yuan, C.; Jia, J. A Unified method of frequency oscillation characteristic analysis for multi-VSG grid-connected system. IEEE Trans. Power Deliv. 2022, 37, 279–289. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, F.; Zou, R.; Li, Y. Harmonic resonance characteristic of large-scale PV plant: Modelling, Analysis, and Engineering Case. IEEE Trans. Power Deliv. 2022, 37, 2359–2368. [Google Scholar] [CrossRef]
- Xu, W.; Huang, Z.; Cui, Y.; Wang, H. Harmonic resonance mode analysis. IEEE Trans. Power Deliv. 2005, 20, 1182–1190. [Google Scholar] [CrossRef]
- Hong, L.; Shu, W.; Wang, J.; Mian, R. Harmonic resonance investigation of a multi-inverter grid-connected system using resonance modal analysis. IEEE Trans. Power Deliv. 2019, 34, 63–72. [Google Scholar] [CrossRef]
- Wu, J.; Chen, T.; Han, W.; Zhao, J.; Li, B.; Xu, D. Modal analysis of resonance and stable domain calculation of active damping in multi-inverter grid-connected systems. J. Power Electron. 2018, 18, 185–194. [Google Scholar]
- Liu, Y.; Shuai, Z.; Li, Y.; Cheng, Y.; Shen, Z. Harmonic resonance modal analysis of multi-inverter grid-connected systems. Proc. CSEE 2017, 37, 4156–4164+4295. [Google Scholar]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Capacitor-current-feedback active damping with reduced computation delay for improving robustness of LCL-type grid-connected inverter. IEEE Trans. Power Electron. 2014, 29, 3414–3427. [Google Scholar] [CrossRef]
- Yu, C.; Zhang, X.; Liu, F.; Li, F.; Xu, H.; Cao, R.; Ni, H. Modeling and resonance analysis of multiparallel inverters system under asynchronous carriers conditions. IEEE Trans. Power Electron. 2017, 32, 3192–3205. [Google Scholar] [CrossRef]
- Wang, X.; Ruan, X.; Liu, S.; Tse, C.K. Full feedforward of grid voltage for grid-connected inverter with LCL filter to suppress current distortion due to grid voltage harmonics. IEEE Trans. Power Electron. 2010, 25, 3119–3127. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Power grid voltage | Ug/V | 220 |
| Power grid impedance | Lg/mH | 0.5 |
| Inverter-side inductor | L1/mH | 1.2 |
| Grid-side inductance | L2/mH | 0.3 |
| Filter Capacitor | C/μF | 28 |
| Quasi-proportional resonance controller parameters | kp | 3 |
| ki | 100 | |
| ωi/rad·s−1 | 5 | |
| Capacitive current feedback coefficient | Hi1 | 3 |
| Grid-connected current feedback coefficient | Hi2 | 1 |
| n | Frequency/pu | Node | ||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 2 | 23.1 | 0.3865 | 0.3865 | 0.2270 | — | — |
| 38.1 | 0.5000 | 0.5000 | 0 | — | — | |
| 3 | 21.5 | 0.2711 | 0.2711 | 0.2711 | 0.1867 | — |
| 38.1 | 0.6667 | 0.6667 | 0.6667 | 0 | — | |
| 4 | 20.6 | 0.2106 | 0.2106 | 0.2106 | 0.2106 | 0.1578 |
| 38.1 | 0.7480 | 0.7497 | 0.7414 | 0.7414 | 0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Xu, Y.; Tao, S.; Wang, T.; Sun, S. Multi-Inverter Resonance Modal Analysis Based on Decomposed Conductance Model. Electronics 2023, 12, 1251. https://doi.org/10.3390/electronics12051251
Chen L, Xu Y, Tao S, Wang T, Sun S. Multi-Inverter Resonance Modal Analysis Based on Decomposed Conductance Model. Electronics. 2023; 12(5):1251. https://doi.org/10.3390/electronics12051251
Chicago/Turabian StyleChen, Lin, Yonghai Xu, Shun Tao, Tianze Wang, and Shuguang Sun. 2023. "Multi-Inverter Resonance Modal Analysis Based on Decomposed Conductance Model" Electronics 12, no. 5: 1251. https://doi.org/10.3390/electronics12051251
APA StyleChen, L., Xu, Y., Tao, S., Wang, T., & Sun, S. (2023). Multi-Inverter Resonance Modal Analysis Based on Decomposed Conductance Model. Electronics, 12(5), 1251. https://doi.org/10.3390/electronics12051251